Как найти резонансную частоту
Резонансная частота любого колебания равна его собственной частоте. С этой частотой и действуйте на колебательную систему для достижения резонанса. Чтобы найти резонансную частоту математического маятника, измерьте его длину, затем произведите соответствующие вычисления. Подобным образом находится резонансная частота пружинного маятника, струны и колебательного контура.

Вам понадобится
- линейка или рулетка, весы, динамометр, прибор для измерения электроемкости и индуктивности.
Инструкция
Определение резонансной частоты математического и пружинного маятникаВозьмите математический маятник (небольшое по размерам тело на сравнительно длинной нити) и линейкой или рулеткой измерьте длину нити. После этого число 9,81 (значение ускорения свободного падения), поделите на длину нити маятника в метрах, из полученного числа извлеките квадратный корень и результат поделите на 6,28. Ответом будет резонансная частота математического маятника.Для измерения резонансной частоты пружинного маятника измерьте массу груза на нем с помощью весов и узнайте жесткость пружины. Поделите значение жесткости пружины на массу груза, извлеките из результата квадратный корень и поделите число 6,28. Получите резонансную частоту пружинного маятника.Действуя на маятник внешним колебанием рассчитанной частоты, можно добиться резонанса (увеличения амплитуды колебаний).
Резонансная частота струныНайдите массу струны с помощью чувствительных весов в килограммах. Затем натяните ее на инструменте, замерив с помощью динамометра силу ее натяжения в ньютонах. Линейкой или рулеткой измерьте ее длину. Для расчета резонансной частоты силу натяжения поделите на массу струны и ее длину. Из получившегося числа извлеките квадратный корень, а результат поделите на 2.Если струну натянуть на резонатор с такой же собственной частотой, громкость звука значительно увеличится.
Резонансная частота колебательного контураИзмерьте индуктивность катушки и электроемкость колебательного контура. Для этого используйте универсальный прибор с соответствующими настройками. Перемножьте значения электроемкости и индуктивности, из полученного числа извлеките квадратный корень, а результат поделите на 6,28.Присоединив к данному контуру колебательный контур с резонансной частотой, можно добиться значительного увеличения амплитудных значений силы тока.
Видео по теме
Войти на сайт
или
Забыли пароль?
Еще не зарегистрированы?
This site is protected by reCAPTCHA and the Google Privacy Policy and Terms of Service apply.
Механические колебания.
-
Гармонические колебания.
-
Уравнение гармонических колебаний.
-
Пружинный маятник.
-
Математический маятник.
-
Свободные и вынужденные колебания.
Автор — профессиональный репетитор, автор учебных пособий для подготовки к ЕГЭ Игорь Вячеславович Яковлев
Темы кодификатора ЕГЭ : гармонические колебания; амплитуда, период, частота, фаза колебаний; свободные колебания, вынужденные колебания, резонанс.
Колебания — это повторяющиеся во времени изменения состояния системы. Понятие колебаний охватывает очень широкий круг явлений.
Колебания механических систем, или механические колебания — это механическое движение тела или системы тел, которое обладает повторяемостью во времени и происходит в окрестности положения равновесия. Положением равновесия называется такое состояние системы, в котором она может оставаться сколь угодно долго, не испытывая внешних воздействий.
Например, если маятник отклонить и отпустить, то начнутся колебания. Положение равновесия — это положение маятника при отсутствии отклонения. В этом положении маятник, если его не трогать, может пребывать сколь угодно долго. При колебаниях маятник много раз проходит положение равновесия.
Сразу после того, как отклонённый маятник отпустили, он начал двигаться, прошёл положение равновесия, достиг противоположного крайнего положения, на мгновение остановился в нём, двинулся в обратном направлении, снова прошёл положение равновесия и вернулся назад. Совершилось одно полное колебание. Дальше этот процесс будет периодически повторяться.
Амплитуда колебаний тела — это величина его наибольшего отклонения от положения равновесия.
Период колебаний  — это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
— это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
Частота колебаний  — это величина, обратная периоду:
— это величина, обратная периоду:  . Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
. Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
к оглавлению ▴
Гармонические колебания.
Будем считать, что положение колеблющегося тела определяется одной-единственной координатой  . Положению равновесия отвечает значение
. Положению равновесия отвечает значение  . Основная задача механики в данном случае состоит в нахождении функции
. Основная задача механики в данном случае состоит в нахождении функции ") , дающей координату тела в любой момент времени.
, дающей координату тела в любой момент времени.
Для математического описания колебаний естественно использовать периодические функции. Таких функций много, но две из них — синус и косинус — являются самыми важными. У них много хороших свойств, и они тесно связаны с широким кругом физических явлений.
Поскольку функции синус и косинус получаются друг из друга сдвигом аргумента на  , можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
, можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
Гармонические колебания — это колебания, при которых координата зависит от времени по гармоническому закону:
") (1)
(1)
Выясним смысл входящих в эту формулу величин.
Положительная величина  является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому — амплитуда колебаний.
является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому — амплитуда колебаний.
Аргумент косинуса  называется фазой колебаний. Величина
называется фазой колебаний. Величина  , равная значению фазы при
, равная значению фазы при  , называется начальной фазой. Начальная фаза отвечает начальной координате тела:
, называется начальной фазой. Начальная фаза отвечает начальной координате тела:  .
.
Величина называется  циклической частотой. Найдём её связь с периодом колебаний и частотой
циклической частотой. Найдём её связь с периодом колебаний и частотой  . Одному полному колебанию отвечает приращение фазы, равное
. Одному полному колебанию отвечает приращение фазы, равное  радиан:
радиан:  , откуда
, откуда
 (2)
(2)
 (3)
(3)
Измеряется циклическая частота в рад/с (радиан в секунду).
В соответствии с выражениями (2) и (3) получаем ещё две формы записи гармонического закона (1):
, x=Acos(2 pi nu t + alpha)") .
.
График функции (1), выражающей зависимость координаты от времени при гармонических колебаниях, приведён на рис. 1.
 |
| Рис. 1. График гармонических колебаний |
Гармонический закон вида (1) носит самый общий характер. Он отвечает, например, ситуации, когда с маятником совершили одновременно два начальных действия: отклонили на величину  и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
Пусть маятник отклонили, но начальной скорости не сообщали (отпустили без начальной скорости). Ясно, что в этом случае  , поэтому можно положить
, поэтому можно положить  . Мы получаем закон косинуса:
. Мы получаем закон косинуса:
 .
.
График гармонических колебаний в этом случае представлен на рис. 2.
 |
| Рис. 2. Закон косинуса |
Допустим теперь, что маятник не отклоняли, но ударом сообщили ему начальную скорость из положения равновесия. В этом случае  , так что можно положить
, так что можно положить  . Получаем закон синуса:
. Получаем закон синуса:
 .
.
График колебаний представлен на рис. 3.
 |
| Рис. 3. Закон синуса |
к оглавлению ▴
Уравнение гармонических колебаний.
Вернёмся к общему гармоническому закону (1). Дифференцируем это равенство:
") . (4)
. (4)
Теперь дифференцируем полученное равенство (4):
") . (5)
. (5)
Давайте сопоставим выражение (1) для координаты и выражение (5) для проекции ускорения. Мы видим, что проекция ускорения отличается от координаты лишь множителем  :
:
 . (6)
. (6)
Это соотношение называется уравнением гармонических колебаний. Его можно переписать и в таком виде:
 . (7)
. (7)
C математической точки зрения уравнение (7) является дифференциальным уравнением. Решениями дифференциальных уравнений служат функции (а не числа, как в обычной алгебре).
Так вот, можно доказать, что:
-решением уравнения (7) является всякая функция вида (1) с произвольными  ;
;
-никакая другая функция решением данного уравнения не является.
Иными словами, соотношения (6), (7) описывают гармонические колебания с циклической частотой  и только их. Две константы определяются из начальных условий — по начальным значениям координаты и скорости.
и только их. Две константы определяются из начальных условий — по начальным значениям координаты и скорости.
к оглавлению ▴
Пружинный маятник.
Пружинный маятник — это закреплённый на пружине груз, способный совершать колебания в горизонтальном или вертикальном направлении.
Найдём период малых горизонтальных колебаний пружинного маятника (рис. 4). Колебания будут малыми, если величина деформации пружины много меньше её размеров. При малых деформациях мы можем пользоваться законом Гука. Это приведёт к тому, что колебания окажутся гармоническими.
Трением пренебрегаем. Груз имеет массу  , жёсткость пружины равна
, жёсткость пружины равна  .
.
Координате отвечает положение равновесия, в котором пружина не деформирована. Следовательно, величина деформации пружины равна модулю координаты груза.
 |
| Рис. 4. Пружинный маятник |
В горизонтальном направлении на груз действует только сила упругости  со стороны пружины. Второй закон Ньютона для груза в проекции на ось
со стороны пружины. Второй закон Ньютона для груза в проекции на ось  имеет вид:
имеет вид:
 . (8)
. (8)
Если  (груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и
(груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и  . Наоборот, если
. Наоборот, если  , то
, то  . Знаки и
. Знаки и  всё время противоположны, поэтому закон Гука можно записать так:
всё время противоположны, поэтому закон Гука можно записать так:

Тогда соотношение (8) принимает вид:

или
 .
.
Мы получили уравнение гармонических колебаний вида (6), в котором
 .
.
Циклическая частота колебаний пружинного маятника, таким образом, равна:
 . (9)
. (9)
Отсюда и из соотношения  находим период горизонтальных колебаний пружинного маятника:
находим период горизонтальных колебаний пружинного маятника:
 . (10)
. (10)
Если подвесить груз на пружине, то получится пружинный маятник, совершающий колебания в вертикальном направлении. Можно показать, что и в этом случае для периода колебаний справедлива формула (10).
к оглавлению ▴
Математический маятник.
Математический маятник — это небольшое тело, подвешенное на невесомой нерастяжимой нити (рис. 5). Математический маятник может совершать колебания в вертикальной плоскости в поле силы тяжести.
 |
| Рис. 5. Математический маятник |
Найдём период малых колебаний математического маятника. Длина нити равна  . Сопротивлением воздуха пренебрегаем.
. Сопротивлением воздуха пренебрегаем.
Запишем для маятника второй закон Ньютона:
 ,
,
и спроектируем его на ось :
 .
.
Если маятник занимает положение как на рисунке (т. е. ), то:
 .
.
Если же маятник находится по другую сторону от положения равновесия (т. е. ), то:
 .
.
Итак, при любом положении маятника имеем:
 . (11)
. (11)
Когда маятник покоится в положении равновесия, выполнено равенство  . При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство
. При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство  . Воспользуемся им в формуле (11):
. Воспользуемся им в формуле (11):
 ,
,
или
 .
.
Это — уравнение гармонических колебаний вида (6), в котором
 .
.
Следовательно, циклическая частота колебаний математического маятника равна:
 . (12)
. (12)
Отсюда период колебаний математического маятника:
 . (13)
. (13)
Обратите внимание, что в формулу (13) не входит масса груза. В отличие от пружинного маятника, период колебаний математического маятника не зависит от его массы.
к оглавлению ▴
Свободные и вынужденные колебания.
Говорят, что система совершает свободные колебания, если она однократно выведена из положения равновесия и в дальнейшем предоставлена сама себе. Никаких периодических внешних
воздействий система при этом не испытывает, и никаких внутренних источников энергии, поддерживающих колебания, в системе нет.
Рассмотренные выше колебания пружинного и математического маятников являются примерами свободных колебаний.
Частота, с которой совершаются свободные колебания, называется собственной частотой колебательной системы. Так, формулы (9) и (12) дают собственные (циклические) частоты колебаний пружинного и математического маятников.
В идеализированной ситуации при отсутствии трения свободные колебания являются незатухающими, т. е. имеют постоянную амплитуду и длятся неограниченно долго. В реальных колебательных системах всегда присутствует трение, поэтому свободные колебания постепенно затухают (рис. 6).
 |
| Рис. 6. Затухающие колебания |
Вынужденные колебания — это колебания, совершаемые системой под воздействием внешней силы ") , периодически изменяющейся во времени (так называемой вынуждающей силы).
, периодически изменяющейся во времени (так называемой вынуждающей силы).
Предположим, что собственная частота колебаний системы равна  , а вынуждающая сила зависит от времени по гармоническому закону:
, а вынуждающая сила зависит от времени по гармоническому закону:
=F_{0}cos omega t") .
.
В течение некоторого времени происходит установление вынужденных колебаний: система совершает сложное движение, которое является наложением выужденных и свободных колебаний. Свободные колебания постепенно затухают, и в установившемся режиме система совершает вынужденные колебания, которые также оказываются гармоническими. Частота установившихся вынужденных колебаний совпадает с частотой
вынуждающей силы (внешняя сила как бы навязывает системе свою частоту).
Амплитуда установившихся вынужденных колебаний зависит от частоты вынуждающей силы. График этой зависимости показан на рис. 7.
 |
| Рис. 7. Резонанс |
Мы видим, что вблизи частоты  наступает резонанс — явление возрастания амплитуды вынужденных колебаний. Резонансная частота приближённо равна собственной частоте колебаний системы:
наступает резонанс — явление возрастания амплитуды вынужденных колебаний. Резонансная частота приближённо равна собственной частоте колебаний системы:  , и это равенство выполняется тем точнее, чем меньше трение в системе. При отсутствии трения резонансная частота совпадает с собственной частотой колебаний,
, и это равенство выполняется тем точнее, чем меньше трение в системе. При отсутствии трения резонансная частота совпадает с собственной частотой колебаний,  , а амплитуда колебаний возрастает до бесконечности при
, а амплитуда колебаний возрастает до бесконечности при  .
.
Благодарим за то, что пользуйтесь нашими материалами.
Информация на странице «Механические колебания.» подготовлена нашими редакторами специально, чтобы помочь вам в освоении предмета и подготовке к экзаменам.
Чтобы успешно сдать нужные и поступить в высшее учебное заведение или колледж нужно использовать все инструменты: учеба, контрольные, олимпиады, онлайн-лекции, видеоуроки, сборники заданий.
Также вы можете воспользоваться другими статьями из разделов нашего сайта.
Публикация обновлена:
08.05.2023
Вынужденные
колебания
— колебания, происходящие под воздействием
внешних сил, меняющихся во времени.
Автоколебания
отличаются от вынужденных колебаний
тем, что последние вызваны периодическим
внешним воздействием и происходят с
частотой этого воздействия, в то время
как возникновение автоколебаний и их
частота определяются внутренними
свойствами самой автоколебательной
системы.
Второй
закон Ньютона для такого осциллятора
запишется в виде:
![]() .
.
Если ввести обозначения:![]() и
и
заменить ускорение на вторую производную
от координаты по времени, то получим
следующее дифференциальное уравнение:![]()
Решением
этого уравнения будет сумма общего
решения однородного уравнения и частного
решения неоднородного. Общее решение
однородного уравнения было уже получено
здесь и оно имеет вид:
![]()
где
A,φ
произвольные
постоянные, которые определяются из
начальных условий.
Найдём
частное решение. Для этого подставим в
уравнение решение вида:
![]() и
и
получим значение для константы:![]()
Тогда
окончательное решение запишется в виде:
![]()
Резонаìнс
(фр. resonance,
от лат. resono —
откликаюсь) —
явление резкого
возрастания амплитуды вынужденных
колебаний, которое наступает при
приближении частоты внешнего воздействия
к некоторым значениям (резонансным
частотам), определяемым свойствами
системы.
Увеличение
амплитуды — это лишь следствие резонанса,
а причина — совпадение внешней
(возбуждающей) частоты с внутренней
(собственной) частотой колебательной
системы. При помощи явления резонанса
можно выделить и/или усилить даже весьма
слабые периодические колебания.
Резонанс —
явление,
заключающееся в том, что при некоторой
частоте вынуждающей силы колебательная
система оказывается особенно отзывчивой
на действие этой силы.
Наиболее
известная большинству людей механическая
резонансная система — это обычные
качели. Если вы будете подталкивать
качели в соответствии с их резонансной
частотой, размах движения будет
увеличиваться, в противном случае
движения будут затухать. Резонансную
частоту такого маятника с достаточной
точностью в диапазоне малых смещений
от равновесного состояния, можно найти
по формуле:
![]()
где
g
это ускорение свободного падения (9,8
м/с² для
поверхности Земли), а L
— длина от точки подвешивания маятника
до центра его масс
Резонансные
явления могут вызвать необратимые
разрушения в различных механических
системах, например, неправильно
спроектированных мостах. Так, в 1905 году
рухнул Египетский мост в Санкт-Петербурге,
когда по нему проходил конный эскадрон,
а в 1940 — разрушился Такомский мост в
США. Чтобы предотвратить такие повреждения
существует правило, заставляющее строй
солдат сбивать шаг при прохождении
мостов.
Р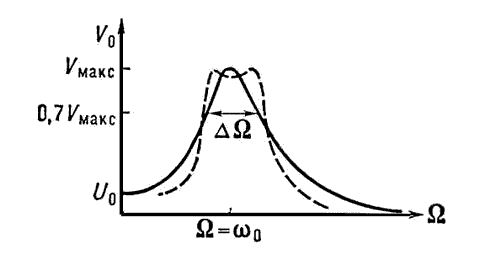 езонансная
езонансная
кривая колебательного контура
Резонансная
кривая колебательного контура: w0 —
частота собственных колебаний; W —
частота вынужденных колебаний; DW —
полоса частот вблизи w0, на границах
которой амплитуда колебаний V = 0,7 Vmakc.
Пунктир — резонансная кривая двух
связанных контуров.
26. Основные понятия и исходные положения положения термодинамики. Обратимые и необратимые процессы. Круговые процессы (циклы).
Термодинамика —
раздел физики, изучающий соотношения
и превращения теплоты и других форм
энергии
Перечень
начал термодинамики
Первое
начало термодинамики представляет
собой закон сохранения энергии в
применении к термодинамическим системам.(
Количество теплоты, полученное системой,
идёт на изменение её внутренней энергии
и совершение работы против внешних сил)
ΔU
= Q − A
Второе
начало термодинамики накладывает
ограничения на направление термодинамических
процессов, запрещая самопроизвольную
передачу тепла от менее нагретых тел к
более нагретым. Также формулируется
как закон возрастания энтропии. dS≥0
(Неравенство Клаузиуса)
Третье
начало термодинамики говорит о том, как
энтропия ведет себя вблизи абсолютного
нуля температур.
![]()
Обратимый
процесс (то
есть равновесный) —
термодинамический
процесс, который может проходить как в
прямом, так и в обратном направлении,
проходя через одинаковые промежуточные
состояния, причем система возвращается
в исходное состояние без затрат энергии,
и в окружающей среде не остается
макроскопических изменений.
Обратимый
процесс можно в любой момент заставить
протекать в обратном направлении,
изменив какую-либо независимую переменную
на бесконечно малую величину.
Обратимые
процессы дают наибольшую работу. Боìльшую
работу от системы вообще получить
невозможно. Это придает обратимым
процессам теоретическую важность. На
практике обратимый процесс реализовать
невозможно. Он протекает бесконечно
медленно, и можно только приблизиться
к нему.
Необратимым
называется процесс, который нельзя
провести в противоположном направлении
через все те же самые промежуточные
состояния. Все реальные процессы
необратимы. Примеры необратимых
процессов: диффузия, теплопроводность
и др.
Термодинамиìческие
циìклы —
круговые
процессы в термодинамике, то есть такие
процессы, в которых начальные и конечные
параметры, определяющие состояние
рабочего тела (давление, объём, температура,
энтропия) совпадают.
Термодинамические
циклы являются моделями процессов,
происходящих в реальных тепловых машинах
для превращения тепла в механическую
работу. Единственным обратимым циклом
для машины, в которой передача тепла
осуществляется только между рабочим
телом, нагревателем и холодильником,
является Цикл Карно. Существуют также
другие циклы (например, циклы Стирлинга
и Эрикссона), в которых обратимость
достигается путём введения дополнительного
теплового резервуара —
регенератора
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Резона́нс (фр. resonance, от лат. resono — откликаюсь) — явление резкого возрастания амплитуды вынужденных колебаний, которое наступает при приближении частоты внешнего воздействия к некоторым значениям (резонансным частотам), определяемым свойствами системы. При помощи явления резонанса можно выделить и/или усилить даже весьма слабые периодические колебания. Резонанс — явление, заключающееся в том, что при некоторой частоте вынуждающей силы колебательная система оказывается особенно отзывчивой на действие этой силы.
Но это далеко не полное определение явления резонанса. Для более детального восприятия этой категории необходимы некоторые факты из теории дифференциальных уравнений и математического анализа. В теории обыкновенных дифференциальных уравнений известна проблема собственных векторов и собственных значений. Резонанс в динамической системе, описываемой дифференциальными уравнениями (и не только ими), формально наступает, когда проблема собственных значений приводит к кратным собственным числам. При этом в математическом аспекте не очень существенно, являются ли собственные числа комплексными или действительными. В физическом аспекте явление резонанса обычно связывают только с колебательными динамическими системами. Наиболее ярко понятие явления резонанса развито в современной теории динамических систем. Примером является известная теория Колмогорова-Арнольда-Мозера. Центральная проблема этой теории — вопрос сохранения квазипериодического или условно-периодического движения на торе (теорема КАМ). Эта теорема дала мощный толчок к развитию современной теории нелинейных колебаний и волн. В частности, стало ясно, что резонанс может и не наступить, хоть собственные числа совпадают или близки. Напротив, резонанс может проявиться в системе, где никакие собственные числа не совпадают, а удовлетворяют лишь определенным резонансным соотношениям или условиям синхронизма.
Увеличение амплитуды — это лишь следствие резонанса, а причина — совпадение внешней (возбуждающей) частоты с внутренней (собственной) частотой колебательной системы
Содержание
- 1 Механика
- 2 Электроника
- 3 Акустика
- 3.1 Струна
- 4 Примечания
- 5 См. также
- 6 Ссылки
Механика
Наиболее известная большинству людей механическая резонансная система — это обычные качели. Если вы будете подталкивать качели в соответствии с их резонансной частотой, размах движения будет увеличиваться, в противном случае движения будут затухать. Резонансную частоту такого маятника с достаточной точностью в диапазоне малых смещений от равновесного состояния, можно найти по формуле:
 ,
,
 ,
,где g это ускорение свободного падения (9,8 м/с² для поверхности Земли), а L — длина от точки подвешивания маятника до центра его масс. (Более точная формула довольно сложна, и включает эллиптический интеграл). Важно, что резонансная частота не зависит от массы маятника. Также важно, что раскачивать маятник нельзя на кратных частотах (высших гармониках), зато это можно делать на частотах, равных долям от основной (низших гармониках).
Резонансные явления могут вызвать необратимые разрушения в различных механических системах, например, неправильно спроектированных мостах. Так, в 1905 году рухнул Египетский мост в Санкт-Петербурге, когда по нему проходил конный эскадрон, а в 1940 — разрушился Такомский мост в США. Чтобы предотвратить такие повреждения существует правило, заставляющее строй солдат сбивать шаг при прохождении мостов.
В основе работы механических резонаторов лежит преобразование кинетической энергии в потенциальную и обратно. В случае простого маятника, вся его энергия содержится в потенциальной форме, когда он неподвижен и находится в верхних точках траектории, а при прохождении нижней точки на максимальной скорости, она преобразуется в кинетическую. Потенциальная энергия пропорциональна массе маятника и высоте подъёма относительно нижней точки, кинетическая — массе и квадрату скорости в точке измерения.
Другие механические системы могут использовать запас потенциальной энергии в различных формах. Например, пружина запасает энергию сжатия, которая, фактически, является энергией связи её атомов.
Электроника
В электронных устройствах резонанс возникает на определённой частоте, когда индуктивная и ёмкостная составляющие реакции системы уравновешены, что позволяет энергии циркулировать между магнитным полем индуктивного элемента и электрическим полем конденсатора.
Механизм резонанса заключается в том, что магнитное поле индуктивности генерирует электрический ток, заряжающий конденсатор, а разрядка конденсатора создаёт магнитное поле в индуктивности — процесс, который повторяется многократно, по аналогии с механическим маятником.
Электрическое устройство, состоящее из ёмкости и индуктивности, называется колебательным контуром. Элементы колебательного контура могут быть включены как последовательно, так и параллельно. При достижении резонанса, импеданс последовательно соединённых индуктивности и ёмкости минимален, а при параллельном включении — максимален. Резонансные процессы в колебательных контурах используются в элементах настройки, электрических фильтрах. Частота, на которой происходит резонанс, определяется величинами (номиналами) используемых элементов. В то же время, резонанс может быть и вреден, если он возникает в неожиданном месте по причине повреждения, недостаточно качественного проектирования или производства электронного устройства. Такой резонанс может вызывать паразитный шум, искажения сигнала, и даже повреждение компонентов.
Приняв, что в момент резонанса индуктивная и ёмкостная составляющие импеданса равны, резонансную частоту можно найти из выражения ωL = 1/ωC, где ω = 2πf; f — резонансная частота в герцах; L — индуктивность в генри; C — ёмкость в фарадах. Важно, что в реальных системах понятие резонансной частоты неразрывно связано с полосой пропускания, то есть диапазоном частот, в котором реакция системы мало отличается от реакции на резонансной частоте. Ширина полосы пропускания определяется добротностью системы.
Акустика
Резонанс — один из важнейших физических процессов, используемых при проектировании звуковых устройств, большинство из которых содержат резонаторы, например, струны и корпус скрипки, трубка у флейты, мембрана у барабанов.
Струна
Струны таких инструментов, как лютня, гитара, скрипка или пианино, имеют основную резонансную частоту, напрямую зависящую от длины и силы натяжения струны. Длина волны первого резонанса струны равна её удвоенной длине. При этом, его частота зависит от скорости v, с которой волна распространяется по струне:

где L — длина струны (в случае, если она закреплена с обоих концов). Скорость распространения волны по струне зависит от её натяжения T и массы на единицу длины ρ:

Таким образом, частота главного резонанса зависит от свойств струны и выражается следующим отношением:
- ,
 ,
,где T — сила натяжения, ρ — масса единицы длины струны, а m — полная масса струны.
Увеличение натяжения струны и уменьшение её длины увеличивает её резонансную частоту. Помимо основного резонанса, струны также имеют резонансы на высших гармониках основной частоты f, например, 2f, 3f, 4f, и т. д. Если струне придать колебание коротким воздействием (щипком пальцев или ударом молоточка), струна начнёт колебания на всех частотах, присутствующих в воздействующем импульсе (теоретически, короткий импульс содержит все частоты). Однако частоты, не совпадающие с резонансными, быстро затухнут, и мы услышим только гармонические колебания, которые и воспринимаются как музыкальные ноты.
Примечания
См. также
- Диссипативная структура
- Солитон
- Интерференция
- Журавлёв, Виктор Филиппович (см. в кн. «Прикладные методы в теории колебаний» (1988, совместно с Д. М. Климовым))
Ссылки
Richardson LF (1922), Weather prediction by numerical process, Cambridge.
Bretherton FP (1964), Resonant interactions between waves. J. Fluid Mech., 20, 457-472.
Бломберген Н. (1965), Нелинейная оптика, М.: Мир — 424 с.
Захаров В.Е. (1974), Гамильтонов формализм для волн в нелинейных средах с дисперсией, Изв. вузов СССР. Радиофизика, 17(4), 431-453.
Арнольд В.И. (1979), Потеря устойчивости автоколебаний вблизи резонансов, Нелинейные волны, ред. А.В. Гапонов-Грехов, М.: Наука, 116-131.
Kaup PJ, Reiman A and Bers A (1979), Space-time evolution of nonlinear three-wave interactions. Interactions in a homogeneous medium, Rev. of Modern Phys, 51(2), 275-309.
Haken H (1983), Advanced Synergetics. Instability Hierarchies of Self-Organizing Systems and devices, Berlin, Springer-Verlag.
Филлипс O.М. (1984), Взаимодействие волн. Эволюция идей, Современная гидродинамика. Успехи и проблемы. М.: Мир, 297-314.
Журавлёв В.Ф., Климов Д.М. (1988), Прикладные методы в теории колебаний, М.:Наука
Сухоруков А.П. (1988), Нелинейные волновые взаимодействия в оптике и радиофизике, М.: Наука — 232 с.
Брюно А.Д. (1990), Ограниченная задача трех тел, М.:Наука
Wikimedia Foundation.
2010.

Математический маятник — это материальная точка, подвешенная на невесомой и нерастяжимой нити, находящейся в поле тяжести Земли. Математический маятник — это идеализированная модель, правильно описывающая реальный маятник лишь при определенных условиях. Реальный маятник можно считать математическим, если длина нити много больше размеров подвешенного на ней тела, масса нити ничтожна мала по сравнению с массой тела, а деформации нити настолько малы, что ими вообще можно пренебречь.

Колебательную систему в данном случае образуют нить, присоединенное к ней тело и Земля, без которой эта система не могла бы служить маятником. , где ахускорение, g– ускорение свободного падения, х – смещение, l – длина нити маятника.
Это уравнение называется уравнением свободных колебаний математического маятника. Оно правильно описывает рассматриваемые колебания лишь тогда, когда выполнены следующие предположения:
1) будем считать, что силы трения, действующие на тело, пренебрежимо малы и потому, их можно не учитывать; 2) рассматриваются лишь малые колебания маятника с небольшим углом размаха.

Свободные колебания любых систем во всех случаях описываются аналогичными уравнениями. Причинами свободных колебаний математического маятника являются:
1. Действие на маятник силы натяжения и силы тяжести, препятствующей его смещению из положения равновесия и заставляющей его снова опускаться. 2. Инертность маятника, благодаря которой он, сохраняя свою скорость, не останавливается в положении равновесия, а проходит через него дальше.
None Период свободных колебаний математического маятника не зависит от его массы, а определяется лишь длиной нити и ускорением свободного падения в том месте, где находится маятник.
Превращение энергии при гармонических колебаниях
При гармонических колебаниях пружинного маятника происходят превращения потенциальной энергии упруго деформированного телав его кинетическую энергию, гдеkкоэффициент упругости,х – модуль смещения маятника из положения равновесия,m– масса маятника,v– его скорость. В соответствии с уравнением гармонических колебаний:
,.
Полная энергия пружинного маятника: .

Полная энергия для математического маятника:
В случае математического маятника Превращения энергии при колебаниях пружинного маятника происходи в соответствии с законом сохранения механической энергии (). При движении маятника вниз или вверх от положения равновесия его потенциальная энергия увеличивается, а кинетическая – уменьшается. Когда маятник проходит положение равновесия (х = 0), его потенциальная энергия равна нулю и кинетическая энергия маятника имеет наибольшее значение, равное его полной энергии.
Таким образом, в процессе свободных колебаний маятника его потенциальная энергия превращается в кинетическую, кинетическая в потенциальную, потенциальная затем снова в кинетическую и т. д. Но полная механическая энергия при этом остается неизменной.

Вынужденные колебания. Резонанс.
Колебания, происходящие под действием внешней периодической силы, называются вынужденными колебаниями. Внешняя периодическая сила, называемая вынуждающей, сообщает колебательной системе дополнительную энергию, которая идет на восполнение энергетических потерь, происходящих из-за трения. Если вынуждающая сила изменяется во времени по закону синуса или косинуса, то вынужденные колебания будут гармоническими и незатухающими.
В отличие от свободных колебаний, когда система получает энергию лишь один раз (при выведении системы из состояния равновесия), в случае вынужденных колебаний система поглощает эту энергию от источника внешней периодической силы непрерывно. Эта энергия восполняет потери, расходуемые на преодоление трения, и потому полная энергия колебательной системы no-прежнему остается неизменной.
Частота вынужденных колебаний равна частоте вынуждающей силы. В случае, когда частота вынуждающей силы υсовпадает с собственной частотой колебательной системы υ,происходит резкое возрастание амплитуды вынужденных колебаний — резонансРезонанс возникает из-за того, что при υ =υ0 внешняя сила, действуя в такт со свободными колебаниями, все время сонаправлена со скоростью колеблющегося тела и совершает положительную работу: энергия колеблющегося тела увеличивается, и амплитуда его колебаний становится большой. График зависимости амплитуды вынужденных колебаний Атот частоты вынуждающей силы υпредставлен на рисунке, этот график называется резонансной кривой:
Явление резонанса играет большую роль в ряде природных, научных и производственных процессов. Например, необходимо учитывать явление резонанса при проектировании мостов, зданий и других сооружений, испытывающих вибрацию под нагрузкой, в противном случае при определенных условиях эти сооружения могут быть разрушены.
Содержание:

[custom_ads_shortcode1]
Что такое математический маятник (осциллятор)
Представьте себе некую механическую систему, которая состоит из некой материальной точки (тела), которая висит на нерастяжимой невесомой нити (при этом масса нити ничтожно мала по сравнению с массой тела). Вот такая механическая система и является маятником или осциллятором, как его еще называют. Впрочем, могут быть и другие виды такого устройства.
Чем же математический маятник, осциллятор интересен для нас? Дело в том, что с его помощью можно проникнуть в суть многих интересных природных явлений в физике.
[custom_ads_shortcode2]
Колебания математического маятника
Формула периода колебания математического маятника впервые была открыта голландским ученым Гюйгенсом в далеком XVII веке. Будучи современником Исаака Ньютона, Гюйгенс был очень увлечен такими вот маятниками, увлечен настолько, что даже изобрел специальные часы с маятниковым механизмам, и часы эти были одними из самых точных для того времени.
Маятниковые часы Гюйгенса.

Появление подобного изобретения сослужило большую пользу физике, особенно в сфере физических экспериментов, где точное измерение времени является весьма важным фактором. Но вернемся к маятнику, итак, в основе работы маятника лежат его колебания, которые можно выразить формулой, точнее следующим дифференциальным уравнением:
x + w2 sin x = 0Где х (t) – неизвестная функция (это угол отклонения от нижнего положения равновесия в момент t, выраженный в радианах); w – положительная константа, которая определяется из параметров маятника (w = √ g/L, где g – это ускорение свободного падения, а L – длина математического маятника (подвес).
Помимо, собственно колебаний маятник может пребывать и в положении равновесия, при этом сила тяжести, действующая на него, будет уравновешиваться силой натяжения нити. Обычный плоский маятник, пребывающий на нерастяжимой нити, является системой с двумя степенями свободы. Но если, к примеру, нитку заменить на стержень, тогда наш маятник станет системой лишь с одной степенью свободы, так как его движения будут двухмерными, а не трехмерными.

Но если же наш маятник все-таки пребывает на нити и при этом совершает интенсивные колебания вверх-вниз, тогда механическая система приобретает устойчивое положение, именуемое «верх тормашками», еще ее называют маятником Капицы.
[custom_ads_shortcode3]
Свойства маятника
У маятника есть ряд интересных свойств, подтвержденных физическими законами. Так период колебаний всякого маятника зависит от таких факторов, как его размер, форма тела, расстояние между центром тяжести и точкой подвеса. Поэтому определение периода маятника является не простой задачей. А вот период математического маятника можно рассчитать точно по формуле, которая будет приведена ниже.
В ходе наблюдений за маятниками были выведены следующие закономерности:
- Если к маятнику подвешивать разные грузы с разным весом, но при этом сохранять одинаковую длину маятника, то период его колебания будет одинаковым вне зависимости от массы груза.
- Если при запуске колебаний отклонить маятник на не очень большие, но все же разные углы, то он станет колебаться в одинаковым период, но по разным амплитудам. Следовательно, период колебания у подобного маятника не зависит от амплитуды колебания, такое явление было названо изохронизмом, что с древнегреческого можно перевести как «хронос» — время, «изо» — равный, то есть «равновременный».
[custom_ads_shortcode1]
Период математического маятника
Период маятника – показатель, который представляет период собственно колебаний маятника, их длительность. Формулу периода математического маятника можно записать следующим образом. T = 2π √L/gГде L – длина нити математического маятника, g – ускорение свободного падения, а π – число Пи, математическая константа.
Период малых колебания математического маятника никак не зависит от массы маятника и амплитуды колебания, в этой ситуации он двигается как математический маятник с заданной длинной.
[custom_ads_shortcode2]
Практическое применение математического маятника
Вот мы добрались и до самого интересного, зачем нужен математический маятник и какое его применение на практике в жизни. В первую очередь ускорение математического маятника используется для геологоразведки, с его помощью ищут полезные ископаемые. Как это происходит?

Дело в том, что ускорение свободного падения изменяется с географической широтой, так как плотность коры в разных местах нашей планеты далеко не одинакова и там где залегают породы с большей плотностью, ускорение будет немножко больше. А значит, просто подсчитав количество колебаний маятника можно отыскать в недрах Земли руду или каменный уголь, так как они имеют большую плотность, нежели другие рыхлые горные породы.
Также математическим маятником пользовались многие выдающиеся ученые прошлого, начиная с античности, в частности Архимед, Аристотель, Платон, Плутарх. Так Архимед и вовсе использовал математический маятник во всех своих вычислениях, а некоторые люди даже верили, что маятник может влиять на судьбы людей и пытались делать с его помощью предсказания будущего.
[custom_ads_shortcode3]
Математический маятник, видео
И в завершение образовательное видео по теме нашей статьи.

Онлайн калькуляторыНа нашем сайте собрано более 100 бесплатных онлайн калькуляторов по математике, геометрии и физике.
СправочникОсновные формулы, таблицы и теоремы для учащихся. Все что нужно, чтобы сделать домашнее задание!
Заказать решениеНе можете решить контрольную?! Мы поможем! Более 20 000 авторов выполнят вашу работу от 100 руб!

Рис.1. Математический маятник Математический маятник – это модель системы, совершающей гармонические колебания. Свободные колебания математического маятника при малых углах отклонения описываются уравнением гармонических колебаний.
В положении равновесия сила тяжести и сила упругости нити уравновешивают друг друга, и материальная точка находится в покое. При отклонении материальной точки от положения равновесия на малый угол на тело будет действовать возвращающая сила , которая является тангенциальной составляющей силы тяжести:
Эта сила сообщает материальной точке тангенциальное ускорение, направленное по касательной к траектории, и материальная точка начинает двигаться к положению равновесия с возрастающей скоростью. По мере приближения к положению равновесия возвращающая сила, а следовательно, и тангенциальное ускорение точки, уменьшаются. В момент прохождения положения равновесия угол отклонения , тангенциальное ускорение также равно нулю, а скорость материальной точки максимальна. Далее материальная точка проходит по инерции положение равновесия и, двигаясь в направлении, противоположном силе , сбавляет скорость. В крайнем положении материальная точка останавливается, и затем начинает двигаться в обратном направлении.
[custom_ads_shortcode1]
Период колебаний математического маятника
Период колебаний математического маятника не зависит от массы груза и амплитуды колебаний.
[custom_ads_shortcode2]
Примеры решения задач
| Понравился сайт? Расскажи друзьям! |
Математическим маятником называют тело небольших размеров, подвешенное на тонкой нерастяжимой нити, масса которой пренебрежимо мала по сравнению с массой тела. В положении равновесия, когда маятник висит по отвесу, сила тяжести уравновешивается силой натяжения нити . При отклонении маятника из положения равновесия на некоторый угол φ появляется касательная составляющая силы тяжести Fτ = –mg sin φ (рис. 1.2.7). Знак «минус» в этой формуле означает, что касательная составляющая направлена в сторону, противоположную отклонению маятника.
| Рисунок 1.2.7. Математический маятник. φ – угловое отклонение маятника от положения равновесия, x = lφ – смещение маятника по дуге. |
Если обозначить через x линейное смещение маятника от положения равновесия по дуге окружности радиуса l, то его угловое смещение будет равно φ = x / l. Второй закон Ньютона, записанный для проекций векторов ускорения и силы на направление касательной, дает:

Это соотношение показывает, что математический маятник представляет собой сложную нелинейную систему, так как сила, стремящаяся вернуть маятник в положение равновесия, пропорциональна не смещению x, а Только в случае малых колебаний, когда приближенно можно заменить на математический маятник является гармоническим осциллятором, то есть системой, способной совершать гармонические колебания. Практически такое приближение справедливо для углов порядка 15–20°; при этом величина отличается от не более чем на 2 %. Колебания маятника при больших амплитудах не являются гармоническими.
Для малых колебаний математического маятника второй закон Ньютона записывается в виде.
Таким образом, тангенциальное ускорение aτ маятника пропорционально его смещению x, взятому с обратным знаком. Это как раз то условие, при котором система является гармоническим осциллятором. По общему правилу для всех систем, способных совершать свободные гармонические колебания, модуль коэффициента пропорциональности между ускорением и смещением из положения равновесия равен квадрату круговой частоты:
Эта формула выражает собственную частоту малых колебаний математического маятника.
Следовательно,.
Любое тело, насаженное на горизонтальную ось вращения, способно совершать в поле тяготения свободные колебания и, следовательно, также является маятником. Такой маятник принято называть физическим (рис. 1.2.8). Он отличается от математического только распределением масс. В положении устойчивого равновесия центр масс C физического маятника находится ниже оси вращения O на вертикали, проходящей через ось. При отклонении маятника на угол φ возникает момент силы тяжести, стремящийся возвратить маятник в положение равновесия:
Здесь d – расстояние между осью вращения и центром масс C.
| Рисунок 1.2.8. Физический маятник. |
Знак «минус» в этой формуле, как обычно, означает, что момент сил стремится повернуть маятник в направлении, противоположном его отклонению из положения равновесия. Как и в случае математического маятника, возвращающий момент M пропорционален sin φ. Это означает, что только при малых углах φ, когда sin φ ≈ φ, физический маятник способен совершать свободные гармонические колебания. В случае малых колебанийи второй закон Ньютона для физического маятника принимает видгде ε – угловое ускорение маятника, I – момент инерции маятника относительно оси вращения O. Модуль коэффициента пропорциональности между ускорением и смещением равен квадрату круговой частоты:
Здесь ω0 – собственная частота малых колебаний физического маятника.
Следовательно,.
Более строгий вывод формул для ω0 и T можно сделать, если принять во внимание математическую связь между угловым ускорением и угловым смещением: угловое ускорение ε есть вторая производная углового смещения φ по времени:
Поэтому уравнение, выражающее второй закон Ньютона для физического маятника, можно записать в виде.
Это уравнение свободных гармонических колебаний. Коэффициент в этом уравнении имеет смысл квадрата круговой частоты свободных гармонических колебаний физического маятника.
По теореме о параллельном переносе оси вращения (теорема Штейнера,) момент инерции I можно выразить через момент инерции IC относительно оси, проходящей через центр масс C маятника и параллельной оси вращения:
Окончательно для круговой частоты ω свободных колебаний физического маятника получается выражение:
Не нашли то, что искали? Воспользуйтесь поиском:
Источники:
- studfiles.net
- www.poznavayka.org
- ru.solverbook.com
- studopedia.ru