Движение по окружности с постоянной по модулю скоростью
теория по физике 🧲 кинематика
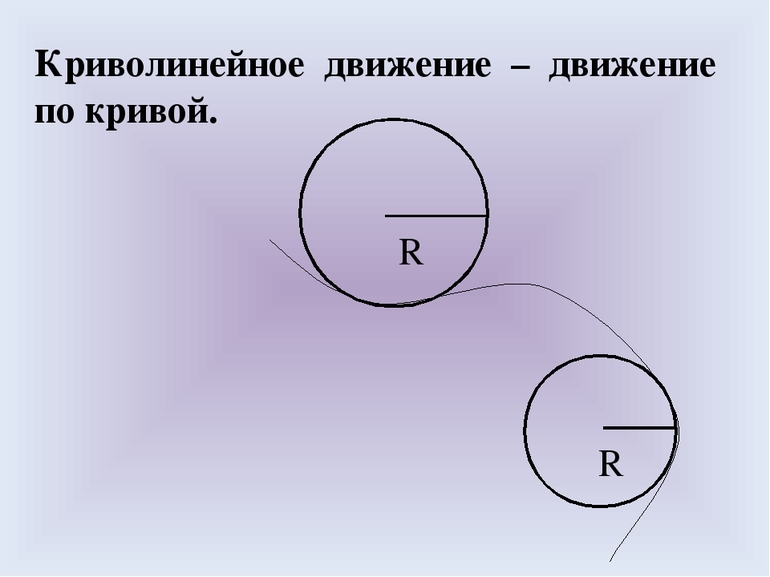
Криволинейное движение — движение, траекторией которого является кривая линия. Вектор скорости тела, движущегося по кривой линии, направлен по касательной к траектории. Любой участок криволинейного движения можно представить в виде движения по дуге окружности или по участку ломаной.
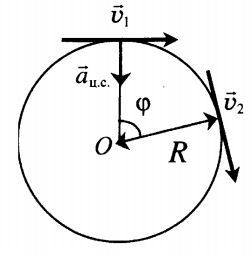
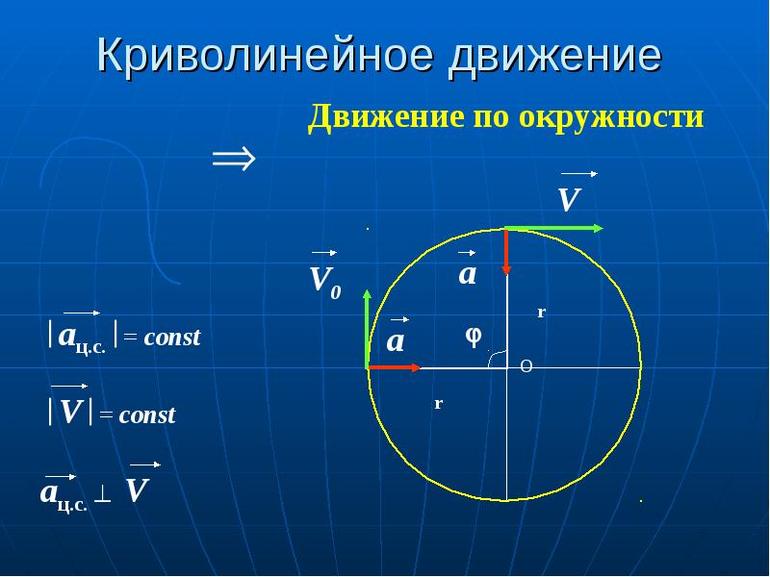
Движение по окружности с постоянной по модулю скоростью — частный и самый простой случай криволинейного движения. Это движение с переменным ускорением, которое называется центростремительным.
Особенности движения по окружности с постоянной по модулю скоростью:
- Траектория движения тела есть окружность.
- Вектор скорости всегда направлен по касательной к окружности.
- Направление скорости постоянно меняется под действием центростремительного ускорения.
- Центростремительное ускорение направлено к центру окружности и не вызывает изменения модуля скорости.
Период, частота и количество оборотов
Пусть тело двигается по окружности беспрерывно. Когда оно сделает один оборот, пройдет некоторое время. Когда тело сделает еще один оборот, пройдет еще столько же времени. Это время не будет меняться, потому что тело движется с постоянной по модулю скоростью. Такое время называют периодом.
Период — время одного полного оборота. Обозначается буквой T. Единица измерения — секунды (с).

t — время, в течение которого тело совершило N оборотов
За один и тот же промежуток времени тело может проходить лишь часть окружности или совершать несколько единиц, десятков, сотен или более оборотов. Все зависит от длины окружности и модуля скорости.
Частота — количество оборотов, совершенных в единицу времени. Обозначается буквой ν («ню»). Единица измерения — Гц.
N — количество оборотов, совершенных телом за время t.
Период и частота — это обратные величины, определяемые формулами:
Количество оборотов выражается следующей формулой:
Пример №1. Шарик на нити вращается по окружности. За 10 секунд он совершил 20 оборотов. Найти период и частоту вращения шарика.
Линейная и угловая скорости
Линейная скорость
Линейная скорость — это отношение пройденного пути ко времени, в течение которого этот путь был пройден. Обозначается буквой v. Единица измерения — м/с.

l — длина траектории, вдоль которой двигалось тело за время t
Линейную скорость можно выразить через период. За один период тело делает один оборот, то есть проходить путь, равный длине окружности. Поэтому его скорость равна:
R — радиус окружности, по которой движется тело
Если линейную скорость можно выразить через период, то ее можно выразить и через частоту — величину, обратную периоду. Тогда формула примет
Вид — группа особей, сходных по морфолого-анатомическим, физиолого-экологическим, биохимическим и генетическим признакам, занимающих естественный ареал, способных свободно скрещиваться между собой и давать плодовитое потомство.
Выразив частоту через количество оборотов и время, в течение которого тело совершало эти обороты, получим:
Угловая скорость
Угловая скорость — это отношение угла поворота тела ко времени, в течение которого тело совершало этот поворот. Обозначается буквой ω. Единица измерения — радиан в секунду (рад./с).

ϕ — угол поворота тела. t — время, в течение которого тело повернулось на угол ϕ
Радиан — угол, соответствующий дуге, длина которой равна ее радиусу. Полный угол равен 2π радиан.
За один полный оборот тело поворачивается на 2π радиан. Поэтому угловую скорость можно выразить через период:

Выражая угловую скорость через частоту, получим:
Выразив частоту через количество оборотов, формула угловой скорости примет вид:
Сравним две формулы:
Преобразуем формулу линейной скорости и получим:

Отсюда получаем взаимосвязь между линейной и угловой скоростями:
Полезные факты
- У вращающихся прижатых друг к другу цилиндров линейные скорости точек их поверхности равны: v1 = v2.
- У вращающихся шестерен линейные скорости точек их поверхности также равны: v1 = v2.
- Все точки вращающегося твердого тела имеют одинаковые периоды, частоты и угловые скорости, но разные линейные скорости. T1 = T2, ν1 = ν2, ω1 = ω2. Но v1 ≠ v2.
Пример №2. Период обращения Земли вокруг Солнца равен одному году. Радиус орбиты Земли равен 150 млн. км. Чему примерно равна скорость движения Земли по орбите? Ответ округлить до целых.
В году 365 суток, в одних сутках 24 часа, в 1 часе 60 минут, в одной минуте 60 секунд. Перемножив все эти числа между собой, получим период в секундах.

За каждую секунду Земля проходит расстояние, равное примерно 30 км.
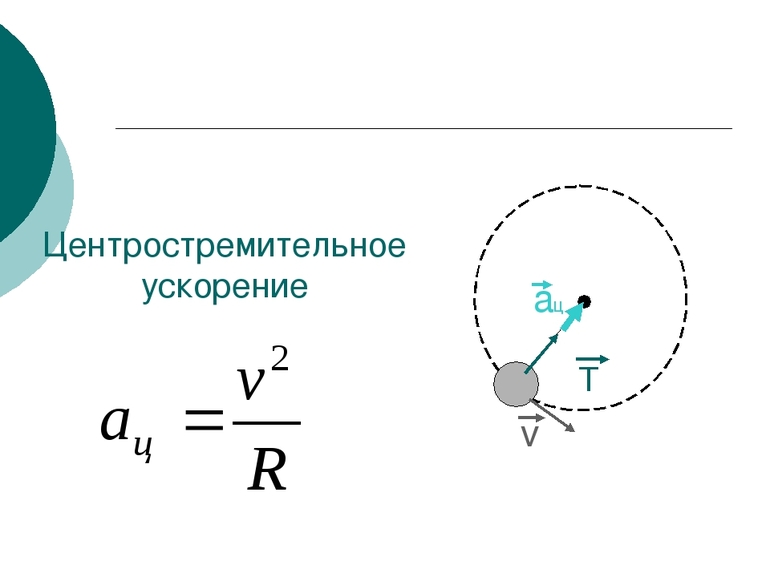
Центростремительное ускорение
Центростремительное ускорение — ускорение с постоянным модулем, но меняющимся направлением. Поэтому оно вызывает изменение направления вектора скорости, но не изменяет его модуль. Центростремительное ускорение обозначается как aц.с.. Единица измерения — метры на секунду в квадрате (м/с 2 ). Центростремительное ускорение можно выразить через линейную и угловую скорости, период, частоту и количество оборотов/время:

Пример №3. Рассчитать центростремительное ускорение льва, спящего на экваторе, в системе отсчета, две оси которой лежат в плоскости экватора и направлены на неподвижные звезды, а начало координат совпадает с центром Земли.
Спящий лев сделает один полный оборот тогда, когда Земля сделает один оборот вокруг своей оси. Земля делает это за время, равное 1 сутки. Поэтому период обращения равен 1 суткам. Количество секунд в сутках: 1 сутки = 24•60•60 секунд = 86400 секунд = 86,4∙10 3 секунд.
Радиус Земли равен 6400 км. В метрах это будет 6,4∙10 6 . Теперь у нас есть все, что нужно для вычисления центростремительного ускорения. Подставляем данные в формулу:

Алгоритм решения
- Записать исходные данные.
- Записать формулу для определения искомой величины.
- Подставить известные данные в формулу и произвести вычисления.
Решение
Записываем исходные данные:
- Радиус окружности, по которой движется автомобиль: R = 100 м.
- Скорость автомобиля во время движения по окружности: v = 20 м/с.
Формула, определяющая зависимость центростремительного ускорения от скорости движения тела:
Подставляем известные данные в формулу и вычисляем:
pазбирался: Алиса Никитина | обсудить разбор | оценить
Точка движется по окружности радиусом R с частотой обращения ν. Как нужно изменить частоту обращения, чтобы при увеличении радиуса окружности в 4 раза центростремительное ускорение точки осталось прежним?
а) увеличить в 2 раза б) уменьшить в 2 раза в) увеличить в 4 раза г) уменьшить в 4 раза
Алгоритм решения
- Записать исходные данные.
- Определить, что нужно найти.
- Записать формулу зависимости центростремительного ускорения от частоты.
- Преобразовать формулу зависимости центростремительного ускорения от частоты для каждого из случаев.
- Приравнять правые части формул и найти искомую величину.
Решение
Запишем исходные данные:
Центростремительное ускорение определяется формулой:
Запишем формулы центростремительного ускорения для 1 и 2 случаев соответственно:
Так как центростремительное ускорение в 1 и 2 случае одинаково, приравняем правые части уравнений:
Произведем сокращения и получим:


Это значит, чтобы центростремительное ускорение осталось неизменным после увеличения радиуса окружности в 4 раза, частота должна уменьшиться вдвое. Верный ответ: «б».
pазбирался: Алиса Никитина | обсудить разбор | оценить
Движение тела по криволинейной траектории. Движение по окружности. Характеристики вращательного движения. Центростремительное ускорение
Этот видеоурок доступен по абонементу
У вас уже есть абонемент? Войти

Вам хорошо известно, что в зависимости от формы траектории движение делится на прямолинейное и криволинейное. С прямолинейным движением мы научились работать на предыдущих уроках, а именно решать главную задачу механики для такого вида движения.
Однако ясно, что в реальном мире мы чаще всего имеем дело с криволинейным движением, когда траектория представляет собой кривую линию. Примерами такого движения является траектория тела, брошенного под углом к горизонту, движение Земли вокруг Солнца и даже траектория движения ваших глаз, следящих сейчас за этим конспектом.
Вопросу о том, как решается главная задача механики в случае криволинейного движения, и будет посвящен этот урок.
Движение по окружности
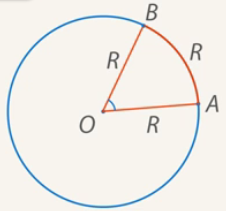
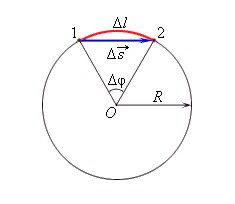
Движение по окружности — простейший случай криволинейного движения тела. Когда тело движется вокруг некоторой точки, наряду с вектором перемещения удобно ввести угловое перемещение ∆ φ (угол поворота относительно центра окружности), измеряемое в радианах.
Зная угловое перемещение, можно вычислить длину дуги окружности (путь), которую прошло тело.
Если угол поворота мал, то ∆ l ≈ ∆ s .
Угловая скорость
При криволинейном движении вводится понятие угловой скорости ω , то есть скорости изменения угла поворота.
Определение. Угловая скорость
Угловая скорость в данной точке траектории — предел отношения углового перемещения ∆ φ к промежутку времени ∆ t , за которое оно произошло. ∆ t → 0 .
ω = ∆ φ ∆ t , ∆ t → 0 .
Единица измерения угловой скорости — радиан в секунду ( р а д с ).
Существует связь между угловой и линейной скоростями тела при движении по окружности. Формула для нахождения угловой скорости:
Нормальное ускорение
При равномерном движении по окружности, скорости v и ω остаются неизменными. Меняется только направление вектора линейной скорости.
При этом равномерное движение по окружности на тело действует центростремительное, или нормальное ускорение, направленное по радиусу окружности к ее центру.
a n = ∆ v → ∆ t , ∆ t → 0
Модуль центростремительного ускорения можно вычислить по формуле:
a n = v 2 R = ω 2 R
Докажем эти соотношения.
Рассмотрим, как изменяется вектор v → за малый промежуток времени ∆ t . ∆ v → = v B → — v A → .
В точках А и В вектор скорости направлен по касательной к окружности, при этом модули скоростей в обеих точках одинаковы.
По определению ускорения:
a → = ∆ v → ∆ t , ∆ t → 0
Взглянем на рисунок:
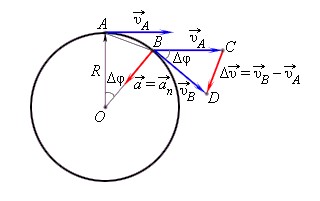
Треугольники OAB и BCD подобны. Из этого следует, что O A A B = B C C D .
Если значение угла ∆ φ мало, расстояние A B = ∆ s ≈ v · ∆ t . Принимая во внимание, что O A = R и C D = ∆ v для рассмотренных выше подобных треугольников получим:
R v ∆ t = v ∆ v или ∆ v ∆ t = v 2 R
При ∆ φ → 0 , направление вектора ∆ v → = v B → — v A → приближается к направлению на центр окружности. Принимая, что ∆ t → 0 , получаем:
a → = a n → = ∆ v → ∆ t ; ∆ t → 0 ; a n → = v 2 R .
При равномерном движении по окружности модуль ускорения остается постоянным, а направление вектора изменяется со временем, сохраняя ориентацию на центр окружности. Именно поэтому это ускорение называется центростремительным: вектор в любой момент времени направлен к центру окружности.
Запись центростремительного ускорения в векторной форме выглядит следующим образом:
Здесь R → — радиус вектор точки на окружности с началом в ее центре.
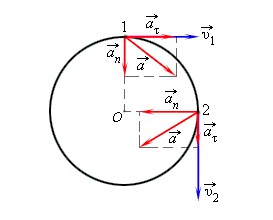
Тангенциальное ускорение
В общем случае ускорение при движении по окружности состоит из двух компонентов — нормальное, и тангенциальное.
Рассмотрим случай, когда тело движется по окружности неравномерно. Введем понятие тангенциального (касательного) ускорения. Его направление совпадает с направлением линейной скорости тела и в каждой точке окружности направлено по касательной к ней.
a τ = ∆ v τ ∆ t ; ∆ t → 0
Здесь ∆ v τ = v 2 — v 1 — изменение модуля скорости за промежуток ∆ t
Направление полного ускорения определяется векторной суммой нормального и тангенциального ускорений.
Движение по окружности в плоскости можно описывать при помощи двух координат: x и y. В каждый момент времени скорость тела можно разложить на составляющие v x и v y .
Если движение равномерное, величины v x и v y а также соответствующие координаты будут изменяться во времени по гармоническому закону с периодом T = 2 π R v = 2 π ω
http://interneturok.ru/lesson/physics/10-klass/mehanikakinematika/dvizhenie-tela-po-krivolineynoy-traektorii-dvizhenie-po-okruzhnosti-harakteristiki-vraschatelnogo-dvizheniya-tsentrostremitelnoe-uskorenie
http://zaochnik.com/spravochnik/fizika/kinematika/dvizhenie-po-okruzhnosti/
Криволинейное движение — движение, траекторией которого является кривая линия. Вектор скорости тела, движущегося по кривой линии, направлен по касательной к траектории. Любой участок криволинейного движения можно представить в виде движения по дуге окружности или по участку ломаной.
Движение по окружности с постоянной по модулю скоростью — частный и самый простой случай криволинейного движения. Это движение с переменным ускорением, которое называется центростремительным.
Особенности движения по окружности с постоянной по модулю скоростью:
- Траектория движения тела есть окружность.
- Вектор скорости всегда направлен по касательной к окружности.
- Направление скорости постоянно меняется под действием центростремительного ускорения.
- Центростремительное ускорение направлено к центру окружности и не вызывает изменения модуля скорости.
Период, частота и количество оборотов
Пусть тело двигается по окружности беспрерывно. Когда оно сделает один оборот, пройдет некоторое время. Когда тело сделает еще один оборот, пройдет еще столько же времени. Это время не будет меняться, потому что тело движется с постоянной по модулю скоростью. Такое время называют периодом.
Период — время одного полного оборота. Обозначается буквой T. Единица измерения — секунды (с).
t — время, в течение которого тело совершило N оборотов
За один и тот же промежуток времени тело может проходить лишь часть окружности или совершать несколько единиц, десятков, сотен или более оборотов. Все зависит от длины окружности и модуля скорости.
Частота — количество оборотов, совершенных в единицу времени. Обозначается буквой ν («ню»). Единица измерения — Гц.
N — количество оборотов, совершенных телом за время t.
Период и частота — это обратные величины, определяемые формулами:
Количество оборотов выражается следующей формулой:
Пример №1. Шарик на нити вращается по окружности. За 10 секунд он совершил 20 оборотов. Найти период и частоту вращения шарика.
Линейная и угловая скорости
Линейная скорость
Определение и формулы
Линейная скорость — это отношение пройденного пути ко времени, в течение которого этот путь был пройден. Обозначается буквой v. Единица измерения — м/с.
l — длина траектории, вдоль которой двигалось тело за время t
Линейную скорость можно выразить через период. За один период тело делает один оборот, то есть проходить путь, равный длине окружности. Поэтому его скорость равна:
R — радиус окружности, по которой движется тело
Если линейную скорость можно выразить через период, то ее можно выразить и через частоту — величину, обратную периоду. Тогда формула примет вид:
![]()
Выразив частоту через количество оборотов и время, в течение которого тело совершало эти обороты, получим:
Угловая скорость
Определение и формулы
Угловая скорость — это отношение угла поворота тела ко времени, в течение которого тело совершало этот поворот. Обозначается буквой ω. Единица измерения — радиан в секунду (рад./с).
ϕ — угол поворота тела. t — время, в течение которого тело повернулось на угол ϕ
Полезные факты
Радиан — угол, соответствующий дуге, длина которой равна ее радиусу. Полный угол равен 2π радиан.
За один полный оборот тело поворачивается на 2π радиан. Поэтому угловую скорость можно выразить через период:
Выражая угловую скорость через частоту, получим:
![]()
Выразив частоту через количество оборотов, формула угловой скорости примет вид:
Сравним две формулы:
![]()
Преобразуем формулу линейной скорости и получим:
Отсюда получаем взаимосвязь между линейной и угловой скоростями:
Полезные факты
- У вращающихся прижатых друг к другу цилиндров линейные скорости точек их поверхности равны: v1 = v2.
- У вращающихся шестерен линейные скорости точек их поверхности также равны: v1 = v2.
- Все точки вращающегося твердого тела имеют одинаковые периоды, частоты и угловые скорости, но разные линейные скорости. T1 = T2, ν1 = ν2, ω1 = ω2. Но v1 ≠ v2.
Пример №2. Период обращения Земли вокруг Солнца равен одному году. Радиус орбиты Земли равен 150 млн. км. Чему примерно равна скорость движения Земли по орбите? Ответ округлить до целых.
В году 365 суток, в одних сутках 24 часа, в 1 часе 60 минут, в одной минуте 60 секунд. Перемножив все эти числа между собой, получим период в секундах.
За каждую секунду Земля проходит расстояние, равное примерно 30 км.
Центростремительное ускорение
Определение и формула
Центростремительное ускорение — ускорение с постоянным модулем, но меняющимся направлением. Поэтому оно вызывает изменение направления вектора скорости, но не изменяет его модуль. Центростремительное ускорение обозначается как aц.с.. Единица измерения — метры на секунду в квадрате (м/с2). Центростремительное ускорение можно выразить через линейную и угловую скорости, период, частоту и количество оборотов/время:
Пример №3. Рассчитать центростремительное ускорение льва, спящего на экваторе, в системе отсчета, две оси которой лежат в плоскости экватора и направлены на неподвижные звезды, а начало координат совпадает с центром Земли.
Спящий лев сделает один полный оборот тогда, когда Земля сделает один оборот вокруг своей оси. Земля делает это за время, равное 1 сутки. Поэтому период обращения равен 1 суткам. Количество секунд в сутках: 1 сутки = 24•60•60 секунд = 86400 секунд = 86,4∙103 секунд.
Радиус Земли равен 6400 км. В метрах это будет 6,4∙106. Теперь у нас есть все, что нужно для вычисления центростремительного ускорения. Подставляем данные в формулу:
Задание EF18273
Верхнюю точку моста радиусом 100 м автомобиль проходит со скоростью 20 м/с. Центростремительное ускорение автомобиля равно…
Алгоритм решения
- Записать исходные данные.
- Записать формулу для определения искомой величины.
- Подставить известные данные в формулу и произвести вычисления.
Решение
Записываем исходные данные:
- Радиус окружности, по которой движется автомобиль: R = 100 м.
- Скорость автомобиля во время движения по окружности: v = 20 м/с.
Формула, определяющая зависимость центростремительного ускорения от скорости движения тела:
Подставляем известные данные в формулу и вычисляем:
Ответ: 4
pазбирался: Алиса Никитина | обсудить разбор
Задание EF17763
Точка движется по окружности радиусом R с частотой обращения ν. Как нужно изменить частоту обращения, чтобы при увеличении радиуса окружности в 4 раза центростремительное ускорение точки осталось прежним?
а) увеличить в 2 раза
б) уменьшить в 2 раза
в) увеличить в 4 раза
г) уменьшить в 4 раза
Алгоритм решения
- Записать исходные данные.
- Определить, что нужно найти.
- Записать формулу зависимости центростремительного ускорения от частоты.
- Преобразовать формулу зависимости центростремительного ускорения от частоты для каждого из случаев.
- Приравнять правые части формул и найти искомую величину.
Решение
Запишем исходные данные:
- Радиус окружности R1 = R.
- Радиус окружности R2 = 4R.
- Центростремительное ускорение: aц.с. = a1 = a2.
Найти нужно ν2.
Центростремительное ускорение определяется формулой:
![]()
Запишем формулы центростремительного ускорения для 1 и 2 случаев соответственно:
Так как центростремительное ускорение в 1 и 2 случае одинаково, приравняем правые части уравнений:
Произведем сокращения и получим:
![]()
Или:
Отсюда:
Это значит, чтобы центростремительное ускорение осталось неизменным после увеличения радиуса окружности в 4 раза, частота должна уменьшиться вдвое. Верный ответ: «б».
Ответ: б
pазбирался: Алиса Никитина | обсудить разбор
Алиса Никитина | Просмотров: 22k
Движение
называют криволинейным, если скорость
м. т. изменяется и по величине, и по
направлению.
Одной
из основных характеристик этого движения
считается ускорение. В реальной жизни
чаще всего встречается криволинейное
движение, когда величина скорости –
остаётся постоянной, а направление
непрерывно изменяется. Например,
равномерное движение м. т. по окружности.

Рис.
14
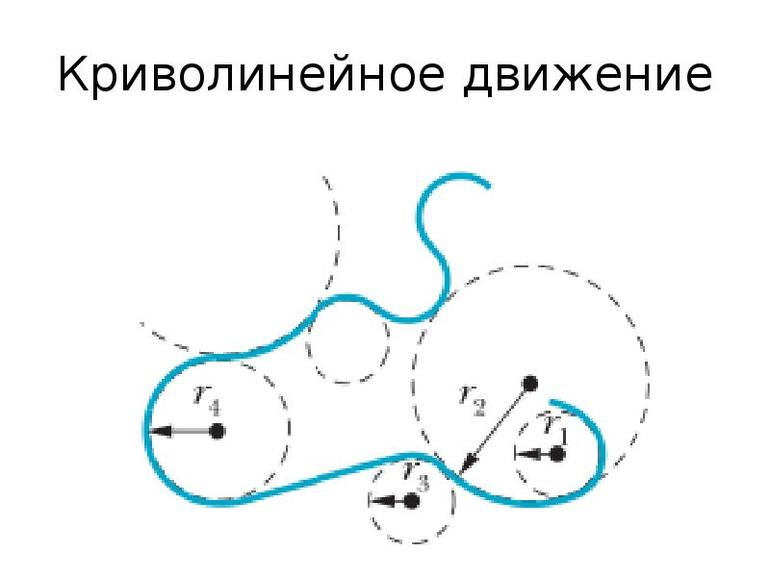
Рассмотрим движение м. т.
вдоль произвольной кривой.
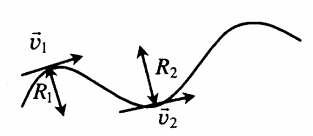
Из
математики известно, что малую часть
дуги любой плавной кривой (траектории)
можно заменить дугой окружности
некоторого радиуса R1
или R2
с центром в точке 01
или 02
(рис. 14).
Окружность,
которая в пределе совпадает с бесконечно
малой дугой произвольной кривой, называют
кругом кривизны.
Радиус
этой окружности называют радиусом
кривизны (R1
и
R2),
а центр окружности – центром кривизны
(т. 01
и т. 02,
рис. 14). Величину С =1/R называют кривизной
данной траектории.
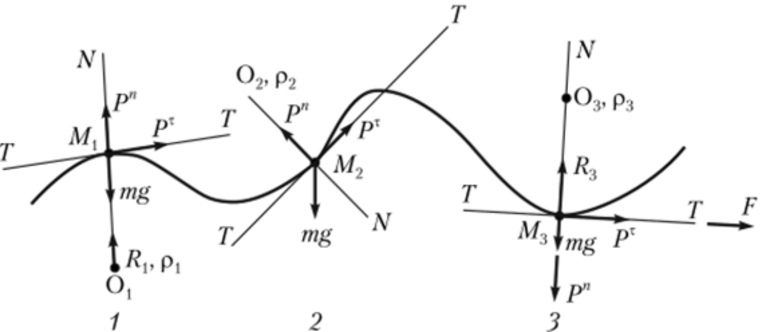
1.19. Центростремительное, тангенциальное
и полное
ускорения
Пусть
в плоской системе координат (XOY)
движется м. т., описывая криволинейную
траекторию. В произвольный момент
времени t1
материальная
точка при движении со скоростью
![]() находилась в пункте А. В следующий
находилась в пункте А. В следующий
момент времениt2
она находится в пункте В, имея скорость
![]() (рис. 15). Если интервал времениt
(рис. 15). Если интервал времениt
мал, то участок криволинейной траектории
представляет собой некоторую дугу
АЕ, которая в пределе совпадает с дугой
некоторого круга кривизны радиуса R с
центром в точке 0. Скорости
![]() и
и![]() отличаются и по величине, и по направлению,
отличаются и по величине, и по направлению,
т.
е.
![]() иV1
иV1
V2
.

Рис.
15
Перенесём
вектор
![]() (можно и вектор
(можно и вектор![]() )
)
параллельно самому себе так, чтобы
совпали начала векторов![]() и
и![]() в точке А.
в точке А.
Соединим
концы векторов
![]() и
и![]() направленным отрезком ВД и обозначим
направленным отрезком ВД и обозначим
его![]() .
.
Вектор
![]()
является
вектором изменения (приращения) скорости
(рис. 15) за время t
и характеризует изменение скорости,
как по величине,
так
и по
направлению.
На
отрезке АВ (модуль вектора
![]() )
)
отложим отрезок АС, равный по величине
модулю вектора![]() .
.![]() – хорда АЕ, следует, что
– хорда АЕ, следует, что
 ,
,
где
![]() = vDt,
= vDt,
так как АС =
![]()
После преобразования
 ,
,
поскольку
R = const и
![]() = сonst, так как вектор в квадрате есть
= сonst, так как вектор в квадрате есть
скаляр. В связи с тем, что изменение
скорости
![]() произошло
произошло
за время Dt,
разделим левую и правую части на Dt:
 .
.
По определению
мгновенного ускорения, имеем: слева
– вектор полного ускорения

справа – первое
слагаемоe
 ,
,
(34)
второе
слагаемое
 (35)
(35)
Тогда
![]() ,
,
(36)

Рис.
16
![]() ,
,
(37)
т.
е. аn
=
v2/R,
(38)
где
![]() – единичный вектор нормали.
– единичный вектор нормали.
Он
направлен по радиусу к центру круга
кривизны (рис.16), так как с переходом к
пределу, когда точки А и Е сливаются,
скорость
![]() приближается к
приближается к![]() и уголÐ
и уголÐ
a
0 (рис.15).
Соответственно
углы АСД и АДC равны и стремятся к 90о.
Следовательно,
в пределе вектор
![]() (
(![]() или
или![]() )
)
направлен по радиусу к центру круга
кривизны и называется
центростремительным (нормальным)
ускорением.
Вектор
центростремительного ускорения направлен
по радиусу к центру круга кривизны и
характеризует изменение скорости по
направлению. Рассмотрим
вторую составляющую полного ускорения.
Соединим
точки С и Д направленным отрезком,
который обозначим вектором
![]() ,
,
характеризующим изменение скорости
только понаправлению.
Направленный
отрезок ВС назовем вектором
![]() ,
,
характеризующим изменение скорости по
величине,
т. е.
![]() .
.
Согласно
рис. 15,
![]() .
.
(33)
Из подобия
равнобедренных треугольников ОАЕ и
АСД, где модуль
Вектор
 (39)
(39)
называют
тангенциальным
(касательным) ускорением,
где
![]() – единичный вектор, направленный по
– единичный вектор, направленный по
касательной к траектории, т. е.
( )
) ,
,![]()
Вектор касательного
ускорения характеризует изменение
скорости по величине, направлен по
касательной к траектории в данной точке.
При
произвольном криволинейном движении
материальной точки полное ускорение
может быть разложено на две составляющие:
![]() ,
,
где
![]() .
.
Вектор
полного ускорения характеризует
изменение скорости по величине и
направлению, направлен внутрь кривизны
траектории.
Модуль полного
ускорения
![]() .
.
(40)
Возникновение
нормального и тангенциального ускорений
наблюдается, например, при движении
искусственных спутников Земли.
 201). Окружность с центром в точке Р и радиусом, равным радиусу кривизны кривой в данной точке , называется кругом кривизны. Если задано уравнение траектории, то радиус ее кривизны в любой точке можно определить при помощи дифференциального исчисления. 7.19. Определить скорость, касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
201). Окружность с центром в точке Р и радиусом, равным радиусу кривизны кривой в данной точке , называется кругом кривизны. Если задано уравнение траектории, то радиус ее кривизны в любой точке можно определить при помощи дифференциального исчисления. 7.19. Определить скорость, касательное и нормальное ускорения, радиус кривизны траектории точки для заданного момента времени.
Чем больше радиус окружности, тем меньше ее кривизна. Так как кривизна кривой, вообще говоря, изменяется при переходе от данной ее точки к другой, то и радиус кривизны является переменной величиной. Длина, на которую сматывается нить с эволюты, равна, очевидно, приращению радиуса кривизны эвольвенты. Обычно кривизна определяется для каждой точки на «объекте» и выражается как значение некоторого дифференциального выражения 2-го порядка.

В этой статье приводятся только несколько простейших примеров определений понятия кривизны. Если кривизна кривой равна нулю, то соприкасающаяся окружность вырождается в прямую. Главные кривизны являются экстремальными значениями нормальных кривизн.
Для расчета кривизны удобно перейти от канонического уравнения эллипса к уравнению в параметрической форме: где (t) − параметр. Нахождение радиуса кривизны траектории – одна из важных тем школьного курса физики, т.к. решение ряда задач динамики связано с нахождением радиуса кривизны траектории.
Существует несколько способов нахождения радиуса кривизны, один из которых связан с использованием дифференциального исчисления, а другой основан на применении физических понятий. При рассмотрении движения тел используется ряд характеризующих величин, например тангенциальное и нормальное (центростремительное) ускорение, скорость, а также кривизна траектории.
Наиболее часто встречаются задачи на определение радиуса кривизны траектории полета брошенного тела в заданный промежуток времени. Траектория движения в данном случае описывается уравнениями на координатных осях: х = f(t), y = f(t), где t – время, в момент которого требуется найти радиус. Обычно кривизну определяют в отдельности для каждой искомой точки на заданном «объекте» и обозначают ее как значение второго порядка дифференциального выражения.

Определить, линзы какого радиуса кривизны вам нужны, может врач офтальмолог, произведя необходимые замеры. В медицинском центре или клинике врач офтальмолог после проведения специальных замеров (например, при помощи авторефкератометра), определит базовую кривизну Ваших глаз и выпишет Вам рецепт.
I. Окружность имеет одинаковую кривизну во всех своих точках. Ускорение a точки в каждый данный момент времени характеризует быстроту изменения скорости. Таким образом, движение точки классифицируется по двум признакам: по степени неравномерности движения и по виду траектории.
Иначе, при равномерном движении по криволинейной траектории точка имеет нормальное ускорение, направленное по нормали к траектории и численно равное an = v2/R, где R – радиус кривизны траектории. Если же постоянным остается только числовое значение касательного уравнения at = dv/dt = f'(t) = const, то an≠0 и такое движение точки называется равнопеременным криволинейным.
Здесь s0 – расстояние точки от исходного положения в момент начала отсчета; v0 – начальная скорость и at – касательное ускорение – величины численно постоянные, a s и t – переменные. При решении многих технических задач возникает необходимость знать радиус кривизны R (или 1/R – кривизну) траектории. Здесь – орты осей и ; – проекции скорости и ускорения точки на оси координат.
Этот способ основан на том, что радиус кривизны траектории движущейся точки входит в формулу an = v2/R, выражающую числовое значение нормального ускорения. Определение радиуса кривизны траектории при помощи уравнений движения точки в координатной форме называется кинематическим способом.
Читайте также:
Общие сведения
В физике даётся вполне однозначное определение движению. Под ним понимают изменение положения физической точки в пространстве по отношению с другими объектами. Считается, что любое тело состоит из совокупности точек, перемещающихся одинаково по отношению друг к другу. Поэтому любой объект принято обозначать в виде элементарной точки.
Кинематика не изучает, почему движение таково, а рассматривает только путь перемещения. С точки зрения физики, криволинейное движение — это путь, пройденный материальной точкой по кривой траектории. Если же траектория прямая, то изменение положения называется прямолинейным.
Криволинейное движение — это всегда ускоренное перемещение. Оно может быть:
- Равномерным. В этом случае скорость перемещения по модулю остаётся постоянной на всём прошедшем расстоянии. Например, движение по окружности.
- Равноускоренным. Признаком такого движения является изменение скорости и направления. Например, брошенное тело под углом.
Основной характеристикой понятия является вектор перемещения. Обозначается он латинской буквой S со стрелочкой вверху. Направлен он всегда по хорде. Кроме вектора, передвижение по кривой линии определяется тангенциальным и нормальным ускорением.
В первом случае характеристика обозначает изменение величины скорости в единицу времени: at = lim Δv / Δt, где: v — начальная скорость в момент времени t0 + Δt. Тангенциальное ускорение может как совпадать по направлению со скоростью, так и быть ей противоположной.
Нормальным ускорением называют характеристику, перпендикулярную направлению скорости: an = V2 / r, где: r — радиус окружности. Оно всегда совпадает с радиусом кривизны пути. Подвидом такого ускорения является центростремительная сила. Проявляется она при равномерном перемещении по окружности.
Таким образом, если движение является криволинейным, то вектора скорости и ускорения не лежат на одной прямой. Из простых примеров криволинейного движения можно выделить: течение воды в реке, перелёт на самолёте, катание на колесе обозрения.
Центростремительное ускорение
Если движение равномерное, но происходит оно по кривой, всё равно будет фиксироваться ускорение точки. Это происходит из-за того, что ускорение определяется как изменение скорости к промежутку времени. Поэтому если точка движется равномерно, то это значит, что модуль скорости остаётся одинаковым, но направление вектора изменяется. То есть будет справедливо записать: v = v0, но v ≠ v0. Можно сделать вывод, что изменение скорости существует, если Δv ≠ 0, при этом ускорение тоже не равно нулю: a ≠ 0.
Рассмотрим самый простой вид криволинейного перемещения. Существует история, что ещё во времена Аристотеля древние греки считали окружность идеальной линией. Из-за этого исторического факта астрономам приходилось объяснять движение планет, как комбинацию перемещений космических тел по окружности.
Можно представить тело, изменяющее своё положение по окружности. Траектория перемещения в декартовой системе координат будет выглядеть в виде полусферы. Пусть за её центр будет принята точка O. Тело движется равномерно. В какой-то момент времени его скорость будет V0. Её вектор направлен по касательной и совпадает по направлению с перемещением тела. Через некоторое время объект переместится в другую точку. Его скорость по-прежнему останется направленной по касательной, при этом модуль не изменится. То есть V = V0, но вектора их неравны: V ≠ V0.
Пусть стоит задача — найти равномерное движение по окружности. Иными словами, определить направление вектора и вычислить его модуль. В первую очередь необходимо узнать, куда же направлен вектор ускорения. Чтобы ответить на этот вопрос, нужно опираться на исходную формулу: a = Δv / Δt. Отсюда можно сделать вывод, что куда будет направлен вектор V, туда будет направлено и ускорение a.
Для наглядности можно построить вектор изменения скорости частицы, движущейся по рассматриваемой траектории. Чтобы построить график, описывающий ситуацию, нужно перенести V0 параллельно вектору V к его началу. Соединив два свободных конца перпендикуляром, получится треугольник. По правилу вычитания векторов можно получить вектор изменения скорости: Δv = V — V0. Направлен он будет сверху вниз.
Так как V0 направлен по касательной перпендикулярно радиусу, при этом угол треугольника при основании стремится к нулю, можно утверждать, что Δv перпендикулярен V. Значит, и вектор ускорения перпендикулярен V. Отсюда следует, что вектор ускорения направлен к центру окружности, поэтому его и называют центростремительным ускорением.
Движение по произвольной кривой
Рассмотрим простейший случай равномерного перемещения. Можно представить ситуацию, что если руль автомобиля держать неподвижно, то он будет ехать по прямой или по окружности. В реальной ситуации при езде всё время приходится поворачивать руль автомобиля, то есть в каждый момент времени происходит перемещение по окружности. При этом с каждым поворотом колеса управления радиус окружности изменяется. В данный момент времени он всегда совпадает с траекторией движения и называется радиусом кривизны траектории.
На графике движения можно отметить несколько точек. В одной из них скорость будет равняться V1. Немного дальше пройденное расстояние изменится, но скорость останется той же. Поменяется и направление V2. Через определённое время скорость будет равняться V3. Это движение равномерное.
Относительно точки V1 можно построить касающуюся её окружность с центром r1. По аналогии движения за рулём, это то же самое, что в рассматриваемой точке зафиксировать поворот управления на постоянный угол. Для V2 центр радиуса находится в точке r2, а V3 в r3.
В любом из этих трёх случаев происходит движение по окружности. То есть криволинейное движение произвольной формы — это перемещение по окружности любого радиуса. Если же радиус изменяется, то в любой момент меняется и центростремительное ускорение. Но при этом направление всегда совпадает с радиусом. Самое большое ускорение будет в том месте, где радиус самый маленький, и наоборот. Таким образом можно утверждать, что всякий раз ускорение будет перпендикулярно скорости при равномерном движении.
Кроме центростремительного ускорения, важными характеристиками, описывающими движение, являются следующие величины:
- Период. Показывает, за сколько времени точка совершит один оборот: T = t /n. Где t — время, за которое происходит определённое число оборотов, равное n.
- Частота. Определяет, сколько оборотов совершенно за единицу времени: λ = n / t.
- Угловая скорость. Является отношением угла поворота радиуса ко времени, за который произошёл поворот: W = φ / Δt = 2 * p / T = V / r.
Это основные формулы для криволинейного движения, использующиеся при решении задач. Кроме того, в заданиях используется связь между линейной и угловой скоростями: v = w * r, а также формула полного ускорения: a = at + an.
Решение простых задач
Виды движения изучаются на уроках физики в седьмом классе средней школы. На них ученикам объясняют понятия поступательного и равномерного движения, даются необходимые уравнения. Решение задач на уроках необходимо для закрепления пройденного материала и реального понимания ситуаций, при которых используются знания о видах перемещения.
Вот некоторые типы заданий, часто встречающиеся в различных вариантах у учащихся при сдаче ими тестов или написании контрольных работ:
- Линейная скорость точек рабочей поверхности наждачного круга диаметром 300 мм не должна превышать 35 метров в секунду. Допустима ли посадка круга на вал электродвигателя, совершающего обращение со скоростью 1400 оборотов в минуту? Согласно условию, необходимо найти, как связаны между собой V1 c Vmax. То есть линейную скорость и частоту вращения. Для расчёта необходимо использовать формулу связи скоростей: v = w * r. Так как поверхность абразива плоская, то радиус его будет равняться: r = d / 2. Подставив все исходные данные, можно записать: v = 2 * p * n / 2 = p * n * d = 3,14 * 1400 * 1/60с * 0,3 м = 22 м/с. Следовательно, из полученного значения можно сделать вывод, что посадка допустима.
- Какова линейная скорость точек земной поверхности на широте 46,50 при суточном вращении? Радиус Земли принять равным 6400 км. Другими словами, нужно выяснить линейную скорость. Широта рассчитывается вдоль меридиана и, по сути, это угол, измеряемый между двумя точками. Одна из них находится на экваторе, а другая — в указанном месте. Между радиусами, проведёнными из этих точек, угол составляет φ. Решить поставленную задачу можно, используя формулы: v = w * r и w = 2 * p / T. Следует учесть, что радиус, соответствующий 46,50, будет меньше радиуса Земли. Для того чтобы найти нужное значение, необходимо построить виртуальный треугольник и, используя тригонометрические формулы, записать, что cos φ = r / R. Учитывая, что направлена мгновенная скорость при криволинейном движении к центру, формула будет иметь вид: V = (2 * p / T) * R * cos φ = (6,28 * 6400 * 103 * cos 46,50) / 24 * 3,600 c = 465 * 0,69 м/с = 320 м/с.
Таким образом решать задачи на нахождение различных параметров при криволинейном движении без учёта его вызвавшей причины несложно. При этом следует правильно определить тип движения и знать основные формулы.
Пример сложного уровня
В большей мере такого уровня задачи являются поучительными, так как они используются для реальных случаев. Например, при расчётах работы различных технических установок. Вот одна из них.
Пусть движение от шкива один к шкиву четыре передаётся при помощи двух временных передач. Найти частоту вращения в оборотах в минуту и угловую скорость шкива четыре, если шкив один делает 1200 об/мин, а радиусы шкивов: R1 — 8 см, R2 — 32 см, R3 — 11 см, R4 — 55 см, при этом они жёстко укреплены на одном валу. Передающие ремни принять идеальными.
Для решения этой задачи нужно вначале определить направление вращения. Из условия задачи следует, что первый шкив будет вращаться в другую сторону по сравнению с остальными тремя. Для того чтобы найти угловую скорость последнего ролика, нужно будет последовательно определить параметры предшествующих ему шкивов.
Линейная скорость точек движения на ролике первого и второго шкива одинакова. Это следует из того, что ремни идеальные, не проскакивают и не растягиваются. Таким образом будет справедливо записать: V1 = V2. Так как w1 * r1 = w2 * r2, можно составить отношение: r1 / r2 = w1 / w2 или r1 / r2 = 2 * p * n2 / 2 * p * n1. То есть отношение примет вид: r1 / r2 = n2 / n1.
Так как третий шкив закреплён жёстко на валу со вторым, то образованную систему можно считать одним твёрдым телом. Применительно к нему можно говорить об общей угловой скорости или одинаковой частоте вращения. Получается, что n3 = n2. Тогда можно записать: n3 = n1 = r1 / r2.
На следующем шаге необходимо определить линейную скорость на четвёртом ролике. Из условия известно, что V3 = V4, так как их соединение идеальное. Это значит, что можно связать скорости третьего и четвёртого шкива с частотами: V4 = 2 *p * n4 * r4; V3 = 2 * p * n3. Из полученного равенства нужно выразить n4. Оно будет равняться: n4 = n3 * r3 / r4. В эту формулу необходимо подставить n3 и получить итоговую формулу: n4 = n1 * (r1 * r3) / (r2 * r4).
Теперь нужно подставить исходные данные и выполнить расчёт. При этом переходить в систему СИ нет необходимости: n1 = 1200 об/мин * (8 * 11) / (32 * 55) = 1200 * 1 / 20 об/мин = 60 об/мин. Для того чтобы найти угловую скорость, частоту необходимо умножить на 2p. При этом учесть, что угловая скорость измеряется в радианах в секунду. Поэтому w4 = 2 * p * n4 = 6, 28 * 1 = 6,28 рад/сек. Интересной особенностью является то, что частота вращения первого шкива в двадцать раз больше четвёртого. Задача решена.