Формулы математического маятника в физике
Формулы математического маятника
Определение и формулы математического маятника
Определение
Математический маятник — это колебательная система, являющаяся частным случаем физического маятника, вся масса которого
сосредоточена в одной точке, центре масс маятника.
Обычно математический маятник представляют как шарик, подвешенный на длинной невесомой и нерастяжимой нити. Это идеализированная система, совершающая гармонические колебания под действием силы тяжести. Хорошим приближением к математическому маятнику массивный маленький шарик, осуществляющий колебания на тонкой длинной нити.
Галилей первым изучал свойства математического маятника, рассматривая качание паникадила на длинной цепи. Он получил, что период колебаний математического маятника не зависит от амплитуды. Если при запуске мятника отклонять его на разные малые углы, то его колебания будут происходить с одним периодом, но разными амплитудами. Это свойство получило название изохронизма.
Уравнение движения математического маятника
Математический маятник — классический пример гармонического осциллятора. Он совершает гармонические колебания, которые описываются дифференциальным уравнением:
[ddot{varphi }+{omega }^2_0varphi =0 left(1right),]
где $varphi $ — угол отклонения нити (подвеса) от положения равновесия.
Решением уравнения (1) является функция $varphi (t):$
[varphi (t)={varphi }_0{cos left({omega }_0t+alpha right)left(2right), }]
где $alpha $ — начальная фаза колебаний; ${varphi }_0$ — амплитуда колебаний; ${omega }_0$ — циклическая частота.
Колебания гармонического осциллятора — это важный пример периодического движения. Осциллятор служит моделью во многих задачах классической и квантовой механики.
Циклическая частота и период колебаний математического маятника
Циклическая частота математического маятника зависит только от длины его подвеса:
[ {omega }_0=sqrt{frac{g}{l}}left(3right).]
Период колебаний математического маятника ($T$) в этом случае равен:
[T=frac{2pi }{{omega }_0}=2pi sqrt{frac{l}{g}}left(4right).]
Выражение (4) показывает, что период математического маятника зависит только от длины его подвеса (расстояния от точки подвеса до центра тяжести груза) и ускорения свободного падения.
Уравнение энергии для математического маятника
При рассмотрении колебаний механических систем с одной степенью свободы часто берут в качестве исходного не уравнения движения Ньютона, а уравнение энергии. Так как его проще составлять, и оно является уравнением первого порядка по времени. Предположим, что трение в системе отсутствует. Закон сохранения энергии для совершающего свободные колебания математического маятника (колебания малые) запишем как:
[E=E_k+E_p=frac{mv^2}{2}+mgh=frac{mv^2}{2}+frac{mgx^2}{2l}=constleft(5right),]
где $E_k$ — кинетическая энергия маятника; $E_p$ — потенциальная энергия маятника; $v$ — скорость движения маятника; $x$ — линейное смещение груза маятника от положения равновесия по дуге окружности радиуса $l$, при этом угол — смещение связан с $x$ как:
[varphi =frac{x}{l}left(6right).]
Максимальное значение потенциальной энергии математического маятника равно:
[E_{pmax}=mgh_m=frac{mg{x^2}_m}{2l}left(7right);;]
Максимальная величина кинетической энергии:
[E_{kmax}=frac{mv^2_m}{2}=frac{m{omega }^2_0{x^2}_m}{2l}=E_{pmax}left(8right),]
где $h_m$ — максимальная высота подъема маятника; $x_m$- максимальное отклонение маятника от положения равновесия; $v_m={omega }_0x_m$ — максимальная скорость.
Примеры задач с решением
Пример 1
Задание. Какова максимальная высота подъема шарика математического маятника, если его скорость движения при прохождении положения равновесия составляла $v$?
Решение. Сделаем рисунок.
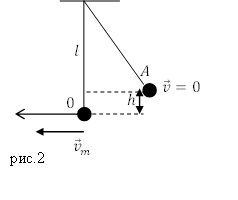
Пусть ноль потенциальной энергии шарика в его положении равновесия (точка 0).В этой точке скорость шарика максимальна и равна по условию задачи $v$. В точке максимального подъема шарика над положением равновесия (точка A), скорость шарика равна нулю, потенциальная энергия максимальна. Запишем закон сохранения энергии для рассмотренных двух положений шарика:
[frac{mv^2}{2}=mgh left(1.1right).]
Из уравнения (1.1) найдем искомую высоту:
[h=frac{v^2}{2g}.]
Ответ. $h=frac{v^2}{2g}$
Пример 2
Задание. Каково ускорение силы тяжести, если математический маятник имеющий длину $l=1 м$, совершает колебания с периодом равным $T=2 с$? Считайте колебания математического маятника малыми.textit{}
Решение. За основу решения задачи примем формулу для вычисления периода малых колебаний:
[T=2pi sqrt{frac{l}{g}}left(2.1right).]
Выразим из нее ускорение:
[g=frac{4{pi }^2l}{T^2} .]
Проведем вычисления ускорения силы тяжести:
[g=frac{4{pi }^2cdot 1}{2^2}={pi }^2approx 9,87 left(frac{м}{с^2}right).]
Ответ. $g=9,87 frac{м}{с^2}$
Читать дальше: формулы пружинного маятника.

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 430 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!

Здравствуйте дорогие форумчане, наткнулся на несколько задач которые не смог решить. И прошу помочь с решением одной из них:
Задача: Маятник колеблиться с амплитудой 0,5м. Определить перемещение маятника за половину периода.
Решение: Ниже я прилагаю скриншот того, как я понял работу периода маятника. Однако где половина амплитуды, а где она в целом я не понял.
1) Маятник начинает свое движение слева направо(для меня так удобнее было), как только достигает до противоположной стороны совершается половина периода. Ну т.е. проходит пол периода. Далее 2) маятник с правой стороны перемещается в свою первоначальную точку делая полный(целый) период. По середине в обоих случаях вы видите что имеются Т2 и 3Т4 в качестве половинных значений периодов. Правильно ли я понял суть расчета периода? А как работает амплитуда, в какой точке в скриншотах находится половина амплитуды(А2), а в какой А?
Поэтому я и не смог решить эту задачу.
Перемещение — маятник
Cтраница 1
Перемещение маятника пропорционально замедлению и отмечается по отградуированной шкале прибора.
[1]
За перемещением ведущего маятника наблюдают при помощи зеркальной оптической системы по движению светящейся точки на специальном экране.
[2]
Замедление автомобиля определяют при помощи де-селерометра ( модель 1155 м) — прибора, работа которого основана на перемещении маятника под действием силы инерции при торможении автомобиля.
[3]
Избыточные координаты q и q % определяют перемещения обоих маятников в направлениях, указанных на рис. 1, а координаты 7з и / 4 задают избыточные перемещения только нижнего маятника.
[4]
Подвеска верхнего зажима на цепочке обеспечивает постоянство короткого плеча на повороте маятника. Верхний зажим при перемещении маятника с грузом всегда находится в вертикальном положении.
[5]
Одновременность действия тормозных механизмов правых и левых колес оценивается тем, что для сохранения прямолинейного направления в процессе торможения водитель не должен исправлять траекторию движения. При дорожных испытаниях для определения замедления применяют деселерометр, работа которого основана на принципе перемещения маятника, величина которого пропорциональна замедлению при торможении автомобиля. Деселерометр крепится к лобовому или боковому стеклу с помощью присосок.
[7]
Одновременность действия тормозных механизмов правых и левых колес оценивается тем, что для сохранения прямолинейного направления в процессе торможения водитель не должен исправлять траекторию движения. При дорожных испытаниях для определения замедления применяют деселе-рометр, работа которого основана на принципе перемещения маятника. Величина перемещения маятника пропорциональна замедлению при торможении автомобиля. Деселерометр крепится к лобовому или боковому стеклу с помощью присосок.
[9]
Гистерезис незначительный ( менее 0 01 % всей шкалы), так как главной восстанавливающей силой, действующей на маятник, является сила тяжести. Якорь, представляющий часть системы, действует в магнитном поле двух катушек, и служит индуктивным датчиком перемещений маятника. Прибор спроектирован для совместного действия со специальной системой амплитудной модуляции, в которой часть выходной величины прибора дифференцируется в электромагнитной цепи акселерометра.
[11]
Аппаратура автоматического управления опытом должна быть очень точной и надежной. Для этой цели употребляются переключающие устройства маятникового или барабанного типа, в которых контакты располагаются по дуге перемещения маятника либо вокруг барабана, вращающегося с постоянной скоростью. Управление опытом может также осуществляться с помощью электронных блоков.
[13]
Одновременность действия тормозных механизмов правых и левых колес оценивается тем, что для сохранения прямолинейного направления в процессе торможения водитель не должен исправлять траекторию движения. При дорожных испытаниях для определения замедления применяют деселе-рометр, работа которого основана на принципе перемещения маятника. Величина перемещения маятника пропорциональна замедлению при торможении автомобиля. Деселерометр крепится к лобовому или боковому стеклу с помощью присосок.
[14]
Для обеспечения устойчивости и нужного качества процесса регулирования в системе предусматриваются корректирующие внутренние обратные связи. Жесткая отрицательная обратная связь, охватывающая вспомогательный сервомотор 15 и сервомотор 19, придает системе статический характер. Для обеспечения жесткой отрицательной обратной связи вал 15 поворачивается так, чтобы золотник 13 перемещался в сторону, противоположную перемещению маятника. В установившемся состоянии, когда колебания в системе затухнут и сервомоторы будут неподвижны, регулирующий орган 25 будет занимать новое положение, соответствующее новому значению нагрузки. Поршни сервомотора 19 и конец В золотникового рычага 6, имеющие жесткую механическую связь, будут также занимать новые положения, отличные от тех, с которых начался процесс регулирования. Вследствие этого конец А золотникового рычага 6 в установившемся режиме приходит к исходному состоянию. Следовательно, точка С, или штифт 5, а также маятник 3 будут занимать положения, не совпадающие с первоначальными и соответствующие новому значению угловой скорости турбины. Это означает, что отклонение регулируемой величины отлично от нуля и рассмотренная система является статической по возмущающему воздействию. Величину статизма можно изменять, перемещая ползунок 14 и изменяя тем самым длину рычага.
[15]
Страницы:
1
2
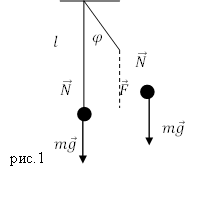
Математическим маятником называют материальную точку (тело небольших размеров), подвешенную на тонкой невесомой нерастяжимой нити или на невесомом стержне.

Рис. (1). Силы, действующие на материальную точку в положении равновесия и при отклонении от положения равновесия
В положении равновесия сила тяжести и сила упругости нити уравновешивают друг друга, и материальная точка находится в покое.
При отклонении материальной точки от положения равновесия на малый угол
α
на тело будет действовать возвращающая сила (F), которая является тангенциальной составляющей силы тяжести:
Эта сила сообщает материальной точке тангенциальное ускорение, направленное по касательной к траектории, и материальная точка начинает двигаться к положению равновесия с возрастающей скоростью. По мере приближения к положению равновесия возвращающая сила, а следовательно, и тангенциальное ускорение точки уменьшаются. В момент прохождения положения равновесия угол отклонения
α
(=0), тангенциальное ускорение также равно нулю, а скорость материальной точки максимальна.
Далее материальная точка проходит по инерции положение равновесия и, двигаясь далее, сбавляет скорость. В крайнем положении материальная точка останавливается и затем начинает двигаться в обратном направлении.
Период малых собственных колебаний математического маятника длины (l), неподвижно подвешенного в однородном поле тяжести с ускорением свободного падения (g), равен
Обрати внимание!
Период колебаний математического маятника не зависит от амплитуды колебаний и массы груза.
Наиболее известным практическим использованием маятника является применение его в часах для измерения времени. Впервые это сделал голландский физик X. Гюйгенс.

Рис. (2). Колебания маятника часов
Поскольку период колебаний маятника зависит от ускорения свободного падения (g), то часы, которые идут верно в Москве, будут идти вперёд в Санкт-Петербурге. Чтобы эти часы шли верно в Санкт-Петербурге, приведённую длину их маятника нужно увеличить.
В геологии маятник применяют для опытного определения числового значения ускорения свободного падения (g) в разных точках земной поверхности. Для этого по достаточно большому числу колебаний маятника в том месте, где измеряют (g), находят период его колебаний, а затем вычисляют ускорение свободного падения, выразив его из формулы периода маятника.
Заметное отклонение величины (g) от нормы для какой-либо местности называют гравитационной аномалией.
Определение аномалий помогает находить залежи полезных ископаемых.
Опыт показывает, что качающийся маятник сохраняет плоскость, в которой происходят его колебания. Это означает, что если привести в движение маятник, установленный на диске центробежной машины, а диск заставить вращаться, то плоскость качания маятника относительно комнаты изменяться не будет. Это позволяет с помощью опыта обнаружить вращение Земли вокруг своей оси.
В (1850) г. Ж. Фуко подвесил маятник под куполом высокого здания так, что острие маятника при качании оставляло след на песке, насыпанном на полу. Оказалось, что при каждом качании острие оставляет на песке новый след. Таким образом, опыт Фуко показал, что Земля вращается вокруг своей оси. В условиях вращения Земли при достаточно большой нити подвеса плоскость, в которой маятник совершает колебания, медленно поворачивается относительно земной поверхности в сторону, противоположную направлению вращения Земли.
При исследовании гармонических колебаний твердого тела, которое не моделируют в виде материальной точки, рассматривают физический маятник.
Источники:
Рис. 1. Силы, действующие на материальную точку в положении равновесия и при отклонении от положения равновесия. . © ЯКласс.
Рис. 2. Колебания маятника часов. ЮК, Public domain, via Wikimedia Commons. 2021-08-29.
Содержание:
Пружинные и математические маятники:
Тело или система тел, совершающие периодические колебательные движения, называются маятниками. Большинство колебательных движений, встречающихся в природе, напоминают движение пружинных и математических маятников.
Система, состоящая из груза массой 

Если немножко растянуть пружину и отпустить, то груз придет в колебательное движение в вертикальном направлении.
С помощью опытов мы определили, что смещение груза в зависимости от времени изменяется следующbм образом:
Если учесть, что ускорение тела, совершающего гармонические колебания  , то уравнение (5.10) примет вид:
, то уравнение (5.10) примет вид:
Из этого уравнения мы имеем:

Значит, частота циклического колебания тела, совершающего гармоническое колебание, зависит от параметров тел, входящих в систему колебания. Формула (5.12) называется формулой для
определения циклической (периодической) частоты пружинного маятника .
.
Период колебания пружинного маятника прямо пропорционален выведенному из-под квадратного корня значению массы груза и обратно пропорционален выведенному из-под квадратного корня значению упругости пружины.
Рассмотрим обмен энергиями в пружинном маятнике. Кинетическая энергия маятника, если не учитывать массу пружины, равна кинетической энергии груза,  . В предыдущих темах было показано, что скорость можно выразить формулой
. В предыдущих темах было показано, что скорость можно выразить формулой  . В таком случае кинетическая энергия маятника равна
. В таком случае кинетическая энергия маятника равна

Потенциальная энергия пружинного маятника равна энергии деформации пружины, т.е.:

В большинстве случаев важно знать полную энергию системы:

Если учесть, что  ,
,


Обратите внимание, что полная энергия пружинного маятника является постоянной величиной, не зависящей от времени, т.е. соблюдается выполнение закона сохранения механической энергии.
Материальная точка, подвешенная на нерастяжимой и невесомой нити и совершающая периодическое колебательное движение вокруг равновесного состояния, называется математическим маятником.
Когда маятник находится в устойчивом равновесном состоянии, вес материальной точки  уравновешивает силу натяжения
уравновешивает силу натяжения  (рис. 5.4), так как их модули равны и направлены по одной линии в противоположные стороны. Если наклонить маятник на угол
(рис. 5.4), так как их модули равны и направлены по одной линии в противоположные стороны. Если наклонить маятник на угол  , силы
, силы  и не смогут уравновесить друг друга из-за взаимного расположения под углом. В результате сложения таких сил появится возвращающая сила, которая вернет маятник в равновесное состояние. Если отпустить маятник, то под воздействием возвращающей силы он начинает двигаться в сторону равновесного состояния.
и не смогут уравновесить друг друга из-за взаимного расположения под углом. В результате сложения таких сил появится возвращающая сила, которая вернет маятник в равновесное состояние. Если отпустить маятник, то под воздействием возвращающей силы он начинает двигаться в сторону равновесного состояния.
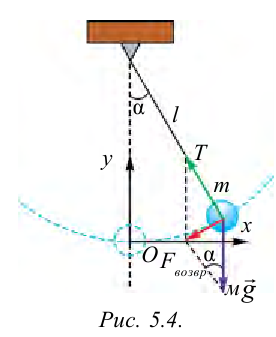
Из рис. 5.4. видим, что:

Согласно второму закону Ньютона, сила  придает материальной точке ускорение
придает материальной точке ускорение  , поэтому
, поэтому

Из-за того, что угол наклона очень маленький  , а сила
, а сила  направлена противоположно смещению, формулу (5.19) можно записать в виде
направлена противоположно смещению, формулу (5.19) можно записать в виде

Если смещение материальной точки (шарика) во время колебательного процесса отметить буквой  и учитывать соотношение
и учитывать соотношение  , получим
, получим 
Следовательно 
Исходя из смысла периода колебания и учитывая, что  получаем
получаем

Эта формула, определяющая период колебания математического маятника, называется формулой Гюйгенса. Отсюда вытекают следующие законы математического маятника:
- при маленьких углах наклона (а) математического маятника, его период колебания не зависит от амплитуды колебания.
- период колебания математического маятника также не зависит от массы подвешенного на него груза;
- период колебания математического маятника прямо пропорционален выведенному из-под квадратного корня значению длины маятника и обратно пропорционален выведенному из-под квадратного корня значению ускорения свободного падения.
Отсюда колебание математического маятника записывается следующим выражением:
Следует отметить, что когда амплитуда колебания или угол наклона велики, колебания математического маятника не являются гармоническим. В этом случае нельзя считать  и для решения уравнения движения не применяется закон синусов или косинусов.
и для решения уравнения движения не применяется закон синусов или косинусов.
Пример:
Период колебания первого маятника равен 3 сек, второго – 4 сек. Найдите период колебания маятника с длиной, равной сумме длин этих маятников.
Дано:
Найти:

Формула:
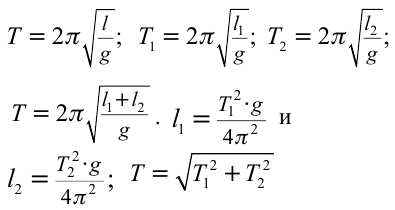
Решение:
Ответ: 5 cек.
Пружинный и математический маятники
Второй закон Ньютона (основной закон динамики): ускорение, приобретаемое материальной точкой, прямо пропорционально равнодействующей всех сил, действующих на нее, и обратно пропорционально массе материальной точки:
Закон Гука: модуль силы упругости  , возникающей в теле при упругих деформациях, прямо пропорционален его абсолютному удлинению (сжатию)
, возникающей в теле при упругих деформациях, прямо пропорционален его абсолютному удлинению (сжатию)  :
:

где k — жесткость тела,  — длина недеформированного тела, l — длина деформированного тела.
— длина недеформированного тела, l — длина деформированного тела.
Рассмотрим пружинный маятник, представляющий собой колебательную систему, образованную грузом на пружине.
Пусть груз массой т, лежащий на гладкой горизонтальной поверхности, прикреплен к свободному концу невесомой пружины жесткостью k (рис. 3). Второй конец пружины закреплен относительно данной инерциальной системы отсчета (ИСО).
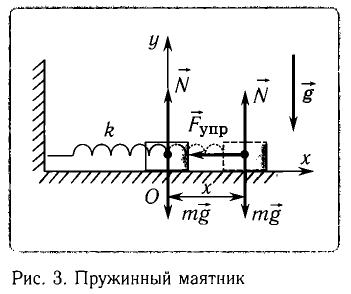
Выведем груз из положения равновесия, сместив его на расстояние х вправо. В пружине возникнет сила упругости  направленная влево.
направленная влево.
Запишем второй закон Ньютона для движения груза:

В проекции на ось Ох действующих на груз сил с учетом закона Гука получаем
 или
или 
Следовательно,
Это уравнение аналогично уравнению гармонических колебаний
Сравнивая эти два уравнения, находим циклическую частоту колебаний пружинного маятника:
Тогда период колебаний пружинного маятника можно найти по формуле
Как следует из полученной формулы, период колебаний пружинного маятника не зависит от амплитуды его колебаний (в пределах выполнимости закона Гука).
Свойство независимости периода колебаний маятника от амплитуды называется изохронностью (от греческих слов  , — равный и
, — равный и  — время). Таким образом, колебания пружинного маятника обладают свойством изохронности.
— время). Таким образом, колебания пружинного маятника обладают свойством изохронности.
Изохронность колебаний маятника была открыта Галилео Галилеем в 1583 г. при изучении движения грузика, подвешенного на нити. Моделью данной колебательной системы является математический маятник.
Математическим маятником называется материальная точка массой т, подвешенная на невесомой нерастяжимой нити длиной l в поле каких-либо сил, например силы тяжести Земли (рис. 4).
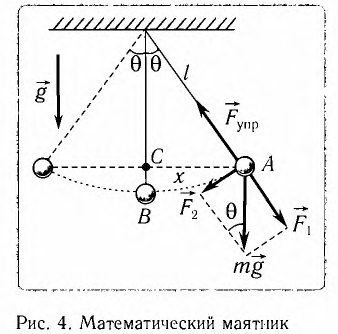
Математический маятник — это идеализированная модель реального маятника при условии, что длина нити намного больше размеров подвешенного на ней тела и масса нити намного меньше массы тела. Кроме того, деформацией нити можно пренебречь.
Галилео Галилей экспериментально определил, что период малых колебаний (9 < 10°) математического маятника в поле силы тяжести не зависит от его массы и амплитуды колебаний (угла начального отклонения  ). Он установил также, что период этих колебаний прямо пропорционален
). Он установил также, что период этих колебаний прямо пропорционален  .
.
Период малых колебаний математического маятника в поле силы тяжести Земли определяется по формуле Гюйгенса:
При углах отклонения математического маятника  20° погрешность расчета периода колебаний математического маятника по формуле Гюйгенса не превышает 1 %.
20° погрешность расчета периода колебаний математического маятника по формуле Гюйгенса не превышает 1 %.
Отклонение маятника от положения равновесия будем характеризовать углом (см. рис. 4), который нить образует с вертикалью.
Согласно второму закону Ньютона для движения шарика можем записать:

Смещение маятника вдоль дуги х = l, где угол выражен в радианах. Возвращающей силой в данном случае является проекция  силы тяжести на касательную к дуге (см. рис. 4), которая определяется по формуле:
силы тяжести на касательную к дуге (см. рис. 4), которая определяется по формуле:
Заметим, что при малых углах и длина дуги
и длина дуги
 очень мало отличается от длины хорды
очень мало отличается от длины хорды  Для небольших углов (до 10°) значения и sin различаются меньше чем на I %. Поэтому для таких углов равенство
Для небольших углов (до 10°) значения и sin различаются меньше чем на I %. Поэтому для таких углов равенство
 (1)
(1)
является очень хорошим приближением.
Подставляя в выражение (1) значение , получим
, получим
Таким образом, уравнение движения маятника запишется в виде

Поскольку полученное уравнение совпадает с уравнением гармонических колебаний  , то можно сделать вывод, что при малых отклонениях маятник совершает гармонические колебания с циклической частотой
, то можно сделать вывод, что при малых отклонениях маятник совершает гармонические колебания с циклической частотой
Как видно из этой формулы, циклическая частота не зависит от массы маятника и амплитуды его колебаний, а определяется только его длиной и ускорением свободного падения.
В общем случае, когда маятник находится в однородных полях нескольких сил, для определения периода колебаний следует ввести «эффективное ускорение»  , характеризующее результирующее действие этих полей, и период колебаний маятника будет определяться по формуле
, характеризующее результирующее действие этих полей, и период колебаний маятника будет определяться по формуле
Пример:
Определите амплитуду А, циклическую частоту  , период Т и начальную фазу
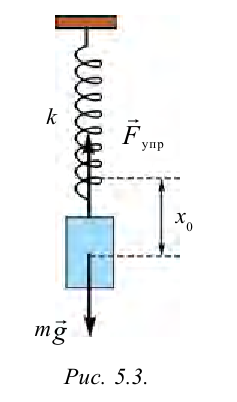
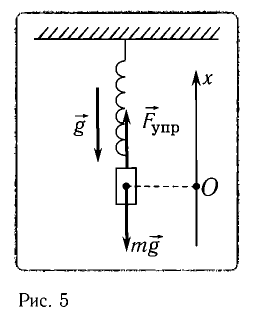
, период Т и начальную фазу  колебаний тела массой m = 0,50 кг, подвешенного к вертикальной пружине (рис. 5). Известно, что в состоянии покоя тело растягивает пружину на
колебаний тела массой m = 0,50 кг, подвешенного к вертикальной пружине (рис. 5). Известно, что в состоянии покоя тело растягивает пружину на  = 10 мм и для возбуждения колебаний его смещают вниз на x = 30 мм и отпускают.
= 10 мм и для возбуждения колебаний его смещают вниз на x = 30 мм и отпускают.
Решение
Циклическая частота колебаний «вертикального» пружинного маятника также определяется по формуле
Найдем жесткость k пружины. Из условия равновесия тела следует
По закону Гука
В проекции на ось Ох условие равновесия запишется в виде:
Отсюда для циклической частоты  получаем
получаем

Так как по условию задачи тело сместили на расстояние х = 30 мм от положения равновесия, то амплитуда его колебаний

Период колебаний находим из соотношения
Поскольку в начальный момент времени тело было смещено на максимальную величину, то начальная фаза колебаний 
Ответ: 
Пример:
Металлический шарик, подвешенный на длинной легкой нерастяжимой нити, поднимают по вертикали до точки подвеса и отпускают. Затем нить маятника отклоняют на небольшой угол от вертикали и также отпускают. В каком из этих случаев шарик быстрее возвратится в начальное положение?
Решение
В первом случае шарик свободно падает без начальной скорости с высоты h = l, следовательно,
Отсюда находим промежуток времени  , необходимый для возвращения шарика в начальное положение:
, необходимый для возвращения шарика в начальное положение:
Во втором случае промежуток времени  , необходимый шарику для возвращения из отклоненного положения в положение равновесия, найдем из уравнения гармонических колебаний
, необходимый шарику для возвращения из отклоненного положения в положение равновесия, найдем из уравнения гармонических колебаний

Поскольку в начальный момент времени t = 0 маятник имеет максимальное
отклонение от положения равновесия, то начальная фаза колебаний  Так как в положении равновесия x = 0, то
Так как в положении равновесия x = 0, то

Используя формулу для периода колебаний математического маятника
 находим
находим 
Разделив почленно уравнения для промежутков времени  получим
получим
Ответ: шарик быстрее возвратится в начальное положение в случае, когда он движется вертикально вниз.
Пример:
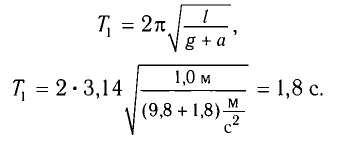
Найдите периоды колебаний математического маятника длиной l= 1,0 м при перемещении его точки подвеса с ускорением, модуль которого а =  , направленным: а) вертикально вверх; б) вертикально вниз.
, направленным: а) вертикально вверх; б) вертикально вниз.
Решение
Период колебаний математического маятника в поле силы тяжести Земли
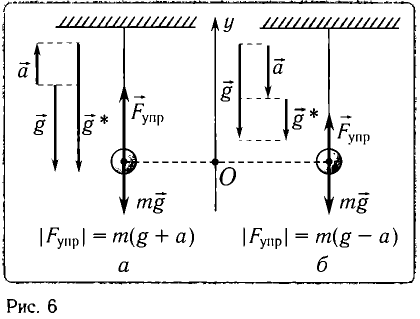
а) При движении маятника с ускорением  , направленным вверх (рис. 6, а), уравнение движения вдоль оси Оу
, направленным вверх (рис. 6, а), уравнение движения вдоль оси Оу
где Fy — проекция силы упругости нити.
Откуда находим

где g* = g + а — «эффективное ускорение».
Период колебаний определяется по формуле
б) При движении точки подвеса маятника с ускорением  , направленным вниз (рис. 6, б), уравнение движения вдоль оси Оу
, направленным вниз (рис. 6, б), уравнение движения вдоль оси Оу
где Fy — проекция силы упругости нити. Откуда находим

где g*=g-a — «эффективное ускорение». Период колебаний
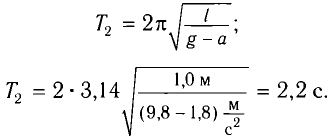
Ответ: 
Что такое пружинный и математический маятники
Второй закон Ньютона (основной закон динамики): ускорение тела прямо пропорционально результирующей силе и обратно пропорционально массе тела:
Закон Гука: при упругих деформациях сжатия и растяжения модуль силы упругости прямо пропорционален модулю изменения длины тела:

где  — жесткость тела,
— жесткость тела,  — длина недеформированного тела,
— длина недеформированного тела,  -длина деформированного тела.
-длина деформированного тела.
Колебательная система, состоящая из тела с прикрепленной к нему пружиной, называется пружинным маятником. Пружина может располагаться как вертикально (вертикальный пружинный маятник), так и горизонтально (горизонтальный пружинный маятник).
Рассмотрим колебания горизонтального пружинного маятника. Пусть груз массой  лежащий на гладкой горизонтальной поверхности, прикреплен к свободному концу легкой (невесомой) пружины жесткостью
лежащий на гладкой горизонтальной поверхности, прикреплен к свободному концу легкой (невесомой) пружины жесткостью  (рис. 6). Второй конец пружины неподвижен относительно данной инерциальной системы отсчета (ИСО).
(рис. 6). Второй конец пружины неподвижен относительно данной инерциальной системы отсчета (ИСО).
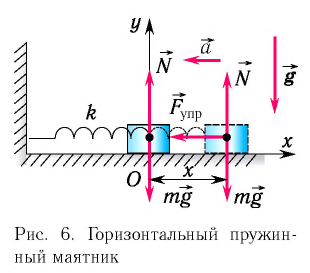
Выведем груз из положения равновесия, сместив его на расстояние  вправо (см. рис. 6). Тогда в пружине возникнет сила упругости
вправо (см. рис. 6). Тогда в пружине возникнет сила упругости  действующая на груз и направленная влево.
действующая на груз и направленная влево.
Согласно второму закону Ньютона для движения груза

В проекции на ось  действующих на груз сил (см. рис. 6) с учетом закона Гука получаем:
действующих на груз сил (см. рис. 6) с учетом закона Гука получаем:

или
Перепишем полученное соотношение в виде:
которое является уравнением гармонических колебаний пружинного маятника.
Сравнивая (1) с уравнением гармонических колебаний  находим циклическую частоту колебаний горизонтального пружинного маятника
находим циклическую частоту колебаний горизонтального пружинного маятника

которая определяется массой  груза и жесткостью
груза и жесткостью  пружины.
пружины.
Для нахождения периода колебаний пружинного маятника воспользуемся формулой  подставив в нее выражение (2):
подставив в нее выражение (2):
Как следует из формул (2) и (3), период и частота колебаний пружинного маятника не зависят от амплитуды его колебаний (в пределах выполнимости закона Гука).
Свойство независимости периода колебаний маятника от амплитуды называется изохронностью (от греч.  (изос) — равный и
(изос) — равный и  (хронос) — время). Следовательно, колебания пружинного маятника обладают свойством изохронности.
(хронос) — время). Следовательно, колебания пружинного маятника обладают свойством изохронности.
Изохронность колебаний маятника была открыта Гали-лео Галилеем в 1583 г. при изучении движения груза, подвешенного на нити. Моделью данной колебательной системы является математический маятник.
Колебательная система, состоящая из находящегося в поле силы тяжести тела, подвешенного на легкой нерастяжимой нити, размеры которого малы по сравнению с длиной нити, а его масса значительно больше массы нити, называется математическим маятником. При таких условиях тело можно считать материальной точкой, а нить — легкой нерастяжимой (рис. 7).
Рассмотрим колебания математического маятника.
Отклонение маятника от положения равновесия будем характеризовать углом  (см. рис. 7), который нить образует с вертикалью.
(см. рис. 7), который нить образует с вертикалью.
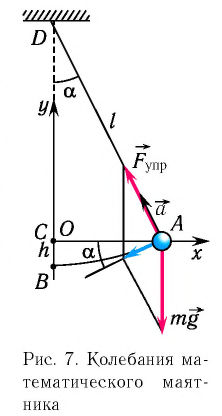
После отклонения маятника на него действуют две силы: направленная вертикально вниз сила тяжести  и направленная вдоль нити сила упругости
и направленная вдоль нити сила упругости  Под действием этих сил тело движется по дуге окружности к устойчивому положению равновесия.
Под действием этих сил тело движется по дуге окружности к устойчивому положению равновесия.
Согласно второму закону Ньютона для движения маятника можем записать:
В проекциях на выбранные оси координат  (см. рис. 7) получаем:
(см. рис. 7) получаем:
Для углов отклонения  значения
значения  различаются меньше чем на 1 %. Поэтому при малых углах отклонения
различаются меньше чем на 1 %. Поэтому при малых углах отклонения  и длина дуги
и длина дуги  очень мало отличается от длины хорды
очень мало отличается от длины хорды  где угол
где угол  выражен в радианах. Тогда смещение маятника вдоль дуги
выражен в радианах. Тогда смещение маятника вдоль дуги  Но практически маятник движется вдоль оси
Но практически маятник движется вдоль оси  Из
Из  находим
находим  и, подставив это выражение в (5), получим:
и, подставив это выражение в (5), получим:

Таким образом, силой, возвращающей маятник к устойчивому положению равновесия, является сила упругости его нити.
При малых углах отклонения маятника проекция вектора ускорения  и ею можно пренебречь, а
и ею можно пренебречь, а  тогда из уравнения (6) следует, что
тогда из уравнения (6) следует, что 
Следовательно, уравнение движения маятника вдоль оси  запишется в виде:
запишется в виде:
где  — ускорение, сообщаемое грузу маятника силой упругости нити.
— ускорение, сообщаемое грузу маятника силой упругости нити.
Отсюда получаем уравнение гармонических колебаний математического маятника:
При сравнении уравнения (8) с уравнением гармонических колебаний  можно сделать вывод, что при малых отклонениях математический маятник совершает гармонические колебания с циклической частотой
можно сделать вывод, что при малых отклонениях математический маятник совершает гармонические колебания с циклической частотой

Тогда период малых колебаний математического маятника в поле тяжести Земли определяется по формуле Гюйгенса:
которую впервые получил ученик И. Ньютона Христиан Гюйгенс.
При углах отклонения математического маятника  погрешность рас-чета периода колебаний математического маятника по формуле Гюйгенса не превышает 1 %.
погрешность рас-чета периода колебаний математического маятника по формуле Гюйгенса не превышает 1 %.
Как видно из формул (9) и (10), циклическая частота и период математического маятника не зависят от массы маятника и амплитуды его колебаний, а определяются только его длиной  и модулем ускорения свободного падения
и модулем ускорения свободного падения 
Галилео Галилей первый экспериментально определил, что период малых колебаний  математического маятника длиной
математического маятника длиной  в поле силы тяжести не зависит от его массы
в поле силы тяжести не зависит от его массы  и амплитуды колебаний (угла начального отклонения
и амплитуды колебаний (угла начального отклонения  Он установил также, что период этих колебаний прямо пропорционален
Он установил также, что период этих колебаний прямо пропорционален 
Если маятник приобретает дополнительное ускорение  обусловленное, например, ускоренным движением точки подвеса, то при этом будет изменяться сила упругости нити. В таком случае период колебаний маятника будет определяться по формуле:
обусловленное, например, ускоренным движением точки подвеса, то при этом будет изменяться сила упругости нити. В таком случае период колебаний маятника будет определяться по формуле:
где  — «эффективное ускорение», равное векторной разности
— «эффективное ускорение», равное векторной разности 
- Заказать решение задач по физике
Пример:
Выведите формулу для периода колебаний вертикального пружинного маятника, если масса груза  и жесткость пружины
и жесткость пружины 
Решение
Рассмотрим вертикальное движение груза, происходящее под действием силы упругости пружины и силы тяжести груза после толчка. Начало координат поместим в точку, соответствующую равновесному положению тела (рис. 8). В этом положении пружина растянута на величину  определяемую соотношением:
определяемую соотношением:

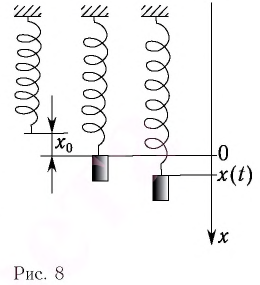
При смещении груза на величину  из положения равновесия сила, действующая со стороны пружины на груз, равна
из положения равновесия сила, действующая со стороны пружины на груз, равна 
Тогда по второму закону Ньютона

С учетом соотношения (1) это уравнение перепишем в виде:
Если ввести обозначение  то уравнение движения груза запишется в виде:
то уравнение движения груза запишется в виде:
Оно описывает гармонические колебания вертикального пружинного маятника с частотой такой же, как у горизонтального пружинного маятника. Следовательно, период колебаний вертикального пружинного маятника такой же, как и горизонтального:
Ответ: 
Таким образом, действующая в колебательной системе постоянная сила только смещает положения равновесия, но не изменяет частоту колебаний.
Пример:
Определите амплитуду  циклическую частоту
циклическую частоту  период
период  и начальную фазу
и начальную фазу  колебаний тела массой
колебаний тела массой  г подвешенного к вертикальной пружине (рис. 9). Известно, что в состоянии покоя тело растягивает пружину на расстояние
г подвешенного к вертикальной пружине (рис. 9). Известно, что в состоянии покоя тело растягивает пружину на расстояние  мм и для возбуждения колебаний его смещают вниз на расстояние
мм и для возбуждения колебаний его смещают вниз на расстояние  мм от положения равновесия и отпускают.
мм от положения равновесия и отпускают.
Дано:
Решение
Циклическая частота колебаний вертикального пружинного маятника так же, как и горизонтального, определяется по формуле (см. пример 1):

Для нахождения жесткости к пружины запишем условие равновесия тела:
По закону Гука
В проекции на ось  условие равновесия запишется:
условие равновесия запишется:
Отсюда для циклической частоты  получаем:
получаем:

Амплитуда колебаний маятника определяется начальным смешением:

Период колебаний находим из соотношения:
Поскольку в начальный момент времени тело было смещено на максимальную величину, то начальная фаза колебаний 
Ответ: 
Подробное объяснение пружинного и математического маятника
Второй закон Ньютона (основной закон динамики): ускорение, приобретаемое материальной точкой, прямо пропорционально равнодействующей всех сил, действующих на нее, и обратно пропорционально массе материальной точки:
Закон Гука: модуль силы упругости  возникающей в теле при упругих деформациях, прямо пропорционален его абсолютному удлинению (сжатию)
возникающей в теле при упругих деформациях, прямо пропорционален его абсолютному удлинению (сжатию) 

где k — жесткость тела,  — длина недеформированного тела, l — длина деформированного тела.
— длина недеформированного тела, l — длина деформированного тела.
Простейшая колебательная система может быть получена с использованием груза и пружины.
Прикрепим груз массой m, лежащий на гладкой горизонтальной поверхности, к невесомой упругой пружине жесткостью k, второй конец которой зафиксирован (рис. 181). Такая система называется пружинным маятником.
Запишем второй закон Ньютона для этой системы

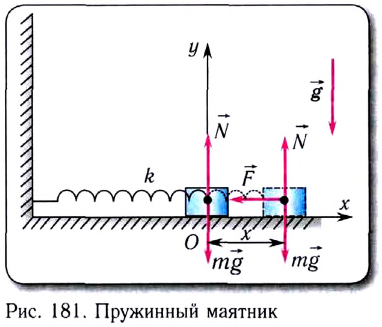
В проекции на ось Ох с учетом закона Гука получаем
 или
или
Запишем это уравнение в форме, аналогичной уравнению движения гармонического осциллятора:
Сравнивая полученное выражение с уравнением гармонических колебаний
находим циклическую частоту колебаний пружинного маятника
Тогда период колебаний пружинного маятника можно найти по формуле
Свойство независимости периода колебаний маятника от амплитуды, открытое Галилеем, называется изохронностью (от греческих слов  — равный и
— равный и  — время).
— время).
Как видим, пружинный маятник обладает свойством изохронности, поскольку период его колебаний не зависит от амплитуды.
Одной из наиболее распространенных колебательных систем является математический маятник.
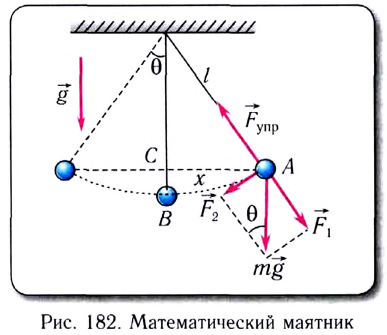
Математическим маятником называется материальная точка массой m, подвешенная на невесомой нерастяжимой нити длиной l в поле каких-либо сил, например силы тяжести Земли (рис. 182).
Галилео Галилей экспериментально установил, что период колебаний математического маятника в поле силы тяжести не зависит от его массы и амплитуды колебаний (угла начального отклонения). Он установил также, что период колебаний прямо пропорционален 
Период малых колебаний математического маятника в поле силы тяжести Земли определяется по формуле Гюйгенса:
При углах отклонения математического маятника  погрешность формулы Гюйгенса не превышает 1 %.
погрешность формулы Гюйгенса не превышает 1 %.
Отклонение маятника от положения равновесия будем характеризовать углом  который нить образует с вертикалью.
который нить образует с вертикалью.
Из второго закона Ньютона следует (см. рис. 182):
Смещение маятника вдоль дуги  где угол
где угол  выражен в радианах.
выражен в радианах.
Возвращающей силой в данном случае является проекция на касательную к дуге силы тяжести  (см. рис. 182), которая определяется по формуле
(см. рис. 182), которая определяется по формуле
Заметим, что при малых углах  длина дуги АВ = х =
длина дуги АВ = х =  очень мало отличается от длины хорды
очень мало отличается от длины хорды  так как при малых
так как при малых 
Для небольших углов (до 10°) значения  различаются меньше чем на 1 %. Поэтому для таких углов равенство
различаются меньше чем на 1 %. Поэтому для таких углов равенство
 является очень хорошим приближением.
является очень хорошим приближением.
Используя полученное соотношение между координатой х и углом  находим
находим  Подставляем его в выражение для проекции силы:
Подставляем его в выражение для проекции силы:
Таким образом, уравнение движения маятника запишется в виде 
Поскольку полученное уравнение совпадает с уравнением гармонических колебаний  то можно сделать вывод, что при малых отклонениях маятник совершает гармонические колебания с циклической частотой
то можно сделать вывод, что при малых отклонениях маятник совершает гармонические колебания с циклической частотой

Как видно из этой формулы, циклическая частота не зависит от массы маятника и амплитуды его колебаний, а определяется только его длиной и ускорением свободного падения.
В общем случае, когда маятник находится в однородных полях нескольких сил, для определения периода колебаний следует ввести «эффективное ускорение»  характеризующее результирующее действие этих полей, и период колебаний маятника будет определяться по формуле
характеризующее результирующее действие этих полей, и период колебаний маятника будет определяться по формуле
Математический и пружинный маятники и энергия колебаний
Колебательные движения очень разнообразны. При этом существует «классика» колебательных движений — они описаны сотни лет назад, их изучением занимались Галилео Галилей (1564– 1642) и Христиан Гюйгенс (1629–1695). Это колебания пружинного и математического маятников.
Колебания пружинного маятника
Пружинный маятник — это колебательная система, представляющая собой закрепленное на пружине тело.
Рассмотрим колебания горизонтального пружинного маятника — тележки массой m, закрепленной на пружине жесткостью k. Будем считать, что силы трения, действующие в системе, пренебрежимо малы, а значит, колебания маятника незатухающие (их амплитуда с течением времени не изменяется, а полная механическая энергия системы сохраняется). При этом потенциальная энергия деформированной пружины будет превращаться в кинетическую энергию движения тележки, и наоборот.
Колебания пружинного маятника:
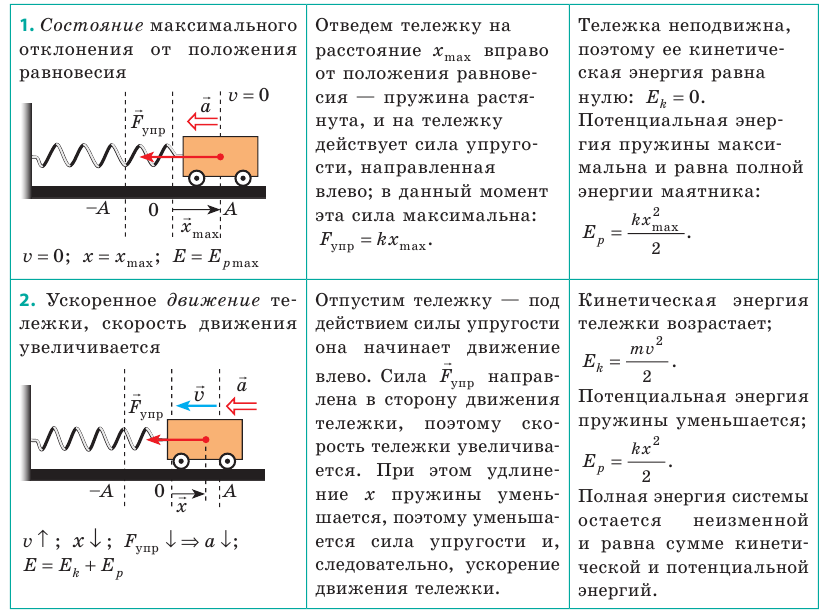
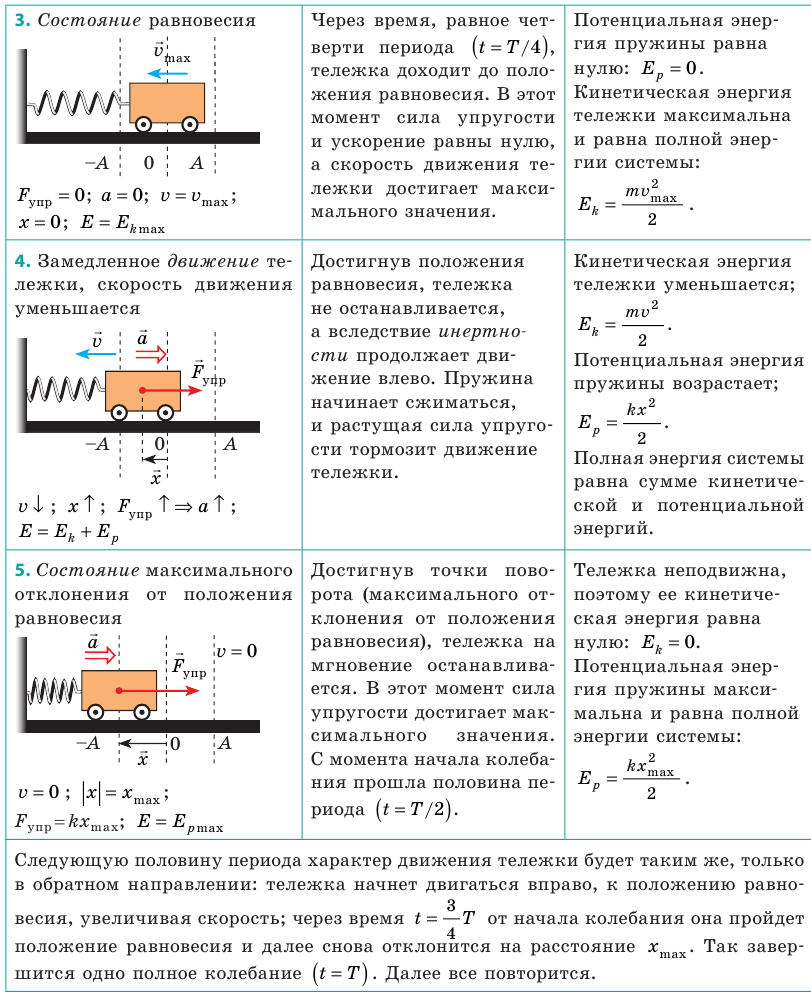
Обратите внимание! В течение всего времени колебания сила упругости направлена в сторону, противоположную смещению тележки, — сила упругости все время «толкает» тележку к положению равновесия.
Итак, причины свободных колебаний пружинного маятника: 1) действующая на тело сила всегда направлена к положению равновесия; 2) колеблющееся тело инертно, поэтому оно не останавливается в положении равновесия (когда равнодействующая сил становится равной нулю), а продолжает движение в том же направлении.
Как вычислить период колебаний пружинного маятника
Рассмотрим колебания тележки, закрепленной на горизонтальной пружине, с точки зрения второго закона Ньютона (рис. 20.1). Запишем уравнение второго закона Ньютона в векторном виде: 
Сила тяжести и сила нормальной реакции опоры уравновешивают друг друга, поэтому  . Спроецировав это уравнение на ось ОХ
. Спроецировав это уравнение на ось ОХ  и воспользовавшись законом Гука
и воспользовавшись законом Гука  получим:
получим:  .
.
Последнее уравнение можно записать в виде  Таким образом, колебания тележки на пружине являются гармоническими колебаниями, а циклическая частота этих колебаний равна:
Таким образом, колебания тележки на пружине являются гармоническими колебаниями, а циклическая частота этих колебаний равна: 
Приняв во внимание, что  , получим формулу для вычисления периода колебаний пружинного маятника:
, получим формулу для вычисления периода колебаний пружинного маятника:
Обратите внимание! Период колебаний пружинного маятника не зависит ни от амплитуды колебаний, ни от места расположения маятника (на поверхности Земли или Луны, в космическом корабле и т. д.), — он определяется только характеристиками самой колебательной системы «тело — пружина». Если период Т колебаний тела и жесткость k пружины известны, можно найти массу m тела. Такой способ определения массы используют в состоянии невесомости, когда обычные весы не работают.
Что называют математическим маятником
Любое твердое тело, которое совершает или может совершать колебания относительно оси, проходящей через точку подвеса, называют физическим маятником. Примером может быть игрушка, подвешенная на нити в салоне автомобиля. Если игрушку вывести из положения равновесия, она начнет колебаться. Однако изучать такие колебания сложно: их характер определяется размерами и формой игрушки, свойствами нити и другими факторами.
Чтобы размеры тела не влияли на характер его колебаний, следует взять нить, длина которой намного больше размеров тела, а масса незначительна по сравнению с его массой. В таком случае тело можно считать материальной точкой. А чтобы во время колебаний тело все время находилось на одинаковом расстоянии от точки подвеса, нить должна быть нерастяжимой. Таким образом будет получена физическая модель — математический маятник.
Математический маятник — это физическая модель колебательной системы, состоящая из материальной точки, подвешенной на невесомой и нерастяжимой нити, и гравитационного поля.
Колебания математического маятника
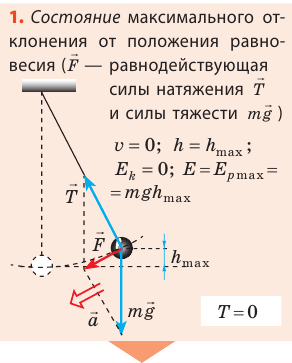
Возьмем небольшой, но достаточно тяжелый шарик и подвесим его на длинной нерастяжимой нити — такой маятник можно считать математическим. Если отклонить шарик от положения равновесия и отпустить, то в результате действия гравитационного поля Земли (силы тяжести) и силы натяжения нити шарик начнет колебаться около положения равновесия. Поскольку сопротивление воздуха пренебрежимо мало, а силы, действующие в системе, являются консервативными, полная механическая энергия шарика будет сохраняться: потенциальная энергия шарика будет превращаться в его кинетическую энергию, и наоборот.
Рассмотрите колебательное движение шарика (рис. 20.2). Объясните причины его движения. Какие происходят превращения энергии?
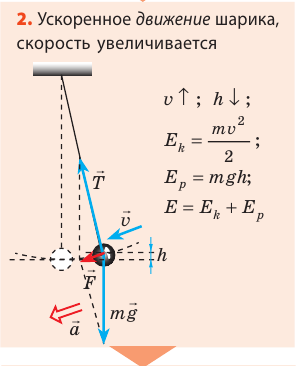
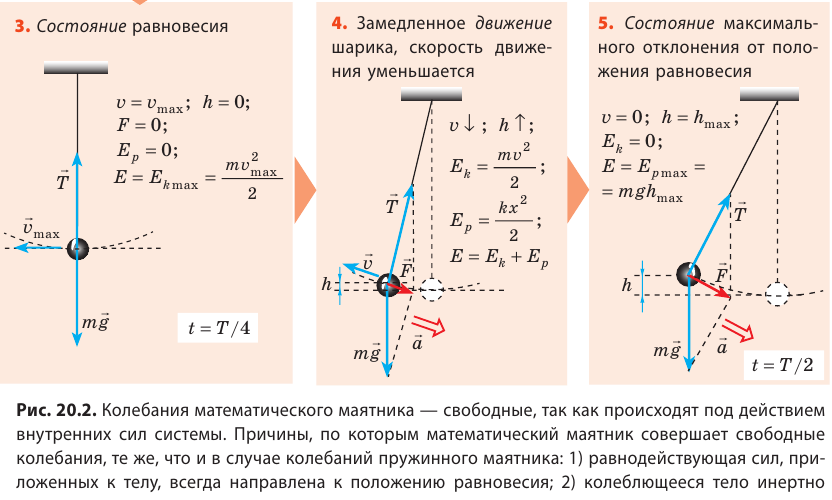
Как вычислить период колебаний математического маятника
Математический маятник, отклоненный от положения равновесия на небольшой угол (3–5°), будет совершать гармонические колебания, то есть ускорение его движения все время будет прямо пропорционально смещению и направлено в сторону, противоположную смещению: 
Для математического маятника:  . Поскольку
. Поскольку  , имеем формулу для периода колебаний математического маятника:
, имеем формулу для периода колебаний математического маятника:
где l — длина маятника; g — ускорение свободного падения.
Данную формулу впервые получил в XVII в. голландский ученый Христиан Гюйгенс, поэтому ее называют формулой Гюйгенса.
Период колебаний математического маятника не зависит от массы маятника, а определяется только длиной нити и ускорением свободного падения в том месте, где расположен маятник. Поэтому, измерив длину нити и период колебаний маятника, можно определить ускорение свободного падения в данной местности.
Пример:
Уравнение колебаний груза массой 1 кг на пружине имеет вид: (cм). Найдите полную механическую энергию колебаний; наибольшую скорость груза; кинетическую и потенциальную энергии системы через
(cм). Найдите полную механическую энергию колебаний; наибольшую скорость груза; кинетическую и потенциальную энергии системы через  с после начала отсчета времени. Трением пренебречь.
с после начала отсчета времени. Трением пренебречь.
Решение:
Трение отсутствует, поэтому полная механическая энергия сохраняется:

Сравним уравнение колебаний в общем виде с уравнением, приведенным в задаче:

Поскольку

Определив удлинение пружины через , вычислим потенциальную и кинетическую энергии пружины:
, вычислим потенциальную и кинетическую энергии пружины: 

Выводы:
- Скалярные и векторные величины и действия над ними
- Проекция вектора на ось
- Путь и перемещение
- Равномерное прямолинейное движение
- Вращательное движение тела
- Равномерное движение материальной точки по окружности
- Колебательное движение
- Физический и математический маятники