Угол между векторами. Ортогональные проекции векторов
Угол между векторами
Углом между двумя ненулевыми векторами называется угол между равными им векторами, имеющими общее начало, не превосходящий по величине числа .
Пусть в пространстве даны два ненулевых вектора и
(рис.1.22). Построим равные им векторы
и
. На плоскости, содержащей лучи
и
, получим два угла
. Меньший из них, величина
которого не превосходит
, принимается за угол между векторами
и
.
Поскольку направление нулевого вектора не определено, то не определен и угол между двумя векторами, если хотя бы один из них нулевой. Из определения следует, например, что угол между ненулевыми коллинеарными векторами либо равен нулю (если векторы одинаково направлены), либо равен (если векторы противоположно направлены).
Ортогональные проекции векторов
Движение по любой прямой может быть в двух направлениях. Ориентированной прямой называется прямая, на которой выбрано направление, т.е. одно из направлений считается положительным, а противоположное — отрицательным. Для измерения длин отрезков на прямой задается масштабный отрезок, который принимается за единицу.
Ориентированная прямая с заданным масштабным отрезком называется осью.
Любой ненулевой вектор , принадлежащий прямой, называется направляющим вектором для данной прямой, поскольку задает на ней ориентацию. Направление вектора
принимается за положительное, а направление противоположного вектора
— за отрицательное. Кроме того, длину вектора
— можно принять за величину масштабного отрезка на этой прямой. Поэтому можно сказать, что любой ненулевой вектор определяет ось — прямую, содержащую этот вектор, задавая на ней направление и масштабный отрезок.
Ортогональной проекцией вектора на ось, задаваемую вектором
, называется его проекция на ось вдоль прямой (или вдоль плоскости), перпендикулярной данной оси. Ортогональную проекцию вектора
на ось, задаваемую вектором
, будем обозначать
.
Ортогональную проекцию вектора на прямую
(см. разд. 1.2.2 и рис. 1.13) будем обозначать
.
Ортогональную проекцию вектора а на плоскость (см. разд. 1.2.2 и рис. 1.14) будем обозначать
.
Разность между вектором и его ортогональной проекцией называют ортогональной составляющей:
— — ортогональная составляющая вектора
относительно вектора
;
— — ортогональная составляющая вектора
относительно прямой
;
— — ортогональная составляющая вектора
относительно плоскости
.
На рис. 1.23 изображены ортогональные проекции вектора :
— на прямую (или на ось
, задаваемую вектором
) вдоль прямой
(рис.1.23,а);
— на прямую (или на ось
, задаваемую вектором
) вдоль плоскости
(рис.1.23,б);
— на плоскость вдоль прямой
(рис.1.23,в).
На рис. 1.23 изображены ортогональные составляющие вектора :
— относительно оси (вектора
):
(рис.1.23,а);
— относительно плоскости (рис.1.23,в).
Для ортогональных проекций справедлива следующая теорема (см. теорему 1.1 в разд. 1.5).
Теорема 1.2 (об ортогональных проекциях вектора).
1. Если на плоскости заданы две взаимно перпендикулярные прямые и
, то любой вектор
на плоскости можно однозначно представить в виде суммы своих ортогональных проекций на эти прямые, т.е.
(рис. 1.24,а).
2. Если в пространстве заданы три попарно перпендикулярные прямые и
, пересекающиеся в одной точке, то любой вектор
в пространстве можно однозначно представить в виде суммы своих ортогональных проекций на эти прямые, т.е.
(рис. 1.24,6).
3. Квадрат длины вектора на плоскости или в пространстве равен сумме квадратов длин своих ортогональных проекций, т.е.
Первые два утверждения представляют собой частные случаи теоремы 1.1. Третье утверждение следует из теоремы Пифагора (для треугольника (рис. 1.24,а) или треугольников
и
(рис. 1.24,6)).
В формулировке теоремы 1.2 прямые можно заменить осями, задаваемыми попарно ортогональными векторами.
На рис.1.24,а проекции вектора на оси одновременно являются ортогональными составляющими:
и
. На рис. 1.24,6 вектор
является проекцией вектора
на плоскость
, содержащую прямые
и
:
, а вектор
является ортогональной составляющей вектора
относительно плоскости
.
Алгебраическое значение длины проекции
Пусть – угол между ненулевым вектором
и осью, задаваемой вектором
, т.е. угол между ненулевыми векторами
и
.
Алгебраическим значением длины ортогональной проекции вектора на ось, задаваемую вектором
, называется длина его ортогональной проекции
, взятая с положительным знаком, если угол
не превышает
, и с отрицательным знаком, если угол
больше
, т.е.:
Например, для проекций, изображенных на рис. 1.25, , поскольку угол
между векторами
и
острый, a
, так как угол
между векторами
и
тупой.
Некоторые свойства проекций векторов переносятся на алгебраические значения их длин, в частности:
1. — алгебраическое значение длины ортогональной проекции суммы векторов равно сумме алгебраических значений длин ортогональных проекций слагаемых;
2. — алгебраическое значение длины ортогональной проекции произведения вектора на число равно произведению этого числа на алгебраическое значение длины ортогональной проекции вектора
Замечания 1.4.
1. Из определения алгебраического значения длины ортогональной проекции следует (см. также рис.1.25), что , т.е. алгебраическое значение длины ортогональной проекции ненулевого вектора на ось равна произведению длины этого вектора на косинус угла между вектором и осью.
Ортогональную проекцию вектора на ось, задаваемую вектором
, можно представить в виде
Если — единичный вектор, то
.
2. Равенство можно использовать как определение косинуса угла между ненулевыми векторами
и
(или, что то же самое, косинуса угла между осями, заданными ненулевыми векторами
и
(рис. 1.26)).
3. Углом между ненулевым вектором и прямой
называется угол
между вектором
и его ортогональной проекцией
на прямую
. Величина угла
может быть найдена по формуле
4. Углом между ненулевым вектором и плоскостью
называется угол
между вектором
и его ортогональной проекцией
на плоскость
. Величина угла
может быть найдена по формуле
Пример 1.7. Основания и
равнобокой трапеции
равны
и
соответственно; точка
— середина стороны
(рис. 1.27). Найти алгебраические значения длин ортогональных проекций векторов
и
на ось, задаваемую вектором
.
Решение. Пусть — высота трапеции,
— точка пересечения прямых
и
. По свойству равнобокой трапеции
; из равенства треугольников
и
.
Обозначим через искомые алгебраические значения длин ортогональных проекций.Тогда из равенств
,
и свойства 1 алгебраических значений длин проекций следует:
Решая систему находим
, т.е.
.
Математический форум (помощь с решением задач, обсуждение вопросов по математике).
Если заметили ошибку, опечатку или есть предложения, напишите в комментариях.
ТЕОРЕМА
16.1. Пусть
в пространстве выбран ортонормированный
базис ![]() , в
, в
котором ![]() . Тогда
. Тогда
![]()
Доказательство. По
определению координат вектора в базисе
имеем
![]() и
и ![]() ,
,
поэтому
![]()
Используя
доказанные свойства скалярного
произведения, получаем
![]()
![]()
Поскольку
базис ![]() ортонормированный,
ортонормированный,
то ![]() и
и ![]() ,
,
значит, окончательно получим
![]()
![]()
Теорема
доказана.
Замечание
16.1. Если
рассматривается множество векторов,
параллельных некоторой плоскости (т.е.
двумерное векторное подпространство
пространства ![]() ),
),
то формула ![]() принимает
принимает
вид
![]()
где ![]() в
в
ортонормированном базисе двумерного
подпространства ![]() .
.
17 Задачи, решаемые с помощью скалярного произведения
Задача
17.1. Пусть
даны координаты вектора ![]() в
в
ортонормированном базисе. Найти длину
вектора ![]() .
.
Решение. Согласно
свойству 4. скалярного произведения
длина вектора находится по формуле ![]() ,
,
т.е. ![]() .
.
Но скалярное произведение векторов в
ортонормированном базисе
вычисляется
по формуле ![]() .
.
Поэтому получаем следующую формулу для
нахождения длины вектора, заданного
своими координатами в ортонормированном
базисе
![]()
Задача
17.2. Пусть
даны координаты векторов ![]() и
и ![]() в
в
ортонормированном базисе.
Найти угол между векторами ![]() и
и ![]() .
.
Решение. Из
определения скалярного произведения
получаем следующую формулу для нахождения
косинуса угла между векторами:
![]()
С
учетом формул ![]() и
и ![]() приходим
приходим
к следующей формуле для нахождения угла
между векторами, заданных своими
координатами в ортонормированном базисе

Ортогональная проекция вектора на ось.
Задача
17.3. Пусть
даны два вектора ![]() и
и ![]() . Найти
. Найти
ортогональную проекцию вектора ![]() на
на
ось вектора ![]() .
.
Решение. По
формуле ![]() имеем
имеем
Следовательно,
получаем формулу для нахождения
ортогональной проекции вектора ![]() на
на
ось вектора ![]()
![]()
Ортогональная проекция вектора на плоскость.
Определение
17.1. Пусть
дан вектор ![]() и
и
некоторая плоскость ![]() .
.
Обозначим через ![]() ортогональные
ортогональные
проекции точек ![]() на
на
плоскость ![]() .
.
Вектор ![]() называется
называется
ортогональной проекцией вектора ![]() на
на
плоскость ![]() и
и
обозначается ![]() .
.
Задача
17.3. Найти
ортогональную проекцию данного
вектора ![]() на
на
плоскость ![]() ,
,
перпендикулярную данному
вектору ![]() .
.
Решение. Пусть
данный вектор ![]() .
.
По определению ортогональной проекции
вектора на плоскость имеем ![]() (см
(см
рисунок).
По правилу
многоугольника для сложения векторов,
получаем равенство
![]()
Заметим,
что ![]() и
и ![]() ,
,
поэтому ![]() .
.
По признаку коллинеарности векторов
получаем равенство ![]() .
.
Кроме того, ![]() ,
,
поэтому
![]()
Умножим
обе части этого равенства скалярно на
вектор ![]() .
.
Имеем числовое равенство
![]()
Учитывая,
что ![]()
![]()
Из
последнего равенства находим,
что
![]()
Поэтому
для нахождения ортогональной проекции
вектора на плоскость, перпендикулярную
заданному вектору имеем
![]()
18 Геометрический смысл координат вектора в ортонормированном базисе
Пусть
в пространстве выбран ортонормированный
базис ![]() ,
,
в котором ![]() .
.
Тогда ![]() .
.
Умножим обе части этого
равенства
скалярно сначала на вектор ![]() ,
,
потом на ![]() и
и ![]() .
.
Получаем
![]()
Поскольку
базис ортонормированный, то ![]() ,
,
а поэтому имеем равенства
![]()
С
учетом формулы ![]() имеем
имеем
![]()
Из
равенств ![]() получаем
получаем
геометрический смысл координат вектора
в ортонормированном базисе:
координаты
вектора в ортонормированном базисе
равны ортогональным проекциям данного
вектора на оси
соответствующих базисных векторов.
Обозначим
через ![]() .
.
Тогда, используя формулу ![]() ,
,
равенства ![]() примут
примут
вид
![]()
Числа ![]() называются
называются
направляющими косинусами вектора ![]() в
в
ОНБ ![]() .
.
Подставим ![]() в
в ![]() получаем
получаем
![]()
или
![]()
Таким
образом, сумма квадратов направляющих
косинусов любого ненулевого вектора
равна единице.
Заметим,
что если ![]() —
—
единичный, то его координаты в ОНБ равны
направляющим косинусам этого вектора
или, иначе, направляющие косинусы данного
вектора ![]() равны
равны
координатам единичного вектора ![]() того
того
же направления.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
30.03.201527.55 Mб32Административное право России Конин Н.М..pdf
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
In linear algebra and functional analysis, a projection is a linear transformation  from a vector space to itself such that
from a vector space to itself such that  . That is, whenever is applied twice to any value, it gives the same result as if it were applied once (idempotent). It leaves its image unchanged. Though abstract, this definition of «projection» formalizes and generalizes the idea of graphical projection. One can also consider the effect of a projection on a geometrical object by examining the effect of the projection on points in the object.
. That is, whenever is applied twice to any value, it gives the same result as if it were applied once (idempotent). It leaves its image unchanged. Though abstract, this definition of «projection» formalizes and generalizes the idea of graphical projection. One can also consider the effect of a projection on a geometrical object by examining the effect of the projection on points in the object.
Definitions
A projection on a vector space  is a linear operator
is a linear operator  such that .
such that .
When has an inner product and is complete (i.e. when is a Hilbert space) the concept of orthogonality can be used. A projection on a Hilbert space is called an orthogonal projection if it satisfies  for all
for all  .
.
A projection on a Hilbert space that is not orthogonal is called an oblique projection.
Projection matrix
The eigenvalues of a projection matrix must be 0 or 1.
Examples
Orthogonal projection
The transformation P is the orthogonal projection onto the line m.
For example, the function which maps the point  in three-dimensional space
in three-dimensional space  to the point
to the point  is an orthogonal projection onto the x–y plane. This function is represented by the matrix
is an orthogonal projection onto the x–y plane. This function is represented by the matrix

The action of this matrix on an arbitrary vector is

To see that is indeed a projection, i.e.,  , we compute
, we compute
 .
.

Observing that  shows that the projection is an orthogonal projection.
shows that the projection is an orthogonal projection.
Oblique projection
The transformation T is the oblique projection along k onto m. The range of T is m and the null space is k.
A simple example of a non-orthogonal (oblique) projection (for definition see below) is

Via matrix multiplication, one sees that

proving that is indeed a projection.
The projection is orthogonal if and only if  because only then .
because only then .
Properties and classification
Idempotence
By definition, a projection is idempotent (i.e. ).
Complementarity of range and kernel
Let  be a finite dimensional vector space and be a projection on . Suppose the subspaces
be a finite dimensional vector space and be a projection on . Suppose the subspaces  and are the range and kernel of respectively.
and are the range and kernel of respectively.
Then has the following properties:
- is the identity operator on
- .
- We have a direct sum . Every vector may be decomposed uniquely as with and , and where .








The range and kernel of a projection are complementary, as are and  . The operator
. The operator  is also a projection as the range and kernel of become the kernel and range of and vice versa. We say is a projection along onto (kernel/range) and is a projection along onto .
is also a projection as the range and kernel of become the kernel and range of and vice versa. We say is a projection along onto (kernel/range) and is a projection along onto .
Spectrum
In infinite dimensional vector spaces, the spectrum of a projection is contained in  as
as

Only 0 or 1 can be an eigenvalue of a projection. This implies that an orthogonal projection is always a positive semi-definite matrix. In general, the corresponding eigenspaces are (respectively) the kernel and range of the projection. Decomposition of a vector space into direct sums is not unique. Therefore, given a subspace , there may be many projections whose range (or kernel) is .
If a projection is nontrivial it has minimal polynomial  , which factors into distinct roots, and thus is diagonalizable.
, which factors into distinct roots, and thus is diagonalizable.
Product of projections
The product of projections is not in general a projection, even if they are orthogonal. If two projections commute then their product is a projection, but the converse is false: the product of two non-commuting projections may be a projection .
If two orthogonal projections commute then their product is an orthogonal projection. If the product of two orthogonal projections is an orthogonal projection, then the two orthogonal projections commute (more generally: two self-adjoint endomorphisms commute if and only if their product is self-adjoint).
Orthogonal projections
When the vector space has an inner product and is complete (is a Hilbert space) the concept of orthogonality can be used. An orthogonal projection is a projection for which the range and the null space are orthogonal subspaces. Thus, for every  and
and  in ,
in ,  . Equivalently:
. Equivalently:
- .

A projection is orthogonal if and only if it is self-adjoint. Using the self-adjoint and idempotent properties of , for any and in we have  ,
,  , and
, and

where  is the inner product associated with . Therefore,
is the inner product associated with . Therefore,  and
and  are orthogonal projections.
are orthogonal projections.
The other direction, namely that if is orthogonal then it is self-adjoint, follows from

for every and in ; thus  .
.
-
Proof of existence Let
be a complete metric space with an inner product, and let be a closed linear subspace of (and hence complete as well).
For every
the following set of non-negative norms has an infimum, and due to the completeness of it is a minimum. We define as the point in where this minimum is obtained.
Obviously
is in . It remains to show that satisfies and that it is linear.
Let us define
. For every non-zero in , the following holds:
By defining
we see that unless vanishes. Since was chosen as the minimum of the abovementioned set, it follows that indeed vanishes. In particular, (for ): .
Linearity follows from the vanishing of
for every :
By taking the difference between the equations we have
But since we may choose
(as it is itself in ) it follows that . Similarly we have for every scalar .


















Properties and special cases
An orthogonal projection is a bounded operator. This is because for every  in the vector space we have, by Cauchy–Schwarz inequality:
in the vector space we have, by Cauchy–Schwarz inequality:

Thus  .
.
For finite dimensional complex or real vector spaces, the standard inner product can be substituted for .
Formulas
A simple case occurs when the orthogonal projection is onto a line. If  is a unit vector on the line, then the projection is given by the outer product
is a unit vector on the line, then the projection is given by the outer product

(If is complex-valued, the transpose in the above equation is replaced by a Hermitian transpose). This operator leaves u invariant, and it annihilates all vectors orthogonal to , proving that it is indeed the orthogonal projection onto the line containing u. A simple way to see this is to consider an arbitrary vector as the sum of a component on the line (i.e. the projected vector we seek) and another perpendicular to it,  . Applying projection, we get
. Applying projection, we get

by the properties of the dot product of parallel and perpendicular vectors.
This formula can be generalized to orthogonal projections on a subspace of arbitrary dimension. Let  be an orthonormal basis of the subspace , and let
be an orthonormal basis of the subspace , and let  denote the
denote the  matrix whose columns are , i.e
matrix whose columns are , i.e  . Then the projection is given by:
. Then the projection is given by:

which can be rewritten as

The matrix  is the partial isometry that vanishes on the orthogonal complement of and is the isometry that embeds into the underlying vector space. The range of
is the partial isometry that vanishes on the orthogonal complement of and is the isometry that embeds into the underlying vector space. The range of  is therefore the final space of . It is also clear that
is therefore the final space of . It is also clear that  is the identity operator on .
is the identity operator on .
The orthonormality condition can also be dropped. If is a (not necessarily orthonormal) basis, and is the matrix with these vectors as columns, then the projection is:

The matrix still embeds into the underlying vector space but is no longer an isometry in general. The matrix  is a «normalizing factor» that recovers the norm. For example, the rank-1 operator
is a «normalizing factor» that recovers the norm. For example, the rank-1 operator  is not a projection if
is not a projection if  After dividing by
After dividing by  we obtain the projection
we obtain the projection  onto the subspace spanned by .
onto the subspace spanned by .
In the general case, we can have an arbitrary positive definite matrix  defining an inner product
defining an inner product  , and the projection is given by
, and the projection is given by  . Then
. Then

When the range space of the projection is generated by a frame (i.e. the number of generators is greater than its dimension), the formula for the projection takes the form:
 . Here
. Here  stands for the Moore–Penrose pseudoinverse. This is just one of many ways to construct the projection operator.
stands for the Moore–Penrose pseudoinverse. This is just one of many ways to construct the projection operator.
If  is a non-singular matrix and
is a non-singular matrix and  (i.e.,
(i.e.,  is the null space matrix of ), the following holds:
is the null space matrix of ), the following holds:
![{displaystyle {begin{aligned}I&={begin{bmatrix}A&Bend{bmatrix}}{begin{bmatrix}A&Bend{bmatrix}}^{-1}{begin{bmatrix}A^{mathrm {T} }\B^{mathrm {T} }end{bmatrix}}^{-1}{begin{bmatrix}A^{mathrm {T} }\B^{mathrm {T} }end{bmatrix}}\&={begin{bmatrix}A&Bend{bmatrix}}left({begin{bmatrix}A^{mathrm {T} }\B^{mathrm {T} }end{bmatrix}}{begin{bmatrix}A&Bend{bmatrix}}right)^{-1}{begin{bmatrix}A^{mathrm {T} }\B^{mathrm {T} }end{bmatrix}}\&={begin{bmatrix}A&Bend{bmatrix}}{begin{bmatrix}A^{mathrm {T} }A&O\O&B^{mathrm {T} }Bend{bmatrix}}^{-1}{begin{bmatrix}A^{mathrm {T} }\B^{mathrm {T} }end{bmatrix}}\[4pt]&=A(A^{mathrm {T} }A)^{-1}A^{mathrm {T} }+B(B^{mathrm {T} }B)^{-1}B^{mathrm {T} }end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5726c62db8705af0b0cfcba21d9e4c4a3b9c0e03)
If the orthogonal condition is enhanced to  with non-singular, the following holds:
with non-singular, the following holds:

All these formulas also hold for complex inner product spaces, provided that the conjugate transpose is used instead of the transpose. Further details on sums of projectors can be found in Banerjee and Roy (2014). Also see Banerjee (2004) for application of sums of projectors in basic spherical trigonometry.
Oblique projections
The term oblique projections is sometimes used to refer to non-orthogonal projections. These projections are also used to represent spatial figures in two-dimensional drawings (see oblique projection), though not as frequently as orthogonal projections. Whereas calculating the fitted value of an ordinary least squares regression requires an orthogonal projection, calculating the fitted value of an instrumental variables regression requires an oblique projection.
Projections are defined by their null space and the basis vectors used to characterize their range (which is the complement of the null space). When these basis vectors are orthogonal to the null space, then the projection is an orthogonal projection. When these basis vectors are not orthogonal to the null space, the projection is an oblique projection. Let the vectors form a basis for the range of the projection, and assemble these vectors in the matrix . The range and the null space are complementary spaces, so the null space has dimension  . It follows that the orthogonal complement of the null space has dimension
. It follows that the orthogonal complement of the null space has dimension  . Let
. Let  form a basis for the orthogonal complement of the null space of the projection, and assemble these vectors in the matrix . Then the projection is defined by
form a basis for the orthogonal complement of the null space of the projection, and assemble these vectors in the matrix . Then the projection is defined by

This expression generalizes the formula for orthogonal projections given above.
Finding projection with an inner product
Let be a vector space (in this case a plane) spanned by orthogonal vectors  . Let be a vector. One can define a projection of onto as
. Let be a vector. One can define a projection of onto as

where the  ‘s imply Einstein sum notation. The vector can be written as an orthogonal sum such that
‘s imply Einstein sum notation. The vector can be written as an orthogonal sum such that  .
.  is sometimes denoted as
is sometimes denoted as  . There is a theorem in Linear Algebra that states that this
. There is a theorem in Linear Algebra that states that this  is the shortest distance from to and is commonly used in areas such as machine learning.
is the shortest distance from to and is commonly used in areas such as machine learning.
y is being projected onto the vector space V.
Canonical forms
Any projection on a vector space of dimension  over a field is a diagonalizable matrix, since its minimal polynomial divides
over a field is a diagonalizable matrix, since its minimal polynomial divides  , which splits into distinct linear factors. Thus there exists a basis in which has the form
, which splits into distinct linear factors. Thus there exists a basis in which has the form

where  is the rank of . Here
is the rank of . Here  is the identity matrix of size , and
is the identity matrix of size , and  is the zero matrix of size
is the zero matrix of size  . If the vector space is complex and equipped with an inner product, then there is an orthonormal basis in which the matrix of P is
. If the vector space is complex and equipped with an inner product, then there is an orthonormal basis in which the matrix of P is
- .

where  . The integers
. The integers  and the real numbers
and the real numbers  are uniquely determined. Note that
are uniquely determined. Note that  . The factor
. The factor  corresponds to the maximal invariant subspace on which acts as an orthogonal projection (so that P itself is orthogonal if and only if
corresponds to the maximal invariant subspace on which acts as an orthogonal projection (so that P itself is orthogonal if and only if  ) and the -blocks correspond to the oblique components.
) and the -blocks correspond to the oblique components.
Projections on normed vector spaces
When the underlying vector space  is a (not necessarily finite-dimensional) normed vector space, analytic questions, irrelevant in the finite-dimensional case, need to be considered. Assume now is a Banach space.
is a (not necessarily finite-dimensional) normed vector space, analytic questions, irrelevant in the finite-dimensional case, need to be considered. Assume now is a Banach space.
Many of the algebraic results discussed above survive the passage to this context. A given direct sum decomposition of into complementary subspaces still specifies a projection, and vice versa. If is the direct sum  , then the operator defined by
, then the operator defined by  is still a projection with range and kernel . It is also clear that . Conversely, if is projection on , i.e. , then it is easily verified that
is still a projection with range and kernel . It is also clear that . Conversely, if is projection on , i.e. , then it is easily verified that  . In other words,
. In other words,  is also a projection. The relation implies
is also a projection. The relation implies  and is the direct sum
and is the direct sum  .
.
However, in contrast to the finite-dimensional case, projections need not be continuous in general. If a subspace of is not closed in the norm topology, then projection onto is not continuous. In other words, the range of a continuous projection must be a closed subspace. Furthermore, the kernel of a continuous projection (in fact, a continuous linear operator in general) is closed. Thus a continuous projection gives a decomposition of into two complementary closed subspaces:  .
.
The converse holds also, with an additional assumption. Suppose is a closed subspace of . If there exists a closed subspace such that X = U ⊕ V, then the projection with range and kernel is continuous. This follows from the closed graph theorem. Suppose xn → x and Pxn → y. One needs to show that  . Since is closed and {Pxn} ⊂ U, y lies in , i.e. Py = y. Also, xn − Pxn = (I − P)xn → x − y. Because is closed and {(I − P)xn} ⊂ V, we have
. Since is closed and {Pxn} ⊂ U, y lies in , i.e. Py = y. Also, xn − Pxn = (I − P)xn → x − y. Because is closed and {(I − P)xn} ⊂ V, we have  , i.e.
, i.e.  , which proves the claim.
, which proves the claim.
The above argument makes use of the assumption that both and are closed. In general, given a closed subspace , there need not exist a complementary closed subspace , although for Hilbert spaces this can always be done by taking the orthogonal complement. For Banach spaces, a one-dimensional subspace always has a closed complementary subspace. This is an immediate consequence of Hahn–Banach theorem. Let be the linear span of . By Hahn–Banach, there exists a bounded linear functional  such that φ(u) = 1. The operator
such that φ(u) = 1. The operator  satisfies , i.e. it is a projection. Boundedness of implies continuity of and therefore
satisfies , i.e. it is a projection. Boundedness of implies continuity of and therefore  is a closed complementary subspace of .
is a closed complementary subspace of .
Applications and further considerations
Projections (orthogonal and otherwise) play a major role in algorithms for certain linear algebra problems:
- QR decomposition (see Householder transformation and Gram–Schmidt decomposition);
- Singular value decomposition
- Reduction to Hessenberg form (the first step in many eigenvalue algorithms)
- Linear regression
- Projective elements of matrix algebras are used in the construction of certain K-groups in Operator K-theory
As stated above, projections are a special case of idempotents. Analytically, orthogonal projections are non-commutative generalizations of characteristic functions. Idempotents are used in classifying, for instance, semisimple algebras, while measure theory begins with considering characteristic functions of measurable sets. Therefore, as one can imagine, projections are very often encountered in the context operator algebras. In particular, a von Neumann algebra is generated by its complete lattice of projections.
Generalizations
More generally, given a map between normed vector spaces  one can analogously ask for this map to be an isometry on the orthogonal complement of the kernel: that
one can analogously ask for this map to be an isometry on the orthogonal complement of the kernel: that  be an isometry (compare Partial isometry); in particular it must be onto. The case of an orthogonal projection is when W is a subspace of V. In Riemannian geometry, this is used in the definition of a Riemannian submersion.
be an isometry (compare Partial isometry); in particular it must be onto. The case of an orthogonal projection is when W is a subspace of V. In Riemannian geometry, this is used in the definition of a Riemannian submersion.
References

|
This page uses content that though originally imported from the Wikipedia article Projection (linear algebra) might have been very heavily modified, perhaps even to the point of disagreeing completely with the original wikipedia article. The list of authors can be seen in the page history. The text of Wikipedia is available under the Creative Commons Licence. |
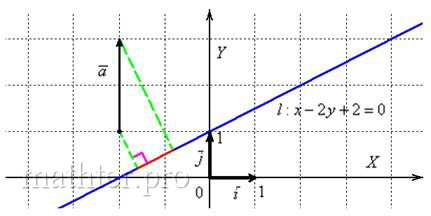
2.5.8. Как найти проекцию вектора на прямую?
Об ортогональной проекции вектора на вектор мы говорили ранее, и фактически было установлено
следующее:
Чтобы найти ортогональную проекцию вектора на прямую, нужно найти его проекцию на любой направляющий вектор этой прямой.
…возможно, не всем понятен термин «ортогональная» – это такая проекция, при которой на вектор «падают лучи света» строго
перпендикулярно по отношению к прямой (см. рис. ниже). Существует куча иных («косых») проекций, когда проецирование осуществляется под
другими углами, но для данной книги этот материал не столь актуален.
Решим символическую задачку:
Задача 85
Найти проекцию вектора ![]() на прямую
на прямую ![]()
Решение: найдём какой-нибудь направляющий вектор прямой, проще и быстрее
взять стандартный вариант: ![]() .
.
Проекция вектора на прямую – есть его проекция на любой направляющий вектор этой прямой, по
соответствующей формуле:

Ответ: ![]()
Напоминаю, что проекция – это длина «тени» вектора ![]() (красный цвет):
(красный цвет):
Желающие могут взять любые точки ![]() прямой, найти направляющий вектор
прямой, найти направляющий вектор ![]() и убедиться в том, что проекция
и убедиться в том, что проекция ![]() будет такой же, как вариант, со знАком «минус».
будет такой же, как вариант, со знАком «минус».
Ну вот и подошло к концу наше путешествие по основным задачам с «плоской» прямой, и никакого Кащея Бессмертного тут нет…. – Здесь есть я, с
новыми знаниями и задачами J Потому что Бабу-Ягу никто не отменял =)
 2.6. Линейные неравенства
2.6. Линейные неравенства
 2.5.7. Как найти угол между прямыми?
2.5.7. Как найти угол между прямыми?
| Оглавление |
Автор: Aлeксaндр Eмeлин
Преобразование P — это ортогональная проекция на линию m.
В линейной алгебре и функциональный анализ, проекция — это линейное преобразование P { displaystyle P}из векторного пространства самому себе так, что P 2 = P { displaystyle P ^ {2} = P}. То есть всякий раз, когда P { displaystyle P}применяется дважды к любому значению, он дает такой же результат, как если бы он был применен один раз (идемпотент ). Он оставляет свой образ неизменным. Хотя абстрактная, это определение «проекции» формализует и обобщает идею графической проекции. Можно также рассмотреть влияние проекции на геометрический объект , исследуя влияние проекции на точки в объекте.
Содержание
- 1 Определения
- 1.1 Матрица проекции
- 2 Примеры
- 2.1 Ортогональная проекция
- 2.2 Наклонная проекция
- 3 Свойства и классификация
- 3.1 Идемпотентность
- 3.2 Комплементарность диапазон и ядро
- 3.3 Спектр
- 3.4 Произведение проекций
- 3.5 Ортогональные проекции
- 3.5.1 Свойства и особые случаи
- 3.5.1.1 Формулы
- 3.5.1 Свойства и особые случаи
- 3.6 Косые проекции
- 3.7 Поиск проекции с внутренним продуктом
- 4 Канонические формы
- 5 Проекции на нормированных векторных пространствах
- 6 Приложения и дополнительные соображения
- 7 Обобщения
- 8 См. также
- 9 Примечания
- 10 Ссылки
- 11 Внешние ссылки
Определения
A проекция на векторное пространство V { displaystyle V}— линейный оператор P: V ↦ V { displaystyle P : V mapsto V}такой, что P 2 = P { displaystyle P ^ {2} = P}.
Когда V { displaystyle V}имеет внутренний продукт и является полным (т.е. когда V { displaystyle V}— это гильбертово пространство ) может использоваться концепция ортогональности. Проекция P { displaystyle P}в гильбертовом пространстве V { displaystyle V}называется ортогональной проекцией, если она удовлетворяет ⟨п Икс, Y⟩ знак равно ⟨Икс, П Y⟩ { Displaystyle langle Px, y rangle = langle x, Py rangle}для всех x, y ∈ V { displaystyle x, y in V}. Неортогональная проекция на гильбертово пространство называется наклонной проекцией .
Матрица проекции
Собственные значения матрицы проекции должно быть 0 или 1.
Примеры
Ортогональная проекция
Например, функция, отображающая точку (x, y, z) { displaystyle (x, y, z)}в трехмерном пространстве R 3 { displaystyle mathbb {R} ^ {3}}до точки (x, y, 0) { displaystyle (x, y, 0)}— ортогональная проекция на плоскость x – y. Эта функция представлена матрицей
- P = [1 0 0 0 1 0 0 0 0]. { displaystyle P = { begin {bmatrix} 1 0 0 \ 0 1 0 \ 0 0 0 end {bmatrix}}.}
Действие этой матрицы на произвольный вектор:
- P (xyz) = (xy 0). { displaystyle P { begin {pmatrix} x \ y \ z end {pmatrix}} = { begin {pmatrix} x \ y \ 0 end {pmatrix}}.}
Чтобы увидеть что P { displaystyle P}действительно является проекцией, т.е. P = P 2 { displaystyle P = P ^ {2}}, мы вычисляем
- P 2 (xyz) = P (xy 0) = (xy 0) = P (xyz) { displaystyle P ^ {2} { begin {pmatrix} x \ y \ z end {pmatrix} } = P { begin {pmatrix} x \ y \ 0 end {pmatrix}} = { begin {pmatrix} x \ y \ 0 end {pmatrix}} = P { begin {pmatrix} x \ y \ z end {pmatrix}}}.
Заметим, что PT = P { displaystyle P ^ { mathrm {T}} = P}показывает, что проекция является ортогональной проекцией.
Наклонная проекция
Простым примером неортогональной (наклонной) проекции (определение см. Ниже) является
- P = [0 0 α 1]. { displaystyle P = { begin {bmatrix} 0 0 \ alpha 1 end {bmatrix}}.}
Через умножение матриц можно увидеть, что
- P 2 = [0 0 α 1] [0 0 α 1] = [0 0 α 1] = P. { displaystyle P ^ {2} = { begin {bmatrix} 0 0 \ alpha 1 end {bmatrix}} { begin {bmatrix} 0 0 \ alpha 1 end {bmatrix}} = { begin { bmatrix} 0 0 \ alpha 1 end {bmatrix}} = P.}
доказывает, что P { displaystyle P}действительно является проекцией.
Проекция P { displaystyle P}ортогональна тогда и только тогда, когда α = 0 { displaystyle alpha = 0}, потому что только тогда PT = P { displaystyle P ^ { mathrm {T}} = P}.
Свойства и классификация
Преобразование T — это проекция вдоль k на m. Диапазон T равен m, а пустое пространство — k.
Идемпотентность
По определению проекция P { displaystyle P}является идемпотентной (например, P 2 = P { displaystyle P ^ {2} = P}).
Комплементарность диапазона и ядра
Пусть W { displaystyle W}будет конечномерным векторным пространством и P { displaystyle P}быть проекцией на W { displaystyle W}. Предположим, что подпространства U { displaystyle U}и V { displaystyle V}— это диапазон и ядро из P { displaystyle P}соответственно. Тогда P { displaystyle P}имеет следующие свойства:
- P { displaystyle P}— оператор идентичности I { displaystyle I}на U { displaystyle U}
- ∀ x ∈ U: P x = x { displaystyle forall x in U: Px = x}.
- ∀ x ∈ U: P x = x { displaystyle forall x in U: Px = x}
- У нас есть прямая сумма W = U ⊕ V { displaystyle W = U oplus V}. Каждый вектор x ∈ W { displaystyle x in W}может быть разложен однозначно как x = u + v { displaystyle x = u + v}с u = P x { displaystyle u = Px}и v = x — P x = (I — P) x { displaystyle v = x-Px = (IP) x}, и где u ∈ U, v ∈ V { displaystyle u in U, v in V}.
Диапазон и ядро проекции дополняют друг друга, как и P { displaystyle P}и Q = I — P { displaystyle Q = IP}. Оператор Q { displaystyle Q}также является проекцией, поскольку диапазон и ядро P { displaystyle P}становятся ядром, а диапазон Q { displaystyle Q}и наоборот. Мы говорим, что P { displaystyle P}— это проекция вдоль V { displaystyle V}на U { displaystyle U}(ядро / диапазон) и Q { displaystyle Q}— это проекция вдоль U { displaystyle U}на V { displaystyle V}.
Спектр
В бесконечномерных векторных пространствах спектр проекции содержится в {0, 1} { displaystyle {0,1 } }как
- (λ I — P) — 1 = 1 λ I + 1 λ (λ — 1) P. { displaystyle ( lambda IP) ^ {- 1} = { frac {1} { lambda}} I + { frac {1} { lambda ( lambda -1)}} P.}
Только 0 или 1 могут быть собственным значением проекции. Это означает, что ортогональная проекция P { displaystyle P}всегда является положительной полуопределенной матрицей. В общем, соответствующие собственные подпространства являются (соответственно) ядром и диапазоном проекции. Разложение векторного пространства на прямые суммы не единственно. Следовательно, учитывая подпространство V { displaystyle V}, может быть много проекций, диапазон (или ядро) которых составляет V { displaystyle V}.
Если проекция нетривиальна он имеет минимальный многочлен x 2 — x = x (x — 1) { displaystyle x ^ {2} -x = x (x-1)}, который делится на отдельные корни, и, таким образом, P { displaystyle P}диагонализуемый.
Произведение проекций
Произведение проекций, как правило, не является проекцией, даже если они ортогональны. Если две проекции коммутируют, то их произведение является проекцией, но обратное неверно: произведение двух некоммутирующих проекций может быть проекцией.
Если две ортогональные проекции коммутируют, то их произведение является ортогональной проекцией. Если продукт двух ортогональных проекций является ортогональным проектором, то эти два ортогональных проектора коммутируют (в более общем смысле: два самосопряженных эндоморфизма коммутируют тогда и только тогда, когда их произведение самосопряжено).
Ортогональные проекции
Когда векторное пространство W { displaystyle W}имеет внутренний продукт и является полным (это гильбертово пространство ) может использоваться концепция ортогональности. Ортогональная проекция — это проекция, для которой диапазон U { displaystyle U}и пустое пространство V { displaystyle V}являются ортогональными подпространствами. Таким образом, для каждого x { displaystyle x}и y { displaystyle y}в W { displaystyle W}, ⟨P Икс, (Y — п Y)⟩ знак равно ⟨(Икс — П Икс), п Y⟩ знак равно 0 { Displaystyle langle Px, (Y-Py) rangle = langle (x-Px), Py rangle = 0}. Эквивалентно:
- ⟨x, P y⟩ = ⟨P x, P y P = ⟨P x, y⟩ { displaystyle langle x, Py rangle = langle Px, Py rangle = langle Px, y rangle}.
Проекция ортогональна тогда и только тогда, когда она самосопряженная. Используя самосопряженные и идемпотентные свойства P { displaystyle P}для любых x { displaystyle x}и y { displaystyle y}в W { displaystyle W}мы имеем P x ∈ U { displaystyle Px in U}, y — P y ∈ V { displaystyle y-Py in V}и
- ⟨P x, y — P y⟩ = ⟨P 2 x, y — P y⟩ = ⟨P x, P (I — П) y⟩ знак равно ⟨п Икс, (п — п 2) y⟩ знак равно 0 { displaystyle langle Px, y-Py rangle = langle P ^ {2} x, y-Py rangle = langle Px, P (IP) y rangle = langle Px, (PP ^ {2}) y rangle = 0 ,}
где ⟨⋅, ⋅⟩ { displaystyle langle cdot, cdot rangle}— это внутренний продукт, связанный с W { displaystyle W}. Следовательно, P x { displaystyle Px}и y — P y { displaystyle y-Py}являются ортогональными проекциями. Другое направление, а именно, что если P { displaystyle P}ортогонален, то он самосопряжен, следует из
- ⟨x, P y⟩ = ⟨P x, y⟩ = ⟨Икс, P * Y⟩ { Displaystyle langle x, Py rangle = langle Px, y rangle = langle x, P ^ {*} y rangle}
для каждого x { displaystyle x}и y { displaystyle y}в W { displaystyle W}; таким образом, P = P ∗ { displaystyle P = P ^ {*}}.
-
Доказательство существования Пусть H { displaystyle H}
будет полным метрическим пространством с внутренний продукт, и пусть U { displaystyle U}будет замкнутым линейным подпространством из H { displaystyle H}(а значит, и полный).Для каждого x { displaystyle x}
следующий набор неотрицательных норм {‖ x — u ‖ | u ∈ U} { displaystyle { | xu || u in U }}имеет нижнюю границу , а из-за полноты U { displaystyle U}это минимум. Мы определяем P x { displaystyle Px}как точку в U { displaystyle U}, где достигается этот минимум.Очевидно, P x { displaystyle Px}
находится в U { displaystyle U}. Осталось показать, что P x { displaystyle Px}удовлетворяет ⟨x — P x, P x⟩ = 0 { displaystyle langle x-Px, Px rangle = 0 }и что это линейно.Определим a = x — P x { displaystyle a = x-Px}
. Для каждого ненулевого v { displaystyle v}в U { displaystyle U}выполняется следующее:- ‖ a — ⟨a, v⟩ ‖ v ‖ 2 v ‖ 2 знак равно ‖ a ‖ 2 — ⟨a, v⟩ 2 ‖ v ‖ 2 { displaystyle | a — { frac { langle a, v rangle} { | v | ^ {2}}} v | ^ {2} = | a | ^ {2} — { frac {{ langle a, v rangle} ^ {2}} { | v | ^ { 2}}}}
Определив w = P x + ⟨a, v⟩ ‖ v ‖ 2 v { displaystyle w = Px + { frac { langle a, v rangle} { | v | ^ {2}}} v}
мы видим, что ‖ x — w ‖ < ‖ x − P x ‖ {displaystyle |x-w|<|x-Px|}, если ⟨a, v⟩ { displaystyle langle a, v rangle}исчезает. Поскольку P x { displaystyle Px}был выбран как минимум из вышеупомянутого набора, следует, что ⟨a, v⟩ { displaystyle langle a, v rangle}действительно исчезает. В частности, (для y = P x { displaystyle y = Px}): ⟨x — P x, P x⟩ = 0 { displaystyle langle x-Px, Px rangle = 0}.Линейность следует из исчезновения ⟨x — P x, v⟩ { displaystyle langle x-Px, v rangle}
для каждого v ∈ U { displaystyle v in U}:- ⟨(x + y) — P (x + y), v⟩ = 0 { displaystyle langle left (x + y right) -P left (Икс + Y справа), v rangle = 0}
- ⟨(x — P x) + (y — P y), v⟩ = 0 { displaystyle langle left (x-Px right) + left (y-Py right), v rangle = 0}
Взяв разность между уравнениями, мы имеем
- ⟨P x + P y — P (x + y), v⟩ = 0 { displaystyle langle Px + Py-P left (x + y right), v rangle = 0}
Но поскольку мы можем выбрать v = P x + P y — P (x + y) { displaystyle v = Px + Py-P (x + y)}
(как в U { displaystyle U}) следует, что П Икс + Р Y знак равно п (Икс + Y) { Displaystyle Px + Py = P (x + y)}. Точно так же у нас есть λ п Икс = P (λ x) { displaystyle lambda Px = P ( lambda x)}для каждого scalar λ { displaystyle lambda}. - ‖ a — ⟨a, v⟩ ‖ v ‖ 2 v ‖ 2 знак равно ‖ a ‖ 2 — ⟨a, v⟩ 2 ‖ v ‖ 2 { displaystyle | a — { frac { langle a, v rangle} { | v | ^ {2}}} v | ^ {2} = | a | ^ {2} — { frac {{ langle a, v rangle} ^ {2}} { | v | ^ { 2}}}}
Свойства и особые случаи
Ортогональная проекция — это ограниченный оператор. Это связано с тем, что для каждого v { displaystyle v}в векторном пространстве мы имеем по неравенству Коши – Шварца :
- ‖ P v ‖ 2 = ⟨P v, P v ⟩ Знак равно ⟨п v, v⟩ ≤ ‖ п v ‖ ⋅ ‖ v ‖ { displaystyle | Pv | ^ {2} = langle Pv, Pv rangle = langle Pv, v rangle leq | Pv | cdot | v |}
Таким образом, ‖ P v ‖ ≤ ‖ v ‖ { displaystyle | Pv | leq | v |}.
Для конечномерных комплексных или вещественных векторных пространств стандартный внутренний продукт можно заменить на ⟨⋅, ⋅⟩ { displaystyle langle cdot, cdot rangle}.
Формулы
Простые случай возникает, когда ортогональная проекция находится на прямой. Если u { displaystyle u}является единичным вектором на линии, то проекция задается внешним произведением
- P u = uu T. { displaystyle P_ {u} = uu ^ { mathrm {T}}.}
(Если u { displaystyle u}имеет комплексные значения, транспонирование в приведенном выше уравнении заменяется эрмитовым транспонированием). Этот оператор оставляет u инвариантным и аннулирует все векторы, ортогональные к u { displaystyle u}, доказывая, что это действительно ортогональная проекция на линию, содержащую u. Простой способ увидеть это — рассмотреть произвольный вектор x { displaystyle x}как сумму компонента на линии (т. Е. Проецируемого вектора, который мы ищем) и другого перпендикуляра к нему, Икс = Икс ∥ + Икс ⊥ { Displaystyle x = x _ { parallel} + x _ { perp}}. Применяя проекцию, получаем
- P ux = uu T x ∥ + uu T x ⊥ = u (sign (u T x ∥) ‖ x ∥ ‖) + u ⋅ 0 = x ∥ { displaystyle P_ {u} x = uu ^ { mathrm {T}} x _ { parallel} + uu ^ { mathrm {T}} x _ { perp} = u left ( mathrm {sign} (u ^ { mathrm {T}} x _ { parallel}) | x _ { parallel} | right) + u cdot 0 = x _ { parallel}}
по свойствам точечного произведения параллельного и перпендикулярного векторов.
Эту формулу можно обобщить на ортогональные проекции на подпространство произвольной размерности. Пусть u 1,…, uk { displaystyle u_ {1}, ldots, u_ {k}}будет ортонормированным базисом подпространства U { displaystyle U}, и пусть A { displaystyle A}обозначает n × k { displaystyle n times k}матрица, столбцы которой равны u 1,…, uk { displaystyle u_ {1}, ldots, u_ {k}}, т.е. A = [u 1… uk] { displaystyle A = { begin {bmatrix} u_ {1} ldots u_ {k} end {bmatrix}}}. Тогда проекция задается следующим образом:
- PA = AAT { displaystyle P_ {A} = AA ^ { mathrm {T}}}
, который можно переписать как
- PA = ∑ i ⟨ui, ⋅ ⟩ Ui. { displaystyle P_ {A} = sum _ {i} langle u_ {i}, cdot rangle u_ {i}.}
Матрица AT { displaystyle A ^ { mathrm {T }}}— это частичная изометрия, которая исчезает в ортогональном дополнении U { displaystyle U}и A { displaystyle A }— изометрия, которая включает U { displaystyle U}в базовое векторное пространство. Диапазон P A { displaystyle P_ {A}}, следовательно, является последним пространством A { displaystyle A}. Также ясно, что AAT { displaystyle AA ^ { mathrm {T}}}является оператором идентичности в U { displaystyle U}.
Условие ортонормальности также может быть отброшенным. Если u 1,…, uk { displaystyle u_ {1}, ldots, u_ {k}}является базисом (не обязательно ортонормированным) и A { displaystyle A }— матрица с этими векторами в качестве столбцов, тогда проекция будет:
- PA = A (ATA) — 1 AT. { displaystyle P_ {A} = A (A ^ { mathrm {T}} A) ^ {- 1} A ^ { mathrm {T}}.}
Матрица A { displaystyle A }по-прежнему встраивает U { displaystyle U}в основное векторное пространство, но больше не является изометрией в целом. Матрица (A T A) — 1 { displaystyle (A ^ { mathrm {T}} A) ^ {- 1}}— это «нормализующий коэффициент», который восстанавливает норму. Например, оператор ранга 1 uu T { displaystyle uu ^ { mathrm {T}}}не является проекцией, если ‖ u ‖ ≠ 1. { displaystyle | u | neq 1.}После деления на u T u = ‖ u ‖ 2, { displaystyle u ^ { mathrm {T}} u = | u | ^ {2},}получаем проекцию u (u T u) — 1 u T { displaystyle u (u ^ { mathrm {T}} u) ^ {- 1} u ^ { mathrm {T}}}на подпространство, охватываемое u { displaystyle u}.
В общем случае мы можем иметь произвольную положительно определенную матрицу D { displaystyle D}определение внутреннего продукта ⟨x, y⟩ D = y † D x { displaystyle langle x, y rangle _ {D} = y ^ { dagger} Dx }, а проекция PA { displaystyle P_ {A}}задается как PA x = argminy ∈ range (A) ‖ x — y ‖ D 2 { displaystyle P_ {A} x = mathrm {argmin} _ {y in mathrm {range} (A)} | xy | _ {D} ^ {2}}. Тогда
- P A = A (A T D A) — 1 A T D. { displaystyle P_ {A} = A (A ^ { mathrm {T}} DA) ^ {- 1} A ^ { mathrm {T}} D.}
Когда создается пространство диапазона проекции по кадру (т. е. количество генераторов превышает его размер) формула для проекции принимает вид: PA = AA + { displaystyle P_ {A} = AA ^ {+ }}. Здесь A + { displaystyle A ^ {+}}обозначает псевдообратную матрицу Мура – Пенроуза. Это лишь один из многих способов построения оператора проекции.
Если [AB] { displaystyle { begin {bmatrix} AB end {bmatrix}}}— невырожденная матрица и ATB = 0 { displaystyle A ^ { mathrm {T}} B = 0}(например, B { displaystyle B}— матрица пустого пространства из A { displaystyle A}) выполняется следующее:
- I = [AB] [AB] — 1 [ATBT] — 1 [ATBT] = [AB] ([ATBT ] [AB]) — 1 [ATBT] = [AB] [ATAOOBTB] — 1 [ATBT] = A (ATA) — 1 AT + B (BTB) — 1 BT { displaystyle { begin {выровнено} I = { begin {bmatrix} AB end {bmatrix}} { begin {bmatrix} AB end {bmatrix}} ^ {- 1} { begin {bmatrix} A ^ { mathrm {T}} \ B ^ { mathrm {T}} end {bmatrix}} ^ {- 1} { begin {bmatrix} A ^ { mathrm {T}} \ B ^ { mathrm {T}} end {bmatrix}} = { begin {bmatrix} AB end {bmatrix}} left ({ begin {bmatrix} A ^ { mathrm {T}} \ B ^ { mathrm {T}} end {bmatrix} } { begin {bmatrix} AB end {bmatrix}} right) ^ {- 1} { begin {bmatrix} A ^ { mathrm {T}} \ B ^ { mathrm {T}} end {bmatrix}} \ = { begin {bmatrix} AB end {bmatrix }} { begin {bmatrix} A ^ { mathrm {T}} AO \ OB ^ { mathrm {T}} B end {bmatrix}} ^ {- 1} { begin {bmatrix} A ^ { mathrm {T}} \ B ^ { mathrm {T}} end {bmatrix}} \ [4pt] = A (A ^ { mathrm {T}} A) ^ {- 1} A ^ { mathrm {T}} + B (B ^ { mathrm {T}} B) ^ {- 1} B ^ { mathrm {T}} end {align}}}
Если условие ортогональности улучшено до ATWB = ATWTB = 0 { displaystyle A ^ { mathrm {T}} WB = A ^ { mathrm {T}} W ^ { mathrm {T}} B = 0}с W { displaystyle W}неособым числом, выполняется следующее:
- I = [AB] [(ATWA) — 1 AT (BTWB) — 1 BT] W. { displaystyle I = { begin {bmatrix} AB end {bmatrix}} { begin {bmatrix} (A ^ { mathrm {T}} WA) ^ {- 1} A ^ { mathrm {T}} \ (B ^ { mathrm {T}} WB) ^ {- 1} B ^ { mathrm {T}} end {bmatrix}} W.}
Все эти формулы также верны для сложных внутренних пространств продукта при условии, что вместо транспонирования используется сопряженное транспонирование. Более подробную информацию о суммах проекторов можно найти в Banerjee and Roy (2014). Также см. Banerjee (2004) о применении сумм проекторов в основной сферической тригонометрии.
Наклонные проекции
Термин «наклонные проекции» иногда используется для обозначения неортогональных проекций. Эти проекции также используются для представления пространственных фигур на двухмерных чертежах (см. наклонная проекция ), хотя и не так часто, как ортогональные проекции. В то время как для вычисления подобранного значения регрессии обычных наименьших квадратов требуется ортогональная проекция, для вычисления подобранного значения регрессии инструментальных переменных требуется наклонная проекция.
Проекции определяются своим нулевым пространством и базисными векторами, используемыми для характеристики их диапазона (который является дополнением к нулевому пространству). Когда эти базисные векторы ортогональны нулевому пространству, тогда проекция является ортогональной проекцией. Когда эти базисные векторы не ортогональны нулевому пространству, проекция является наклонной проекцией. Пусть векторы u 1,…, uk { displaystyle u_ {1}, ldots, u_ {k}}образуют основу для диапазона проекции и объединяют эти векторы в n × k { displaystyle n times k}матрица A { displaystyle A}. Диапазон и пустое пространство являются дополнительными пространствами, поэтому нулевое пространство имеет размерность n — k { displaystyle n-k}. Отсюда следует, что ортогональное дополнение пустого пространства имеет размерность k { displaystyle k}. Пусть v 1,…, vk { displaystyle v_ {1}, ldots, v_ {k}}образуют основу для ортогонального дополнения нулевого пространства проекции, и соберите эти векторы в матрице B { displaystyle B}. Тогда проекция определяется как
- P = A (B T A) — 1 B T. { displaystyle P = A (B ^ { mathrm {T}} A) ^ {- 1} B ^ { mathrm {T}}.}
Это выражение обобщает формулу для ортогональных проекций, приведенную выше.
Поиск проекции с помощью внутреннего продукта
Пусть V { displaystyle V}будет векторным пространством (в данном случае плоскостью), натянутым на ортогональные векторы u 1, u 2, ⋯, вверх { displaystyle u_ {1}, u_ {2}, cdots, u_ {p}}. Пусть y { displaystyle y}будет вектором. Можно определить проекцию y { displaystyle y}на V { displaystyle V}как
- proj V y = y ⋅ ujuj ⋅ ujuj { displaystyle operatorname {proj} _ {V} y = { frac {y cdot u ^ {j}} {u ^ {j} cdot u ^ {j}}} u ^ {j}}
, где j { displaystyle j}подразумевает нотацию суммы Эйнштейна. Вектор y { displaystyle y}может быть записан как ортогональная сумма, такая что y = proj V y + z { displaystyle y = operatorname {proj} _ {V } y + z}. proj V y { displaystyle operatorname {proj} _ {V} y}иногда обозначается как y ^ { displaystyle { hat {y} }}. В линейной алгебре есть теорема, согласно которой этот z { displaystyle z}является кратчайшим расстоянием от y { displaystyle y}до V { displaystyle V}и обычно используется в таких областях, как машинное обучение.
 y проецируется в векторное пространство V.
y проецируется в векторное пространство V.
Канонические формы
Любая проекция P = P 2 { displaystyle P = P ^ {2}}в векторном пространстве размерности d { displaystyle d}над полем представляет собой диагонализуемую матрицу, поскольку ее минимальный многочлен делит x 2 — x { displaystyle x ^ {2} -x}, который разбивается на отдельные линейные множители. Таким образом, существует базис, в котором P { displaystyle P}имеет форму
- P = I r ⊕ 0 d — r { displaystyle P = I_ {r} oplus 0_ { dr}}
, где r { displaystyle r}— это ранг P { displaystyle P}. Здесь I r { displaystyle I_ {r}}— это единичная матрица размера r { displaystyle r}, а 0 d — r { displaystyle 0_ {dr}}— нулевая матрица размера d — r { displaystyle dr}. Если векторное пространство является сложным и снабжено скалярным произведением , то существует ортонормированный базис, в котором матрица P имеет вид
- P = [1 σ 1 0 0] ⊕ ⋯ ⊕ [1 σ k 0 0] ⊕ я м ⊕ 0 s { displaystyle P = { begin {bmatrix} 1 sigma _ {1} \ 0 0 end {bmatrix}} oplus cdots oplus { begin {bmatrix} 1 sigma _ {k} \ 0 0 end {bmatrix}} oplus I_ {m} oplus 0_ {s}}.
где σ 1 ≥ σ 2 ≥… ≥ σ k>0 { displaystyle sigma _ {1} geq sigma _ {2} geq ldots geq sigma _ {k}>0}. Целые числа k, s, m { displaystyle k, s, m}и действительные числа σ i { displaystyle sigma _ {i}}определяются однозначно. Обратите внимание, что k + s + m = d { displaystyle k + s + m = d}. Фактор I m ⊕ 0 s { displaystyle I_ {m} oplus 0_ {s}}соответствует максимальному инвариантному подпространству на который P { displaystyle P}действует как ортогональная проекция (так что сама точка P ортогональна тогда и только тогда, когда k = 0 { displaystyle k = 0}) и σ i { displaystyle sigma _ {i}}-блоки соответствуют наклонным компонентам.
Проекции на нормированные векторные пространства
Когда основное векторное пространство X { displaystyle X}является (не обязательно конечномерным) нормированным В векторном пространстве необходимо рассмотреть аналитические вопросы, не относящиеся к конечномерному случаю. Предположим теперь, что X { displaystyle X}является банаховым пространством.
Многие из алгебраических результатов, обсужденных выше, переживают переход к этому контексту. Разложение заданной прямой суммы X { displaystyle X}на дополнительные подпространства по-прежнему определяет проекцию, и наоборот. Если X { displaystyle X}— прямая сумма X = U ⊕ V { displaystyle X = U oplus V}, то оператор, определяемый P (u + v) = u { displaystyle P (u + v) = u}по-прежнему является проекцией с диапазоном U { displaystyle U}и ядро V { displaystyle V}. Также ясно, что P 2 = P { displaystyle P ^ {2} = P}. И наоборот, если P { displaystyle P}является проекцией на X { displaystyle X}, то есть P 2 = P { displaystyle P ^ {2} = P}, тогда легко проверить, что (1 — P) 2 = (1 — P) { displaystyle (1-P) ^ {2} = (1- P)}. Другими словами, 1 — P { displaystyle 1-P}также является проекцией. Отношение P 2 = P { displaystyle P ^ {2} = P}подразумевает 1 = P + (1 — P) { displaystyle 1 = P + (1-P) }и X { displaystyle X}— прямая сумма ran (P) ⊕ ran (1 — P) { displaystyle mathrm {ran} ( P) oplus mathrm {ran} (1-P)}.
Однако, в отличие от конечномерного случая, проекции не обязательно должны быть непрерывными в целом. Если подпространство U { displaystyle U}из X { displaystyle X}не замкнуто в топологии нормы, то проекция на U { displaystyle U}не является непрерывным. Другими словами, диапазон непрерывной проекции P { displaystyle P}должен быть замкнутым подпространством. Кроме того, ядро непрерывной проекции (в общем, непрерывного линейного оператора) замкнуто. Таким образом, непрерывная проекция P { displaystyle P}дает разложение X { displaystyle X}на два дополнительных закрытых подпространства: X = ran (P) ⊕ ker (P) знак равно ker (1 — P) ⊕ ker (P) { displaystyle X = mathrm {ran} (P) oplus mathrm {ker} (P) = mathrm {ker} ( 1-P) oplus mathrm {ker} (P)}.
Обратное также верно с дополнительным предположением. Предположим, что U { displaystyle U}является замкнутым подпространством X { displaystyle X}. Если существует замкнутое подпространство V { displaystyle V}такое, что X = U ⊕ V, то проекция P { displaystyle P}с диапазоном U { displaystyle U}и ядро V { displaystyle V}является непрерывным. Это следует из теоремы о замкнутом графике. Предположим, что x n → x и Px n → y. Необходимо показать, что P x = y { displaystyle Px = y}. Поскольку U { displaystyle U}замкнут и {Px n } ⊂ U, y лежит в U { displaystyle U}, т.е. Py = y. Кроме того, x n — Px n = (I — P) x n → x — y. Поскольку V { displaystyle V}закрыто и {(I — P) x n } ⊂ V, мы имеем x — y ∈ V { displaystyle xy in V}, т.е. P (x — y) = P x — P y = P x — y = 0 { displaystyle P (xy) = Px-Py = Px-y = 0}, что доказывает утверждение.
В приведенном выше аргументе используется предположение, что оба U { displaystyle U}и V { displaystyle V}закрыты. В общем случае, учитывая замкнутое подпространство U { displaystyle U}, может не существовать дополнительное замкнутое подпространство V { displaystyle V}, хотя для Гильбертовы пространства это всегда можно сделать, взяв ортогональное дополнение. Для банаховых пространств одномерное подпространство всегда имеет замкнутое дополнительное подпространство. Это непосредственное следствие теоремы Хана – Банаха. Пусть U { displaystyle U}будет линейным промежутком u { displaystyle u}. По Хану-Банаху существует ограниченный линейный функционал φ { displaystyle varphi}такой, что φ (u) = 1. Оператор P (x) = φ (x) u { displaystyle P (x) = varphi (x) u}удовлетворяет P 2 = P { displaystyle P ^ {2} = P}, т.е. это проекция. Ограниченность φ { displaystyle varphi}подразумевает непрерывность P { displaystyle P}и, следовательно, ker (P) = ran ( I — P) { displaystyle operatorname {ker} (P) = operatorname {ran} (IP)}— это закрытое дополнительное подпространство U { displaystyle U}.
Applications и другие соображения
Проекции (ортогональные и другие) играют важную роль в алгоритмах для некоторых задач линейной алгебры:
Как указано выше, проекции являются частным случаем идемпотентов. Аналитически ортогональные проекции являются некоммутативными обобщениями характеристики ристические функции. Идемпотенты используются при классификации, например, полупростых алгебр, тогда как теория меры начинается с рассмотрения характеристических функций измеримых множеств. Поэтому, как можно догадаться, проекции очень часто встречаются в контекстных операторных алгебрах. В частности, алгебра фон Неймана порождается ее полной решеткой проекций.
Обобщения
В более общем смысле, если дана карта между нормированными векторными пространствами T: V → W, { displaystyle T двоеточие V to W,}аналогично можно попросить, чтобы это отображение было изометрией на ортогональном дополнении ядра: (ker T) ⊥ → W { displaystyle ( ker T) ^ { perp} to W}быть изометрией (сравните Частичная изометрия ); в частности он должен быть включен. Случай ортогональной проекции — это когда W является подпространством V. В римановой геометрии это используется в определении римановой субмерсии.
См. Также
Примечания
Источники
- Банерджи, Судипто; Рой, Аниндия (2014), Линейная алгебра и матричный анализ для статистики, Тексты в статистике (1-е изд.), Чепмен и Холл / CRC, ISBN 978-1420095388
- Данфорд, Нью-Йорк.; Шварц, Дж. Т. (1958). Линейные операторы. Часть I: Общая теория. Interscience.
- Мейер, Карл Д. (2000). Матричный анализ и прикладная линейная алгебра. Общество промышленной и прикладной математики. ISBN 978-0-89871-454-8.