Механические колебания.
-
Гармонические колебания.
-
Уравнение гармонических колебаний.
-
Пружинный маятник.
-
Математический маятник.
-
Свободные и вынужденные колебания.
Автор — профессиональный репетитор, автор учебных пособий для подготовки к ЕГЭ Игорь Вячеславович Яковлев
Темы кодификатора ЕГЭ : гармонические колебания; амплитуда, период, частота, фаза колебаний; свободные колебания, вынужденные колебания, резонанс.
Колебания — это повторяющиеся во времени изменения состояния системы. Понятие колебаний охватывает очень широкий круг явлений.
Колебания механических систем, или механические колебания — это механическое движение тела или системы тел, которое обладает повторяемостью во времени и происходит в окрестности положения равновесия. Положением равновесия называется такое состояние системы, в котором она может оставаться сколь угодно долго, не испытывая внешних воздействий.
Например, если маятник отклонить и отпустить, то начнутся колебания. Положение равновесия — это положение маятника при отсутствии отклонения. В этом положении маятник, если его не трогать, может пребывать сколь угодно долго. При колебаниях маятник много раз проходит положение равновесия.
Сразу после того, как отклонённый маятник отпустили, он начал двигаться, прошёл положение равновесия, достиг противоположного крайнего положения, на мгновение остановился в нём, двинулся в обратном направлении, снова прошёл положение равновесия и вернулся назад. Совершилось одно полное колебание. Дальше этот процесс будет периодически повторяться.
Амплитуда колебаний тела — это величина его наибольшего отклонения от положения равновесия.
Период колебаний  — это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
— это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
Частота колебаний  — это величина, обратная периоду:
— это величина, обратная периоду:  . Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
. Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
к оглавлению ▴
Гармонические колебания.
Будем считать, что положение колеблющегося тела определяется одной-единственной координатой  . Положению равновесия отвечает значение
. Положению равновесия отвечает значение  . Основная задача механики в данном случае состоит в нахождении функции
. Основная задача механики в данном случае состоит в нахождении функции ") , дающей координату тела в любой момент времени.
, дающей координату тела в любой момент времени.
Для математического описания колебаний естественно использовать периодические функции. Таких функций много, но две из них — синус и косинус — являются самыми важными. У них много хороших свойств, и они тесно связаны с широким кругом физических явлений.
Поскольку функции синус и косинус получаются друг из друга сдвигом аргумента на  , можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
, можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
Гармонические колебания — это колебания, при которых координата зависит от времени по гармоническому закону:
") (1)
(1)
Выясним смысл входящих в эту формулу величин.
Положительная величина  является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому — амплитуда колебаний.
является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому — амплитуда колебаний.
Аргумент косинуса  называется фазой колебаний. Величина
называется фазой колебаний. Величина  , равная значению фазы при
, равная значению фазы при  , называется начальной фазой. Начальная фаза отвечает начальной координате тела:
, называется начальной фазой. Начальная фаза отвечает начальной координате тела:  .
.
Величина называется  циклической частотой. Найдём её связь с периодом колебаний и частотой
циклической частотой. Найдём её связь с периодом колебаний и частотой  . Одному полному колебанию отвечает приращение фазы, равное
. Одному полному колебанию отвечает приращение фазы, равное  радиан:
радиан:  , откуда
, откуда
 (2)
(2)
 (3)
(3)
Измеряется циклическая частота в рад/с (радиан в секунду).
В соответствии с выражениями (2) и (3) получаем ещё две формы записи гармонического закона (1):
, x=Acos(2 pi nu t + alpha)") .
.
График функции (1), выражающей зависимость координаты от времени при гармонических колебаниях, приведён на рис. 1.
 |
| Рис. 1. График гармонических колебаний |
Гармонический закон вида (1) носит самый общий характер. Он отвечает, например, ситуации, когда с маятником совершили одновременно два начальных действия: отклонили на величину  и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
Пусть маятник отклонили, но начальной скорости не сообщали (отпустили без начальной скорости). Ясно, что в этом случае  , поэтому можно положить
, поэтому можно положить  . Мы получаем закон косинуса:
. Мы получаем закон косинуса:
 .
.
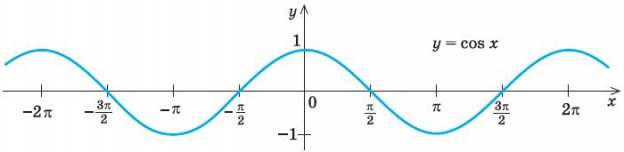
График гармонических колебаний в этом случае представлен на рис. 2.
 |
| Рис. 2. Закон косинуса |
Допустим теперь, что маятник не отклоняли, но ударом сообщили ему начальную скорость из положения равновесия. В этом случае  , так что можно положить
, так что можно положить  . Получаем закон синуса:
. Получаем закон синуса:
 .
.
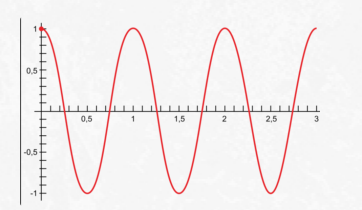
График колебаний представлен на рис. 3.
 |
| Рис. 3. Закон синуса |
к оглавлению ▴
Уравнение гармонических колебаний.
Вернёмся к общему гармоническому закону (1). Дифференцируем это равенство:
") . (4)
. (4)
Теперь дифференцируем полученное равенство (4):
") . (5)
. (5)
Давайте сопоставим выражение (1) для координаты и выражение (5) для проекции ускорения. Мы видим, что проекция ускорения отличается от координаты лишь множителем  :
:
 . (6)
. (6)
Это соотношение называется уравнением гармонических колебаний. Его можно переписать и в таком виде:
 . (7)
. (7)
C математической точки зрения уравнение (7) является дифференциальным уравнением. Решениями дифференциальных уравнений служат функции (а не числа, как в обычной алгебре).
Так вот, можно доказать, что:
-решением уравнения (7) является всякая функция вида (1) с произвольными  ;
;
-никакая другая функция решением данного уравнения не является.
Иными словами, соотношения (6), (7) описывают гармонические колебания с циклической частотой  и только их. Две константы определяются из начальных условий — по начальным значениям координаты и скорости.
и только их. Две константы определяются из начальных условий — по начальным значениям координаты и скорости.
к оглавлению ▴
Пружинный маятник.
Пружинный маятник — это закреплённый на пружине груз, способный совершать колебания в горизонтальном или вертикальном направлении.
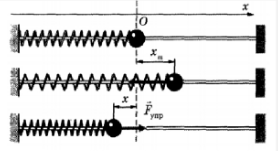
Найдём период малых горизонтальных колебаний пружинного маятника (рис. 4). Колебания будут малыми, если величина деформации пружины много меньше её размеров. При малых деформациях мы можем пользоваться законом Гука. Это приведёт к тому, что колебания окажутся гармоническими.
Трением пренебрегаем. Груз имеет массу  , жёсткость пружины равна
, жёсткость пружины равна  .
.
Координате отвечает положение равновесия, в котором пружина не деформирована. Следовательно, величина деформации пружины равна модулю координаты груза.
 |
| Рис. 4. Пружинный маятник |
В горизонтальном направлении на груз действует только сила упругости  со стороны пружины. Второй закон Ньютона для груза в проекции на ось
со стороны пружины. Второй закон Ньютона для груза в проекции на ось  имеет вид:
имеет вид:
 . (8)
. (8)
Если  (груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и
(груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и  . Наоборот, если
. Наоборот, если  , то
, то  . Знаки и
. Знаки и  всё время противоположны, поэтому закон Гука можно записать так:
всё время противоположны, поэтому закон Гука можно записать так:

Тогда соотношение (8) принимает вид:

или
 .
.
Мы получили уравнение гармонических колебаний вида (6), в котором
 .
.
Циклическая частота колебаний пружинного маятника, таким образом, равна:
 . (9)
. (9)
Отсюда и из соотношения  находим период горизонтальных колебаний пружинного маятника:
находим период горизонтальных колебаний пружинного маятника:
 . (10)
. (10)
Если подвесить груз на пружине, то получится пружинный маятник, совершающий колебания в вертикальном направлении. Можно показать, что и в этом случае для периода колебаний справедлива формула (10).
к оглавлению ▴
Математический маятник.
Математический маятник — это небольшое тело, подвешенное на невесомой нерастяжимой нити (рис. 5). Математический маятник может совершать колебания в вертикальной плоскости в поле силы тяжести.
 |
| Рис. 5. Математический маятник |
Найдём период малых колебаний математического маятника. Длина нити равна  . Сопротивлением воздуха пренебрегаем.
. Сопротивлением воздуха пренебрегаем.
Запишем для маятника второй закон Ньютона:
 ,
,
и спроектируем его на ось :
 .
.
Если маятник занимает положение как на рисунке (т. е. ), то:
 .
.
Если же маятник находится по другую сторону от положения равновесия (т. е. ), то:
 .
.
Итак, при любом положении маятника имеем:
 . (11)
. (11)
Когда маятник покоится в положении равновесия, выполнено равенство  . При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство
. При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство  . Воспользуемся им в формуле (11):
. Воспользуемся им в формуле (11):
 ,
,
или
 .
.
Это — уравнение гармонических колебаний вида (6), в котором
 .
.
Следовательно, циклическая частота колебаний математического маятника равна:
 . (12)
. (12)
Отсюда период колебаний математического маятника:
 . (13)
. (13)
Обратите внимание, что в формулу (13) не входит масса груза. В отличие от пружинного маятника, период колебаний математического маятника не зависит от его массы.
к оглавлению ▴
Свободные и вынужденные колебания.
Говорят, что система совершает свободные колебания, если она однократно выведена из положения равновесия и в дальнейшем предоставлена сама себе. Никаких периодических внешних
воздействий система при этом не испытывает, и никаких внутренних источников энергии, поддерживающих колебания, в системе нет.
Рассмотренные выше колебания пружинного и математического маятников являются примерами свободных колебаний.
Частота, с которой совершаются свободные колебания, называется собственной частотой колебательной системы. Так, формулы (9) и (12) дают собственные (циклические) частоты колебаний пружинного и математического маятников.
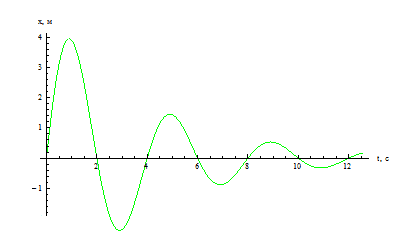
В идеализированной ситуации при отсутствии трения свободные колебания являются незатухающими, т. е. имеют постоянную амплитуду и длятся неограниченно долго. В реальных колебательных системах всегда присутствует трение, поэтому свободные колебания постепенно затухают (рис. 6).
 |
| Рис. 6. Затухающие колебания |
Вынужденные колебания — это колебания, совершаемые системой под воздействием внешней силы ") , периодически изменяющейся во времени (так называемой вынуждающей силы).
, периодически изменяющейся во времени (так называемой вынуждающей силы).
Предположим, что собственная частота колебаний системы равна  , а вынуждающая сила зависит от времени по гармоническому закону:
, а вынуждающая сила зависит от времени по гармоническому закону:
=F_{0}cos omega t") .
.
В течение некоторого времени происходит установление вынужденных колебаний: система совершает сложное движение, которое является наложением выужденных и свободных колебаний. Свободные колебания постепенно затухают, и в установившемся режиме система совершает вынужденные колебания, которые также оказываются гармоническими. Частота установившихся вынужденных колебаний совпадает с частотой
вынуждающей силы (внешняя сила как бы навязывает системе свою частоту).
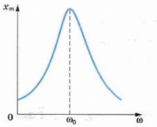
Амплитуда установившихся вынужденных колебаний зависит от частоты вынуждающей силы. График этой зависимости показан на рис. 7.
 |
| Рис. 7. Резонанс |
Мы видим, что вблизи частоты  наступает резонанс — явление возрастания амплитуды вынужденных колебаний. Резонансная частота приближённо равна собственной частоте колебаний системы:
наступает резонанс — явление возрастания амплитуды вынужденных колебаний. Резонансная частота приближённо равна собственной частоте колебаний системы:  , и это равенство выполняется тем точнее, чем меньше трение в системе. При отсутствии трения резонансная частота совпадает с собственной частотой колебаний,
, и это равенство выполняется тем точнее, чем меньше трение в системе. При отсутствии трения резонансная частота совпадает с собственной частотой колебаний,  , а амплитуда колебаний возрастает до бесконечности при
, а амплитуда колебаний возрастает до бесконечности при  .
.
Благодарим за то, что пользуйтесь нашими материалами.
Информация на странице «Механические колебания.» подготовлена нашими редакторами специально, чтобы помочь вам в освоении предмета и подготовке к экзаменам.
Чтобы успешно сдать нужные и поступить в высшее учебное заведение или колледж нужно использовать все инструменты: учеба, контрольные, олимпиады, онлайн-лекции, видеоуроки, сборники заданий.
Также вы можете воспользоваться другими статьями из разделов нашего сайта.
Публикация обновлена:
08.05.2023
T
x
 τ
τ 
Рис.12
Итак, уравнение движения точки принимает вид
|
x = 2 |
h |
sin( |
p −k |
t) cos pt. |
|
|
k 2 |
− p2 |
||||
|
2 |
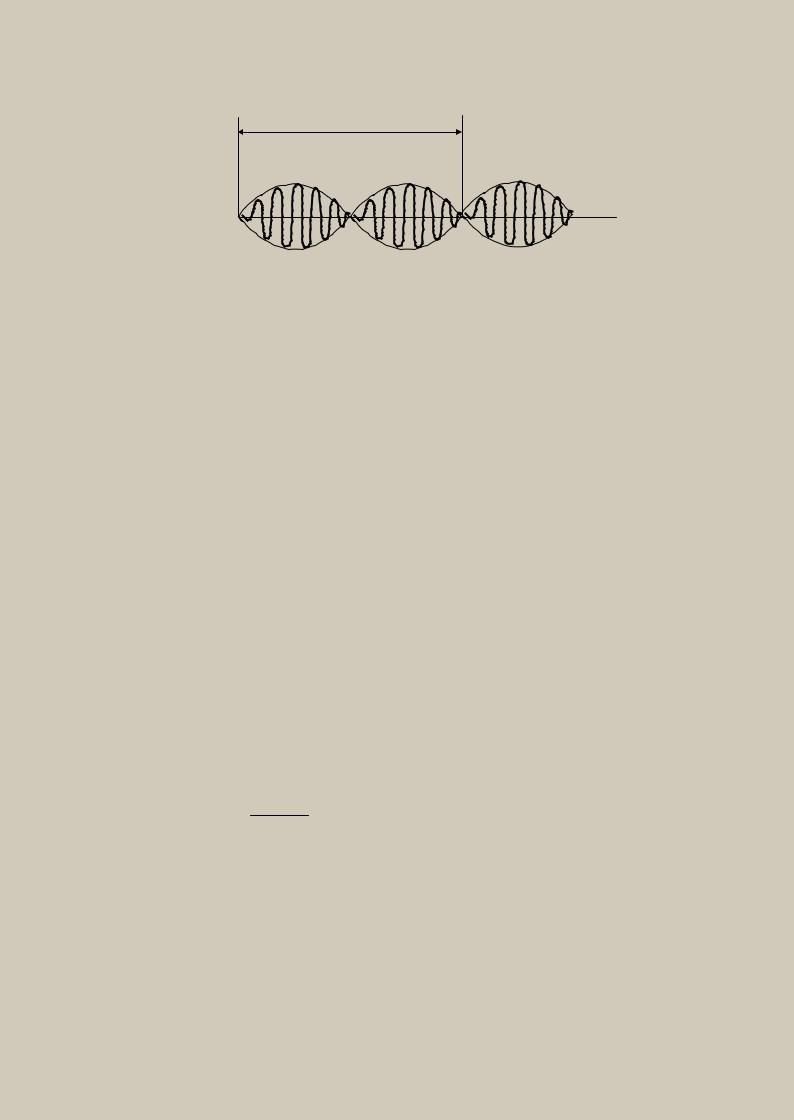
Движение, соответствующее этому уравнению, представляет собой колебания, происходящие с частотой возмущающей силы р. Период этих коле-
|
баний равен τ = |
2π |
, амплитуда колебаний, равная 2 |
h |
sin( |
p −k |
t) , ме- |
|||||
|
k |
2 |
2 |
|||||||||
|
р |
− p |
2 |
|||||||||
|
няется по периодическому закону, частота изменения амплитуды равна |
|||||||||||
|
p −k |
, а период ее изменения TА = |
4π |
. Таким образом, для |
р ≈ k период |
|||||||
|
2 |
p −k |
||||||||||
изменения амплитуды ТА значительно превышает период колебаний τ. Такое движение называется биениями, график этого движения показан на рис. 12.
3.2. Вынужденные колебания: коэффициент динамичности
Подробно исследуем вынужденные колебания, описываемые уравнени-
ем (28):
x2 = k 2 −h p2 sin pt.
|
Амплитуда вынужденных колебаний |
A = |
h |
зависит от частоты |
||||||
|
k |
2 |
− p |
2 |
||||||
возмущающей силы р и частоты собственных колебаний k. Обозначим z = p/k, величина z называется коэффициентом расстройки.
Исследуем зависимость амплитуды вынужденных колебаний от коэффициента расстройки z = p/k.
Преобразуем выражение, полученное для амплитуды:
|
A = |
h |
= |
H |
= |
xст |
, |
||||||||||||||||||
|
k |
2 |
− p |
2 |
c |
1 |
− |
p |
2 |
1 |
− z |
2 |
|||||||||||||
|
k |
2 |
|||||||||||||||||||||||
где xст = H / c — величина статического отклонения точки под действием
постоянной силы Н.
Определим отношение амплитуды вынужденных колебаний к величине статического отклонения точки, называемое μ
коэффициентом динамичности:
|
μ = |
A |
= |
1 |
|||||
|
1 − z 2 |
||||||||
|
xст |
||||||||
|
Коэффициент динамичности показыва- |
1 |
|||||||
|
ет, во сколько раз амплитуда вынужденных |
||||||||
|
колебаний превышает статическое отклоне- |
||||||||
|
ние точки. Построим график зависимости ко- |
0 |
|||||||
|
1 |
z |
|||||||
|
эффициента динамичности от коэффициента |
Рис. 13 |
|||||||
|
расстройки z=p/k. |
Из графика (рис.13) сле- |
дует, что при p→ k коэффициент динамич-
ности резко возрастает, следовательно, возрастает амплитуда колебаний. При р<<k амплитуда незначительно отличается от хст , при р>>k амплитуда становится очень малой.
3.3. Резонанс
Рассмотрим движение точки в том случае, когда частота возмущающей силы равна частоте собственных колебаний, т.е. при p = k.
Явление совпадения частот возмущающей силы и собственных колебаний называется резонансом.
Дифференциальное уравнение (21) движения точки под действием восстанавливающей и возмущающей сил имеет вид
|
&& |
+k |
2 |
x = hsin pt |
(21) |
|
x |
Частное решение этого уравнения при резонансе (k = p) следует искать в виде:
x2 = At sin( pt +γ) .
Для определения постоянных А и γ вычислим сначала вторую производную &x&2 .
|
& |
= Asin( pt +γ) + Atpcos( pt +γ) , |
|||
|
x2 |
||||
|
&& |
= 2Apcos( pt +γ) − Atp |
2 |
sin( pt +γ) . |
|
|
x2 |
||||
|
Подставим значения х |
&& |
|||
|
и x в уравнение (3.21): |
||||
|
2 Ap cos( pt +γ ) − Atp 2 sin( pt +γ ) + Atk 2 sin( pt +γ ) = h sin pt . |
||||
|
Здесь p = k, значит |
||||
|
2 Ap cos( pt +γ) = h sin pt , |
х |
|||
|
или |
ht |
|||
|
x= 2 p |
||||
|
2 Ap cos pt cosγ −2 Ap sin pt sin γ = hsin pt . |
||||
|
Это равенство удовлетворяется то- |
О |
t |
||
|
ждественно, если равны коэффициенты, |
ht |
|||
|
стоящие перед одинаковыми тригоно- |
||||
|
метрическими функциями в левой и |
x= — 2 p |
|||
|
правой его частях: |
|
−2 Ap sin γ = h, 2 Ap cosγ = 0 . |
Рис.14 |
|||
|
Отсюда, принимая, что А > 0, получаем |
A = |
h |
γ = — π⁄2. |
|
|
2 p |
||||
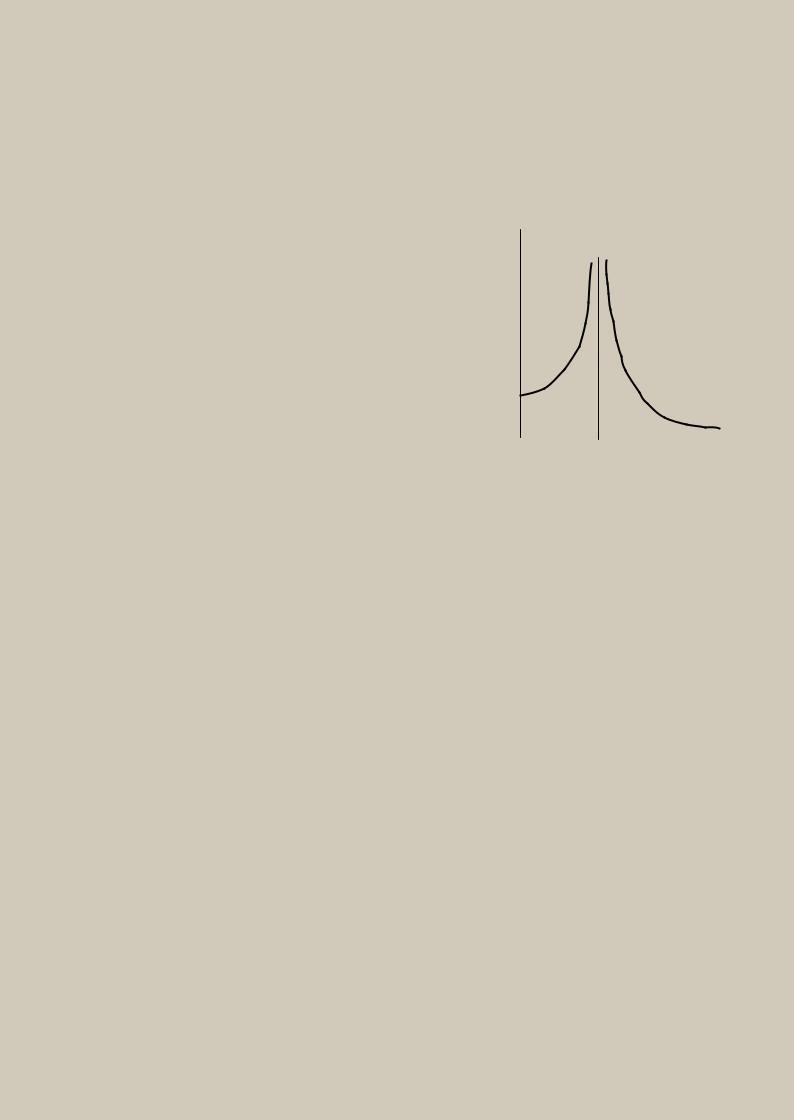
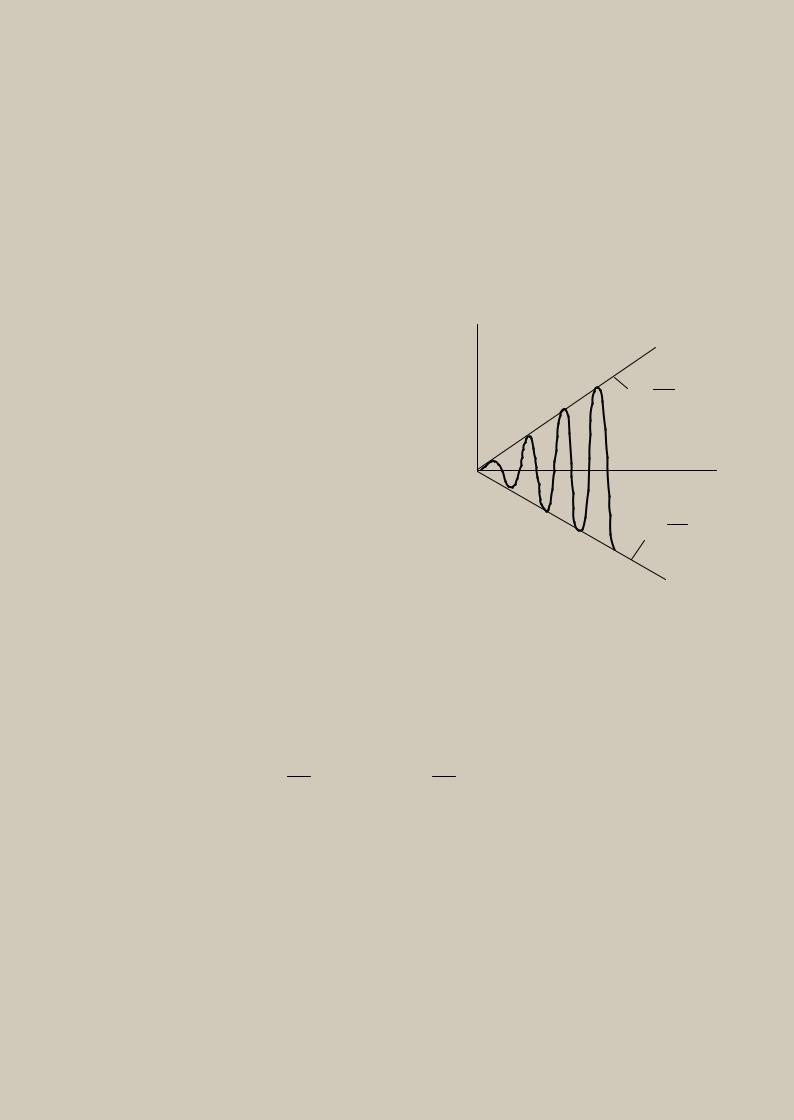
Окончательно уравнение вынужденных колебаний при резонансе принимает вид
x2 = 2hp t sin( pt −π2 ) = −2hp t cos pt .
Как следует из этого уравнения амплитуда вынужденных колебаний, с течением времени неограниченно возрастает, причем рост амплитуды пропорционален времени (рис.14). Частота и период вынужденных колебаний при резонансе равны частоте периода свободных гармонических колебаний, а фаза колебаний по отношению к фазе возмущающей силы отстает на π/2.
3.4. Вынужденные колебания с учетом силы сопротивления
Рассмотрим прямолинейное движение материальной точки, на которую действуют три силы: восстанавливающая сила, сила сопротивления, проек-
ции которых на ось х равны Fx = −cx , Rx = −μVx = −μ dxdt , и возмущающая
сила, изменяющаяся по гармоническому закону Рх = H sin pt . Дифференциальное уравнение движения точки имеет вид
|
m |
d 2 x |
= −cx |
− μ |
dx |
+ H sin pt |
|||||||||||||
|
d 2 x |
dt 2 |
dt |
||||||||||||||||
|
dx |
||||||||||||||||||
|
Заменим |
&& |
& |
2n = |
μ |
, k |
2 |
= |
c |
, |
h = |
H |
, получим |
||||||
|
dt |
2 |
= x, |
= x , обозначим |
m |
m |
m |
||||||||||||
|
dt |
2 |
|||||||||||||||||
|
&& |
& |
x = hsin pt , |
(33) |
|||||||||||||||
|
x |
+2nx +k |
Уравнение (33) является неоднородным линейным уравнением, его решение дается формулой х = х1 + х2 , в которой х1 – общее решение од-
|
&& |
& |
2 |
x = 0 , |
х2 – частное |
|
нородного дифференциального уравнения x + 2nx + k |
||||
|
решение уравнения (33). |
||||
|
При k > n общее решение однородного уравнения |
||||
|
x1 = e−nt (C1 cos k 2 −n2 t +C2 sin |
k 2 −n2 t) |
(34) |
представляет собой уравнение затухающих колебаний.
|
Частное решение уравнения (33) находим в форме правой части: |
|
|
x2 = Asin( pt +γ) |
(35) |
Уравнение (35) является уравнением вынужденных колебаний материальной точки, происходящих с частотой возмущающей силы р. Определим амплитуду А и начальную фазу γ вынужденных колебаний, для чего найдем первую и вторую производные от х2 по времени и подставим их значения в уравнение (33):
|
& |
= pAcos( pt +γ) , |
&& |
= −p |
2 |
Asin( pt +γ) . |
|
|
x2 |
x2 |
|||||
|
− p2 Asin(pt +γ) +2n pAcos(pt +γ) +k 2 Asin(pt +γ) = hsin pt . |
(36) |
Положим pt +γ =ϕ , тогда pt =ϕ −γ , следовательно,
sin pt = sin(ϕ −γ ) = sin ϕ cos γ − cos ϕ sin γ .
Подставим новые переменные в уравнение (36):
![]()
− p2 Asinϕ +2n pAcosϕ +k 2 Asinϕ = hsinϕсosγ −hcosϕsinγ
или
A(k 2 − p2 )sinϕ +2n pAcosϕ = hsinϕсosγ −hcosϕsinγ .
Приравняем коэффициенты, стоящие в левой и правой частях уравнения (36), при одинаковых тригонометрических функциях:
A(k 2 − p2 ) = h cosγ ,
2Anp = −h sin γ .
Возведем в квадрат каждое из этих уравнений и сложим их:
A2 (k 2 − p2 )2 +4A2 p2 n2 = h .
Отсюда
|
A = |
h |
. |
(37) |
|||
|
(k 2 − p2 )2 −4n2 p2 |
||||||
|
Разделив второе уравнение на первое, получим |
||||||
|
tgγ |
= |
2np |
. |
(38) |
||
|
k 2 − p 2 |
||||||
|
Тогда |
h |
|||||
|
х2 |
= |
sin( pt +γ) |
(39) |
|||
|
− p2 )2 + |
||||||
|
(k 2 |
4n2 p2 |
Теперь общее решение х =х1+х2 дифференциального уравнения (3.33) можно записать в виде
|
x = |
e−nt (C cos |
k 2 −n2 t +C |
sin k 2 |
−n2 t) + |
h |
sin( pt +γ) . |
|
|
2 |
|||||||
|
1 |
(k 2 |
− p2 )2 +4n2 p2 |
|||||
(40)
Таким образом, движение материальной точки, как следует из уравнения
(40), складывается из затухающих колебаний с частотой kC =  k 2 −n2 и
k 2 −n2 и
вынужденных колебаний с частотой возмущающей силы p. Первое движение со временем затухает, и основным движением остаются вынужденные колебания с частотой р и начальной фазой γ.
Установим зависимость амплитуды вынужденных колебаний от коэффициента расстройки z = kp . Разделим на k2 числитель и знаменатель формулы (3.37), определяющей значение амплитуды:
|
h |
|||||||||||||||||||||||||||||||||||||
|
A = |
k 2 |
p2 . |
(41) |
||||||||||||||||||||||||||||||||||
|
p |
2 |
n2 |
|||||||||||||||||||||||||||||||||||
|
(1 − |
) + |
4 |
|||||||||||||||||||||||||||||||||||
|
k |
2 |
k 2 |
k 2 |
||||||||||||||||||||||||||||||||||
|
h = |
H |
, k 2 |
= |
c |
, |
тогда числитель выражения (41) приводится к виду: |
|||||||||||||||||||||||||||||||
|
m |
m |
||||||||||||||||||||||||||||||||||||
|
h |
= |
H |
= |
H m |
= |
H |
= xст . |
||||||||||||||||||||||||||||||
|
2 |
m k |
2 |
c |
||||||||||||||||||||||||||||||||||
|
k |
m c |
||||||||||||||||||||||||||||||||||||
|
Заменим |
p |
= z |
, |
h |
= хст , |
n |
= β , тогда |
A = |
xст |
. |
|||||||||||||||||||||||||||
|
k |
k |
2 |
k |
(1 − z 2 ) +4β2 z 2 |
|||||||||||||||||||||||||||||||||
Определим отношение амплитуды вынужденных колебаний к величине статического перемещения, которое называется динамическим коэффици-
ентом μ:
|
A |
1 |
1 |
||||||||||
|
μ = |
= |
= |
(1 − z 2 )2 + 4β2 z 2 . |
(42) |
||||||||
|
xст |
p2 |
2 |
n2 |
p2 |
||||||||
|
(1 − |
) |
+ 4 |
||||||||||
|
k 2 |
k 2 |
k 2 |
||||||||||
|
Исследуем характер изменения μ |
в зависимости от z при конкретном |
|||||||||||
|
значении β, и построим |
соответствующие графики (рис.15). Как следует из |
|||||||||||
|
графика при малых значениях |
z ( p>> k) величина μ =1, и амплитуда вынуж- |
|||||||||||
|
денных колебаний практически равна статическому отклонению |
А= хст. |
При z = 1 (p = k) величина μ имеет максимум, при этом чем меньше сопротивление, тем сильнее возрастает амплитуда.
μ
4
3
Линия максимумов
2
1
Рис. 15
Итак, движение материальной точки, на которую действуют восстанавливающая сила, сила сопротивления, пропорциональная скорости, и возмущающая сила, представляет собой наложение вынужденных колебаний на затухающие. Затухающие колебания с течением времени прекращаются. При установившемся режиме через достаточно большой промежуток времени останутся только

вынужденные колебания, определяемые уравнением
|
х2 |
= |
h |
sin( pt +γ) . |
|
|
− p2 )2 |
||||
|
(k 2 |
+4n2 p2 |
Уравнение показывает, что вынужденные колебания материальной точки при наличии силы сопротивления, пропорциональной скорости, являются гармоническими, так как амплитуда их с течением времени не изменяется, т.е. вынужденные колебания не затухают. Этим вынужденные колебания существенно отличаются от свободных колебаний, которые затухают даже при незначительном сопротивлении. Частота и период вынужденных колебаний при наличии сопротивления равны частоте и периоду изменения возмущающей силы, т.е. сила сопротивления не влияет на частоту и период вынужденных колебаний.
Контрольные вопросы по теме «Колебания материальной точки»
1.Какая сила называется восстанавливающей?
2.Записать дифференциальное уравнение движение точки под действием восстанавливающей силы.
3.Какое движение совершает точка под действием восстанавливающей силы?
4.Записать уравнение свободных гармонических колебаний.
5.Начертить график свободных гармонических колебаний.
6.Что называется амплитудой свободных гармонических колебаний?
7.Что называется начальной фазой гармонических колебаний?
8.Чему равна частота гармонических колебаний?
9.Что называется периодом гармонических колебаний?
10.Какие из перечисленных величин зависят от начальных условий: амплитуда, начальная фаза, частота, период гармонических колебаний?
11.Под действием каких сил точка совершает затухающие колебания? 12.Начертите график затухающих колебаний.
13.Записать дифференциальное уравнение затухающих колебаний.
14.Записать уравнение движения точки при затухающих колебаниях.
15.Что называется амплитудой затухающих колебаний?
16.Чему равен период затухающих колебаний?
17.Сравните период гармонических колебаний с периодом затухающих колебаний.
18.Что называется декрементом колебаний?

19.Как движется точка под действием восстанавливающей силы в случае большого сопротивления?
20.Какое движение называется апериодическим?
21.Под действием каких сил точка совершает вынужденные колебания? 22.Что называется восстанавливающей силой?
23.Записать дифференциальные уравнения вынужденных колебаний без учета сил сопротивления.
24. Записать уравнение вынужденных колебаний.
25.С какой частотой происходят вынужденные колебания точки?
26.Что называется резонансом?
27.Начертите график изменения амплитуды для вынужденных колебаний при отсутствии сил сопротивления.
28.Как влияет на резонанс сила сопротивления?
29.Что называется биениями?
30.Под действием каких сил и при каких начальных условиях возникают биения?
31. Нарисуйте график биений.
Соседние файлы в папке Термех
- #
08.06.201578 б18Desktop.ini
- #
- #
- #
- #
- #
- #
- #
- #
Содержание материала
- Примеры движения
- Видео
- Резонанс
- Пружинный маятник
- Амплитуда и фаза колебаний
- Что такое начальная фаза и как определить ее по графику колебаний
- Как вычислить начальный угол по интервалу смещения
- Математический маятник
- Частные случаи формул для вычисления циклической частоты
- Круговая частота
- Характеристики колебаний
- Уравнение гармонических колебаний
- Как связаны характеристики колебаний формулы
Примеры движения
Колебательное движение является одним из наиболее распространенных в природе. Например, можно представить себе струны музыкальных инструментов, качели или голосовые связки человека.
В физике колебаниями называются процессы, которые повторяются через равные промежутки времени. Подобные движения рассматривается посредством нескольких моделей:
- тела, подвешенного на пружине (двигающееся по направлению вверх-вниз);
- груза на нитке;
- электрического контура и других.
Видео
Резонанс
Резонанс – явление резкого возрастания амплитуды колебаний, которое происходит при совпадении частоты вынуждающей силы и собственной частоты колебаний тела.
Условие резонанса:

( v_0 ) – собственная частота колебаний маятника.
На рисунке изображены резонансные кривые для сред с разным трением. Чем меньше трение, тем выше и острее резонансная кривая.

Явление резонанса учитывается при периодически изменяющихся нагрузках в машинах и различных сооружениях. Также резонанс используется в акустике, радиотехнике и т. д.
Пружинный маятник
Пружинный маятник — это груз, прикрепленный к пружине, массой которой можно пренебречь.
В пружинном маятнике колебания совершаются под действием силы упругости. Пока пружина не деформирована, сила упругости на тело не действует.
Амплитуда и фаза колебаний
Амплитуда колебаний – модуль наибольшего смещения тела от положения равновесия. Обозначение – ( A, (X_{max}) ), единицы измерения – м.
Фаза колебаний – это величина, которая определяет состояние колебательной системы в любой момент времени. Обозначение – ( varphi ), единицы измерения – рад (радиан).

Фаза колебаний – это величина, стоящая под знаком синуса или косинуса. Она показывает, какая часть периода прошла от начала колебаний. Фаза гармонических колебаний в процессе колебаний изменяется. ( varphi_0 ) – начальная фаза колебаний. Начальная фаза колебаний – величина, которая определяет положение тела в начальный момент времени.
Важно! Путь, пройденный телом за одно полное колебание, равен четырем амплитудам.
Что такое начальная фаза и как определить ее по графику колебаний
Отклоним качели на некоторый угол от равновесия и будем удерживать их в таком положении. Когда мы отпустим их, качели начнут раскачиваться. А старт колебаний произойдет из угла, на который мы их отклонили.
Такой, начальный угол отклонения, называют начальной фазой колебаний. Обозначим этот угол (рис. 7) какой-нибудь греческой буквой, например, (large varphi_{0} ).
(large varphi_{0} left(text{рад} right) ) — начальная фаза, измеряется в радианах (или градусах).
Начальная фаза колебаний – это угол, на который мы отклонили качели, перед тем, как их отпустить. Из этого угла начнется колебательный процесс.

Рис. 7. Угол отклонения качелей перед началом колебаний
Рассмотрим теперь, как величина (large varphi_{0} ) влияет на график колебаний (рис. 8). Для удобства будем считать, что мы рассматриваем колебания, которые происходят по закону синуса.
Кривая, обозначенная черным на рисунке, начинает период колебаний из точки t = 0. Эта кривая является «чистым», не сдвинутым синусом. Для нее величину начальной фазы (large varphi_{0} ) принимаем равной нулю.

Рис. 8. Вертикальное положение стартовой точки в момент времени t = 0 и сдвиг графика по горизонтали определяется начальной фазой
Вторая кривая на рисунке обозначена красным цветом. Начало ее периода сдвинуто вправо относительно точки t = 0. Поэтому, для красной кривой, начавшей новый период колебаний спустя время (large Delta t), начальный угол (large varphi_{0} ) будет отличаться от нулевого значения.
Определим угол (large varphi_{0} ) с помощью графика колебаний.
Обратим внимание (рис.  на то, что время, лежащее на горизонтальной оси, измеряется в секундах, а величина (large varphi_{0} ) — в радианах. Значит, нужно связать формулой кусочек времени (large Delta t) и соответствующий ему начальный угол (large varphi_{0} ).
на то, что время, лежащее на горизонтальной оси, измеряется в секундах, а величина (large varphi_{0} ) — в радианах. Значит, нужно связать формулой кусочек времени (large Delta t) и соответствующий ему начальный угол (large varphi_{0} ).
Как вычислить начальный угол по интервалу смещения
Алгоритм нахождения начального угла состоит из нескольких несложных шагов.
- Сначала определим интервал времени, обозначенный синими стрелками на рисунке. На осях большинства графиков располагают цифры, по которым это можно сделать. Как видно из рис. 8, этот интервал (large Delta t) равен 1 сек.
- Затем определим период. Для этого отметим одно полное колебание на красной кривой. Колебание началось в точке t = 1, а закончилось в точке t =5. Взяв разность между этими двумя точками времени, получим значение периода.
[large T = 5 – 1 = 4 left( text{сек} right)]
Из графика следует, что период T = 4 сек.
- Рассчитаем теперь, какую долю периода составляет интервал времени (large Delta t). Для этого составим такую дробь (large displaystyle frac{Delta t }{T} ):
[large frac{Delta t }{T} = frac{1}{4} ]
Полученное значение дроби означает, что красная кривая сдвинута относительно точки t = 0 и черной кривой на четверть периода.
- Нам известно, что одно полное колебание — один полный оборот (цикл), синус (или косинус) совершает, проходя каждый раз угол (large 2pi ). Найдем теперь, как связана найденная доля периода с углом (large 2pi ) полного цикла.
Для этого используем формулу:
[large boxed{ frac{Delta t }{T} cdot 2pi = varphi_{0} }]
(large displaystyle frac{1}{4} cdot 2pi = frac{pi }{2} =varphi_{0} )
Значит, интервалу (large Delta t) соответствует угол (large displaystyle frac{pi }{2} ) – это начальная фаза для красной кривой на рисунке.
- В заключение обратим внимание на следующее. Начало ближайшего к точке t = 0 периода красной кривой сдвинуто вправо. То есть, кривая запаздывает относительно «чистого» синуса.
Чтобы обозначить запаздывание, будем использовать знак «минус» для начального угла:
[large varphi_{0} = — frac{pi }{2} ]
Примечание: Если на кривой колебаний начало ближайшего периода лежит левее точки t = 0, то в таком случае, угол (large displaystyle frac{pi }{2} ) имеет знак «плюс».
Для не сдвинутого влево, либо вправо, синуса или косинуса, начальная фаза нулевая (large varphi_{0} = 0 ).
Для синуса или косинуса, сдвинутого влево по графику и опережающего обычную функцию, начальная фаза берется со знаком «+».
А если функция сдвинута вправо и запаздывает относительно обычной функции, величину (large varphi_{0} ) записываем со знаком «-».
Примечания:
- Физики начинают отсчет времени из точки 0. Поэтому, время в задачах будет величиной не отрицательной.
- На графике колебаний начальная фаза ( varphi_{0}) влияет на вертикальный сдвиг точки, из которой стартует колебательный процесс. Значит, можно для простоты сказать, что колебания имеют начальную точку.
Благодаря таким допущениям график колебаний при решении большинства задач можно изображать, начиная из окрестности нуля и преимущественно в правой полуплоскости.
Математический маятник
Эта модель рассматривает движение груза, подвешенного на нитке. Описывается система, в которой масса нитки намного меньше массы груза, а ее длина намного больше его размеров.
Также нить должна быть невесомой и нерастяжимой.
Груз в этом случае считается материальной точкой.
При выполнении этих условий частота колебаний маятника и период не будут зависеть от массы груза. Движение математического маятника рассматривается при небольшом угле отклонения (α). Последний измеряется в радианах, поэтому приблизительно соответствует по значению его синусу и тангенсу. Этот же угол пропорционален отношению смещения на длину нити:
α=x/l.
На маятник действует синусовая составляющая силы тяжести и тангенсовая сила натяжения нити. Согласно второму закону Ньютона: ma=-mgsin (α). Откуда можно получить a=-gx/l
Вторая производная уравнения движения дает a=-(ω)^2x
Таким образом: -gx/l=-(ω)^2x -> ω ^2=g/l.
Период: T=2π /ω T=2π*sqrt (g/l)
Это формула Галилея, которая описывает движение математического маятника.
Формула частоты колебаний для математического маятника: v=sqrt (l/g)/2π.
Частные случаи формул для вычисления циклической частоты
Груз на пружине (пружинный маятник — идеальная модель) совершает гармонические колебания с круговой частотой равной:
$k$ — коэффициент упругости пружины; $m$ — масса груза на пружине.
Малые колебания физического маятника будут приблизительно гармоническими колебаниями с циклической частотой равной:
где $J$ — момент инерции маятника относительно оси вращения; $a$ — расстояние между центром масс маятника и точкой подвеса; $m$ — масса маятника.
Примером физического маятника является математический маятник. Круговая частота его колебаний равна:
где $l$ — длина подвеса.
Угловая частота затухающих колебаний находится как:
где $delta $ — коэффициент затухания; в случае с затуханием колебаний ${omega }_0$ называют собственной угловой частотой колебаний.
Круговая частота
Как видим, физический и математический подход к описанию периода функций несколько отличаются, и возникает вопрос их связи.
Из приведенной выше формулы гармонических колебаний можно видеть, что она имеет период:
$$T = {2pi over omega}$$
В эту формулу входит параметр $omega$, который обратно пропорционален периоду. При сравнении этой формулы с формулой частоты можно получить:
$$T = {2pi over omega}={1over nu}$$
Или, после упрощений:
$$omega = 2pi nu$$
Таким образом, параметр $omega$ в $2pi$ раз больше частоты колебаний. Поскольку в одном круге $2pi$ радиан, то параметр $omega$ называется «круговой» или «циклической» частотой.
Физический смысл частоты – это количество колебаний, происходящих в системе за единицу времени, а физический смысл круговой частоты – это количество радиан, проходящих функцией, описывающей систему, за единицу времени.

Рис. 3. Круговая (циклическая) частота.
Таким образом, удобный и наглядный параметр частоты может быть легко преобразован для вида, удобного в математических преобразованиях.
Характеристики колебаний
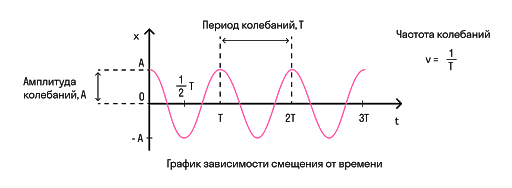
Чтобы перейти к гармоническим колебаниям, нам нужно описать величины, которые помогут нам эти колебания охарактеризовать. Любое колебательное движение можно описать величинами: период, частота, амплитуда, фаза колебаний.
Период — это время одного полного колебания. Измеряется в секундах и обозначается буквой T.
Формула периода колебаний
T = t/N
T — период [с]
t — время [с]
N — количество колебаний [—]
Также есть величина, обратная периоду — частота. Она показывает, сколько колебаний совершает система в единицу времени.
Формула частоты
ν = N/t = 1/T
ν — частота [Гц]
t — время [с]
T — период [с]
N — количество колебаний [—]
Амплитуда — это максимальное отклонение от положения равновесия. Измеряется в метрах и обозначается либо буквой A, либо xmax.
Она используется в уравнении гармонических колебаний:

Уравнение гармонических колебаний
Вернёмся к общему гармоническому закону (1). Дифференцируем это равенство:
 . (4)
. (4)
Теперь дифференцируем полученное равенство (4):
 . (5)
. (5)
Давайте сопоставим выражение (1) для координаты и выражение (5) для проекции ускорения. Мы видим, что проекция ускорения отличается от координаты лишь множителем  :
:
 . (6)
. (6)
Это соотношение называется уравнением гармонических колебаний. Его можно переписать и в таком виде:
 . (7)
. (7)
C математической точки зрения уравнение (7) является дифференциальным уравнением. Решениями дифференциальных уравнений служат функции (а не числа, как в обычной алгебре). Так вот, можно доказать, что:
-решением уравнения (7) является всякая функция вида (1) с произвольными  ;
;
-никакая другая функция решением данного уравнения не является.
Иными словами, соотношения (6), (7) описывают гармонические колебания с циклической частотой  и только их. Две константы
и только их. Две константы  определяются из начальных условий — по начальным значениям координаты и скорости.
определяются из начальных условий — по начальным значениям координаты и скорости.
Как связаны характеристики колебаний формулы
Движение по окружности и колебательное движение имеют определенную схожесть, так как эти виды движения могут быть периодическими.
Поэтому, основные формулы, применимые для движения по окружности, подойдут так же, для описания колебательного движения.
- Связь между периодом, количеством колебаний и общим временем колебательного процесса:
[large boxed{ T cdot N = t }]
( large T left( c right) ) – время одного полного колебания (период колебаний);
( large N left( text{шт} right) ) – количество полных колебаний;
( large t left( c right) ) – общее время для нескольких колебаний;
- Период и частота колебаний связаны так:
[large boxed{ T = frac{1}{nu} }]
(large nu left( text{Гц} right) ) – частота колебаний.
- Количество и частота колебаний связаны формулой:
[large boxed{ N = nu cdot t}]
- Связь между частотой и циклической частотой колебаний:
[large boxed{ nu cdot 2pi = omega }]
(large displaystyle omega left( frac{text{рад}}{c} right) ) – циклическая (круговая) частота колебаний.
- Фаза и циклическая частота колебаний связаны так:
[large boxed{ varphi = omega cdot t + varphi_{0} }]
(large varphi_{0} left( text{рад} right) ) — начальная фаза;
(large varphi left( text{рад} right) ) – фаза (угол) в выбранный момент времени t;
- Между фазой и количеством колебаний связь описана так:
[large boxed{ varphi = N cdot 2pi }]
- Интервал времени (large Delta t ) (сдвигом) и начальная фаза колебаний связаны:
[large boxed{ frac{Delta t }{T} cdot 2pi = varphi_{0} }]
(large Delta t left( c right) ) — интервал времени, на который относительно точки t=0 сдвинуто начало ближайшего периода.
Теги
Амплитуда, период, частота колебаний.
Амплитуда колебаний (лат. amplitude — величина) — это наибольшее отклонение колеблющегося тела от положения равновесия.
Для маятника это максимальное расстояние, на которое удаляется шарик от своего положения равновесия (рисунок ниже). Для колебаний с малыми амплитудами за такое расстояние можно принимать как длину дуги 01 или 02, так и длины этих отрезков.

Амплитуда колебаний измеряется в единицах длины — метрах, сантиметрах и т. д. На графике колебаний амплитуда определяется как максимальная (по модулю) ордината синусоидальной кривой, (см. рис. ниже).

Период колебаний.
Период колебаний — это наименьший промежуток времени, через который система, совершающая колебания, снова возвращается в то же состояние, в котором она находилась в начальный момент времени, выбранный произвольно.
Другими словами, период колебаний (Т) — это время, за которое совершается одно полное колебание. Например, на рисунке ниже это время, за которое грузик маятника перемещается из крайней правой точки через точку равновесия О в крайнюю левую точку и обратно через точку О снова в крайнюю правую.

За полный период колебаний, таким образом, тело проходит путь, равный четырем амплитудам. Период колебаний измеряется в единицах времени — секундах, минутах и т. д. Период колебаний может быть определен по известному графику колебаний, (см. рис. ниже).
Понятие «период колебаний», строго говоря, справедливо, лишь когда значения колеблющейся величины точно повторяются через определенный промежуток времени, т. е. для гармонических колебаний. Однако это понятие применяется также и для случаев приблизительно повторяющихся величин, например, для затухающих колебаний.
Частота колебаний.
Частота колебаний — это число колебаний, совершаемых за единицу времени, например, за 1 с.
Единица частоты в СИ названа герцем (Гц) в честь немецкого физика Г. Герца (1857-1894). Если частота колебаний (v) равна 1 Гц, то это значит, что за каждую секунду совершается одно колебание. Частота и период колебаний связаны соотношениями:
 .
.
В теории колебаний пользуются также понятием циклической, или круговой частоты ω. Она связана с обычной частотой v и периодом колебаний Т соотношениями:
 .
.
Циклическая частота — это число колебаний, совершаемых за 2π секунд.
Гармонические колебания
О чем эта статья:
9 класс, 11 класс, ЕГЭ/ОГЭ
Статья находится на проверке у методистов Skysmart.
Если вы заметили ошибку, сообщите об этом в онлайн-чат
(в правом нижнем углу экрана).
Механические колебания
Механические колебания — это физические процессы, которые точно или приблизительно повторяются через одинаковые интервалы времени.
Колебания делятся на два вида: свободные и вынужденные.
Свободные колебания
Это колебания, которые происходят под действием внутренних сил в колебательной системе.
Они всегда затухающие, потому что весь запас энергии, сообщенный в начале, в конце уходит на совершение работы по преодолению сил трения и сопротивления среды (в этом случае механическая энергия переходит во внутреннюю). Из-за этого свободные колебания почти не имеют практического применения.
Вынужденные колебания
А вот вынужденные колебания восполняют запас энергии внешним воздействием. Если это происходит каждый период, то колебания вообще затухать не будут.
Вынужденные колебания — это колебания, которые происходят под действием внешней периодически меняющейся силы.
Частота, с которой эта сила воздействует, равна частоте, с которой система будет колебаться.
Например, качели. Если вас кто-то будет на них качать, каждый раз давая толчок, когда вы приходите в одну и ту же точку — такое колебание будет считаться вынужденным.
Это колебание все еще будет считаться вынужденным, если вас будут раскачивать из положения равновесия. Просто в данном случае амплитуда (о которой речь пойдет чуть ниже) будет увеличиваться с каждым колебанием.
Автоколебания
Иногда вынужденному колебанию не нужно внешнего воздействия, чтобы случиться. Бывают такие системы, в которых это внешние воздействие возникает само из-за способности регулировать поступление энергии от постоянного источника.
У автоколебательной системы есть три важных составляющих:
- сама колебательная система
- источник энергии
- устройство обратной связи, обеспечивающей связь между источником и системой
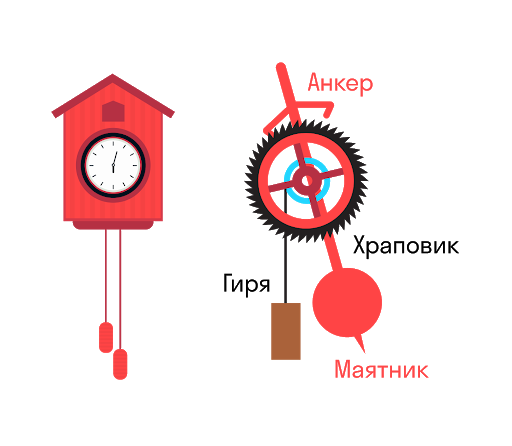
Часы с кукушкой — пример автоколебательной системы. Гиря на ниточке (цепочке) стремится вращать зубчатое колесо (храповик). При колебаниях маятника анкер цепляет за зубец, и вращение приостанавливается.
Но в результате маятник получает толчок, компенсирующий потери энергии из-за трения. Потенциальная энергия гири, которая постепенно опускается, расходуется на поддержание незатухающих колебаний.
Характеристики колебаний
Чтобы перейти к гармоническим колебаниям, нам нужно описать величины, которые помогут нам эти колебания охарактеризовать. Любое колебательное движение можно описать величинами: период, частота, амплитуда, фаза колебаний.
Период — это время одного полного колебания. Измеряется в секундах и обозначается буквой T.
Формула периода колебаний
T = t/N
N — количество колебаний [—]
Также есть величина, обратная периоду — частота. Она показывает, сколько колебаний совершает система в единицу времени.
Формула частоты
ν = N/t = 1/T
N — количество колебаний [—]
Амплитуда — это максимальное отклонение от положения равновесия. Измеряется в метрах и обозначается либо буквой A, либо x max .
Она используется в уравнении гармонических колебаний:
Гармонические колебания
Простейший вид колебательного процесса — простые гармонические колебания, которые описывают уравнением:
Уравнение гармонических колебаний
x — координата в момент времени t [м]
t — момент времени [с]
(2πνt) в этом уравнении — это фаза. Ее обозначают греческой буквой φ
Фаза колебаний
t — момент времени [с]
Фаза колебаний — это физическая величина, которая показывает отклонение точки от положения равновесия. Посмотрите на рисунок, на нем изображены одинаковые фазы:
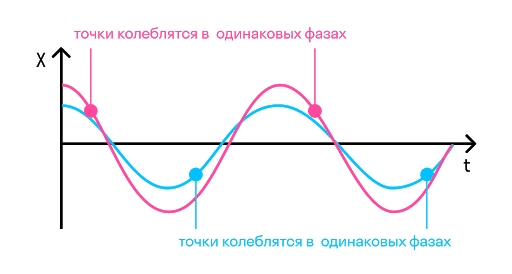
Например, в тех же самых часах с кукушкой маятник совершает колебания. Он качается слева направо и приходит в самую правую точку. В той же фазе он будет находиться, когда придет в ту же точку, идя справа налево. Если мы возьмем точку на сантиметр левее самой правой, то идя в нее не слева направо, а справа налево, мы получим уже другую фазу.
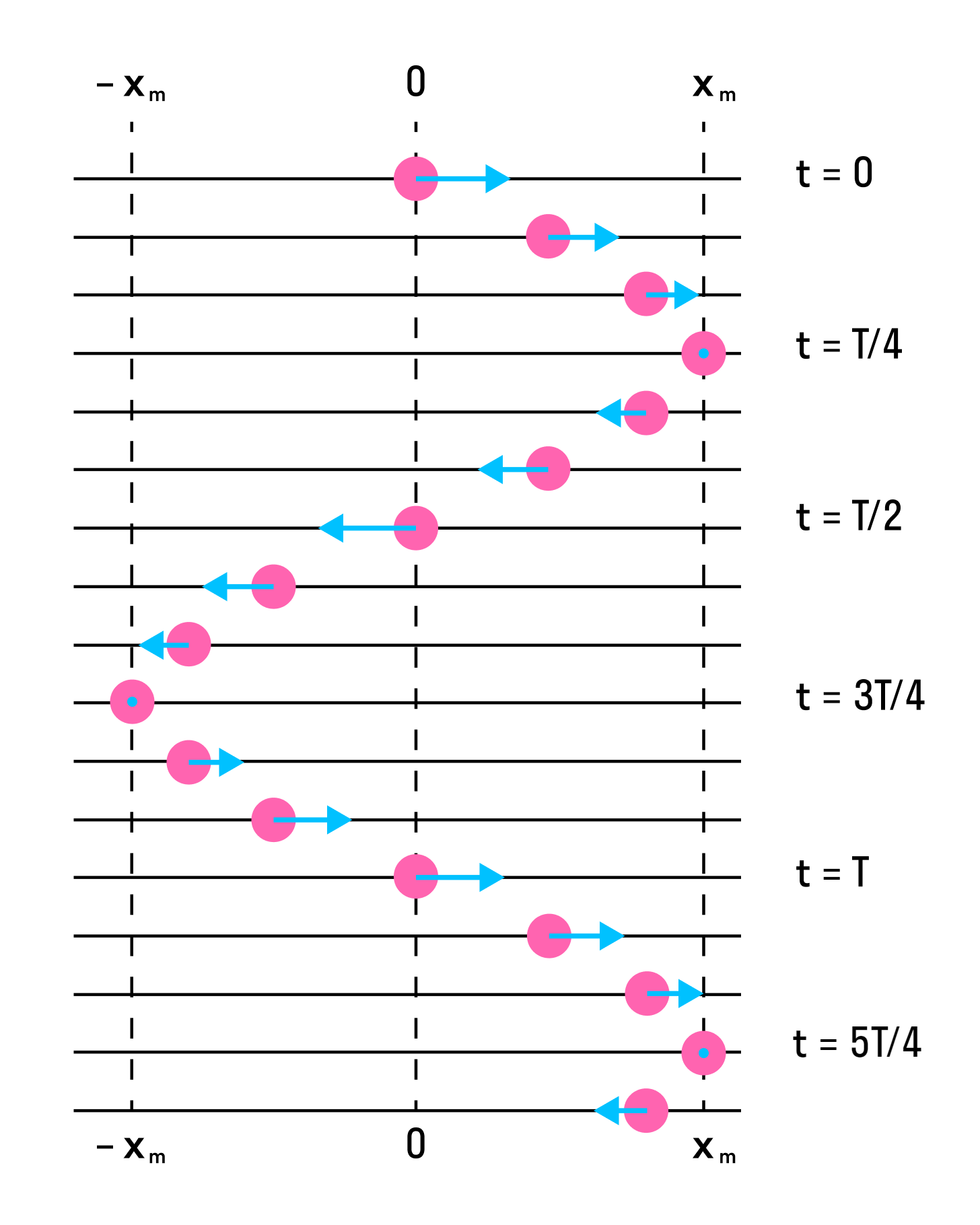
На рисунке ниже показаны положения тела через одинаковые промежутки времени при гармонических колебаниях. Такую картину можно получить при освещении колеблющегося тела короткими периодическими вспышками света (стробоскопическое освещение). Стрелки изображают векторы скорости тела в различные моменты времени.
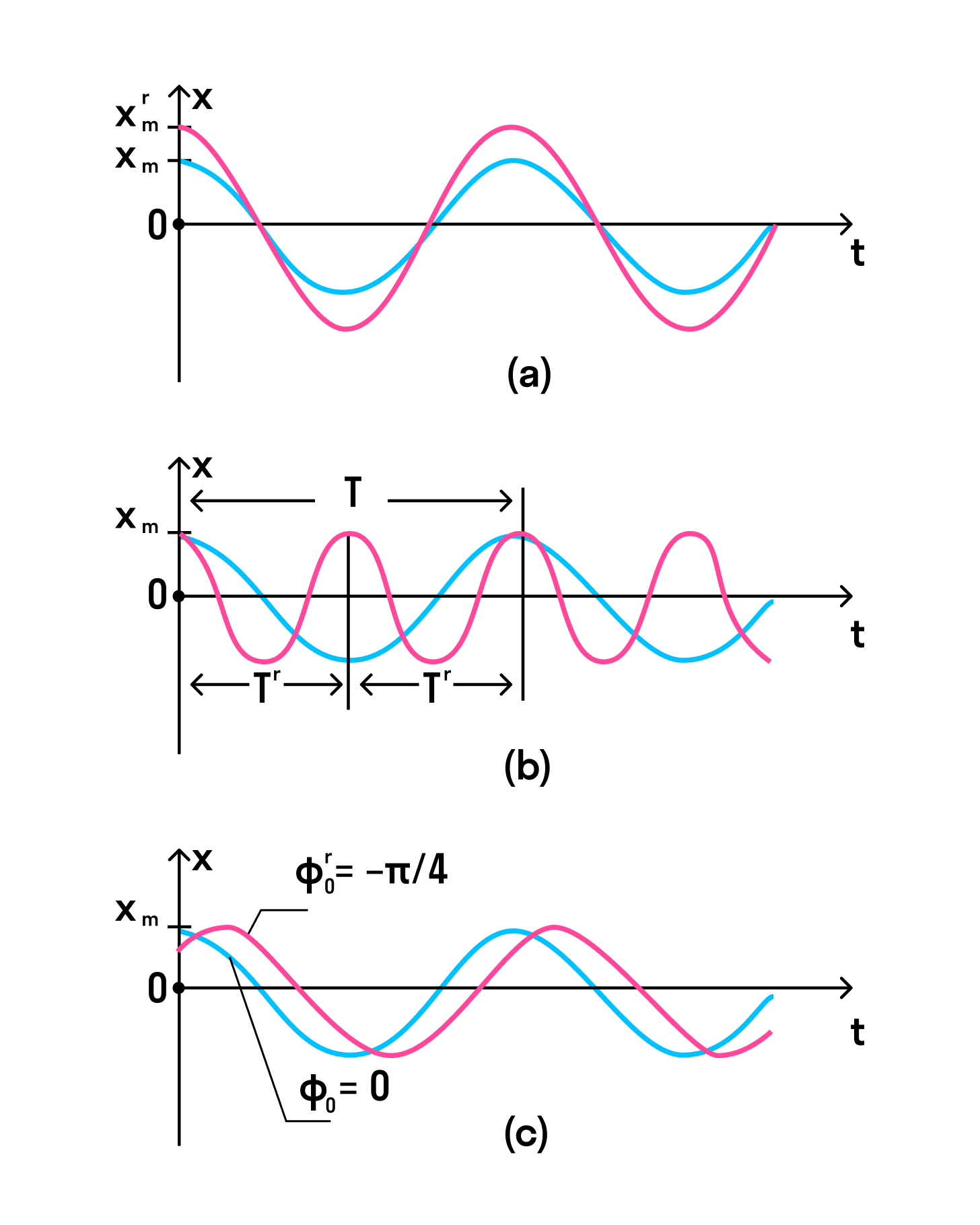
Если изменить период, начальную фазу или амплитуду колебания, графики тоже изменятся.
На рисунке ниже во всех трех случаях для синих кривых начальная фаза равна нулю, а в последнем (с) — красная кривая имеет меньшую начальную фазу.
В первом случае (а) красная кривая описывает колебание, у которого амплитуда больше колебания, описанного синей линией.
Во втором случае (b) красная кривая отличается от синей только значением периода — у красной период в два раза меньше.
Математический маятник
Математический маятник — отличный пример гармонических колебаний. Если мы подвесим шарик на нити, то это еще не будет математическим маятником — пока он только физический.
Математическим этот маятник станет, если размеры шарика много меньше длины нити (тогда этими размерами можно пренебречь и рассматривать шарик как материальную точку), растяжение нити очень мало, а масса нити во много раз меньше массы шарика.
Математическим маятником называется система, которая состоит из материальной точки массой m и невесомой нерастяжимой нити длиной l, на которой материальная точка подвешена, и которая находится в поле силы тяжести (или других сил).
Период малых колебаний математического маятника в поле силы тяжести Земли определяется по формуле:
Формула периода колебания математического маятника
l — длина нити [м]
g — ускорение свободного падения [м/с 2 ]
На планете Земля g = 9,8 м/с 2
Пружинный маятник
Пружинный маятник — это груз, прикрепленный к пружине, массой которой можно пренебречь.
В пружинном маятнике колебания совершаются под действием силы упругости.
Пока пружина не деформирована, сила упругости на тело не действует.
Формула периода колебания пружинного маятника
m — масса маятника [кг]
k — жесткость пружины [Н/м]
Закон сохранения энергии для гармонических колебаний
Физика — такая клевая наука, в которой ничего не исчезает бесследно и не появляется из ниоткуда. Эту особенность описывает закон сохранения энергии.
Рассмотрим его на примере математического маятника.
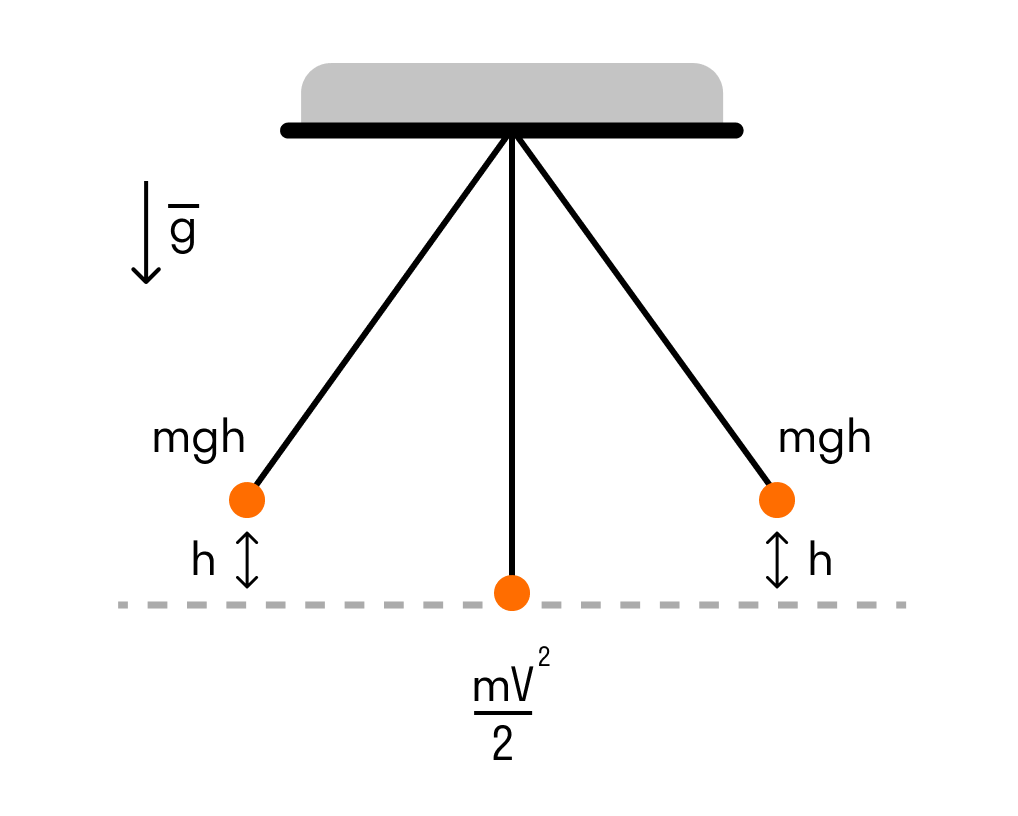
- Когда маятник отклоняют на высоту h, его потенциальная энергия максимальна.
- Когда маятник опускается, потенциальная энергия переходит в кинетическую. Причем в нижней точке, где потенциальная энергия равна нулю, кинетическая энергия максимальна и равна потенциальной энергии в верхней точке. Скорость груза в этой точке максимальна.
Онлайн-курсы физики в Skysmart не менее увлекательны, чем наши статьи!
Гармонические колебания
теория по физике 🧲 колебания и волны
Гармоническими законами называют законы синуса и косинуса. Следовательно, гармоническими колебаниями называют те колебания, при которых координата тела изменяется синусоидально или косинусоидально.
Гармонические колебания — колебания, при которых координата тела изменяется с течением времени по гармоническому закону.
Ниже представлен график косинусоидальной функции. Обратите внимание, что косинус при возрастании аргумента от нуля сначала меняется медленно, а потом он все быстрее и быстрее приближается к нулю. Пройдя через него, его модуль снова быстро возрастает. Но по мере приближения к максимальному значению он снова замедляется. Точно так же меняются координаты свободно колеблющегося тела.
Важно! Гармоническими можно считать только те колебания, что совершаются грузом, закрепленном на пружине, или математическим маятником, отклоняемым на малый угол, при котором ускорение тела пропорционально его смещению.
Уравнение движения гармонических колебаний
Известно, что ускорение колеблющегося на пружине груза пропорционально его смещению от положения равновесия:
Также известно, что ускорение есть вторая производная координаты. Следовательно, при свободных колебаниях координата изменяется со временем так, что вторая производная координаты по времени прямо пропорциональна самой координате и противоположна ей по знаку.
Вид — группа особей, сходных по морфолого-анатомическим, физиолого-экологическим, биохимическим и генетическим признакам, занимающих естественный ареал, способных свободно скрещиваться между собой и давать плодовитое потомство.
x″ = − x m a x cos . t = − x
Видно, что в этом случае теряется величина k m . . , служащая постоянной для каждой колебательной системы. Чтобы получить ее во второй производной, нужно усложнить функцию до следующего вида:
x = x m a x cos . √ k m . . t
Тогда первая производная примет
Вид — группа особей, сходных по морфолого-анатомическим, физиолого-экологическим, биохимическим и генетическим признакам, занимающих естественный ареал, способных свободно скрещиваться между собой и давать плодовитое потомство.
x′ = − √ k m . . x m a x sin . √ k m . . t
Вторая производная примет вид:
x″ = − k m . . x m a x cos . √ k m . . t = − k m . . x
Так как мы получили ровно такое же выражение, то описать свободные колебания можно уравнениями следующего вида:
x = x m a x sin . √ k m . . t
x = x m a x cos . √ k m . . t
Обозначим постоянную величину √ k m . . , зависящую от свойств системы, за ω0:
x = x m a x sin . ω 0 t
x = x m a x cos . ω 0 t
Само уравнение движения, описывающего свободные колебания, примет вид:
Период и частота гармонических колебаний
Минимальный промежуток времени T, через который движение тела полностью повторяется, называют периодом колебания. Зная его, можно вычислить частоту колебаний, равную числу колебаний в единицу времени. Эти величины связаны между собой выражением:
Через промежуток времени, равный периоду T и соответствующий изменению аргумента косинуса на ω 0 T , движение тела повторяется, и косинус принимает прежнее значение. Но из математики известно, что наименьший период косинуса равен 2π. Следовательно:
ω 0 = 2 π T . . = 2 π ν
Таким образом, величина ω 0 представляет собой число колебаний тела, но не за 1 секунду, а за 2 π секунд. Эта величина называется циклической (круговой) частотой. А частоту свободных колебаний называют собственной частотой колебательной системы.
Зависимость частоты и периода свободных колебаний от свойств системы
Изначально за величину ω 0 мы принимали постоянную, характеризующую свойства системы:
Теперь мы выяснили, что циклическая частота связана с периодом и частотой колебаний. Следовательно, период и частота колебаний также зависят от свойств системы:
ω 0 = √ k m . . = 2 π T . . = 2 π ν
Отсюда период и частота колебаний соответственно равны:
T = 2 π ω 0 . . = 2 π √ m k . .
ν = 1 2 π . . √ k m . .
Вспомним, что свойства колебательной системы математического маятника определяются постоянной величиной g l . . . Следовательно, циклическая частота для него равна:
Отсюда период и частота колебаний математического маятника соответственно равны:
T = 2 π ω 0 . . = 2 π √ l g . .
ν = 1 2 π . . √ g l . .
Эта формула была впервые получена и проверена на опыте голландским ученым Г. Гюйгенсом, современником И. Ньютона.
Период колебания возрастает с увеличением длины маятника. От массы маятника он не зависит. Это легко проверить на опыте с различными маятниками. Зависимость периода от ускорения свободного падения также легко прослеживается. Чем меньше величина g, тем больше период колебания маятника, и, следовательно, тем медленнее идут часы с маятником. Так, часы с маятником в виде груза на стержне отстанут в сутки почти на 3 с, если их поднять из подвала на верхний этаж Московского университета, который находится на высоте 200 м. И это только за счет уменьшения ускорения свободного падения с высотой.
Зависимость периода колебаний маятника от значения g используется на практике. Измеряя период колебания, можно легко измерить g. Ускорение свободного падения меняется с географической широтой. Но и на данной широте оно неодинаково, так как плотность земной коры неоднородна. В районах, где залегают более плотные породы, ускорение свободного падения принимает большие значения.
Пример №1. Сколько колебаний совершает математический маятник длиной 4,9 м за время 5 минут?
Искомое число колебаний равно отношению времени к периоду колебаний:
Период колебаний для математического маятника определяется формулой:
N = t 2 π . . √ g l . . = 300 2 · 3 , 14 . . √ 9 , 8 4 , 9 . . ≈ 68
Фаза колебаний
При заданной амплитуде гармонических колебаний координата колеблющегося тела в любой момент времени однозначно определяется аргументом косинуса или синуса, который равен ω 0 t . Обозначим его за ϕ и получим:
Величину ϕ, стоящую под знаком косинуса или синуса, называют фазой колебаний, описываемой этой функцией. Выражается фаза в угловых единицах — радианах (рад).
Фаза определяет значение не только координаты, но и других физических величин (к примеру, скорости и ускорения, которые также изменяются по гармоническому закону). Отсюда можно сделать вывод, что фаза определяет при заданной амплитуде состояния колебательной системы в любой момент времени.
Колебания с одинаковыми частотами и амплитудами могут отличаться друг от друга фазами. Так как ω 0 = 2 π T . . , фаза определяется формулой:
ϕ = ω 0 t = 2 π t T . .
t T . . — отношение, которое указывает, какая часть периода прошла от момента начала колебаний. Любому моменту времени, выраженному в долях периода, соответствует значение фазы, выраженное в радианах. К примеру:
Можно изобразить на графике зависимость координаты колеблющейся точки не от времени, а от фазы. В этом случае графиком также будет являться косинусоида (или синусоида), но аргументом функции будет не время (период), а фаза, выражающаяся в радианах (см. рис.).
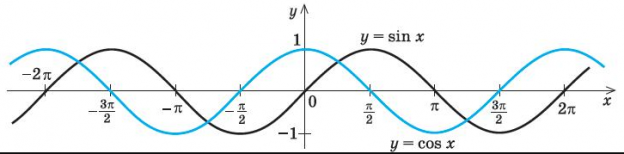
Синус от косинуса отличается только смещением аргумента на π 2 . . (см. рис. ниже). Поэтому для описания гармонических колебаний можно использовать как синусоидальный, так и косинусоидальный закон.
Выбор закона зависит от условий задачи. Если колебания начинаются с того, что тело выводят из положения равновесия и отпускают, удобнее пользоваться косинусоидальным законом, поскольку в начальный момент времени косинусоида показывает, что это тело отклонено максимально, а не находится в положении равновесия. Если для того чтобы начались колебания, совершают толчок, удобнее использовать синусоидальный закон, так как начальному моменту времени на синусоиде соответствует положение равновесия.
Колебания, совершаемые по закону синуса и косинуса, отличаются только фазой, которая смещена на значение, равное π 2 . . . Это значение называют сдвигом фаз, или их разностью. Поэтому косинусоидальная функция также может быть записана как:
x = x m a x cos . ω 0 t = x m a x sin . ( ω 0 t + π 2 . . )
Превращение энергии при гармонических колебаниях
Чтобы описать превращения энергии при гармонических колебаниях, условимся, что силой трения будем пренебрегать. Для описания обратимся к рисунку ниже.
Точке О на рисунке соответствует положение равновесия шарика. Если его оттянуть на расстояние xmax, равное амплитуде, пружина получит потенциальную энергию, которая примет в этом положении максимальное значение, равное:
W p m a x = k x 2 m a x 2 . .
Когда шарик отпускают, возникает сила упругости, под действием которой шарик устремляется влево. По мере уменьшения расстояния между точкой максимального отклонения и положением равновесия уменьшается и потенциальная энергия. Но в это время увеличивается кинетическая энергия шарика. Когда шарик проходит через положение равновесия в первый раз, его потенциальная энергия становится равной нулю, а кинетическая энергия обретает максимальное значение (скорость в этот момент времени тоже максимальна):
W k m a x = m v 2 m a x 2 . .
После прохождения точки О расстояние между шариком и положением равновесия снова увеличивается, и потенциальная энергия растет. Кинетическая же энергия при этом уменьшается. А в крайнем положении слева она становится равной нулю, в то время как потенциальная энергия снова примет максимальное значение.
Так как мы условились пренебрегать трением, данную колебательную систему можно считать изолированной. Тогда в ней должен соблюдаться закон сохранения энергии. Согласно ему, полная механическая энергия системы равна:
W = W p + W k = k x 2 x 2 . . + m v 2 x 2 . . = k x 2 m a x 2 . . = m v 2 m a x 2 . .
В действительности свободные колебания всегда затухают, так как в колебательной системе действует сила трения. И часть механической энергии рассеивается в виде тепла. Пример графика затухающих колебаний выглядит следующим образом:
Пример №2. Груз, прикрепленный к пружине, колеблется на горизонтальном гладком стержне. Найдите отношение кинетической энергии груза к его потенциальной энергии системы в момент, когда груз находится в точке, расположенной посередине между крайним положением и положением равновесия.
Так как груз находится посередине между крайним положением и положением равновесия, его координата равна половине амплитуды:
В это время потенциальная энергия груза будет равна:
W p = k x 2 2 . . = k ( x m a x 2 . . ) 2 2 . . = k x 2 m a x 8 . .
Согласно закону сохранения энергии, кинетическая энергия в это время равна:
Полная механическая энергия системы равна максимальной потенциальной энергии:
W = W p m a x = k x 2 m a x 2 . .
Тогда кинетическая энергия равна:
W k = k x 2 m a x 2 . . − k x 2 m a x 8 . .
Следовательно, отношение кинетической энергии к потенциальной будет выглядеть так:
W k W p . . = k x 2 m a x 2 . . − k x 2 m a x 8 . . k x 2 m a x 8 . . . . = k x 2 m a x 2 . . 8 k x 2 m a x . . − 1 = 4 − 1 = 3
Резонанс
Самый простой способ возбуждения незатухающих колебаний состоит в том, что на систему воздействуют внешней периодической силой. Такие колебания называют вынужденными.
Работы силы над такой системой обеспечивает приток энергии к системе извне. Приток энергии не дает колебаниям затухнуть, несмотря на действие сил трения.
Особый интерес вызывают вынужденные колебаний в системе, способной совершать свободные колебания. Примером такой системы служат качели. Их не получится отклонить на большой угол всего лишь одним толчком. Если их толкать то в одну, то в другую сторону, тоже ничего не получится. Но если подталкивать качели всякий раз, как они сравниваются с нами, можно раскачать их очень сильно. При этом не нужно прикладывать большую силу, но на это понадобится время. Причем после каждого такого толчка амплитуда колебаний качелей будет увеличиваться до тех пор, пока не достигнет своего максимального значения. Такое явление называется резонансом.
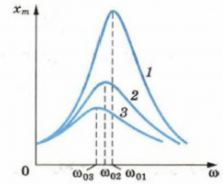
Резонанс — резкое возрастание амплитуды вынужденных колебаний при совпадении частоты изменения внешней силы, действующей на систему, с частотой свободных колебаний.
Графически явление резонанса можно изобразить как резкий скачок графика вверх (см. рис. выше). Причем высота «зубца», или амплитуда колебаний, будет зависеть от величины сил трения. Чем больше сила трения, тем меньше при резонансе возрастает амплитуда вынужденных колебаний. Это можно продемонстрировать графиками на рисунке ниже. Графику 1 соответствует минимальное трение, графику 3 — максимальное.
На явлении резонанса основан принцип работы частотомера — устройства, предназначенного для измерения частоты переменного тока. Он состоит из набора упругих пластин, которые закреплены на одной планке. Каждая пластина обладает определенной собственной частотой колебаний, которая зависит от упругих свойств, длины и массы. Собственные колебания пластин известны. Под действием электромагнита планка, а вместе с ней и пластины совершают вынужденные колебания. Но лишь та пластина, собственная частота которой совпадает с частотой колебаний планки, будет иметь большую амплитуду колебаний. Таким образом, определяется частота переменного тока.
Пример №3. Автомобиль движется по неровной дороге, на которой расстояние между буграми равно приблизительно 8 м. Период свободных колебаний автомобиля на рессорах 1,5 с. При какой скорости автомобиля его колебания в вертикальной плоскости станут особенно заметными?
Колебания автомобиля в вертикальной плоскости будут заметны тогда, когда частота наезда на бугры сравняется с частотой свободных колебаний автомобиля на рессорах. Поскольку частота обратно пропорциональна периоду, можно сказать, что резонанс будет достигнут тогда, когда автомобиль будет наезжать на бугры каждые 1,5 секунды. Зная расстояние между буграми и время, можем вычислить скорость:
v = s t . . = 8 1 , 5 . . ≈ 5 , 33 ( м с . . ) ≈ 19 , 2 ( к м ч . . )
Смещение груза пружинного маятника меняется с течением времени по закону x = A cos . 2 π T . . t , где период Т = 1 с. Через какое минимальное время, начиная с момента t = 0, потенциальная энергия маятника вернется к своему исходному значению?
источники:
http://skysmart.ru/articles/physics/garmonicheskie-kolebaniya
http://spadilo.ru/garmonicheskie-kolebaniya/
| Время, t (с) | 0 |
| Фаза, ϕ (рад) | 0 |
Резонанс
При заданных возмущающей силе Fmax.возм
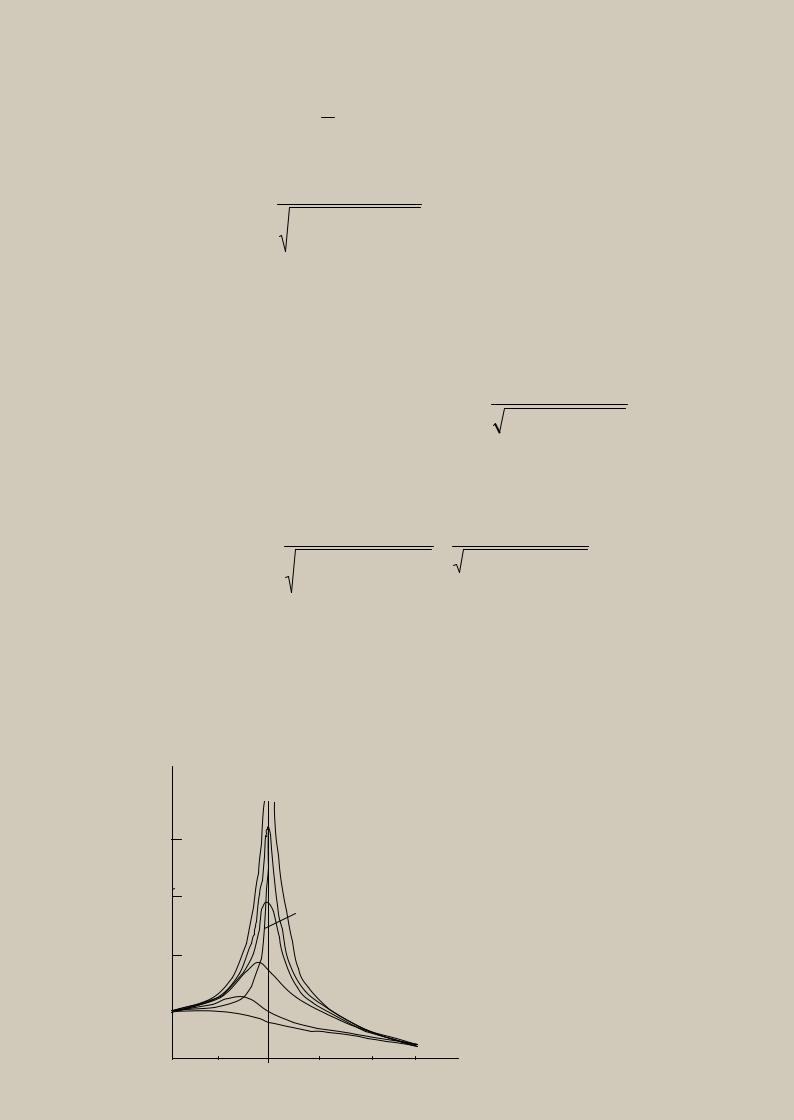
и коэффициенте трения β амплитуда Ym является функцией только угловой частоты возмущающей силы.
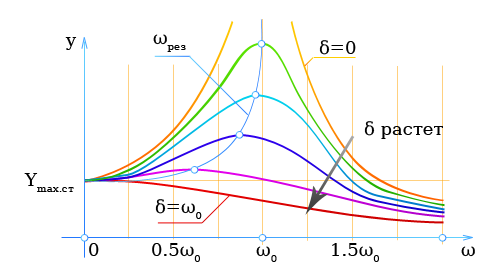
На рисунке показана зависимость Ym от ω (резонансная кривая).
Параметром служит коэффициент затухания δ.
При ω ≈ ω0 она достигает особенно большого значения (резонанс).
При самых малых значениях δ величина Ym резко возрастает.
Если δ > 0, то в случае резонанса ω < ω0; величина Ymax.ст представляет собой статическое отклонение системы под действием постоянной силы Ymax.возм (ω = 0).
Для определения резонансной частоты необходимо найти максимум функции Ym = Ym(ω) и приравнять первую производную нулю; тогда, если
| ωрез | резонансная частота, при которой амплитуда максимальна, | радиан/сек |
|---|---|---|
| ω0 | частота собственных незатухающих колебаний системы, | радиан/сек |
| m | масса колебательной системы, | кг |
| β | коэффициентом вязкого трения, | кг/сек |
| δ | коэффициентом затухания, | радиан/сек |
Частота резонанса
[
ω_{рез} = sqrt{ω_{0}^2 — frac{β^2}{2m^2}} = sqrt{ω_{0}^2 — 2δ^2}
]
Условие отсутствия резонанса
[
δ geqslant frac{ω_{0}}{sqrt{2}}
]
Амплитуда резонанса
Чтобы найти величину амплитуды в резонансном случае, нужно подставить формулу (1) в формулу отклонения при вынужденных колебаниях.
Если
| Ymax.рез | резонансная амплитуда колебаний системы, | метр |
|---|---|---|
| Fmax.возм | максимальное значение возмущающей силы, | Ньютон |
| m | масса колебательной системы, | кг |
| ωрез | резонансная частота, при которой амплитуда максимальна, | радиан/сек |
| ω0 | частота собственных незатухающих колебаний системы, | радиан/сек |
| ω | частота колебаний системы с затуханием, | радиан/сек |
| β | коэффициентом вязкого трения, | кг/сек |
| δ | коэффициентом затухания, | радиан/сек |
то имеем
[
Y_m = frac
{
F_{max.возм}
}
{
β sqrt{ ω_{0}^2 — frac{β^2}{4m^2} }
}
]
[
Y_m = frac{F_{max.возм}}{βω}
]
[
Y_m = frac{F_{max.возм}}{2δmω}
]
Согласно формуле, разность фаз α также зависит от частоты возмущающей силы.
Параметром служит коэффициент δ.
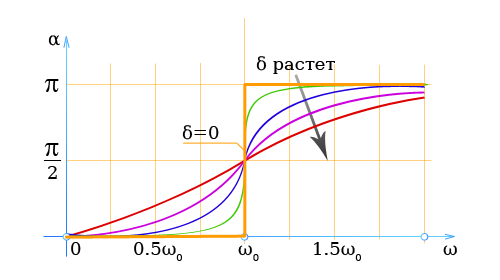
На рисунке представлена зависимость α от частоты.
Независимо от величины затухания при ω = ω0 разность фаз составляет
[
α = 90°
]
Резонанс играет большую роль в технике и в повседневной жизни. В большинстве механических устройств под действием внешних периодических сил могут возникать колебания. При резонансе происходит нарастание амплитуды колебаний, и это может привести к разрушениям («резонансная катастрофа»). В случае вращательного движения резонансную частоту называют критическим числом оборотов.
Резонанс |
стр. 558 |
|---|