|
Понятие
Способы
Свойства
Размерность Арифметические |
Понятие
линейного многообразия
При
рассмотрении примеров линейных
подпространств, было указано, что в
геометрическом пространстве
![]()
векторов пространства каждая прямая и
каждая плоскость, проходящие через
начало координат, определяют линейное
подпространство. Прямым и плоскостям,
не проходящим через начало координат,
соответствует в линейной алгебре новый
математический объект – линейное
многообразие.
Пусть
— линейное пространство,
![]()
— некоторое его подпространство,
содержащее векторы
,
(9)
—
некоторый вектор из пространства
.
Все векторы считаются отложенными от
начала координат. Множество
всевозможных векторов вида
![]()
,
где вектор
есть любой вектор из множества векторов
(9) или любая их линейная комбинация,
называется линейным
многообразием
и обозначается
![]()
.
Линейное многообразие, очевидно, получено
сдвигом подпространства
на вектор
(рис. 4.5). Вектор
называется вектором
сдвига,
подпространство
—
направляющим подпространством
линейного многообразия
.

Линейное
многообразие
обращается в линейное подпространство
,
когда вектор сдвига
.
Пусть
линейное подпространство
— это совокупность всех векторов, лежащих
на прямой, которая проходит через начало
координат (рис. 4.5). Положим один из этих
векторов равным
.
И пусть вектор
![]()
.
Тогда линейное многообразие
состоит из множества векторов
![]()
,
![]()
,
концы которых лежат на прямой, полученной
сдвигом исходной прямой на вектор
.
Способы
задания линейных многообразий
Линейное
многообразие может быть задано с помощью
векторов следующим образом: задается
базис векторного подпространства
и вектор сдвига
.
Другой
способ задания — посредством системы
неоднородных линейных уравнений.
Множество решений неоднородной системы
линейных уравнений является линейным
многообразием. Обоснуем это утверждение.
Напомним, что общее решение системы
линейных уравнений
![]()
складывается из общего решения
однородной системы
![]()
и базисного (частного) решения неоднородной
системы
![]()
.
Общее решение однородной системы есть
линейная комбинация фундаментального
набора решений (ФНР), задающего некоторое
линейное подпространство
.
Линейная комбинация ФНР плюс базисное
решение есть общее решение системы
неоднородных линейных уравнений. Поэтому
линейное многообразие можно представить
как множество решений некоторой в общем
случае неоднородной системы линейных
уравнений
.
Свойства
линейного многообразия.
-
Вектор
сдвигапринадлежит линейному многообразию.
◄Линейное
подпространство содержит нулевой
вектор:
![]()
.
Поэтому в суммах векторов
![]()
содержится вектор
![]()
.►
-
Вектором
сдвига, принадлежащим линейному
многообразию, может быть любой вектор
этого линейного многообразия.
◄Пусть
.
Возьмем произвольный вектор
![]()
.
Тогда существует вектор
![]()
такой, что
![]()
,
причем
![]()
.
Найдем сумму подпространства
и вектора
![]()
.
![]()
.
Получим
то же линейное многообразие
.►
-
Линейное
многообразиеопределяется однозначно
по известным подпространствуи вектору сдвига
.
◄Предположим,
что существует еще одно линейное
многообразие
![]()
,
построенное на линейном подпространстве
,
сдвинутом на вектор
.
Выберем базис
![]()
в подпространстве
.
Любой вектор
из линейного многообразия
![]()
может быть представлен в виде линейной
комбинации векторов базиса линейного
подпространства
и вектора сдвига
![]()
.
Точно
также, в виде линейной комбинации можно
представить любой вектор
![]()
из линейного многообразия
![]()
: ![]()
,
где
![]()
.
Но тогда вектор
![]()
,
а вектор
![]()
.
Векторы
и
— это произвольные векторы из линейных
многообразий
![]()
и
![]()
.
Следовательно,
=
.►
Размерность
линейного многообразия
Определение.
Размерностью
(рангом)
линейного многообразия
называется размерность линейного
подпространства
:
![]()
Если
линейное подпространство
состоит только из нулевого вектора, то
![]()
.
Такое линейное многообразие имеет
размерность
![]()
,
называется 0-мерным линейным многообразием
(ранг равен нулю) и геометрически
соответствует точке (конец единственного
вектора
).
Если
линейное подпространство
![]()
![]()
,
т.е.
состоит из векторов, лежащих на одной
прямой, то линейное многообразие
![]()
называется одномерным. Его ранг равен
единице. Геометрическая интерпретация
многообразия – прямая (концы всех
векторов лежат на прямой), не проходящая
через начало координат.
Линейное
многообразие, полученное из подпространства,
состоящего из векторов плоскости,
называется двумерным. Его геометрический
образ – плоскость.
В
![]()
–мерном векторном пространстве линейное
многообразие размерности ![]()
называется гиперплоскостью,
а размерности ![]()
,
где 
,
— k-мерной
плоскостью.
Подобно
прямым или плоскостям линейные
многообразия могут пересекаться,
скрещиваться, быть параллельными.
Вводится также операция проектирования
одного линейного многообразия на другое.
Об этом подробнее в (9).
Операции
с линейными многообразиями и их взаимное
расположение.
-
Сумма
двух линейных многообразий

и

есть линейное многообразие,
определяемое по следующему правилу:
![]()
.
В
частном случае при
![]()
имеем
![]()
-
Пересечение
двух линейных многообразийи
есть линейное многообразие, вычисляемое
по правилу
![]()
,
где
![]()
.
-
Умножение
линейного многообразия

на число

порождает новое линейное многообразие

,
определяемое так:
![]()
.
-
Параллельность
двух линейных многообразийи
означает, что направляющее подпространство
одного из них содержит направляющее
подпространство другого:
![]()
,
если
![]()
или
![]()
.
-
Скрещивание
двух
линейных многообразийи
имеет место в том случае, если они не
пересекаются и не параллельны.
ПРИМЕР
1. Линейное многообразие
задано системой линейных уравнений
![]()
Найти
линейное подпространство
и вектор сдвига
такие, что
![]()
.
Решение.
Составим расширенную матрицу из
коэффициентов и свободных членов системы
уравнений и преобразуем ее, используя
метод Гаусса.
![]()
![]()
.
Вернемся
к системе уравнений, взяв свободными
переменными
![]()
.
Выделим фундаментальный
набор решений (ФНР)

.
Линейно
независимые векторы
![]()
составляют ФНР, а, следовательно, базис
подпространства
.
Любой вектор
![]()
можно представить в виде
![]()
.
Вектор сдвига есть вектор
.
ПРИМЕР
2. Линейное многообразие
![]()
имеет вид
![]()
,
где
![]()
,
![]()
,
![]()
,
.
Представить линейное
многообразие в виде системы линейных
уравнений.
Решение.
Линейное многообразие
есть множество векторов вида
![]()
или в координатном виде 
.
Перепишем
систему уравнений относительно переменной
![]()
,
выделив столбец свободных членов.

.
Представим систему
матрицей коэффициентов и воспользуемся
методом Гаусса



.
Система совместна
при условии, что ранг матрицы коэффициентов
равен рангу расширенной матрицы (теорема
Кронекера-Капелли).
Следовательно,
![]()
или
![]()
Линейное
многообразие
записано в виде системы неоднородных
линейных уравнений.
Рассмотрим
вопросы взаимного расположения линейных
многообразий. Начнем с простого примера.
ПРИМЕР
3. Пусть в трехмерном линейном векторном
пространстве заданы два двухмерных
многообразия
![]()
где ![]()
и
![]()
,
где ![]()
Найти
пересечение линейных многообразий ![]()
.
Решение.
Произвольный вектор ![]()
,
принадлежащий
как одному так и другому линейному
многообразию, может быть представлен
в виде
![]()
(10)
или
![]()
,
где
![]()
– координаты вектора
в базисах направляющих подпространств
линейных многообразий. Для удобства
перепишем матричное уравнение так
![]()
Чтобы
найти
,
составим расширенную матрицу и
преобразуем ее методом Гаусса-Жордана
![]()
,
откуда
следует 
.
Подставив ![]()
в равенство (10), получим
![]()
.
Следовательно,
две двухмерные плоскости пересекаются
по прямой ( ![]()
).
Такой вывод можно сделать по виду
преобразованной методом Гаусса-Жордана
расширенной матрицы. Во второй строке
2-го и 3-го столбцов матрицы стоят отличные
от нуля цифры. Значит, существует только
одна независимая переменная, например,
![]()
.
ФНР содержит одно решение (один вектор).
Этот вектор составляет базис подпространства
размерности один, являющегося пересечением
направляющих подпространств линейных
многообразий.
Возможны
другие варианты решений для двух
плоскостей в трехмерном пространстве.
Пусть
преобразованная матрица имеет вид
![]()
.
Значок
![]()
поставлен в позициях, содержащих любое
число. Если на пересечении последних
столбца и строки стоит единица, решений
нет (линейные многообразия не пересекаются
![]()
).
Кроме того, поскольку ![]()
зависят от ![]()
,
ФНР будет содержать два независимых
решения (два вектора). Они составят базис
двухмерного подпространства. При наличии
единицы в последней строке последнего
столбца двухмерные плоскости параллельны.
Если
на пересечении последних столбца и
строки стоит нуль, решения существуют
(двухмерные плоскости пересекаются по
плоскости, т.е. совпадают, ![]()
.
Замечание.
В преобразованной методом Гаусса-Жордана
матрице в некоторых позициях могут
стоять вместо единиц и нулей другие
числа. Метод исследования взаиморасположения
многообразий остается справедливым,
если выполнены два условия:
-
Ранг
матрицы базиса направляющего
подпространства линейного многообразия
соответствует рангу матрицы, составленной
из столбцов, у которых только в одной
позиции по вертикали стоит единица. -
Если
все базисные векторы какого-либо
подпространства, расположенные по
столбцам, содержат нули в определенной
строке, то соответствующая матрица с
единицами только в одной позиции по
вертикали должна содержать в этой
строке нули.
ПРИМЕР
4. Рассмотреть все варианты взаимного
расположения трехмерного ![]()
и двумерного ![]()
многообразий в пятимерном пространстве.
Решение.
Перечислим существенно различные
варианты:
1)
,
2)![]()
1а)
Комбинация цифр в последнем столбце
«![]()
»
→ ![]()
.
Многообразия не имеют общих точек.
1б)
Комбинация «
![]()
»
→ ![]()
.
Многообразие
включено в многообразие
.
2а)
Цифра в последнем столбце «1»
→
.
Многообразия не имеют общих точек.
2б)
Цифра в последнем столбце «0»
→ ![]()
Многообразия пересекаются по прямой.
3)
![]()
,
многообразия пересекаются в точке.
4.4.
Метрические пространства
|
Аксиомы
Нормы Геометрическая |
Аксиомы
метрического пространства
Векторное
пространство
называется
метрическим,
если задано некоторое правило, по
которому каждой паре векторов
![]()
ставится в соответствие некоторое число
![]()
.
Оно должно удовлетворять 3 аксиомам:
1.
![]()
для всех
![]()
и
![]()
при
![]()
.
2.
![]()
для всех
;
3.
![]()
для всех
![]()
.
Это
число
,
где
![]()
и
![]()
,
называется расстоянием
между векторами
или нормой,
а правило (функция двух векторов, формула)
– метрикой.
Метрику можно ввести по-разному. Докажем,
что векторное пространство
станет
метрическим, если для любых x
и y
из
положить
![]()
.
Покажем,
что выполняются аксиомы метрики.
Действительно, из свойств нормы вытекает,
что
-

,
причемтогда
и только тогда, когда

. -

. -


.
Нормы
метрического пространства
Модуль
разности векторов может быть вычислен
в координатах по-разному (разные нормы).
В экономике наиболее распространены
следующие:
-
евклидова
норма:
.
В
частном случае расстояние между вектором
и нулевым вектором
![]()
есть норма вектора
![]()
=![]()
.
-
октаэдрическая
норма:

.
Норма
вектора в векторном пространстве с
октаэдрической нормой есть величина
=![]()
.
-
кубическая
норма:

.
Норма
вектора
вычисляется по формуле
=![]()
.
Задавая
по-разному модуль разности векторов в
координатах, мы должны убедиться в том,
что аксиомы метрики не нарушены. Проверим
справедливость аксиом на примере
евклидовой нормы.
-
Очевидно

,
причем
при

. -

3.
Аксиома
для метрики

имеет вид

![]()
.
Пусть
![]()
и
![]()
.
Тогда получим неравенство
![]()
,
которое
называется неравенством
треугольника.
Докажем его.
Запишем
неравенство в координатной форме
![]()
.
Для
доказательства возведем обе части в
квадрат и раскроем скобки. После упрощения
получим неравенство в координатах,
называемое неравенством
Коши-Буняковского

.
Докажем
его справедливость. Рассмотрим очевидное
неравенство
![]()
,
г
де
параметр
![]()
.
Раскрыв скобки, приведем его к квадратному
неравенству относительно
![]()
.
![]()
.
Поскольку
неравенство выполняется при всех
,
его дискриминант не положителен (![]()
)
,
о
ткуда
получаем неравенство Коши-Буняковского.
Доказательство закончено.
Все
аксиомы проверены.
Геометрическая
интерпретация норм
Дадим
геометрическую интерпретацию каждой
нормы при
![]()
и
![]()
.
Для
евклидовой нормы величина
![]()
есть
расстояние между концами векторов
![]()
и
![]()
,
указанное пунктирной линией (рис. 4.6).
Эта величина соответствует расстоянию
между двумя точками на плоскости в нашем
физическом пространстве.
Октаэдрическая
норма устанавливает расстояние между
концами векторов
![]()
, (10)
п

оказанное
пунктирной линией на рис. 4.7. Наглядно
представить себе это расстояние можно
следующим образом. Представим себе, что
мы находимся в той части города, где
улицы пересекаются под прямыми углами
(рис. 4.8). Расстояние от А
до В
мы можем пройти, двигаясь по улицам, по
траектории АСВ
или, например, по траектории АDВ.
Но не можем пройти по траектории АВ.
Для нас расстояние от точки А
до точки В
вычисляется по формуле (10).
Расстояние,
определяемое кубической нормой
![]()
,
представлено
на рис. 4.9 пунктирной линией. Дадим
экономическую интерпретацию
этой нормы. Если вы можете заработать
![]()
ден. единиц, но обязаны израсходовать
![]()
ден. единиц, или, заработав
ден. единиц, израсходуете при этом
![]()
ден. единиц, ваш потребительский выбор,
нацеленный на наибольшую выгоду, будет
таким: максимум из двух величин
![]()
или
![]()
.
ПРИМЕР.
Метрика линейного векторного пространства
![]()
задается правилом
![]()
.
На координатной плоскости изобразить
множество точек, для которых
![]()
,
если в метрическом пространстве принята
1. евклидова норма; 2. октаэдрическая
норма; 3. кубическая норма. Ограничиться
рассмотрением случая
![]()
.
Решение.
В двумерном векторном пространстве
![]()
с евклидовой нормой и
уравнение
имеет вид
![]()
или
![]()
,
с октаэдрической нормой —
![]()
,
с кубической нормой —
![]()
.
На координатной плоскости
![]()
построим
соответствующие графики (рис. 4.10)

Д
ля
понимания того, как выглядит объемное
тело, если расстояния измерять, пользуясь
разными нормами, введем понятие
математического шара в метрическом
пространстве. Математическим
шаром
с центром в точке
![]()
и радиусом
в трехмерном метрическом пространстве
назовем множество
![]()
.
В
метрическом евклидовом пространстве
это неравенство имеет вид
![]()
и
представляет собой знакомый нам
геометрический шар. Евклидова норма
при
описывает наше физическое трехмерное
пространство.
В
линейном векторном пространстве с
октаэдрической нормой математический
шар
![]()
является
более сложной фигурой. Изобразим ее на
рис. 4.11, взяв центром точку
![]()
и радиусом
![]()
.
Это октаэдр (восьмигранник). Поэтому и
норма названа октаэдрической.
Математический
шар в линейном векторном пространстве
с кубической нормой
![]()
представляет
собой куб, отсюда название нормы.
Линейные многообразия: определение и примеры
Определение линейного многообразия
Пусть подпространство линейного пространства
, а
— некоторый вектор. Множество векторов
, представимых в виде
, где
, называется линейным многообразием, проходящим через вектор
параллельно подпространству
, и обозначается
(8.22)
Говорят также, что линейное многообразие получено параллельным сдвигом подпространства на вектор
, а подпространство
называют однородной частью линейного многообразия
. Размерностью линейного многообразия называют размерность его однородной части, т.е.
. B n-мерном линейном пространстве (n-l)-мерное линейное многообразие называется гиперплоскостью. Обратим внимание на то, что раз мерность многообразия равна максимальному числу линейно независимых векторов не самого многообразия, а его однородной части.
Примеры линейных многообразий
1. Любое подпространство является линейным многообразием
, где
— нулевой вектор.
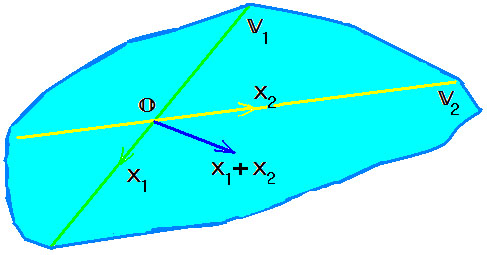
2. В пространстве (радиус-векторов с общим началом в точке
) рассмотрим плоскость
, проходящую через точку
(рис.8.3) и плоскость
, проходящую через конец вектора
параллельно плоскости
.
Любой вектор , конец которого принадлежит плоскости
, можно пред ставить в виде
, где
— вектор, принадлежащий плоскости
. Следовательно, множество радиус-векторов, концы которых принадлежат плоскости
, это линейное многообразие
. Его размерность равна 2, так как
(базисом
являются любые два неколлинеарных вектора, принадлежащие
, например, векторы
и
). Заметим, что вектор
в многообразии
можно заменить любым радиус-вектором
, конец которого принадлежит плоскости
, т.е.
.
Свойства линейных многообразий
1. Линейное многообразие, параллельное линейному подпространству , однозначно определяется любым своим вектором, другими словами, если
, то
.
2. Непустое пересечение линейных многообразий является линейным многообразием, другими словами, если , то
, т.е. однородная часть пересечения совпадает с пересечением однородных частей многообразий, а вектор, определяющий сдвиг — это любой вектор пересечения многообразий.
3. Любое r-мерное линейное многообразие можно представить как аффинную оболочку не более, чем векторов.
В самом деле, пусть — r-мерное линейное многообразие, т.е.
. Выберем базис
подпространства
и образуем
векторов
линейного многообразия
. Покажем, что
. Действительно, любой вектор
можно представить в виде
. Преобразуем это выражение, подставляя
Получили аффинную комбинацию векторов , так как сумма коэффициентов равна единице. Следовательно,
.
Пусть теперь . Тогда
, причем
. Подставляя
, получаем:
то есть . Следовательно,
.
Из двух включений получаем равенство . Из доказательства следует, что
(8.23)
4. Аффинная оболочка непустого подмножества конечномерного пространства является линейным многообразием.
Взаимное расположение линейных многообразий
Линейные многообразия обобщают обычные объекты стереометрии -прямые и плоскости. Следующие признаки и определения обобщают известные стереометрические свойства, характеризующие взаимное расположение прямых и плоскостей. Геометрическая терминология естественно применяется для многообразий. Говорят, что одно линейное многообразие лежит в другом, если первое многообразие является подмножеством второго. Пересечение или объединение линейных многообразий понимается как пересечение или объединение множеств векторов. Говорят, что линейные многообразия не пересекаются, если у них нет общих векторов, т.е. пересечение этих множеств пусто.
Приведем признаки включения и равенства (совпадения) линейных многообразий:
1) линейное многообразие лежит в линейном многообразии
тогда и только тогда, когда
и
;
2) линейные многообразия и
совпадают тогда и толь ко тогда, когда
и
.
Два непересекающихся линейных многообразия и
называются параллельными, если одно из подпространств
или
лежит в другом:
или
(иными словами, если одна из однородных частей содержится в другой).
Два непересекающихся линейных многообразия и
называются скрещивающимися, если пересечение подпространств
и
есть нулевой вектор:
.
Способы описания линейных многообразий
Для линейных подпространств рассматривались два способа описания: внутренний (при помощи линейных оболочек) и внешний (при помощи однородной системы уравнений). Свойства 3, 4 определяют внутреннее описание линейных многообразий при помощи аффинных оболочек векторов. Внешнее описание линейных многообразий задается неоднородной системой линейных уравнений. Действительно, множество решений будем рассматривать как подмножество я -мерного арифметического пространства
. Структура общего решения неоднородной системы:
где — частное решение неоднородной системы,
— фундаментальная система решений соответствующей однородной системы
— произвольные постоянные,
— ранг матрицы системы. Как показано ранее, множество
решений однородной системы является линейным подпространством
, а именно
. Следовательно, множество
решений неоднородной системы является линейным многообразием в
(8.24)
В частности, множество решений одного уравнения с ненулевыми коэффициентами (хотя бы один коэффициент при неизвестных отличен от нуля), представляет собой гиперплоскость, т.е. линейное многообразие размерности
, так как размерность
его однородной части
равна
, поскольку
. Поэтому множество решений системы
линейных уравнений можно представить как пересечение
гиперплоскостей. По свойству 2 пересечение линейных многообразий есть линейное многообразие.
Равенство (8.24) определяет переход от внешнего описания линейного многообразия (левая часть) к внутреннему описанию (правая часть). Рас смотрим обратный переход: от внутреннего описания к внешнему.
Пусть дано линейное многообразие . Требуется составить неоднородную систему уравнений, множество решений которой совпадало бы с заданным многообразием. Учитывая, что разность двух решений неоднородной системы является решением однородной системы, используем переход от внутреннего описания линейного подпространства к внешнему. Для нахождения неоднородной системы нужно выполнить следующие действия.
1. Из данных столбцов составить матрицу размеров
, а затем блочную матрицу
, приписав к матрице
единичную матрицу
n-го порядка.
2. Элементарными преобразованиями над строками блочной матрицы и первыми ее столбцами привести матрицу
к виду
, где
— простейший вид матрицы
.
3. Из последних строк матрицы
составить матрицу
.
4. Записать искомую систему уравнений в форме .
Пример 8.14. Многообразие задано аффинной оболочкой векторов
где
Составить систему неоднородных уравнений, задающую это же многообразие.
Решение. Согласно (8.23), зададим линейное многообразие в форме .
1. Из данных столбцов составляем матрицу , а затем блочную матрицу
2. Элементарными преобразованиями над строками блочной матрицы и над ее первыми тремя столбцами приводим левый блок к простейшему виду. Прибавляем ко второй и последней строке первую, умноженную на (-1), затем меняем местами вторую и третью строки:
Прибавим ко второму и третьему столбцам первый, умноженный на (-1), а затем к третьему столбцу — второй, умноженный на (-2). При этом в левом блоке получим простейший вид матрицы
(ее ранг
), а правый блок матрицы не изменится:
3. Из последних строк матрицы
составляем матрицу
4. Записываем искомую систему уравнений в форме
Пример 8.15. Найти размерность пересечения многообразий и
, если
— многообразие, заданное в примере 8.14 аффинной оболочкой век торов, а многообразие
— множество решений неоднородной системы
Решение. В примере 8.14 найдена система неоднородных уравнений, описывающая многообразие
Составляя из систем
и
одну систему, получаем внешнее описание пересечения многообразий:
. Найдем множество решений этой системы. Составляем матрицу системы и приводим ее к ступенчатому виду:
Система имеет единственное решение . Следовательно, пересечение многообразий состоит из одного вектора. Поскольку однороная часть пересечения представлена нулевым пространством, то
.
Пример 8.16. Исследовать взаимное расположение многообразий и
, если
— многообразие, заданное в примере 8.14 аффинной оболочкой векторов,
— многообразие, заданное в примере 8.15 неоднородной системой уравнений, а многообразие
— проходит через вектор
параллельно линейной оболочке вектора
.
Решение. В примере 8.15 показано, что многообразия и
пересекаются и
,
.
Найдем пересечения многообразия с многообразиями
и
. Любой вектор из
имеет вид
, где параметр
. Подставим выражения для координат этого вектора в системы, описывающие многообразия
и
(система для многообразия
получена в примере 8.14):
Каждая из систем несовместна. Следовательно, многообразие не пересекает многообразий
и
.
Найдем пересечение однородной части с однородными частями
и
. Однородная часть
задана линейной оболочкой
. Однородную часть
находим по правилу (8.23):
Так как , то справедливо включение
Поскольку однородная часть многообразия содержится в однородной части многообразия
, то, согласно определению, многообразия
и
параллельны.
Однородную часть определяем, используя структуру общего решения неоднородной системы (она была найдена при решении примера 5.5):
где — произвольные постоянные. По правилу (8.24)
. Найдем пересечение подпространств
и
. Для этого составляем матрицу
и приводим ее к ступенчатому виду
Поскольку , то размерность пересечения равна нулю:
. Так как
и многообразия
и
не пересекаются, то они скрещивающиеся.
Математический форум (помощь с решением задач, обсуждение вопросов по математике).
Если заметили ошибку, опечатку или есть предложения, напишите в комментариях.
Содержание
Благодарю Ю.А.Смолькина за обнаружение 07.08.19 ошибки на настоящей странице и информирование о ней.
Линейное пространство
Определения
Пусть дано множество $ mathbb V_{}=left{ X,Y,Z,U,dots right} $
элементов произвольной природы. Пусть для элементов этого множества определены
две операции: сложения $ X+Y_{} $ и умножения на любое вещественное число $ alpha_{} $:
$ alpha cdot X_{} $, и множество $ mathbb V_{} $ замкнуто относительно этих операций:
$ X+Y in mathbb V , alpha cdot X in mathbb V_{} $. Пусть эти операции подчиняются
аксиомам:
1.
$ X+Y=Y+X_{} $ для $ { X,, Y} subset mathbb V_{} $;
2.
$ (X+Y)+Z_{}=X+(Y+Z) $ для $ { X,, Y,, Z } subset mathbb V_{} $;
3.
в $ mathbb V_{} $ cуществует нулевой вектор $ mathbb O_{} $ со свойством $ X+ mathbb O =X_{} $ для $ forall Xin mathbb V_{} $;
4.
для каждого $ Xin mathbb V_{} $ существует обратный вектор $ X^{prime}in mathbb V_{} $ со свойством $ X+X^{prime}=mathbb O_{} $;
5.
$ 1cdot X=X_{} $ для $ forall Xin mathbb V_{} $;
6.
$ lambda left(mu X right)_{}= left(lambda mu right)X $ для $ forall Xin mathbb V_{} $, $ {lambda ,, mu } subset mathbb R_{} $ ;
7.
$ (lambda + mu)X=lambda X + mu X_{} $ для $ forall Xin mathbb V_{} $, $ {lambda ,, mu }subset mathbb R_{} $ ;
8.
$ lambda (X + Y) =lambda X_{} + lambda Y $ для $ { X,, Y} subset mathbb V_{} ,
lambda in mathbb R $.
Тогда такое множество $ mathbb V_{} $ называется линейным (векторным) пространством,
его элементы называются векторами, и — чтобы подчеркнуть их отличие от
чисел из $ mathbb R_{} $ — последние называются скалярами1).
Пространство, состоящее из одного только нулевого вектора, называется тривиальным .
Если в аксиомах
6
—
8
допустить умножение и на комплексные скаляры, то такое линейное пространство называется комплексным. Для упрощения рассуждений в настоящем разделе будут рассматриваться только вещественные пространства.
Линейное пространство является группой относительно операции сложения, причем группой абелевой.
Элементарно доказывается единственность нулевого вектора, и единственность
вектора, обратного вектору $ Xin mathbb V_{} $: $ X^{prime}=-1cdot X_{} $, его привычно обозначают $ — X_{} $.
Подмножество $ mathbb V_{1} $ линейного пространства $ mathbb V_{} $, само являющееся линейным
пространством (т.е. $ mathbb V_{1} $ замкнуто относительно сложения векторов и умножения на произвольный скаляр), называется линейным подпространством пространства $ mathbb V_{} $. Тривиальными подпространствами линейного пространства $ mathbb V_{} $
называются само $ mathbb V_{} $ и пространство, состоящее из одного нулевого вектора
$ mathbb O_{} $.
Примеры линейных пространств
П
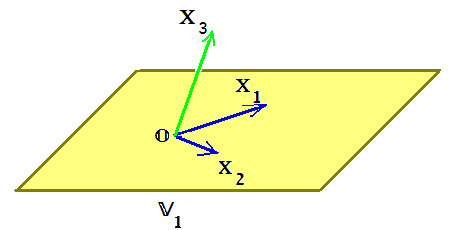
Пример 1. Пространство $ mathbb R^{3} $ упорядоченных троек вещественных чисел $ (a_1,a_2,a_{3}) $ с операциями, определяемыми равенствами:
$$ (a_1,a_2,a_3)+(b_1,b_2,b_3)= (a_1+b_1,a_2+b_2,a_3+b_3),
alpha (a_1,a_2,a_3) = ( alpha a_1, alpha a_2, alpha a_3 ) .
$$
Геометрическая интерпретация очевидна: вектор в пространстве, «привязанный» к началу координат, может быть задан координатами своего конца $ (a_1,a_2,a_{3}) $. На рисунке показано и типичное подпространство пространства $ mathbb R^{3} $: плоскость, проходящая через начало координат.
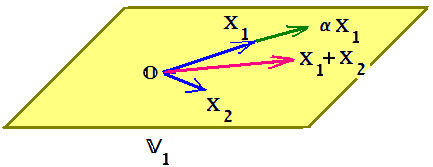
Точнее говоря, элементами $ mathbb V_1 $ являются векторы, имеющие начало в начале координат и концы — в точках плоскости. Замкнутость такого множества относительно сложения векторов и их растяжения2) очевидна.
Исходя из этой геометрической интерпретации, часто говорят о векторе $ X_{} $ произвольного линейного пространства $ mathbb V_{} $ как о точке пространства $ mathbb V_{} $. Иногда эту точку
называют «концом вектора $ X_{} $». Кроме удобства ассоциативного восприятия, этим словам не придается никакого формального смысла: понятие «конец вектора» отсутствует в аксиоматике линейного пространства.
П
Пример 2. Основываясь на том же примере, можно дать и иную интерпретацию векторного пространства $ mathbb V_1 $ (заложенную, кстати, уже в самом происхождении слова «вектор»3))
— оно определяет набор «сдвигов» точек пространства $ mathbb R^{3} $. Эти сдвиги — или параллельные переносы любой пространственной фигуры — выбираются параллельными плоскости $ mathbb V_1 $.
Вообще говоря, с подобными интерпретациями понятия вектора все обстоит не так просто. Попытки аппелировать к его физическому смыслу — как к объекту, имеющему величину и направление — вызывают справедливую отповедь строгих математиков.
Определение же вектора как элемента векторного пространства очень напоминает эпизод с сепульками из знаменитого фантастического рассказа Станислава Лема (см.
☞
ЗДЕСЬ ). Не будем зацикливаться на формализме, а исследуем этот нечеткий объект в его частных проявлениях.
П
Пример 3. Естественным обобщением пространства $ mathbb R^{3} $ служит пространство $ mathbb R_{}^{n} $ —
векторное пространство строк $ (x_1,dots,x_{n}) $ или столбцов
$ (x_1,dots,x_n)^{^top} $. Один из способов задания подпространства
в $ mathbb R_{}^{n} $ — задание набора ограничений. Множество решений системы линейных однородных уравнений:
$$
left{begin{array}{ccc}
a_{11}x_1 +a_{12}x_2+ldots+a_{1n}x_n &=&0,\
a_{21}x_1 +a_{22}x_2+ldots+a_{2n}x_n &=&0,\
ldots& & ldots \
a_{m1}x_1 +a_{m2}x_2+ldots+a_{mn}x_n &=&0
end{array}right.
iff
AX=mathbb O
$$
образует линейное подпространство пространства $ mathbb R_{}^{n} $. В самом деле, если
$$x_1=alpha_1,dots, x_n=alpha_n $$
— решение системы, то и
$$x_1=t alpha_1,dots, x_n= t alpha_n $$
— тоже решение при любом $ t in mathbb R $. Если
$$x_1=beta_1,dots, x_n=beta_n $$
— еще одно решение системы, то и
$$x_1=alpha_1+beta_1,dots,x_n=alpha_n+beta_n $$
— тоже будет ее решением.
?
Почему множество решений системы неоднородных уравнений не образует линейного подпространства?
П
Пример 4. Обобщая далее, можем рассмотреть пространство «бесконечных» строк или последовательностей
$$ (x_1,dots,x_n, dots ) , , $$
обычно являющееся объектом математического анализа — при рассмотрении последовательностей и рядов. Подпространство этого пространства образуют, например, линейные рекуррентные последовательности $ {x_k}_{k=0,1,2,dots } $ удовлетворяющие — при произвольных числах $ {x_0,dots x_{n-1} } subset mathbb R $ — линейному однородному разностному уравнению $ n_{} $-го порядка,
$$
x_{n+K}=a_1 x_{n+K-1}+ dots+ a_n x_K npu K in {0,1,2,dots } ;
$$
здесь числа $ { a_1,dots,a_{n-1}, a_n ne 0 } subset mathbb R $ считаются фиксированными.
Можно рассматривать строки (последовательности) «бесконечные в обе стороны» $ { dots,x_{-2},x_{-1},x_0,x_1,x_2,dots } $ — они используются в ТЕОРИИ СИГНАЛОВ.
П
Пример 5. Множество $ mtimes n_{} $-матриц с вещественными элементами с операциями сложения матриц и умножения на вещественные числа образует линейное пространство. Будем обозначать это пространство $ mathbb R^{mtimes n} $.
В пространстве квадратных матриц
фиксированного порядка каждое из следующих подмножеств составляет линейное подпространство:
симметричных, кососимметричных, верхнетреугольных, нижнетреугольных и диагональных матриц.
П
Пример 6. Множество полиномов одной переменной $ x_{} $ степени в точности равной $ n_{} $ с коэффициентами из $ mathbb A_{} $ (где $ mathbb A_{} $ — любое из множеств $ mathbb Z, mathbb Q, mathbb R_{} $ или $ mathbb C_{} $) с обычными операциями сложения полиномов и умножения на число из $ mathbb A_{} $
не образует линейного пространства. Почему? — Потому что оно не является замкнутым относительно сложения: сумма полиномов
$$ f(x)=x^n -x+1 quad mbox{ и } quad g(x)=-x^n+x^{n-1}-2 $$
не является полиномом $ n_{} $-й степени. Но вот множество полиномов степени
не выше $ n_{} $ $$ mathbb P_n= left{ p(x) in mathbb A [x] big| deg p(x) le n right} $$
линейное пространство образует; только к этому множеству надо придать еще и тождественно нулевой полином4). Очевидными подпространствами $ mathbb P_{n} $ являются $ mathbb P_{0}, mathbb P_1,dots,mathbb P_{n-1} $. Кроме того, подпространствами будут множество четных и множество нечетных полиномов степени не выше $ n_{} $. Множество всевозможных полиномов
$$
mathbb P= bigcup_{n=0}^{infty} mathbb P_n
$$
(без ограничения на степени) тоже образует линейное пространство.
П
Пример 7. Обобщением предыдущего случая будет пространство полиномов нескольких переменных $ x_1,dots, x_{ell} $ степени не выше $ n_{} $ с коэффициентами из $ mathbb A_{} $. Например, множество линейных полиномов
$$ left{ a_1x_1+dots+a_{ell}x_{ell}+b big| (a_1,dots,a_{ell},b) in mathbb A^{ell+1} right} $$
образует линейное пространство. Множество однородных полиномов (форм) степени $ n_{} $ (с присоединением к этому множеству тождественно нулевого полинома) — также линейное пространство.
С точки зрения приведенного в предыдущем пункте определения, множество строк с целочисленными компонентами
$$ mathbb Z^n = left{ (x_1,dots,x_n) mid {x_j}_{j=1}^n subset mathbb Z right} , $$
рассматриваемое относительно операций покомпонентного сложения и умножения на целочисленные скаляры, не является линейным пространством. Тем не менее, все аксиомы
1
—
8
будут выполнены если мы допустим умножение только на целочисленные скаляры. В настоящем разделе мы не будем акцентировать внимание на этом объекте, но он довольно полезен в дискретной математике, например в
☞
ТЕОРИИ КОДИРОВАНИЯ. Линейные пространства над конечными полями рассматриваются
☞
ЗДЕСЬ.
Изоморфизм
Пусть имеются два линейных пространства разной природы: $ mathbb V_{} $ с операцией $ +_{} $ и $ mathbb W_{} $
с операцией $ boxplus_{} $. Может оказаться так, что эти пространства «очень похожи», и свойства одного получаются простым «переводом» свойств другого.
Говорят, что пространства $ mathbb V_{} $ и $ mathbb W_{} $ изоморфны если между множествами их элементов можно установить такое взаимно-однозначное соответствие, что если $ X_{} leftrightarrow X^{prime} $ и $ Y_{} leftrightarrow Y^{prime} $ то $ X+Y leftrightarrow X_{}^{prime} boxplus Y^{prime} $ и
$ lambda X_{} leftrightarrow lambda X^{prime} $.
=>
При изоморфизме пространств $ mathbb V_{} $ и $ mathbb W_{} $ нулевому вектору одного пространства будет соответствовать нулевой вектор другого пространства.
П
Пример. Пространство $ mathbb R^{n}_{} $ изоморфно пространству $ mathbb P_{n-1}^{} $.
В самом деле, изоморфизм устанавливается соответствием
$$ [a_1,dots,a_n] leftrightarrow a_1+a_2x+dots + a_nx^{n-1} .$$
П
Пример. Пространство $ mathbb R^{mtimes n} $ вещественных матриц порядка $ m_{}times n $ изоморфно пространству
$ mathbb R_{}^{mn} $. Изоморфизм устанавливается с помощью операции векторизации матрицы
(матрица «вытягивается» в один столбец).
П
Пример. Пространство квадратичных форм от $ n_{} $ переменных изоморфно пространству симметричных матриц $ n_{} $-го порядка. Изоморфизм устанавливается соответствием, которое мы проиллюстрируем для случая $ n=3_{} $:
$$
a_{11}x_1^2+a_{12}x_1x_2+a_{13}x_1x_3+a_{22}x_2^2+a_{23}x_2x_3+a_{33}x_3^2 leftrightarrow
left(
begin{array}{ccc}
a_{11} & frac{1}{2}a_{12} & frac{1}{2}a_{13} \
frac{1}{2}a_{12} & a_{22} & frac{1}{2}a_{23} \
frac{1}{2}a_{13} & frac{1}{2}a_{23} & a_{33}
end{array}
right) .
$$
Понятие изоморфизма вводится для того, чтобы исследование объектов, возникающих в различных областях алгебры, но с «похожими» свойствами операций, вести на примере одного образца, отрабатывая на нем результаты, которые можно будет потом дешево тиражировать. Какое именно линейное пространство взять «за образец»? — См. концовку следующего пункта.
Линейная зависимость, базис, координаты
Линейной комбинацией системы векторов $ {X_1,dots,X_{m}} $ называется произвольный вектор
$$ alpha_1 X_1+dots+ alpha_m X_m $$
при каких-то фиксированных значениях скаляров $ alpha_{1}, dots, alpha_{m} $.
Множество всевозможных линейных комбинаций системы векторов $ {X_1,dots,X_{m}} $
$$
left{ alpha_1 X_1+dots+ alpha_m X_m bigg| {alpha_1,dots,alpha_m}subset mathbb R right}
$$
называется линейной оболочкой векторов $ X_1,dots,X_{m} $ и обозначается $ {mathcal L}(X_1,dots,X_{m}) $.
Т
Теорема 1. Линейная оболочка векторов $ X_1,dots,X_{m} $ образует линейное подпространство пространства $ mathbb V_{} $.
П
Пример. В пространстве $ mathbb P_{n} $ полиномов степеней $ le n_{} ge 3 $ линейной оболочкой полиномов $ x,x^2,x^3 $ будет множество полиномов вида
$ a_0x^3+a_1x^2+a_2x $, т.е. множество полиномов степеней $ le 3 $, имеющих корень $ lambda_{}=0 $.
♦
Система векторов $ { X_{1},dots,X_m } $
называется линейно зависимой (л.з.) если существуют числа $ alpha_{1},dots,alpha_m $, такие что хотя бы одно из них отлично от нуля и
$$
alpha_1X_1+dots+alpha_mX_m=mathbb O
$$
Если же это равенство возможно только при $ alpha_{1}=0,dots,alpha_m=0 $,
то система векторов называется линейно независимой (л.н.з.).
П
Пример. Для полиномов нескольких переменных свойство линейной зависимости является частным проявлением более общего свойства функциональной зависимости. Так, однородные полиномы (формы)
$$ f_1=(x_1+x_2+x_3)^2,quad f_2=x_1x_2+x_1x_3+x_2x_3,quad f_3=x_1^2+x_2^2+x_3^2 $$
являются линейно зависимыми, поскольку
$$ f_1-2,f_2-f_3 equiv 0 . $$
Полиномы
$$ tilde f_1=x_1+x_2+x_3,quad f_2=x_1x_2+x_1x_3+x_2x_3,quad f_3=x_1^2+x_2^2+x_3^2 $$
не являются линейно зависимыми, но являются функционально зависимыми, поскольку
$$ tilde f_1^2-2,f_2-f_3 equiv 0 . $$
♦
Т
Теорема 2. а) Если система содержит хотя бы один нулевой вектор, то она л.з.
б) Если система л.н.з., то и любая ее подсистема л.н.з.
в) При $ m>1 $ система $ {X_{1},dots,X_m} $ л.з. тогда и только тогда,
когда по меньшей мере один ее вектор линейно выражается через остальные,
т.е. существуют $ jin {1,dots,n } $ и константы $ gamma_{1},dots,gamma_{j-1},
gamma_{j+1},dots,gamma_{n} $ такие, что
$$ X_j=gamma_1X_1+dots+gamma_{j-1}X_{j-1}+ gamma_{j+1}X_{j+1}+dots + gamma_{m}X_{m} .$$
Т
Теорема 3. Если каждый из векторов системы $ { X_1,dots,X_{m} } $ линейно выражается через векторы другой системы $ { B_{1},dots,B_k } $ с меньшим числом векторов: $ k<m $, то система $ { X_{1},dots,X_m } $ будет л.з.
Доказательство аналогично приведенному
☞
ЗДЕСЬ.
Две системы векторов называются эквивалентными если каждый вектор одной системы линейно выражается через векторы другой и обратно.
Т
Теорема 4. Системы векторов
$$ { X_1,dots,X_{m} } quad mbox{ и } quad { Y_{1},dots,Y_k } $$
будут эквивалентными тогда и только тогда когда совпадают линейные оболочки этих систем:
$${mathcal L}(X_1,dots,X_m)={mathcal L}(Y_1,dots,Y_k) . $$
Т
Теорема 5. Если каждая из двух эквивалентных систем
$$ { X_1,dots,X_{m} } quad mbox{ и } quad { Y_{1},dots,Y_k } $$
является л.н.з., то эти системы состоят из одинакового числа векторов: $ m=k_{} $ .
Линейно независимая система векторов $ {X_{j}}subset mathbb V $ называется базисом этого пространства если каждый $ Xin mathbb V $
можно представить в виде линейной комбинации указанных векторов:
$$
X=sum_{j} alpha_j X_j .
$$
При этом не подразумевается конечность системы, т.е. суммирование может распространяться на бесконечное число слагаемых. Так, например, пространство бесконечных строк (или последовательностей) $ left[a_{1},a_2,dots, right] $ имеет бесконечный базис, состоящий из векторов
$$ [underbrace{0,dots,0,1}_j,0,dots , ] quad npu j in mathbb N . $$
В случае, когда базис пространства $ mathbb V_{} $ конечен,
пространство $ mathbb V_{} $ называется конечномерным, а число векторов
базиса тогда называется размерностью пространства $ mathbb V_{} $ и
обозначается5): $ dim mathbb V_{} $. Также полагают, что размерность тривиального пространства, состоящего из одного только нулевого вектора, равна нулю: $ dim {mathbb O_{} }= 0 $.
П
Пример. Линейное пространство $ mtimes n_{} $ матриц имеет размерность $ mn_{} $. Так, для случая $ m_{}=3 ,n=2 $ в качестве базиса можно выбрать следующий набор матриц
$$
left(
begin{array}{cc}
1 & 0 \
0 & 0 \
0 & 0
end{array}
right) ,
left(
begin{array}{cc}
0 & 1 \
0 & 0 \
0 & 0
end{array}
right) ,
left(
begin{array}{ccccc}
0 & 0 \
1 & 0 \
0 & 0 end{array}
right) ,
left(
begin{array}{cc}
0 & 0 \
0 & 1 \
0 & 0 end{array}
right) ,
left(
begin{array}{cc}
0 & 0 \
0 & 0 \
1 & 0
end{array}
right) ,
left(
begin{array}{cc}
0 & 0 \
0 & 0 \
0 & 1
end{array}
right) .
$$
♦
?
Найти размерности подпространства симметричных и подпространства кососимметричных матриц порядка $ n_{} $.
П
Пример [1]. Замечательный пример трехмерного линейного пространства дает нам совокупность всех цветов. Под суммой двух цветов будем понимать цвет, образованный их смешением
под умножением цвета на положительное число $ k_{} $ — увеличение в $ k_{} $ раз яркости цвета
A
Анимация
☞
ЗДЕСЬ (1500 K, gif)
под умножением на $ (-1) $ — взятие дополнительного цвета. При этом оказывается, что совокупность всех цветов выражается линейно через три цвета: красный, зеленый и синий, т.е. образует трехмерное линейное пространство. (Точнее, некоторое тело в трехмерном пространстве, поскольку яркости цветов ограничены верхним порогом раздражения.) Исследование этого трехмерного тела всех цветов является важным орудием цветоведения.
♦
Если $ dim mathbb V=d_{} $ и вектора $ X_1,dots,X_{d} $ являются базисными для $ mathbb V_{} $, то разложение вектора $ X in mathbb V_{} $ в сумму:
$$ X=alpha_1 X_1+dots+ alpha_d X_d .$$
называется разложением вектора $ X_{} $ по базису $ X_1,dots,X_{d} $; при этом числа $ alpha_1,dots, alpha_{d} $ называются координатами вектора $ X_{} $
в данном базисе.
Т
Теорема 6. Если $ dim mathbb V=d>0 $, то любая система из $ d_{} $ линейно независимых векторов пространства образует базис этого пространства.
Доказательство. Пусть $ {Y_1,dots,Y_d} $ — л.н.з. система. Рассмотрим произвольный
$ Xin mathbb V_{} $. Если система $ {X,Y_1,dots,Y_d} $ л.н.з., то
$ dim mathbb V ge d+1 $, что противоречит условию теоремы. Следовательно, система линейно
зависима: $ alpha_0X+alpha_1Y_1+dots+alpha_dY_d=mathbb O $ при каком-то из чисел
$ {alpha_j}_{j=0}^{d} $ не равном нулю. Если $ alpha_0=0 $, то $ alpha_1Y_1+dots+alpha_dY_d=mathbb O $
при каком-то ненулевом коэффициенте. Это означает, что система
$ {Y_1,dots,Y_d} $ линейно зависима, что противоречит предположению.
Следовательно $ alpha_0ne 0 $, но тогда вектор $ X_{} $ может быть представлен
в виде линейной комбинации векторов $ Y_1,dots,Y_d $:
$$X=- {alpha_1}/{alpha_0} Y_1-dots -{alpha_d}/{alpha_0}Y_d .$$
По определению, система $ {Y_1,dots,Y_d} $ является базисом $ mathbb V $.
♦
Т
Теорема 7. Любой вектор $ X in mathbb V_{} $ может быть разложен по фиксированному базису пространства единственным образом.
Очевидно, $ dim mathbb R^{n} = n $: строки из $ n_{} $ элементов
$$[1,0,0,dots,0], [0,1,0,dots,0], [0,0,1,dots,0], dots , [0,0,0,dots,1]
$$
образуют базис этого пространства.
Имеются два способа задания линейных подпространств в $ mathbb R^{n}_{} $. Пусть
$$ mathbb V_1 = {mathcal L}(A_1,dots,A_k) quad npu {A_1,dots,A_k }
subset mathbb R^n .$$
В разделе
☞
РАНГ установлено, что
$$ dim mathbb V_1 = operatorname{rank} { A_1,dots,A_k } = operatorname{rank} (A) ,$$
где $ A_{} $ — матрица, составленная из строк (столбцов) $ A_{1},dots,A_k $.
П
Пример. Найти базис подпространства
$$mathcal L left([1,2,1,1],, [-1,0,-1,0], , [-1,2,-1,1], , [0,1,0,1] right)
.$$
Решение. Ищем
$$
operatorname{rank}
left(
begin{array}{rrrr}
1 & 2 & 1 & 1 \
-1&0&-1&0 \
-1& 2 &-1 &1 \
0& 1& 0 & 1
end{array}
right)
$$
по методу окаймляющих миноров. Существует минор третьего порядка
$$
left|
begin{array}{rrrr}
1 & 2 & 1 \
-1&0&0 \
0& 1 & 1
end{array}
right|
$$
отличный от нуля, а определитель самой матрицы равен нулю. Замечаем,
что найденный отличный от нуля минор расположен в первой, второй и
четвертой строках матрицы. Именно эти строки и образуют базис.
Ответ. Базис составляют, например, первая, вторая и четвертая строки.
Другим способом задания линейного подпространства в $ mathbb R^{n} $ может служить
задание набора ограничений, которым должны удовлетворять векторы
подпространства. Таким набором ограничений может являться, например,
система уравнений
$$
left{begin{array}{ccc}
a_{11}x_1 +a_{12}x_2+ldots+a_{1n}x_n &=&0,\
a_{21}x_1 +a_{22}x_2+ldots+a_{2n}x_n &=&0,\
ldots& & ldots \
a_{m1}x_1 +a_{m2}x_2+ldots+a_{mn}x_n &=&0
end{array}right. qquad iff qquad AX=mathbb O .
$$
Какова размерность подпространства решений этой системы?
На этот вопрос мы ответим сразу же,
если вспомним определение фундаментальной системы решений (ФСР).
Именно, ФСР — как набор линейно независимых
решений, через которые линейно выражается любое решение системы однородных уравнений — является базисом подпространства этих решений.
Т
Теорема 8. Множество решений системы однородных уравнений $ AX=mathbb O_{} $ образует линейное подпространство пространства $ mathbb R^{n} $. Размерность этого подпространства равна $ n-operatorname{rank} (A) $, а фундаментальная система решений образует его базис.
П
Пример. В пространстве $ mathbb P_{n} $ полиномов степеней $ le n_{} $ каноническим базисом можно взять систему мономов $ {1,x,x^2,dots, x^n } $, т.е. $ dim mathbb P_{n} =n+1 $. Координатами полинома
$$ f(x)=a_0+a_1x+a_2x^2+dots+a_nx^n $$ будут его коэффициенты. Можно выбрать и другой базис, например,
$ {1, x-c,(x-c)^2,dots,(x-c)^n } $ при произвольном числе $ c_{} $. Координатами полинома в этом базисе будут теперь коэффициенты формулы Тейлора:
$$
f(x) equiv f(c)+
frac{f^{prime}(c)}{1!} (x-c) + frac{f^{prime prime }(c)}{2!} (x-c)^2+
dots + frac{f^{(n)}(c)}{n!} (x-c)^{n} .
$$
?
Найти координаты полинома
$$ x^5-x^4+x^3-x^2-x+1 $$
в базисе $ {1,x+1,x^2+1,x^3+1,x^4+1,x^5+1} $.
Т
Теорема 9. Любое векторное пространство $ mathbb V_{} $ размерности $ d_{} $ изоморфно $ mathbb R^{d} $.
Доказательство. Изоморфизм можно установить следующим соответствием.
Если $ {X_1,dots , X_d } $ — какой-то базис $ mathbb V_{} $, то вектору
$ X in mathbb V $ поставим в соответствие набор его координат в этом базисе:
$$ X=x_1X_1+dots+x_d X_d Rightarrow
X mapsto [x_1,dots,x_d]in mathbb R^d .
$$
На основании теоремы $ 6 $, такое соответствие будет взаимно-однозначным,
а проверка двух свойств изоморфизма тривиальна.
♦
Последний результат позволяет свести исследование свойств произвольного линейного пространства $ mathbb V_{} $ к исследованию свойств пространства $ mathbb R^{d} $. Лишь бы только удалось нам найти базис пространства $ mathbb V_{} $, а также разложение произвольного вектора по этому базису.
Однако некоторые теоретические заключения можно сделать основываясь только лишь на фактах принципиального существования
базиса и возможности разложения по нему произвольного вектора.
Критерии линейной зависимости
Т
Теорема . Строки
$$
{(a_{11},dots,a_{1n}),dots, (a_{n1},dots,a_{nn})} subset mathbb C^n
$$
линейно зависимы тогда и только тогда, когда
$$
left|begin{array}{rrr}
a_{11}&dots & a_{1n} \
dots & & dots \
a_{n1}& dots & a_{nn}
end{array}
right|=0 , .
$$
Т
Теорема . Строки
$$
{(a_{11},dots,a_{1n}),dots, (a_{m1},dots,a_{mn})} subset mathbb C^n
$$
линейно зависимы тогда и только тогда, когда
$$
operatorname{rank} A <m , , npu A=left(begin{array}{rrr}
a_{11}&dots & a_{1n} \
dots & & dots \
a_{m1}& dots & a_{mn}
end{array}
right) , .
$$
=>
Строки
$$
{(a_{11},dots,a_{1n}),dots, (a_{m1},dots,a_{mn})} subset mathbb R^n
$$
линейно зависимы тогда и только тогда, когда
$$
det (A^{top} A) = 0 , .
$$
(Определитель в левой части можно интерпретировать как определитель Грама системы строк.)
Т
Теорема . Аналитические на интервале $ ]a,b[ $ функции $ u_1(x),dots,u_n(x) $ линейно зависимы на $ ]a,b[ $ тогда и только тогда, когда их вронскиан
$$
left|
begin{array}{llll}
u_1(x) & u_2(x) & dots & u_n(x) \
u_1^{prime}(x) & u_2^{prime}(x) & dots & u_n^{prime}(x) \
u_1^{prime prime}(x) & u_2^{prime prime}(x)&dots& u_n^{prime prime}(x)\
dots & & & dots \
u_1^{(n-1)}(x) &u_2^{(n-1)}(x) &dots & u_n^{(n-1)}(x)
end{array}
right|
$$
тождественно равен нулю на $ ]a,b[ $.
Относительный базис
В настоящем пункте $ mathbb V_1 $ обозначает линейное подпространство пространства $ mathbb V_{} $, отличное от тривиального; обозначаем $ d_1=dim mathbb V_1 $.
Т
Теорема. Произвольный базис подпространства $ mathbb V_1 $ можно дополнить до базиса пространства $ mathbb V_{} $.
Доказательство. Пусть $ {X_1,dots,X_{d_1} } $ — какой-то
базис $ mathbb V_1 $. В пространстве $ mathbb V_{} $ найдется вектор
$ X_{d_1+1} $ такой, что система $ {X_1,dots,X_{d_1}, X_{d_1+1 }} $ будет л.н.з. (В противном случае, $ dim mathbb V=d_1 $, что противоречит условию настоящего пункта.) Если
$ d_1+1=d = dim mathbb V $, то, на основании теоремы 5 предыдущего пункта, требуемый
базис построен. Если же $ d_1+1<d $, то в пространстве
$ mathbb V_{} $ найдется вектор
$ X_{d_1+2} $ такой, что система $ {X_1,dots,X_{d_1}, X_{d_1+1 },X_{d_1+2 } } $
будет л.н.з. И т.д. Процесс закончится за конечное число
шагов.
♦
Говорят, что система векторов $ {X_1,dots,X_k} $ линейно независима относительно подпространства $ mathbb V_1 $ пространства $ mathbb V_{} $ если
$${.}_{} mbox{ из условия } quad alpha_1X_1+dots+alpha_k X_k in mathbb V_1 quad mbox{ следует } quad
alpha_1=dots=alpha_k=0 .$$
Т
Теорема. Обозначим $ {Y_1,dots,Y_{d_1}} $ — произвольный базис $ mathbb V_1 $.
Система $ {X_{1},dots,X_k} $ л.н.з. относительно $ mathbb V_1 $ тогда и
только тогда, когда система $ {Y_1,dots,Y_{d_1},X_1,dots,X_k} $ линейно независима.
П
Пример. Найти все значения параметра $ {color{Red} alpha } $, при которых система
$${ X_1=[1,, 2,, {color{Red} alpha },, 1 ]^{^{top}}, X_2=[1,, {color{Red} alpha },, 2,, 1]^{^{top}} }
$$
л.н.з. относительно подпространства
$$mathbb V_1=left{X in mathbb R^4 bigg|
begin{array}{ll}
x_1+2,x_2-3,x_3+4, x_4 &=0, \
x_1+x_2-x_3 -x_4 &=0
end{array}
right} . $$
Решение. Базисом подпространства $ mathbb V_1 $ является произвольная
ФСР заданной системы однородных уравнений,
например $ {Y_1=[-1,2,1,0]^{^{top}}, Y_2=[6,-5,0,1]^{^{top}}} $. Теорема
утверждает, что система $ { X_1, X_2} $ л.н.з. относительно $ mathbb V_1 $
тогда и только тогда, когда система $ { X_1, X_2,Y_1,Y_2} $ л.н.з. (в обычном понимании). Последнее равносильно тому, что матрица, составленная
из этих векторов, должна иметь ранг равный $ 4_{} $.
$$operatorname{rank}
left(
begin{array}{rrrr}
1 & 1 &-1 & 6 \
2 & {color{Red} alpha } & 2 & -5 \
{color{Red} alpha } & 2 & 1 & 0 \
1 & 1 & 0 & 1
end{array}
right)=4 iff
left|
begin{array}{rrrr}
1 & 1 &-1 & 6 \
2 & {color{Red} alpha } & 2 & -5 \
{color{Red} alpha } & 2 & 1 & 0 \
1 & 1 & 0 & 1
end{array}
right|= {color{Red} alpha }^2-10, {color{Red} alpha } +16 ne 0 .
$$
Ответ. $ {color{Red} alpha }not in { 2,, 8} $.
Говорят, что система векторов $ {X_1,dots,X_k} $ образует базис пространства $ mathbb V_{} $ относительно (или над) $ mathbb V_1 $ если она л.н.з. относительно
$ mathbb V_1 $ и любой вектор $ Xin mathbb V_{} $ можно представить в виде
$$ X=c_1X_1+dots+c_kX_k+Y, quad mbox{ где } quad Yin mathbb V_1 . $$
Т
Теорема. Обозначим $ { Y_1,dots,Y_{d_1} } $ — произвольный базис подпространства $ mathbb V_1 $.
Система $ {X_1,dots,X_k} $ образует базис $ mathbb V_{} $ относительно $ mathbb V_1 $ тогда и
только тогда, когда система $ { X_1,dots,X_k,Y_1,dots,Y_{d_1} } $ образует
базис $ mathbb V_{} $.
Доказательство. Действительно, любой вектор $ Xin mathbb V_{} $ выражается через
векторы $ X_1,dots,X_k,Y_1,dots,Y_{d_1} $. По предыдущей теореме для линейной
независимости этих векторов необходимо и достаточно относительной линейной независимости
$ X_1,dots,X_k $.
♦
=>
Базис $ mathbb V_{} $ строится дополнением базиса $ mathbb V_1 $ векторами
$ X_1,dots,X_k $ линейно независимыми относительно $ mathbb V_1 $. Поэтому
$${.}_{} mbox{число векторов относительного базиса } = dim mathbb V — dim
mathbb V_1 .$$
Это число называется коразмерностью6) подпространства $ mathbb V_1 $ в пространстве $ mathbb V $.
Сумма и пересечение линейных подпространств
Пусть $ mathbb V_1 $ и $ mathbb V_2 $ — подпространства
линейного пространства $ mathbb V_{} $. Множество
$$ mathbb V_1+ mathbb V_2 = left{X_1+X_2 big| X_1 in mathbb V_1, X_2 in mathbb V_2 right}$$
называется суммой, а множество
$$ mathbb V_1 cap mathbb V_2 = left{X big| X in mathbb V_1, X in mathbb V_2 right}$$
— пересечением подпространств $ mathbb V_1 $ и $ mathbb V_2 $. Аналогично
определяется сумма и пересечение произвольного количества подпространств.
Понятие пересечения линейных подпространств совпадает с понятием пересечения их как множеств.
Как правило, $ mathbb V_1+ mathbb V_2 ne mathbb V _1 cup mathbb V_2 $.
Т
Теорема. $ mathbb V_1+ mathbb V_2 $ и $ mathbb V_1 cap mathbb V_2 $ являются
подпространствами линейного пространства $ mathbb V_{} $.
?
Докажите, что $ mathbb V_1+ mathbb V_2 $ — это подпространство минимальной размерности, содержащее как $ mathbb V_1 $, так и $ mathbb V_2 $.
Понятие суммы линейных подпространств является частным случаем суммы Минковского двух произвольных подмножеств $ mathbb A_1 $ и $ mathbb A_2 $ линейного пространства:
$$ mathbb A_1 + mathbb A_2 = { X+Y mid X in mathbb A_1, Y in mathbb A_2 } . $$
Для подмножеств $ mathbb A_1={ [1,0], [0,1], [0,-1] } $ и $ mathbb A_2={ [0,0], [1,1] } $ пространства $ mathbb R^2 $ имеем:
$$ mathbb A_1 + mathbb A_2 = { [1,0], [0,1], [0,-1], [2,1], [1,2] } , . $$
Т
Теорема. Имеет место формула:
$$
dim , mathbb V_1 + dim , mathbb V_2=dim , (mathbb V_1 cap mathbb V_2) +
dim , (mathbb V_1 + mathbb V_2) . $$
Доказательство
☞
ЗДЕСЬ.
?
Можно ли обобщить этот результат на случай трех (и более подпространств)? Cправедлив ли, к примеру, аналог
формулы включений-исключений в следующем виде:
$$dim , mathbb V_1 + dim , mathbb V_2 + dim , mathbb V_3 —
$$
$$
-left{dim , (mathbb V_1 cap mathbb V_2) + dim , (mathbb V_1 cap mathbb V_3) +
dim , (mathbb V_2 cap mathbb V_3) right} + $$
$$+ dim , (mathbb V_1 cap mathbb V_2 cap mathbb V_3) =dim , (mathbb V_1 + mathbb V_2 + mathbb V_3) ?$$
Т
Теорема. Имеет место формула:
$${mathcal L}(X_1,dots,X_m)+{mathcal L}(Y_1,dots,Y_{ell})=
{mathcal L}(X_1,dots,X_m,Y_1,dots,Y_{ell}) ;
$$
здесь $ {mathcal L} $ означает линейную оболочку.
П
Пример. Найти базис суммы и размерность пересечения
$$mathbb V_1={mathcal L}left(
left[ begin{array}{r} 0 \1 \ 1 \ 1
end{array} right] ,
left[ begin{array}{r} 1 \1 \ 1 \ 2
end{array} right] ,
left[ begin{array}{r} -2 \0 \ 1 \ 1
end{array} right]
right)
quad mbox{ и } quad
mathbb V_2={mathcal L}left(
left[ begin{array}{r} -1 \3 \ 2 \ -1
end{array} right] ,
left[ begin{array}{r} 1 \1 \ 0 \ -1
end{array} right]
right)
$$
Решение. Действуя согласно предыдущей теореме, составляем матрицу из всех векторов
$$
left( begin{array}{rrrrr}
0 & 1 & -2 & -1 & 1 \
1 & 1 & 0 & 3 & 1 \
1 & 1 & 1 & 2 & 0 \
1 & 2 & 1 & -1 & -1
end{array}
right)
$$
и ищем ее ранг методом окаймляющих миноров. Имеем: $ operatorname{rank} = 3 $ при ненулевом миноре матрицы расположенном в первых трех ее столбцах.
Ответ. Базис $ mathbb V_1 + mathbb V_2 $ составляют векторы $ X_1,X_2,X_3 $;
$ dim , (mathbb V_1 cap mathbb V_2) = 3+2 — 3 =2 $.
Алгоритм нахождения базиса
$ {mathcal L}(X_1,dots,X_m) cap {mathcal L}(Y_1,dots,Y_{ell}) $
проиллюстрируем на примере.
П
Пример. Найти базис $ mathbb V_1 cap mathbb V_2 $ при
$$
begin{array}{l}
mathbb V_1={mathcal L} left(
left[
begin{array}{r}
1 \ -1 \ 1 \ -1 \ 1
end{array}
right],,
left[
begin{array}{r}
1 \ 2 \ 1 \ 2 \ 1
end{array}
right],,
left[
begin{array}{r}
0 \ 1 \ 0 \ 1 \ 0
end{array}
right]
right) \
{}_{} qquad qquad quad X_1 quad quad X_2 quad quad X_3
end{array}
,
begin{array}{l}
mathbb V_2={mathcal L} left(
left[
begin{array}{r}
1 \ 0 \ 0 \ 0 \ 1
end{array}
right],,
left[
begin{array}{r}
1 \ 1 \ 0 \ 1 \ 1
end{array}
right],,
left[
begin{array}{r}
0 \ 1 \ 1 \ 1 \ 0
end{array}
right]
right) \
{}_{} quad qquad qquad Y_1 qquad Y_2 quad quad Y_3
end{array}
.
$$
Решение.
1.
Сначала найдем базисы каждого из подпространств:
$$dim mathbb V_1=2, mathbb V_1=mathcal L(X_1, X_2) ; dim mathbb V_2=3,
mathbb V_2=mathcal L(Y_1, Y_2, Y_3) . $$
2.
Произвольный вектор $ Zin mathbb R^5 $, принадлежащий
$ mathbb V_1 cap mathbb V_2 $, должен
раскладываться по базису каждого из подпространств:
$$Z=alpha_1 X_1 + alpha_2 X_2= beta_1 Y_1 + beta_2 Y_2 + beta_3 Y_3 .$$
Для определения неизвестных значений координат составляем систему уравнений
$$
begin{array}{l}
qquad X_1 X_2 \
qquad {color{RubineRed} downarrow} {color{RubineRed} downarrow} \
left( begin{array}{rrrrrrr}
1 & 1 & -1 & &-1 & & 0 \
-1 & 2 & 0 & & -1 & & -1 \
1 & 1 & 0 & & 0 & & -1 \
-1 & 2 & 0 & & -1 & & -1 \
1 & 1 & -1 & & -1 & & 0
end{array}
right) \
qquad qquad qquad {color{RubineRed} uparrow} qquad {color{RubineRed} uparrow} qquad quad {color{RubineRed} uparrow} \
quad qquad qquad -Y_1 quad — Y_2 quad -Y_3
end{array}
left(
begin{array}{r}
alpha_1 \ alpha_2 \ beta_1 \ beta_2 \ beta_3
end{array}
right)= mathbb O_{5times 1}
$$
и решаем ее по методу Гаусса с нахождением фундаментальной системы решений:
$$
left( begin{array}{rrrrr}
1 & 1 & -1 & -1 & 0 \
0 & 3 & -1 & -2 & -1 \
0 & 0 & 1 & 1 & -1 \
0 & 0 & 0 & 0 & 0 \
0 & 0 & 0 & 0 & 0
end{array}
right) left(
begin{array}{r}
alpha_1 \ alpha_2 \ beta_1 \ beta_2 \ beta_3
end{array}
right)= mathbb O quad Rightarrow qquad mbox{ ФСР } qquad
begin{array}{rrr|rr}
alpha_1 & alpha_2 & beta_1 & beta_2 & beta_3 \ hline
-1/3 & 1/3 & -1 & 1 & 0 \
1/3 & 2/3 & 1 & 0 & 1
end{array}
$$
3.
Получившиеся значения координат позволяют выразить
базис пересечения — либо через базис подпространства $ mathbb V_1 $
(если использовать полученные значения для $ alpha_1,alpha_2 $), либо
через базис подпространства $ mathbb V_2 $
(если использовать $ beta_1,beta_2, beta_3 $). Например,
$$
Z_1=-1/3 X_1 + 1/3 X_2 = [0,1,0,1,0]^{^{top}},
$$
$$
Z_2=1/3 X_1 + 2/3 X_2 = [1,1,1,1,1]^{^{top}}
.
$$
Ответ.7) $ left{[0,1,0,1,0]^{^{top}},, [1,1,1,1,1]^{^{top}} right} $.
?
Найти базисы суммы и пересечения подпространств
$$
mathbb V_1=left{
Xin mathbb R^4 left|
begin{array}{rrrrl}
2,x_1&+x_2&+4,x_3&+x_4 &= 0, \
2,x_1&+x_2&+3,x_3& &=0
end{array}
right.
right}
$$
и
$$
mathbb V_2=
left{
Xin mathbb R^4 left|
begin{array}{rrrrl}
3,x_1&+2,x_2&-x_3&-6, x_4 &= 0, \
2,x_1&&+8,x_3 &+7, x_4 &=0
end{array}
right.
right} .
$$
Решение
☞
ЗДЕСЬ.
Прямая сумма линейных подпространств
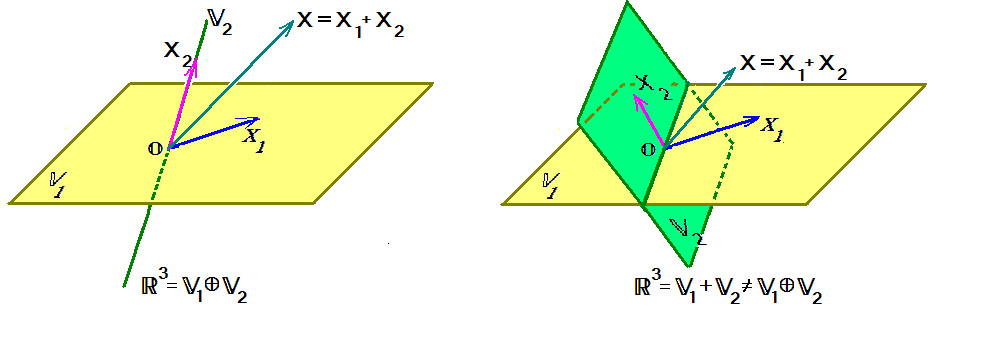
Пусть $ mathbb V_1 $ и $ mathbb V_2 $ — подпространства линейного пространства $ mathbb V_{} $.
Говорят, что $ mathbb V_{} $ раскладывается в прямую сумму подпространств
$ mathbb V_1 $ и $ mathbb V_2 $ если любой вектор $ Xin mathbb V_{} $ может быть представлен
в виде $ X=X_1+X_2 $, где $ X_1in mathbb V_1,X_2in mathbb V_2 $ и
такое представление единственно. Этот факт записывают: $ mathbb V= mathbb V_1 oplus mathbb V_2 $. Вектор $ X_{1} $ называется проекцией вектора $ X_{} $ на подпространство $ mathbb V_1 $ параллельно подпространству $ mathbb V_{2} $.
П
Пример. Линейное пространство квадратных матриц порядка $ n_{} $
раскладывается в прямую сумму подпространств: подпространства симметричных
матриц и подпространства кососимметричных матриц. В самом деле, для матрицы
$ A_{ntimes n} $ справедливо разложение
$$A=frac{1}{2} left(A+A^{^top} right) + frac{1}{2} left(A-A^{^top} right)
$$
и в правой части первая скобка дает симметричную матрицу, а
вторая — кососимметричную. Покажите, что не существует иного
разложения матрицы $ A_{} $ в сумму симметричной и кососимметричной.
Т
Теорема. Пусть $ mathbb V=mathbb V_1 + mathbb V_2 $.
Эта сумма будет прямой тогда и только тогда, когда подпространства $ mathbb V_1 $ и $ mathbb V_2 $ имеют тривиальное пересечение:
$$mathbb V_1 cap mathbb V_2={mathbb O } .$$
Доказательство. Необходимость. Пусть сумма $ mathbb V_1 + mathbb V_2 $ — прямая, но существует вектор $ Xne mathbb O $, принадлежащий $ mathbb V_1 cap mathbb V_2 $.
Но тогда и вектор $ (-X) $ принадлежит $ mathbb V_1 cap mathbb V_2 $. Для нулевого вектора $ mathbb O $ получаем два представления в виде суммы проекций на подпространства:
$$ mathbb O = mathbb O + mathbb O = X+ (-X) , . $$
Это противоречит понятию прямой суммы.
Достаточность. Если $ mathbb V_1 cap mathbb V_2={mathbb O } $, но существует вектор $ X in mathbb V_1 + mathbb V_2 $, имеющий два различных разложения в сумму проекций
$$ X=X_1+X_2 =Y_1+ Y_2 quad npu quad {X_1,Y_1} subset mathbb V_1, {X_2,Y_2} subset mathbb V_2, $$
то
$$ (X_1-Y_1)+(X_2-Y_2) =mathbb O quad Rightarrow quad X_1-Y_1=Y_2-X_2 , , $$
т.е. вектор $ X_1-Y_1 $ принадлежит $ mathbb V_1 cap mathbb V_2 $. Но, по предположению, $ mathbb V_1 cap mathbb V_2={mathbb O } $, следовательно, $ X_1-Y_1=mathbb O $, но тогда и $ Y_2-X_2=mathbb O $.
♦
=>
Сумма $ mathbb V=mathbb V_1 + mathbb V_2 $ будет прямой тогда и только тогда, когда
базис $ mathbb V_{} $ может быть получен объединением базисов $ mathbb V_{j} $.
Сформулированное таким образом утверждение содержится во многих учебниках по линейной алгебре. Тем не менее, с формальной точки зрения, оно неверно. В самом деле,
пусть $ mathbb V_1 = {mathcal L}(X_1,X_2),, mathbb V_2 = {mathcal L}(X_2,X_3) $ при
линейно независимых $ X_1,X_2,X_3 $. Очевидно базис
$ mathbb V_1 + mathbb V_2 ={mathcal L}(X_1,X_2,X_3) $ получается объединением базисов
$ mathbb V_1 $ и $ mathbb V_2 $. В то же время $ mathbb V_1 cap mathbb V_2ne {mathbb O } $.
Причина возникновения этой ошибки кроется в содержании термина
«объединение базисов». С точки зрения терминологии теории множеств,
во множестве не могут содержаться одинаковые элементы (во множестве
они неразличимы). Однако мы с самого начала изложения допустили,
что в систему векторов могут входить одинаковые, которые различаются
порядком своего расположения (хотя это особо и не подчеркивалось, векторы
в системе всегда пронумерованы). Исходя из этих соображений, объединение
базисов $ mathbb V_1 $ и $ mathbb V_2 $ будет пониматься 
в настоящем пункте (и кое-где далее) как система векторов, в которую входят последовательно векторы базисов
$ mathbb V_1 $ и $ mathbb V_2 $ — с допуском дублей. В рамках такой договоренности,
для приведенного примера получим: объединение базисов линейных подпространств
$ {mathcal L}(X_1,X_2) $ и $ {mathcal L}(X_2,X_3) $ представляет систему
$ {X_1,X_2,X_2,X_3} $, которая, очевидно, не является базисом. Таким образом
сумма $ {mathcal L}(X_1,X_2)+{mathcal L}(X_2,X_3) $ не является прямой, и результат
следствия остается справедливым.
П
Пример [2]. Доказать, что сумма подпространств
$$mathbb V_1={mathcal L}left(
left[ begin{array}{r} 2 \3 \ 11 \ 5
end{array} right] ,
left[ begin{array}{r} 1 \1 \ 5 \ 2
end{array} right] ,
left[ begin{array}{r} 0 \1 \ 1 \ 1
end{array} right]
right)
quad mbox{ и } quad
mathbb V_2={mathcal L}left(
left[ begin{array}{r} 2 \1 \ 3 \ 2
end{array} right] ,
left[ begin{array}{r} 1 \1 \ 3 \ 4
end{array} right] ,
left[ begin{array}{r} 5 \2 \ 6 \ 2
end{array} right]
right)
$$
будет прямой и найти проекции вектора $ Z=[2,0,0,3]^{top} $ на эти подпространства.
Решение. Базисы $ mathbb V_1 $ и $ mathbb V_2 $ составляют соответственно системы
$ {X_2,X_3} $ и $ { Y_1,Y_2 } $, т.е. $ dim , mathbb V_1=dim , mathbb V_2 =2 $.
На основании следствия достаточно установить, что объединенная
система $ {X_2,X_3,Y_1,Y_2 } $ л.н.з. Для этого достаточно проверить, что определитель матрицы
$$
A=left(
begin{array}{rrrr}
1 & 0 & 2 & 1 \
1 & 1 & 1 & 1 \
5 & 1 & 3 & 3 \
2 & 1 & 2 & 4
end{array}
right)
$$
отличен от нуля. Поскольку это условие выполнено, то сумма $ mathbb V_1 + mathbb V_2 $ —
прямая и базис этой суммы состоит из взятых векторов.
Для нахождения разложения вектора $ X_{} $ по этому базису
решаем систему уравнений
$$A left[
begin{array}{c}
alpha_2 \ alpha_3 \ beta_1 \ beta_2
end{array}
right] = Z
$$
и получаем единственное решение:
$ alpha_2=-1,, alpha_3=-1,, beta_1 =1, , beta_2=1 $. Разложение
$ Z=Z_1+Z_2 $ составляют векторы $ Z_1=alpha_2 X_2+alpha_3 X_3 $ и
$ Z_2=beta_1 Y_1+beta_2 Y_2 $.
Ответ. $ Z=[-1,-2,-6,-3]^{top} + [3,2,6,6]^{top} $.
Линейные многообразия
Пусть $ mathbb V_1 $ — линейное подпространство пространства
$ mathbb V_{} $, а $ X_{0} $ — произвольный фиксированный вектор из $ mathbb V_{} $. Множество
$$ mathbb M = X_0+ mathbb V_1 = left{X_0+Y big| Y in mathbb V_1 right} $$
называется линейным многообразием (порожденным подпространством $ mathbb V_1 $). Размерностью этого
многообразия называется размерность порождающего его подпространства: $ dim mathbb M = dim mathbb V_1 $. В случае $ 1 < dim mathbb M = k < dim mathbb V $ о многообразии $ mathbb M $ говорят как о k-мерной плоскости (или гиперплоскости), а при $ k=1 $ — как о прямой.
Образно говоря, многообразие — это сдвиг порождающего его линейного подпространства.
П
Пример. Множество полиномов вида
$$ f(x)= a_0x^3+a_1x^2+a_2x+1 in mathbb R[x] , , $$
т.е. таких, что $ deg f le 3, f(0)=1 $ образует линейное многообразие, порожденное линейным подпространством полиномов $ { x(a_0x^2+a_1x+a_2) mid (a_0,a_1,a_2) in mathbb R^3 } $.
Пересечение многообразий определяется традиционным способом, а сумма многообразий не определяется. Будем называть многообразия, порожденные одним и тем же подпространством
$$ mathbb M = X_0+ mathbb V_1 quad u quad widetilde{mathbb M} = widetilde X_0+ mathbb V_1 , $$
параллельными многообразиями.
П
Пример. Множество столбцов пространства $ mathbb R^{n} $, удовлетворяющих системе уравнений
$$
left{begin{array}{ccc}
a_{11}x_1 +a_{12}x_2+ldots+a_{1n}x_n &=&b_1,\
a_{21}x_1 +a_{22}x_2+ldots+a_{2n}x_n &=&b_2,\
ldots& & ldots \
a_{m1}x_1 +a_{m2}x_2+ldots+a_{mn}x_n &=&b_m
end{array}right.
iff
AX={mathcal B} ,
$$
образует линейное многообразие.
При $ {mathcal B}ne mathbb O_{mtimes 1} $ это многообразие не будет являться линейным пространством. Структуру этого множества описывала теорема из пункта
☞
ОБЩЕЕ РЕШЕНИЕ: если система совместна, то ее
общее решение можно представить как сумму какого-то одного ее решения и общего
решения соответствующей однородной системы $ AX= mathbb O $. Таким образом, многообразие решений неоднородной системы $ AX={mathcal B} $ допускает «параметрическое представление»:
$$mathbb M=X_0+ {mathcal L}(X_1,dots,X_{n-{mathfrak r}})=
$$
$$=left{X_0+t_1
X_1+dots+ t_{n-{mathfrak r}} X_{n-{mathfrak r}} mid (t_1,dots, t_{n-{mathfrak r}}) in mathbb R^{n-{mathfrak r}} right} ; $$
здесь $ X_{0} $ означает частное решение системы (т.е. $ AX_0={mathcal B} $),
$ {X_1,dots,X_{n-{mathfrak r}}} $ — ФСР для системы $ AX= mathbb O $,
а $ mathfrak r= operatorname{rank} A= operatorname{rank} [Amid mathcal B] $.
Получаем, следовательно, $ (n-{mathfrak r}) $-мерную плоскость в $ mathbb R^n $, a в случае $ (n-{mathfrak r})=1 $ — прямую
$$mathbb M=X_0+tX_1 quad npu t in mathbb R ; $$
в последнем случае вектор $ X_{1} $ называют направляющим вектором этой прямой.
§
Некоторые задачи на линейные многообразия
☞
ЗДЕСЬ.
Факторпространство
определяется
☞
ЗДЕСЬ.
Преобразование координат при замене базиса
Пусть $ mathbb V_{} $ — линейное пространство размерности $ n_{} $, пусть
$$ {X_1,dots,X_n} quad u quad {{mathfrak X}_1,dots,{mathfrak X}_n}$$
— два произвольных его базиса («старый» и «новый»).
Задача. Вывести соотношения, связывающие координаты произвольного
вектора $ Xin mathbb V_{} $ в старом и новом базисах:
$$X=x_1X_1+dots+x_nX_n={mathfrak x}_1{mathfrak X}_1+dots+{mathfrak x}_n{mathfrak X}_n
.$$
Предположим, что нам известны координаты векторов нового базиса в старом:
$$
left{
begin{array}{ccc}
{mathfrak X}_1&=&c_{11}X_1+c_{21}X_2+dots+c_{n1}X_n, \
{mathfrak X}_2&=&c_{12}X_1+c_{22}X_2+dots+c_{n2}X_n, \
dots& & dots \
{mathfrak X}_n&=&c_{1n}X_1+c_{2n}X_2+dots+c_{nn}X_n.
end{array}
right.
$$
Матрица
$$
C=left(
begin{array}{cccc}
c_{11} & c_{12} & dots & c_{1n} \
c_{21} & c_{22} & dots & c_{2n} \
dots & & & dots \
c_{n1} & c_{n2} & dots & c_{nn} \
end{array}
right),
$$
по столбцам которой стоят координаты новых базисных векторов в старом базисе называется матрицей перехода от старого базиса к новому, а также — ввиду одного из приведенных ниже результатов — матрицей преобразования координат.
Т
Теорема. Матрица $ C_{} $ неособенная.
Доказательство. Cначала покажем справедливость утверждения в частном случае $ mathbb V=mathbb R^n $. Вектора нового и старого базисов являются столбцами из $ n $ вещественных чисел, и равенства, задающие элементы матрицы $ C_{} $, можно переписать в матричном виде:
$$
left[{mathfrak X}_1|dots|{mathfrak X}_nright]=left[X_1|dots|X_nright]cdot C .
$$
Здесь $ | $ означает конкатенацию. Поскольку системы $ {X_1,dots,X_n} $ и $ {{mathfrak X}_1,dots,{mathfrak X}_n} $ — базисные, то
$$det left[X_1|dots |X_nright] ne 0, quad
det left[{mathfrak X}_1|dots |{mathfrak X}_nright] ne 0 .$$
Из последнего матричного равенства (и теоремы Бине-Коши ) тогда следует, что $ det Cne 0 $.
Теперь докажем теорему для случая произвольного пространства. Если $ det C= 0 $, то столбцы матрицы $ C_{} $ линейно зависимы (см.
☞
ЗДЕСЬ ), т.е. существует линейная комбинация
$$alpha_1 c_{j1}+ dots+alpha_n c_{jn}=0 quad npu quad forall jin {1,dots,n } $$
и при некотором $ alpha_kne 0 $. Но тогда из формул
$$
left{
begin{array}{ccc}
{mathfrak X}_1&=&c_{11}X_1+c_{21}X_2+dots+c_{n1}X_n, \
{mathfrak X}_2&=&c_{12}X_1+c_{22}X_2+dots+c_{n2}X_n, \
dots& & dots \
{mathfrak X}_n&=&c_{1n}X_1+c_{2n}X_2+dots+c_{nn}X_n.
end{array}
right.
$$
следует, что
$$alpha_1 {mathfrak X}_1+ dots+alpha_n {mathfrak X}_n=mathbb O ,$$
что противоречит линейной независимости системы $ {{mathfrak X}_1,dots,{mathfrak X}_n} $.
♦
П
Пример. Найти матрицу перехода
| от базиса | к базису | |
|---|---|---|
| $ left[1,1,0,0,0right] $ | $ left[1,1,1,1,1right] $ | |
| $ left[1,0,1,0,0right] $ | $ left[1,1,1,1,0right] $ | |
| $ left[1,0,0,1,0right] $ | $ left[1,1,1,0,0right] $ | |
| $ left[1,0,0,0,1right] $ | $ left[1,1,0,0,0right] $ | |
| $ left[1,1,1,1,1right] $ | $ left[1,0,0,0,0right] $ |
Решение. Можно попытаться найти элементы матрицы $ C_{} $ напрямую — устанавливая формулы связи между строками. В нашем конкретном примере это не очень трудно сделать — первый и четвертый
столбцы матрицы $ C_{} $ вообще очевидны поскольку $ {mathfrak X}_1 = X_5,, {mathfrak X}_4 = X_1 $. Но мы пойдем по формальному пути и воспользуемся определяющим матричным соотношением, которое мы получили при доказательстве предыдущей теоремы. Поставим координаты базисных векторов по столбцам соответствующих матриц:
$$
left[{mathfrak X}_1|dots|{mathfrak X}_nright]=left[X_1|dots|X_nright]cdot C quad Rightarrow
$$
$$
Rightarrow C= left[X_1|dots|X_nright]^{-1} cdot left[{mathfrak X}_1|dots|{mathfrak X}_nright] .
$$
В нашем примере имеем:
$$
C=
left(
begin{array}{ccccc}
1 & 1 & 1 & 1 & 1 \
1 & 0 & 0 & 0 & 1 \
0 & 1 & 0 & 0 & 1 \
0 & 0 & 1 & 0 & 1 \
0 & 0 & 0 & 1 & 1
end{array}
right)^{-1}
left(
begin{array}{ccccc}
1 & 1 & 1 & 1 & 1 \
1 & 1 & 1 & 1 & 0 \
1 & 1 & 1 & 0 & 0 \
1 & 1 & 0 & 0 & 0 \
1 & 0 & 0 & 0 & 0
end{array}
right)=
$$
$$
=frac{1}{3}
left(
begin{array}{rrrrr}
1 & 2 & -1 & -1 & -1 \
1 & -1 & 2 & -1 & -1 \
1 & -1 & -1 & 2 & -1 \
1 & -1 & -1 & -1 & 2 \
-1 & 1 & 1 & 1 & 1
end{array}
right)
left(
begin{array}{ccccc}
1 & 1 & 1 & 1 & 1 \
1 & 1 & 1 & 1 & 0 \
1 & 1 & 1 & 0 & 0 \
1 & 1 & 0 & 0 & 0 \
1 & 0 & 0 & 0 & 0
end{array}
right) =
$$
$$
=left(
begin{array}{rrrrr}
0 & 1/3 & 2/3 & 1 & 1/3 \
0 & 1/3 & 2/3 & 0 & 1/3 \
0 & 1/3 & -1/3 & 0 & 1/3 \
0 & -2/3 & -1/3 & 0 & 1/3 \
1 & 2/3 & 1/3 & 0 & -1/3
end{array}
right) .
$$
♦
Т
Теорема. Координаты вектора в старом и новом базисах связаны посредством матрицы перехода $ C_{} $ соотношениями
$$
left{
begin{array}{ccc}
x_1&=&c_{11}{mathfrak x}_1+c_{12}{mathfrak x}_2+dots+c_{1n}{mathfrak x}_n, \
x_2&=&c_{21}{mathfrak x}_1+c_{22}{mathfrak x}_2+dots+c_{2n}{mathfrak x}_n, \
dots& & dots \
x_n&=&c_{n1}{mathfrak x}_1+c_{n2}{mathfrak x}_2+dots+c_{nn}{mathfrak x}_n
end{array}
right.
quad iff quad
left( begin{array}{c}
x_1 \ x_2 \ vdots \ x_n
end{array} right)
=C left( begin{array}{c}
{mathfrak x}_1 \ {mathfrak x}_2 \ vdots \ {mathfrak x}_n
end{array} right) .
$$
Доказательство.
$$
begin{array}{lll}
X=x_1X_1+dots+x_nX_n&=&{mathfrak x}_1{mathfrak X}_1+dots+{mathfrak x}_n{mathfrak X}_n = \
&=&{mathfrak x}_1(c_{11}X_1+c_{21}X_2+dots+c_{n1}X_n)+\
&+&{mathfrak x}_2(c_{12}X_1+c_{22}X_2+dots+c_{n2}X_n)+\
&+& dots +\
&+&{mathfrak x}_n(c_{1n}X_1+c_{2n}X_2+dots+c_{nn}X_n)=\
=(c_{11}{mathfrak x}_1+c_{12}{mathfrak x}_2+dots+c_{1n}{mathfrak x}_n)X_1&+&dots+
(c_{n1}{mathfrak x}_1+c_{n2}{mathfrak x}_2+dots+c_{nn}{mathfrak x}_n)X_n
end{array}
$$
Поскольку при фиксированном базисе координаты вектора определяются однозначно (теорема $ 6 $
☞
ЗДЕСЬ ),
получаем равенства
$$
left{
begin{array}{ccc}
x_1&=&c_{11}{mathfrak x}_1+c_{12}{mathfrak x}_2+dots+c_{1n}{mathfrak x}_n, \
x_2&=&c_{21}{mathfrak x}_1+c_{22}{mathfrak x}_2+dots+c_{2n}{mathfrak x}_n, \
dots& & dots \
x_n&=&c_{n1}{mathfrak x}_1+c_{n2}{mathfrak x}_2+dots+c_{nn}{mathfrak x}_n
end{array}
right.
quad iff quad
left( begin{array}{c}
x_1 \ x_2 \ vdots \ x_n
end{array} right)
=C left( begin{array}{c}
{mathfrak x}_1 \ {mathfrak x}_2 \ vdots \ {mathfrak x}_n
end{array} right)
$$
♦
Практическое значение последнего результата невелико, т.к. нас интересуют именно новые координаты.
=>
Новые координаты выражаются через старые по формуле
$$
left( begin{array}{c}
{mathfrak x}_1 \ {mathfrak x}_2 \ vdots \ {mathfrak x}_n
end{array} right)
=C^{-1} left( begin{array}{c}
x_1 \ x_2 \ vdots \ x_n
end{array} right),
$$
при этом матрицу $ C^{-1} $ можно интерпретировать как матрицу перехода от нового базиса к старому.
?
Пусть в некотором «новейшем» базисе $ { {mathcal X}_1,dots,{mathcal X}_n } $
пространства $ mathbb V_{} $ вектор $ X_{} $ имеет координаты $ (varkappa_1,dots,varkappa_n) $.
Как они связаны с координатами $ (x_{1},dots,x_n) $ в старом базисе $ {X_1,dots,X_n} $, если известны матрица $ C_{} $ перехода от этого базиса к базису $ {{mathfrak X}_1,dots,{mathfrak X}_n } $ и матрица $ D_{} $ перехода от базиса $ {{mathfrak X}_1,dots,{mathfrak X}_n } $ к базису $ {{mathcal X}_1,dots,{mathcal X}_n } $ ?
Евклидовы пространства
— как линейные пространства, в которых вводится понятия угла и расстояния между векторами — рассматриваются
☞
ЗДЕСЬ.
Нормированные пространства
— как линейные пространства, в которых вводится понятие расстояния между векторами — рассматриваются
☞
ЗДЕСЬ.
Линейные отображения
пространств рассматриваются
☞
ЗДЕСЬ
Задачи
Источники
[1]. Лаврентьев М., Люстерник Л. Основы вариационного исчисления. Том 1. Часть I. М.-Л.ОНТИ. 1935, с. 22
[2]. Икрамов Х.Д. Задачник по линейной алгебре. М.1975
[3]. Шилов Г.Е. Математический анализ. Конечномерные линейные пространства. М.Наука.1969
Пересечение — многообразие
Cтраница 1
Пересечение V многообразия М с В является тогда компактным многообразием и одновременно подполи-эдром В. Следует обратить внимание на несколько обстоятельств.
[1]
Из трансверсальности пересечений многообразий и Х — леммы несложно вывести.
[2]
Очевидным образом определяется пересечение многообразий. Объединением многообразий считается многообразие, порожденное их теоретико-множественным объединением. Относительно этих операций совокупность всех многообразий Ф — алгебр образует полную модулярную решетку. Атомами этой решетки при Ф Z служат многообразия, задаваемые тождествами рх 0 и ху 0 или рх 0 и х х, где р — некоторое простое число. При р 2 получаем многообразие булевых колец. Решетка ft ( 93) антиизоморфна решетке Г — идеалов свободной ЭЗ-алгебры.
[3]
Очевидным образом определяется пересечение многообразий. Объединением многообразий считается многообразие, порожденное их теоретико-множественным объединением. Относительно этих операций совокупность всех многообразий Ф — алгебр образует полную модулярную решетку. Атомами этой решетки при Ф Z служат многообразия, задаваемые тождествами рх О и ху О или рх О и хР х, где р — некоторое простое число. При р 2 получаем многообразие булевых колец. Решетка й ( 33) антиизоморфна решетке Г — идеалов свободной SB-алгебры.
[4]
Поэтому в общем случае пересечение преобразованного многообразия (7.68) и многообразия v3 — О происходит в отдельных точках и без касаний.
[5]
Поэтому в общем случае пересечение преобразованного многообразия (7.68) и многообразия у О происходит в отдельных точках и без касаний.
[6]
Обозначим через Wu ( p, Б) связную компоненту точки р в пересечении многообразия Wu ( p) с шаром радиуса е с центром а точке р; множество W8 ( p Е) определяется аналогично.
[7]
Стоит напомнить, что все предыдущие конструкции кратностей пересечений, за исключением Tor-определения Серра, применимы только в том случае, когда одно из пересекаемых многообразий регулярно вложено в объемлющее пространство. Кратности пересечений произвольных многообразий на неособом многообразии определяются с помощью редукции к диагонали, о чем рассказывается в следующей главе.
[8]
В сечении Пуанкаре некоторой динамической системы или на фазовой плоскости двумерного отображения при наличии двух седловых неподвижных точек может встретиться ситуация, когда устойчивое многообразие одной точки пересекается с неустойчивым многообразием другой. Такая точка пересечения многообразий называется гетероклинической.
[10]
Это соответствует одному из утверждений теоремы Купки-Смейла для диффеоморфизмов. Построенная выше точка р трансверсального пересечения многообразий Ws ( Og g) и Wa ( аа, g) называется трансверсальной гомоклини-ческой точкой.
[11]
Введенное Пуанкаре з вероятностных соображений понятие кинематической меры ( плотности) было развито в интегральной геометрии Сантало и Бляшке, а потом и другими авторами. Это понятие оказалось полезным в применениях интегральной геометрии, когда рассматривается множество пересечений подвижного многообразия с неподвижным. Точные определения и важнейшие — результаты собраны в Лекциях Бляшке и Введении…
[12]
Следует выбрать М трансверсальным к Z и применить ассоциативность произведений-пересечений. Вместе с примерами 8.4.5 и 8.2.6 это показывает, как кратности пересечений на произвольных неособых многообразиях можно определить при помощи кратностей пересечений многообразий дополнительных размерностей в Р, одно из которых к тому же является линейным подпространством.
[13]
Однако теория дифференциально алгебраич. Значительный интерес представляет теория пересечений дифференциально алгебраич. Для них неверно утверждение, что пересечение двух неприводимых многообразий размерности р и д в га-мерном аффинном пространстве имеет размерность но менее р — — д-п. Для порядка пересечения многообразий относительно специальным образом выбираемого базиса получены нек-рые оценки сверху. В частности, можно ввести понятия дифференциально однородных полиномов и проективных дифференциально алгебраич.
[14]
Осознание того, что исчисление Шуберта по существу совпадает с алгеброй многочленов Шура ( появившихся из теории представлений симметрических групп), происходило неоднократно. Джамбелли [ Giambelli 2 ], по-видимому, первым выразил общие детерминанталь-ные множества через такие многочлены. Сами многочлены восходят к Якоби. Явная связь была отмечена Лезье ( [ Lesieur 1 ]) после того, как Эресман ( [ Ehresmann 1 ]) нашел клеточную структуру и кольцо когомо-логий грассманианов, ср. Хорошее представление об этом дают семинары в Страсбурге ( 1976 г.) и Торуни ( 1980 г.) ( ср. Стоит отметить, что хотя многое из этой алгебры восходит к Шуберту, Пьери, Джамбелли и другим классикам алгебраической геометрии, общее правило для пересечения многообразий Шуберта появилось только после правила Литтлвуда — Ричардсона.
[15]
Страницы:
1
2
на алгебраическом многообразии — теория пересечений алгебраич. подмногообразий и циклов. Пусть X — гладкое алгебраич. многообразие размерности пнад полем k, a Yи Z — подмногообразия Xкоразмерности i и j соответственно. Если Yи Zпересекаются транс-версально, то  является гладким подмногообразием коразмерности i+j, к-рое обозначается
является гладким подмногообразием коразмерности i+j, к-рое обозначается  В общем случае паре (Y,Z) сопоставляется алгебраический цикл Y.Z коразмерности i+j;. Идея его определения состоит в том, чтобы заменить Y и Z на эквивалентные в каком-то смысле циклы Y’ и Z’, находящиеся уже в общем положении, и взять затем пересечение Y’ и Z’; конечно, при этом цикл Y’.Z’ также определен с точностью до эквивалентности.
В общем случае паре (Y,Z) сопоставляется алгебраический цикл Y.Z коразмерности i+j;. Идея его определения состоит в том, чтобы заменить Y и Z на эквивалентные в каком-то смысле циклы Y’ и Z’, находящиеся уже в общем положении, и взять затем пересечение Y’ и Z’; конечно, при этом цикл Y’.Z’ также определен с точностью до эквивалентности.
Пусть А i (Х) — группа классов алгебраич. циклов коразмерности i на Xпо модулю рациональной эквивалентности;  .
.
Теория пересечений Чжоу состоит из построения трех частей:
а) структуры градуированного коммутативного кольца на (X).для каждого гладкого квазипроективного многообразия X;
б) гомоморфизма градуированных колец 
 для каждого морфизма
для каждого морфизма  (обратный образ);
(обратный образ);
в) гомоморфизма групп  степени dimY-dimX для каждого собственного морфизма
степени dimY-dimX для каждого собственного морфизма  (прямой образ).
(прямой образ).
При этом структуры а), б), в) связаны рядом соотношений, важнейшими из к-рых являются:
формула проекции: для собственного морфизма  и циклов
и циклов  и
и 

редукция к диагонали: если 
 — диагональный морфизм, а
— диагональный морфизм, а  , то
, то

Кроме того, существует естественный гомоморфизм

что позволяет построить теорию Чжэня классов со значениями в кольце Чжоу, и в частности характер Чжэня

являющийся гомоморфизмом колец.
Проще всего определяется гомоморфизм прямого образа f*. Пусть  — неприводимое подмногообразие; если dimf(Z)<dimZ,то f* (Z) = 0, если dim f(Z)=dimZ, то f*(Z)=d.f(Z), где d — степень Z над f(Z). По линейности определение продолжается на циклы и классы циклов. Гомоморфизм обратного образа f* сводится к умножению циклов по формуле
— неприводимое подмногообразие; если dimf(Z)<dimZ,то f* (Z) = 0, если dim f(Z)=dimZ, то f*(Z)=d.f(Z), где d — степень Z над f(Z). По линейности определение продолжается на циклы и классы циклов. Гомоморфизм обратного образа f* сводится к умножению циклов по формуле

где  — проекция, а
— проекция, а  — график f. Определение умножения циклов делается в два этапа. Пусть сначала Y и Z — неприводимые подмногообразия в X, к-рые пересекаются собственно (т. е. коразмерность
— график f. Определение умножения циклов делается в два этапа. Пусть сначала Y и Z — неприводимые подмногообразия в X, к-рые пересекаются собственно (т. е. коразмерность  равна сумме коразмерностей Y и Z). Каждой компоненте Wпересечения
равна сумме коразмерностей Y и Z). Каждой компоненте Wпересечения  приписывается нек-рое целое положительное число i(Y, Z; W) — локальная кратность пересечения. Есть несколько определений числа i(Y, Z; W), напр. Tor-формула Серра:
приписывается нек-рое целое положительное число i(Y, Z; W) — локальная кратность пересечения. Есть несколько определений числа i(Y, Z; W), напр. Tor-формула Серра:

где А — локальное кольцо  — идеалы Y и Z,a l — длина А- модуля. После этого полагают
— идеалы Y и Z,a l — длина А- модуля. После этого полагают

где Wпробегает неприводимые компоненты 
Второй этап — лемма Чжоу о сдвиге — состоит в утверждении, что для произвольных циклов Y, Z на квазипроективном многообразии Xсуществует цикл Z’, рационально эквивалентный Z, к-рый пересекается собственно с Y; более того, класс рациональной эквивалентности  не зависит от Z’.
не зависит от Z’.
Наиболее интересен случай проективного многообразия X;применяя функтор прямого образа к структурному морфизму  , получают отображение степени
, получают отображение степени  . По существу, степень цикла — это число точек в нульмерной компоненте цикла. Композиция умножения со степенью позволяет численно измерять пересечение. Напр., если Yи Z имеют дополнительные размерности, то получается пересечения индекс (число) Y и Z. Аналогично, получается индекс пересечения пдивизоров
. По существу, степень цикла — это число точек в нульмерной компоненте цикла. Композиция умножения со степенью позволяет численно измерять пересечение. Напр., если Yи Z имеют дополнительные размерности, то получается пересечения индекс (число) Y и Z. Аналогично, получается индекс пересечения пдивизоров  :
:

Напр., кольцо Чжоу проективного пространства Р n порождается классом гиперплоскости Н, причем  . Поэтому если D1…,Dn — гиперповерхности степени d1…,dn, то (D1,..,Dn) = d1.….dn (теорема Безу). Степень проективного многообразия
. Поэтому если D1…,Dn — гиперповерхности степени d1…,dn, то (D1,..,Dn) = d1.….dn (теорема Безу). Степень проективного многообразия  размерности kопределяется как индекс пересечения Y с линейным подпространством
размерности kопределяется как индекс пересечения Y с линейным подпространством  дополнительной размерности; если многообразия Yи Z пересекаются трансверсально, то степень
дополнительной размерности; если многообразия Yи Z пересекаются трансверсально, то степень  есть произведение степеней Y и Z.
есть произведение степеней Y и Z.
Для собственно пересекающихся эффективных дивизоров  , но в общем случае это уже неверно. Напр., для исключительной кривой Ена поверхности ( Е, Е)=-1.
, но в общем случае это уже неверно. Напр., для исключительной кривой Ена поверхности ( Е, Е)=-1.
Многими формальными свойствами теории колец Чжоу обладают другие теории: циклы по модулю алгебраической или численной эквивалентности, К-теория, теория сингулярных когомологий  (в случае
(в случае  ), теория l-адических когомологий (см. также Вейля когомологий). Это приводит к аксиоматич. построению теории пересечения как сопоставления каждому многообразию X(из нек-рой категории) кольца С(X).и гомоморфизмов f* и f*, связанных рядом аксиом типа формулы проекции или редукции к диагонали (см. [1]). Сравнение различных П. т. приводит к полезным соотношениям. Напр., в комплексном случае понятие фундаментального цикла позволяет определить гомоморфизм теорий пересечений
), теория l-адических когомологий (см. также Вейля когомологий). Это приводит к аксиоматич. построению теории пересечения как сопоставления каждому многообразию X(из нек-рой категории) кольца С(X).и гомоморфизмов f* и f*, связанных рядом аксиом типа формулы проекции или редукции к диагонали (см. [1]). Сравнение различных П. т. приводит к полезным соотношениям. Напр., в комплексном случае понятие фундаментального цикла позволяет определить гомоморфизм теорий пересечений  , что позволяет использовать трансцендентные методы. Сравнение K-теории и теории Чжоу приводит к теореме Римана — Роха — Гротендика. Важную роль при этом играет поведение П. т. при моноидальном преобразовании (см. [2]). Другое применение П. т. относится к обоснованию исчислительной геометрии Шуберта (см. [3]). Эту ветвь геометрии можно рассматривать как теорию колец Чжоу различных многообразий, классифицирующих геометрич. объекты — многообразия Грассмана, многообразия флагов и т. д.
, что позволяет использовать трансцендентные методы. Сравнение K-теории и теории Чжоу приводит к теореме Римана — Роха — Гротендика. Важную роль при этом играет поведение П. т. при моноидальном преобразовании (см. [2]). Другое применение П. т. относится к обоснованию исчислительной геометрии Шуберта (см. [3]). Эту ветвь геометрии можно рассматривать как теорию колец Чжоу различных многообразий, классифицирующих геометрич. объекты — многообразия Грассмана, многообразия флагов и т. д.
Лит.:[1] Anneaux de Chow et Applications, Seminaire Chevalley, Seer. Math., P., 1958; [2] Mанин Ю. И., Лекции по алгебраической геометрии, ч. 2, М., 1971; [3] Проблемы Гильберта, М., 1969, с. 175-81; [4] Бальдассари М., Алгебраические многообразия, пер. с англ., М., 1961; [5] Серр Ж. <П., «Математика», 1963, т. 7, с. 3-93; [6] Theorie des intersections et theoreme de Riemann — Roch, В.- Hdlb,- N.Y., 1971; [7l Algebraic geometry, Arcata 1974, Providence, 1975; Xартcхорн Р., Алгебраическая геометрия, пер. с англ., М., 1981.
В. И. Данилов.
Математическая энциклопедия. — М.: Советская энциклопедия.
.
1977—1985.