Содержание:
Определение: Вектором называется направленный отрезок прямой 
где А — начало, а В — конец вектора.
Замечание: Векторы в основном обозначают одной прописной буквой латинского алфавита со стрелочкой (или черточкой) наверху  .
.
Определение: Если начало и конец вектора  не закреплены, то он называется свободным.
не закреплены, то он называется свободным.
Замечание: Свободный вектор можно перемещать как вдоль его прямой, так и параллельно самому себе.
Определение: Если зафиксирована точка, которая определяет начало вектора, то она называется точкой приложения вектора.
Определение: Длиной (модулем) вектора а называется расстояние от его начала до его конца: 
Определение: Векторы называются коллинеарными (Рис. 1), если они лежат на одной прямой или в параллельных прямых.
Рис.1. Коллинеарные векторы.
Определение: Векторы называются компланарными (Рис. 2), если они лежат в одной плоскости или параллельных плоскостях.
Рис.2. Компланарные векторы.
Определение: Два коллинеарных вектора  и
и  называются равными, если они со-направлены и имеют одинаковую длину.
называются равными, если они со-направлены и имеют одинаковую длину.
Определение вектора и основные свойства
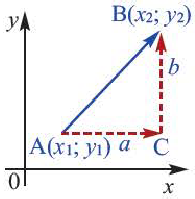
Многие величины, например, масса, длина, время, температура и др. характеризуются только числовыми значениями. Такие величины называются скалярными величинами. Некоторые же величины, например, скорость, ускорение, сила и др. определяются как числовыми значениями, так и направлением. Такие величины называются векторными величинами. Перемещение — самый простой пример векторных величин. Перемещение тела из точки  в точку
в точку  изображается с помощью направленного от до
изображается с помощью направленного от до  отрезка — вектора. Вектор изображается с помощью направленного отрезка.
отрезка — вектора. Вектор изображается с помощью направленного отрезка.
Длина этого отрезка, называется длиной или модулем вектора. Вектор обозначается указанием начальной и конечной точки. Например, вектор  , здесь — начало, вектора. Вектор обозначается также и маленькими буквами, например, вектор
, здесь — начало, вектора. Вектор обозначается также и маленькими буквами, например, вектор  . Длину вектора
. Длину вектора  обозначают, как:
обозначают, как: 
Два вектора называется равными, если они равны по модулю и одинаково направлены. На рисунке векторы  и
и  равны:
равны:  .
.
• Два вектора называются противоположными, если они равны по модулю и противоположно направлены.


Векторы  и
и  противоположны:
противоположны: 
Если начало и конец вектора совпадают, то такой вектор называется нулевым и обозначается  Длина нулевого вектора равна 0, а направление не определено. Если направленные отрезки, изображающие векторы, параллельны или лежат на одной и той же прямой, то они называются коллинеарными векторами. Коллинеарные вектора могут быть одинаково направлены или противоположно направлены. Одинаково направленные вектора обозначаются как
Длина нулевого вектора равна 0, а направление не определено. Если направленные отрезки, изображающие векторы, параллельны или лежат на одной и той же прямой, то они называются коллинеарными векторами. Коллинеарные вектора могут быть одинаково направлены или противоположно направлены. Одинаково направленные вектора обозначаются как  , а противоположно направленные
, а противоположно направленные  .
.
На рисунке векторы  -коллинеарные векторы. Здесь
-коллинеарные векторы. Здесь 
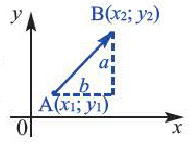
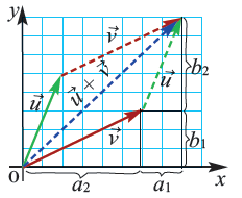
Выражения вектора компонентами в координатной плоскости
Рассмотрим вектор на координатной плоскости. Конечная точка  относительно начальной точки
относительно начальной точки  изменила свое положение вдоль оси
изменила свое положение вдоль оси  на
на  (при
(при  направо, при
направо, при  налево), вдоль оси
налево), вдоль оси  на
на  (при
(при  вверх, при
вверх, при  вниз). Векторы
вниз). Векторы  и
и  , определенные (и по модулю, и по направлению) парами чисел
, определенные (и по модулю, и по направлению) парами чисел  и
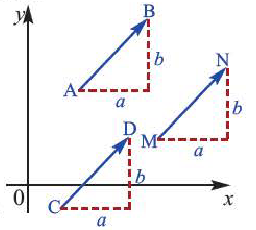
и  (как указано выше), являются компонентами вектора . На координатной плоскости вектор записывается как
(как указано выше), являются компонентами вектора . На координатной плоскости вектор записывается как  . Эта запись называется записью вектора с компонентами.
. Эта запись называется записью вектора с компонентами.
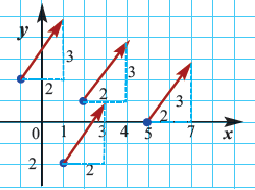
Равные векторы имеют равные компоненты. Наоборот, если, соответствующие компоненты векторов равны, то эти векторы равны. На рисунке  . Если дан какой либо вектор
. Если дан какой либо вектор  , то выбрав любую точку плоскости как начало, можно построить вектор равный данному, причем только один. Значит, выбирая разные начальные точки можно построить бесконечно много векторов равных данному.
, то выбрав любую точку плоскости как начало, можно построить вектор равный данному, причем только один. Значит, выбирая разные начальные точки можно построить бесконечно много векторов равных данному.
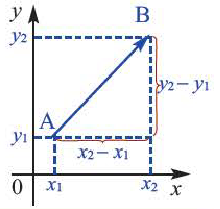
На координатной плоскости вектор  с начальной точкой
с начальной точкой  и конечной точкой
и конечной точкой  согласно координатам этих точек можно выразить с компонентами. Так как
согласно координатам этих точек можно выразить с компонентами. Так как  , то
, то  . Здесь
. Здесь  называются также координатами вектора.
называются также координатами вектора.
Длина вектора
Длину вектора можно найти по координатам начальной у и конечной точек, используя формулу расстояния между точками.

Длину вектора данными с компонентами можно найти по формуле: 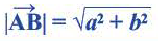
Пример 1.
Напишите вектор  начальная точка которого
начальная точка которого  , конечная
, конечная  в виде
в виде 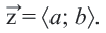
Решение: Напишем вектор с компонентами: 

Пример 2.
Точка  начальная точка вектора
начальная точка вектора  Найдите координаты конечной точки этого вектора.
Найдите координаты конечной точки этого вектора.
Решение: Примем за координаты конечной точки вектора  — точку
— точку  : Тогда
: Тогда  . Конечная точка этого вектора
. Конечная точка этого вектора 
Пример 3.
В координатной плоскости нарисуйте несколько векторов равных вектору  начальными точками которых являются точки
начальными точками которых являются точки  .
.
Решение: Данные точки отмечаются на координатной плоскости. Начиная с этих точек изображаются векторы равные 
Пример 4.
 и
и  соответственно начальная и конечная точка вектора
соответственно начальная и конечная точка вектора  . Напишите этот вектор в виде
. Напишите этот вектор в виде  и найдите длину
и найдите длину 
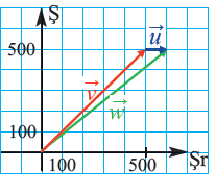
Направление вектора
В соответствии с областями применения существуют различные способы определения направления вектора. В повседневной жизни мы выражаем направление словами налево, направо, вниз, вверх или же восток, запад, север, юг. На координатной плоскости направление вектора определяется углом с положительным направлением оси  против часовой стрелки. Этот угол назовем углом наклона.
против часовой стрелки. Этот угол назовем углом наклона.
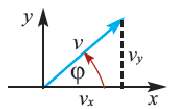
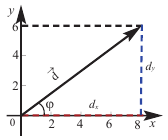
На рисунке длина вектора  обозначена
обозначена  а угол, определяющий направление, через
а угол, определяющий направление, через  .
.
длина вектора: 
направление вектора:  или
или 
Иногда для простоты вектор изображается на плоскости только указанием положительного направления  .
.
Пример 1.
Вектор перемещения, модуль которого 200 м, направлен под углом наклона  Выбрав масштаб 1 см : 100 м, нарисуйте этот вектор.
Выбрав масштаб 1 см : 100 м, нарисуйте этот вектор.
Решение: От начала луча, образующий с положительным направлением оси угол в  , соответственно масштабу 1 см : 100 м линейкой отложим отрезок длиной 2 см.
, соответственно масштабу 1 см : 100 м линейкой отложим отрезок длиной 2 см.
Пример 2.
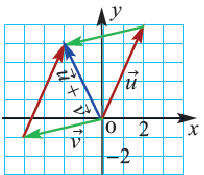
Определите длину и угол наклона вектора 
Решение: Произвольную точку на координатной плоскости примем за начало вектора. От этой точки по горизонтальной оси отложим компоненту  , равную 3 единицам, по вертикальной оси отложим компоненту
, равную 3 единицам, по вертикальной оси отложим компоненту  , равную 4 единицам, и построим вектор
, равную 4 единицам, и построим вектор  как показано на рисунке. Если измерить транспортиром угол
как показано на рисунке. Если измерить транспортиром угол  , то можно увидеть, что его приближенное значение равно
, то можно увидеть, что его приближенное значение равно  Это можно проверить вычислениями.
Это можно проверить вычислениями.
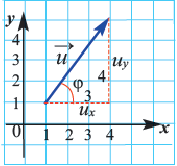
Длина вектора:  Угол наклона:
Угол наклона: 
Сложение и вычитание коллинеарных векторов
Вектор, показывающий сумму одинаково направленных коллинеарных векторов называется результирующим. Его абсолютная величина равна сумме абсолютных величин данных векторов, а сам вектор имеет одинаковое направление с данными векторами.

Абсолютная величина результирующего вектора 2-х противоположно-направленных коллинеарных векторов равна разности абсолютных величин этих векторов, а направление совпадает с направлением вектора большего по абсолютной величине.

Выполним графически сложение векторов, соответствующее реальным жизненным ситуациям.
Задача 1.
Для того, чтобы достичь финиша, Джамиля должна пройти 3 знака. Если она пройдет 10 м на восток, то доберется до 1-го знака, потом пройдя 50 м вперед до 2-го знака и, пройдя в том же направлении еще 20 м, сможет добраться до финиша. Изобразите движение Джамили графически — векторами. Выберем масштаб:
1 см : 10 м и на числовой оси нарисуем векторы так, чтобы начало второго вектора совпало с концом первого, а начало третьего с концом второго.

Результирующий вектор обозначим через  Его длину можно выразить как:
Его длину можно выразить как: 
Общее перемещение: 10 м + 50 м + 20 м = 80 м (на восток) Изображается вектор  длиной 8 см согласно выбранному масштабу.
длиной 8 см согласно выбранному масштабу.
Задача 2.
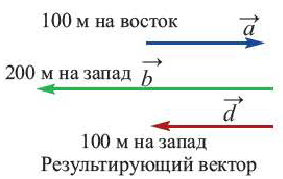
Представьте, что вы прошли 100 м на восток, еще 200 метров на запад.
Нарисуем данные вектора в масштабе
По определению, модуль результирующего вектора равен разности модулей векторов. А направление будет на запад.
В этом случае длина результирующего вектора  равна:
равна: 
200 м 100 м = 100 м (на запад)
Пусть векторы  и
и  противоположно направленные, а
противоположно направленные, а  их результирующий вектор. При
их результирующий вектор. При  и вектор
и вектор  одинаково направлен с вектором .
одинаково направлен с вектором .
При  и вектор одинаково направлен с вектором .
и вектор одинаково направлен с вектором .
При 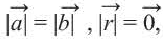 то есть сумма противоположных векторов равна
то есть сумма противоположных векторов равна  вектору.
вектору.
Для того, чтобы найти разность  нужно к вектору
нужно к вектору  прибавить вектор
прибавить вектор  , противоположный вектору
, противоположный вектору  .
.
То есть выражения  эквивалентные.
эквивалентные.


Жившие в XVII веке ученые-математики Рене Декарт и Пьер Ферма, взаимосвязывая алгебру и геометрию, создали новую область науки-аналитическую геометрию. Аналитическая геометрия, благодаря методу координат, позволила, с одной стороны, посредством алгебраических выкладок легко доказывать геометрические теоремы, а с другой стороны, в силу наглядности геометрических представлений упрощает решение задач над векторами.
Сложение векторов
Существуют различные способы сложения неколлинеарных векторов. Рассмотрим два графических способа. При сложении векторов графическим способом данные вектора и результирующий вектор, показывающий их сумму строятся с помощью линейки (модуль) и транспортира(направление).
Вектора можно складывать в любой последовательности. Переместительное свойство сложения верно и для векторов. По этому правилу можно складывать три и более вектора. Определим графическим способом вектор  Для этого: 1) нарисуем вектор
Для этого: 1) нарисуем вектор  противоположный вектору
противоположный вектору  2)
2)  переместим так, чтобы конечная точка вектора
переместим так, чтобы конечная точка вектора  совпадала с начальной точкой вектора
совпадала с начальной точкой вектора 
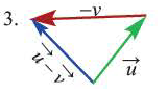
3. Соединим начальную точку вектора  и конечную точку вектора
и конечную точку вектора  Это будет вектор
Это будет вектор 
Пример 1.
Джамал прошел от палатки, разбитой в лагере 60 метров на юг, 120 м на восток, еще 100 м на север и дошел до озера. Какое наименьшее расстояние от палатки до озера?
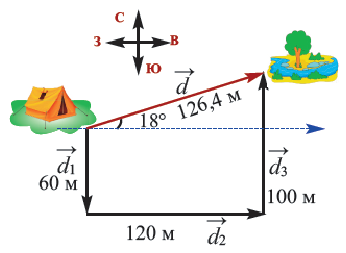
Решение:
Выберем масштаб: 1 см : 40 м
Движение Джамала изобразим последовательно соответствующими векторами по выбранному масштабу.
Начальную точку 1-го вектора, показывающего движение Джамала, соединим с конечной точкой 3-го вектора. Полученный результирующий вектор  выражает сумму векторов
выражает сумму векторов 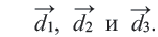 Длина этого вектора приблизительно 126,4 метров, а направление под углом
Длина этого вектора приблизительно 126,4 метров, а направление под углом 
Ответ: Озеро находится на расстоянии 126,4 м от палатки.
Правило параллелограмма
1. Даны вектора:  и
и 
2. Переместим вектор  так, чтобы начальные точки векторов
так, чтобы начальные точки векторов  и совпадали.
и совпадали.
3. Построим параллелограмм со сторонами и параллельным переносом соответствующих векторов и  Диагональ этого параллелограмма, которая соединяет начальную и конечную точку векторов
Диагональ этого параллелограмма, которая соединяет начальную и конечную точку векторов  показывает их сумму:
показывает их сумму: 
Переместительные и сочетательные свойства сложения векторов
Для любых векторов  верно следующее:
верно следующее:
Переместительное свойство: 
Сочетательное свойство: 
Свойство идентичности: 
Сумма противоположенных векторов: 
Пример:
Сложение векторов, заданных компонентами
Выполним сложение двух векторов на координатной плоскости, используя их компоненты.
Суммой векторов  и
и  будет вектор:
будет вектор: 
Пример 1.
Если  и
и  то вектор
то вектор  выразите через компоненты.
выразите через компоненты.
Решение: Для того, чтобы найти компоненты вектора  нужно по горизонтали (оси абсцисс) и по вертикали (оси ординат) сложить соответствующие компоненты векторов
нужно по горизонтали (оси абсцисс) и по вертикали (оси ординат) сложить соответствующие компоненты векторов 

Пример 2.
Самолет летит в направлении северо-востока со скоростью 707 миль/час. Скорость самолета выражается вектором  В восточном направлении дует ветер со скоростью 40 миль/час. Скорость ветра выражается вектором
В восточном направлении дует ветер со скоростью 40 миль/час. Скорость ветра выражается вектором  Как изменится скорость самолета под воздействием ветра?
Как изменится скорость самолета под воздействием ветра? 
Конечная скорость самолета:
Аналогично можно показать, что 
Пример 3.
Если  , то
, то 
Тригонометрические отношения и компоненты вектора
Найдем компоненты вектора  в координатной плоскости, используя тригонометрические отношения. Обозначим
в координатной плоскости, используя тригонометрические отношения. Обозначим 
 имеем:
имеем: 
Запись  также является записью вектора с компонентами. Угол наклона можно найти по формуле
также является записью вектора с компонентами. Угол наклона можно найти по формуле 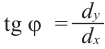
Пример 1.
Автомобиль движется в северо-восточном направлении под углом  со скоростью 80 км/ч. Напишите вектор скорости с компонентами.
со скоростью 80 км/ч. Напишите вектор скорости с компонентами.
Решение: По данным 

скорость в вост. напр. 
скорость в север, напр. 
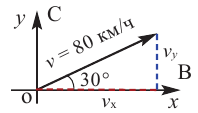
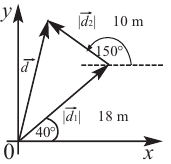
Пример 2.
Движения мяча изображены двумя векторами:  с углом наклона
с углом наклона  и модулем равным 18 м и
и модулем равным 18 м и  с углом наклона
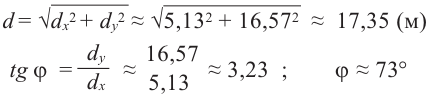
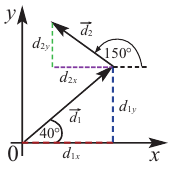
с углом наклона  и модулем равным 10 м. Определите вектор, показывающий перемещение мяча (модуль и направление).
и модулем равным 10 м. Определите вектор, показывающий перемещение мяча (модуль и направление).
Решение: Перемещение мяча:  Запишем векторы
Запишем векторы  c компонентами:
c компонентами: 
Здесь 

Пусть 
По правилу сложения векторов с заданными компонентами имеем: 
Найдем длину и угол наклона вектора перемежения  мяча, изобразив этот вектор в новой системе координат.
мяча, изобразив этот вектор в новой системе координат.

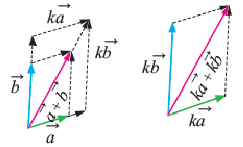
Умножение вектора на число
Произведение вектора на число
на число  записывается как
записывается как  а его длина равна
а его длина равна  при
при  вектора
вектора 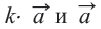 имеют одинаковое направление, при
имеют одинаковое направление, при  вектора
вектора  имеют противоположное направление.
имеют противоположное направление. 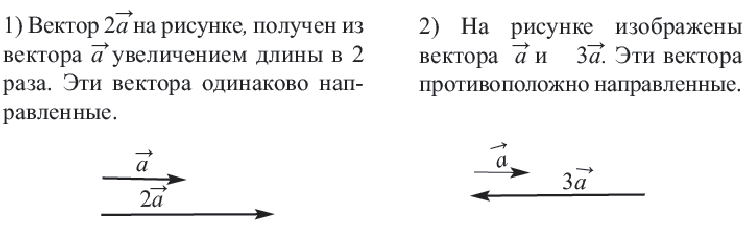 Любой вектор коллинеарен вектору, выражающему произведение этого вектора на число (отличное от нуля). Если
Любой вектор коллинеарен вектору, выражающему произведение этого вектора на число (отличное от нуля). Если  и
и  коллинеарные векторы, то существует единственное число
коллинеарные векторы, то существует единственное число  что
что 
Свойство умножения вектора на число
1. Сочетательное свойство.
Для любых чисел  и вектора
и вектора 

2. Распределительное свойство.
Для любых чисел 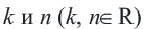 и вектора
и вектора 

Для любого числа  и векторов
и векторов 

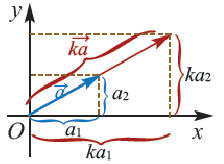
Действия над векторами, заданным над координатами
Для вектора  заданного компонентами и для любого числа
заданного компонентами и для любого числа  верно:
верно: 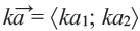
Пример: Если 
Пример: Если 

• Соответствующие координаты коллинеарных векторов пропорциональны.
• Наоборот, если соответствующие координаты векторов пропорциональны, то эти векторы коллинеарные.
Условие коллинеарности векторов  (при
(при  )
)
Пример: При каком значении  векторы
векторы  коллинеарны?
коллинеарны?
Подробное объяснение вектора:
Определение: Вектор — Упорядоченную совокупность  n вещественных чисел называют n-мерным вектором, а числа
n вещественных чисел называют n-мерным вектором, а числа  — компонентами, или координатами, вектора.
— компонентами, или координатами, вектора.
Пример:
Если, например, некоторый автомобильный завод должен выпустить в смену 50 легковых автомобилей, 100 грузовых, 10 автобусов, 50 комплектов запчастей для легковых автомобилей и 150 комплектов для грузовых автомобилей и автобусов, то производственную программу этого завода можно записать в виде вектора (50, 100, 10, 50, 150), имеющего пять компонент.
Обозначения:
Векторы обозначают жирными строчными буквами или буквами с чертой или стрелкой наверху, например,  Два вектора называются равными, если они имеют одинаковое число компонент и их соответствующие компоненты равны.
Два вектора называются равными, если они имеют одинаковое число компонент и их соответствующие компоненты равны.
Компоненты вектора нельзя менять местами, например, (3, 2, 5, 0, 1)  (2, 3, 5, 0, 1).
(2, 3, 5, 0, 1).
Операции над векторами. Произведением вектора  на действительное число
на действительное число  называется вектор
называется вектор  Суммой векторов
Суммой векторов  и
и  называется вектор
называется вектор 
Пространство векторов. N-мерное векторное пространство  определяется как множество всех n-мерных векторов, для которых определены операции умножения на действительные числа и сложение.
определяется как множество всех n-мерных векторов, для которых определены операции умножения на действительные числа и сложение.
Экономическая иллюстрация. Экономическая иллюстрация n-мерного векторного пространства: пространство благ (товаров). Под товаром мы будем понимать некоторое благо или услугу, поступившие в продажу в определенное время в определенном месте. Предположим, что существует конечное число наличных товаров n; количества каждого из них, приобретенные потребителем, характеризуются набором товаров

где через  обозначается количество
обозначается количество  блага, приобретенного потребителем. Будем считать, что все товары обладают свойством произвольной делимости, так что может быть куплено любое неотрицательное количество каждого из них. Тогда все возможные наборы товаров являются векторами пространства товаров
блага, приобретенного потребителем. Будем считать, что все товары обладают свойством произвольной делимости, так что может быть куплено любое неотрицательное количество каждого из них. Тогда все возможные наборы товаров являются векторами пространства товаров 
Линейная независимость. Система  n-мерных векторов называется линейно зависимой, если найдутся такие числа
n-мерных векторов называется линейно зависимой, если найдутся такие числа  из которых хотя бы одно отлично от нуля, что выполняется равенство
из которых хотя бы одно отлично от нуля, что выполняется равенство  в противном случае данная система векторов называется линейно независимой, то есть указанное равенство возможно лишь в случае, когда все
в противном случае данная система векторов называется линейно независимой, то есть указанное равенство возможно лишь в случае, когда все  Геометрический смысл линейной зависимости векторов в
Геометрический смысл линейной зависимости векторов в  интерпретируемых как направленные отрезки, поясняют следующие теоремы.
интерпретируемых как направленные отрезки, поясняют следующие теоремы.
Теорема 1. Система, состоящая из одного вектора, линейно зависима тогда и только тогда, когда этот вектор нулевой.
Теорема 2. Для того, чтобы два вектора были линейно зависимы, необходимо и достаточно, чтобы они были коллинеарны.
Теорема 3. Для того, чтобы три вектора были линейно зависимы, необходимо и достаточно, чтобы они были компланарны.
Левая и правая тройки векторов. Тройка некомпланарных векторов  называется правой, если наблюдателю из их общего начала обход концов векторов
называется правой, если наблюдателю из их общего начала обход концов векторов  в указанном порядке кажется совершающимся по часовой стрелке. В противном случае
в указанном порядке кажется совершающимся по часовой стрелке. В противном случае  — левая тройка. Все правые (или левые) тройки векторов называются одинаково ориентированными.
— левая тройка. Все правые (или левые) тройки векторов называются одинаково ориентированными.
Базис и координаты. Тройка  некомпланарных векторов в называется базисом, а сами векторы
некомпланарных векторов в называется базисом, а сами векторы  — базисными. Любой вектор
— базисными. Любой вектор  может быть единственным образом разложен по базисным векторам, то есть представлен в виде
может быть единственным образом разложен по базисным векторам, то есть представлен в виде  (1.1) числа
(1.1) числа  в разложении (1.1) называются координатами вектора
в разложении (1.1) называются координатами вектора  в базисе
в базисе  и обозначаются
и обозначаются 
Ортонормированный базис. Если векторы  попарно перпендикулярны и длина каждого из них равна единице, то базис называется ортонормированным, а координаты
попарно перпендикулярны и длина каждого из них равна единице, то базис называется ортонормированным, а координаты  прямоугольными. Базисные векторы ортонормированного базиса будем обозначать
прямоугольными. Базисные векторы ортонормированного базиса будем обозначать  Будем предполагать, что в пространстве выбрана правая система декартовых прямоугольных координат
Будем предполагать, что в пространстве выбрана правая система декартовых прямоугольных координат 
Векторное произведение. Векторным произведением вектора  на вектор
на вектор  называется вектор
называется вектор  , который определяется следующими тремя условиями:
, который определяется следующими тремя условиями:
- Длина вектора
 численно равна площади параллелограмма, построенного на векторах
численно равна площади параллелограмма, построенного на векторах - Вектор перпендикулярен к каждому из векторов
- Векторы взятые в указанном порядке, образуют правую тройку.
 численно равна площади параллелограмма, построенного на векторах
численно равна площади параллелограмма, построенного на векторах 
 перпендикулярен к каждому из векторов
перпендикулярен к каждому из векторов 
 взятые в указанном порядке, образуют правую тройку.
взятые в указанном порядке, образуют правую тройку.Для векторного произведения  вводится обозначение
вводится обозначение 
Если векторы  коллинеарны, тo
коллинеарны, тo  в частности,
в частности,  Векторные произведения ортов:
Векторные произведения ортов:  Если векторы
Если векторы  заданы в базисе
заданы в базисе  координатами
координатами  то
то  Смешанное произведение. Если векторное произведение двух векторов
Смешанное произведение. Если векторное произведение двух векторов  скалярно умножается на третий вектор
скалярно умножается на третий вектор  , то такое произведение трех векторов называется смешанным произведением и обозначается символом
, то такое произведение трех векторов называется смешанным произведением и обозначается символом  Если векторы
Если векторы  в базисе
в базисе  заданы своими координатами
заданы своими координатами 
Смешанное произведение имеет простое геометрическое толкование — это скаляр, по абсолютной величине равный объему параллелепипеда, построенного на трех данных векторах.
Если векторы образуют правую тройку, то их смешанное произведение есть число положительное, равное указанному объему; если же тройка  — левая, то
— левая, то  и
и  следовательно
следовательно 
Координаты векторов, встречающиеся в задачах первой главы, предполагаются заданными относительно правого ортонормированного базиса. Единичный вектор, сонаправленный вектору  обозначается символом
обозначается символом  Символом
Символом  обозначается радиус-вектор точки М, символами
обозначается радиус-вектор точки М, символами  обозначаются модули векторов
обозначаются модули векторов 
Пример №1
Найдите угол между векторами единичные векторы и угол между
единичные векторы и угол между  равен 120°.
равен 120°.
Решение:
Имеем: 




Окончательно имеем: 
Пример №2
Зная векторы АВ(-3,-2,6) и ВС(-2,4,4), вычислите длину высоты AD треугольника АВС.
Решение:
Обозначая площадь треугольника АВС через S, получим:

 значит, вектор
значит, вектор  имеет координаты
имеет координаты  (—5,2,10).
(—5,2,10).


Пример №3
Даны два вектора  Найдите единичный вектор
Найдите единичный вектор  , ортогональный векторам
, ортогональный векторам  и направленный так, чтобы упорядоченная тройка векторов
и направленный так, чтобы упорядоченная тройка векторов 
 была правой.
была правой.
Решение:
Обозначим координаты вектора  относительно данного правого ортонормированного базиса через
относительно данного правого ортонормированного базиса через  Поскольку
Поскольку  По условию задачи требуется, чтобы
По условию задачи требуется, чтобы  и
и  Имеем систему уравнений для нахождения
Имеем систему уравнений для нахождения 
Из первого и второго уравнений системы получим  Подставляя
Подставляя  в третье уравнение, будем иметь:
в третье уравнение, будем иметь: 
Используя условие  получим неравенство
получим неравенство 
С учетом выражений для  перепишем полученное неравенство в виде:
перепишем полученное неравенство в виде:  откуда следует, что
откуда следует, что 
Линейные операции над векторами
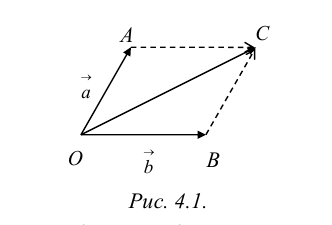
1. Сумма векторов. Для нахождения суммы векторов существует два правила: а) правило треугольника. Пусть векторы и неколлинеарные и пусть начало вектора совмещено с концом вектора , тогда их суммой будет вектор  начало которого совпадает с началом вектора , а его конец — с концом вектора (Рис. 3):
начало которого совпадает с началом вектора , а его конец — с концом вектора (Рис. 3):
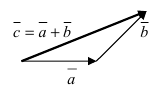
Рис. 3. Сложение векторов по правилу треугольника.
б) правило параллелограмма. Пусть векторы  неколлинеарные и пусть начала векторов
неколлинеарные и пусть начала векторов  совпадают. Построим на векторах
совпадают. Построим на векторах  параллелограмм (Рис. 4), тогда их суммой будет вектор
параллелограмм (Рис. 4), тогда их суммой будет вектор  начало которого совпадает с общим началом векторов , а его конец лежит в противоположной вершине параллелограмма:
начало которого совпадает с общим началом векторов , а его конец лежит в противоположной вершине параллелограмма: 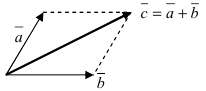
Рис. 4. Сложение векторов по правилу параллелограмма.
Сумма векторов обладает следующими свойствами:
-переместительным  ; — сочетательным
; — сочетательным 
2. Разность векторов. Разностью векторов  называется вектор
называется вектор  сумма которого с вектором
сумма которого с вектором  дает вектор
дает вектор  (Рис. 5):
(Рис. 5): 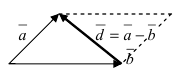 Рис. 5. Разность векторов.
Рис. 5. Разность векторов.
3. Умножение вектора на вещественное число. При умножении веществе иного числа k на вектор  получают ему коллинеарный вектор
получают ему коллинеарный вектор  длина которого равна
длина которого равна  сонаправленный с вектором
сонаправленный с вектором  если
если  и антинаправленный вектору
и антинаправленный вектору  если
если 
Замечание: Числа в векторной алгебре называют скалярами. Отметим здесь, что векторы и скаляры нельзя складывать и вычитать, так как это объекты разной природы.
Замечание: Из определения операции 3 следует первое условие коллинеарности векторов:  — отношения соответствующих проекции векторов должны быть равны между собой (о проекциях векторов см. ниже пункты 3 и 4).
— отношения соответствующих проекции векторов должны быть равны между собой (о проекциях векторов см. ниже пункты 3 и 4).
Пример №4
Найти произведение вектора  на 2 и (-3).
на 2 и (-3).
Решение:
Используя вышеприведенное правило, получим 
Произведение числа на вектор обладает следующими свойствами:
Замечание: Если k = 0, то в результате умножения  , получают нулевой вектор.
, получают нулевой вектор.
Определение: Нулевым вектором называется вектор, начало и конец которого совпадают, т.е. расположены в одной точке.
Проекция вектора на произвольную ось
Пусть дана ось l и вектор  Проведем через начало вектора
Проведем через начало вектора  прямую,
прямую,
которая параллельна оси l, угол между прямой и вектором  обозначим через
обозначим через  (Рис. 6):
(Рис. 6):
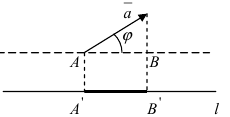
Рис. 6. Проекция вектора на заданную ось.
Из начала и конца вектора  опустим на ось l перпендикуляры, получим отрезок
опустим на ось l перпендикуляры, получим отрезок 
Определение: Проекцией вектора  на ось l называется длина отрезка
на ось l называется длина отрезка  взятая со знаком «+», если угол
взятая со знаком «+», если угол  и со знаком «-», если
и со знаком «-», если  Из рисунка видно, что отрезок
Из рисунка видно, что отрезок  следовательно,
следовательно,  Из этой формулы видно, что при
Из этой формулы видно, что при 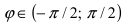 величина
величина  а при
а при  величина
величина  При
При  проекция равна нулю, Т. е.
проекция равна нулю, Т. е. 
Проекции обладают свойствами:
— если  то
то 
Декартова система координат и вектора
Определение: Направленная прямая с выбранным началом отсчета и масштабом измерения называется числовой осью.
Определение: Две (три) взаимно перпендикулярные числовые оси называются декартовой системой координат на плоскости (в пространстве).
Рассмотрим декартову систему координат и спроектируем вектор  на координатные оси (Рис. 7).
на координатные оси (Рис. 7). 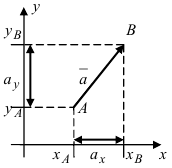
Рис. 7. Проекции вектора на оси декартовой системы координат.
Из рисунка видно, что проекции вектора  на:
на:
(в пространстве — ось аппликат (Oz)  ).
).
Определение: Проекции  называются координатами вектора
называются координатами вектора  Используя теорему Пифагора, найдем длину вектора
Используя теорему Пифагора, найдем длину вектора 

Направляющие косинусы вектора

Обозначим углы, которые образует вектор  с положительными направлениями координатных осей пространственной декартовой системы отсчета через
с положительными направлениями координатных осей пространственной декартовой системы отсчета через  Тогда
Тогда 
Определение: Величины  называются направляющими косинусами вектора
называются направляющими косинусами вектора 
Вычислив квадрат модуля вектора  найдем соотношение, которое связывает направляющие косинусы вектора
найдем соотношение, которое связывает направляющие косинусы вектора 

Способы задания вектора
- Задаются координаты начальной и конечной точек вектора и. Тогда
- Задаются аффинные координаты вектора
- Задаются длина вектора и два любых угла, которые образует вектор с какими-либо координатными осями и знак одной из проекций:, но так как по условию , то . Следовательно,
 и
и . Тогда
. Тогда 

 с какими-либо координатными осями и знак одной из проекций:
с какими-либо координатными осями и знак одной из проекций:
 , но так как по условию
, но так как по условию  , то
, то  . Следовательно,
. Следовательно, 
Деление отрезка в заданном отношении
Пусть в пространственной декартовой системе отсчета даны две точки  и
и  Требуется найти на заданном отрезке
Требуется найти на заданном отрезке  такую точку
такую точку  чтобы
чтобы  где
где  — заданное число (Рис. 8).
— заданное число (Рис. 8). 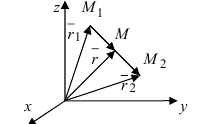
Рис. 8. Деление отрезка в заданном отношении.
Из рисунка видно, что В силу того, что
В силу того, что  Подставляя это равенство в систему и исключая вектор
Подставляя это равенство в систему и исключая вектор  найдем, что
найдем, что  .
.
Отсюда найдем вектор  В проекциях на координатные оси это равенство равносильно системе равенств
В проекциях на координатные оси это равенство равносильно системе равенств  которая определяет деление отрезка в заданном отношении. Если точка
которая определяет деление отрезка в заданном отношении. Если точка  делит отрезок
делит отрезок  пополам
пополам  то система полученных равенств принимает вид известный из курса математики средней школы
то система полученных равенств принимает вид известный из курса математики средней школы 
Понятие базиса векторов
Определение: Любые два (три) неколлинеарных (некомпланарных) вектора образуют базис.
Теорема: Пусть даны два неколлинеарных вектора  и
и  . Любой другой компланарный им вектор может быть единственным образом представлен в виде линейной комбинации векторов и
. Любой другой компланарный им вектор может быть единственным образом представлен в виде линейной комбинации векторов и  :
:  , где
, где  и
и  — вещественные числа.
— вещественные числа.
Доказательство: Пусть векторы  ,
,  и
и  приведены к общему началу (Рис. 9), т.е.
приведены к общему началу (Рис. 9), т.е.
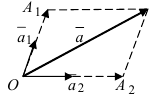
Рис. 9. Разложение вектора по заданному базису.
Из рисунка видно, что  (правило параллелограмма, Лекция .№ 4). Вектор
(правило параллелограмма, Лекция .№ 4). Вектор  коллинеарен вектору
коллинеарен вектору  а вектор
а вектор  вектору
вектору  Следовательно, найдутся 2 вещественных числа
Следовательно, найдутся 2 вещественных числа  такие, что будут выполняться равенства:
такие, что будут выполняться равенства:  Отсюда следует, что
Отсюда следует, что 
Докажем единственность разложения вектора  по базису
по базису  Пусть существуют другие вещественные числа
Пусть существуют другие вещественные числа  такие что
такие что  и пусть хотя бы одна из пар
и пусть хотя бы одна из пар  содержит разные числа, например,
содержит разные числа, например,  Вычитая из первого разложения второе, получим
Вычитая из первого разложения второе, получим

Это означает, что векторы  коллинеарные, что противоречит условию теоремы о том, что они образуют базис. Таким образом, разложение вектора
коллинеарные, что противоречит условию теоремы о том, что они образуют базис. Таким образом, разложение вектора  по базису
по базису  единственно и имеет ВИД
единственно и имеет ВИД  В силу произвольности вектора данная теорема справедлива для любого вектора компланарного с векторами
В силу произвольности вектора данная теорема справедлива для любого вектора компланарного с векторами 
Замечание: С геометрической точки зрения числа  определяют те числа, на которые надо умножить базисные вектора
определяют те числа, на которые надо умножить базисные вектора  чтобы по правилу параллелограмма получить вектор
чтобы по правилу параллелограмма получить вектор  В трехмерном пространстве произвольный вектор
В трехмерном пространстве произвольный вектор  может быть разложен по некомпланарной тройке векторов
может быть разложен по некомпланарной тройке векторов 
 причем единственным образом.
причем единственным образом.
Определение: Ортом направления оси  называется вектор единичной длины в выбранном масштабе измерения, сонаправленный с этой осью
называется вектор единичной длины в выбранном масштабе измерения, сонаправленный с этой осью  Рассмотрим пространственную декартову систему координат, по всем осям (абсцисс — Ох, ординат — Оу и аппликат — Oz) выберем одинаковый масштаб измерения. Вдоль направления каждой оси отложим отрезки единичной длины. Обозначим орты осей:
Рассмотрим пространственную декартову систему координат, по всем осям (абсцисс — Ох, ординат — Оу и аппликат — Oz) выберем одинаковый масштаб измерения. Вдоль направления каждой оси отложим отрезки единичной длины. Обозначим орты осей: — через
— через — через
— через  — через
— через  (Рис. 10):
(Рис. 10): 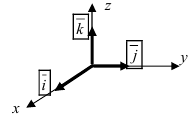
Рис. 10. Орты (единичные векторы) декартовой системы координат.
Из Рис. 10 видно, что орты осей имеют следующие проекции:

Так как векторы  некомпланарные, то они образуют базис и любой пространственный вектор может быть единственным образом разложен по этому базису, причем в качестве чисел
некомпланарные, то они образуют базис и любой пространственный вектор может быть единственным образом разложен по этому базису, причем в качестве чисел  выступают проекции вектора:
выступают проекции вектора: 
Векторы в геометрии
Изучая материал этого параграфа, вы узнаете, что векторы используются не только в физике, но и в геометрии. Вы научитесь складывать и вычитать векторы, умножать вектор на число, находить угол между двумя векторами, применять свойства векторов для решения задач.
Понятие вектора в геометрии
Вы знаете много величин, которые определяются своими числовыми значениями: масса, площадь, длина, объем, время, температура и т. д. Такие величины называют скалярными величинами или скалярами.
Из курса физики вам знакомы величины, для задания которых недостаточно знать только их числовое значение. Например, если на пружину действует сила 5  то непонятно, будет ли пружина сжиматься или растягиваться (рис. 12.1). Надо еще знать, в каком направлении действует сила.
то непонятно, будет ли пружина сжиматься или растягиваться (рис. 12.1). Надо еще знать, в каком направлении действует сила.
Величины, которые определяются не только числовым значением, но и направлением, называют векторными величинами или векторами.
Сила, перемещение, скорость, ускорение, вес — примеры векторных величин.
Есть векторы и в геометрии.
Рассмотрим отрезок  Если мы договоримся точку
Если мы договоримся точку  считать началом отрезка, а точку
считать началом отрезка, а точку  — его концом, то такой отрезок будет характеризоваться не только длиной, но и направлением от точки
— его концом, то такой отрезок будет характеризоваться не только длиной, но и направлением от точки  к точке
к точке 
Если указано, какая точка является началом отрезка, а какая точка — его концом, то такой отрезок называют направленным отрезком или вектором.
Вектор с началом в точке  и концом в точке
и концом в точке  обозначают так:
обозначают так:  (читают: «вектор
(читают: «вектор 
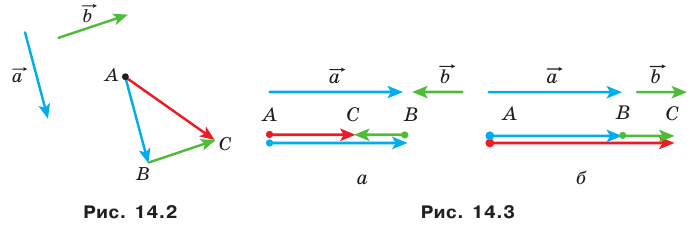
На рисунках вектор изображают отрезком со стрелкой, указывающей его конец. На рисунке 12.2 изображены векторы 
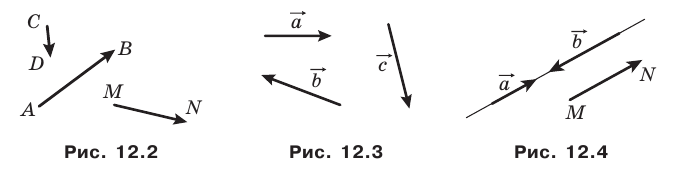 Для обозначения векторов также используют строчные буквы латинского алфавита со стрелкой сверху. На рисунке 12.3 изображены векторы
Для обозначения векторов также используют строчные буквы латинского алфавита со стрелкой сверху. На рисунке 12.3 изображены векторы 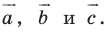
Вектор, у которого начало и конец — одна и та же точка, называют нулевым вектором или нуль-вектором и обозначают  Если начало и конец нулевого вектора — это точка
Если начало и конец нулевого вектора — это точка  то его можно обозначить и так:
то его можно обозначить и так:  На рисунке нулевой вектор изображают точкой.
На рисунке нулевой вектор изображают точкой.
Модулем вектора  называют длину отрезка
называют длину отрезка  Модуль вектора
Модуль вектора  обозначают так:
обозначают так:  а модуль вектора
а модуль вектора  — так:
— так: 
Модуль нулевого вектора считают равным нулю: 
Определение. Ненулевые векторы называют коллинеарными, если они лежат на параллельных прямых или на одной прямой.
Нулевой вектор считают коллинеарным любому вектору.
На рисунке 12.4 изображены коллинеарные векторы  и
и 
Тот факт, что векторы  коллинеарны, обозначают так:
коллинеарны, обозначают так: 
На рисунке 12.5 ненулевые коллинеарные векторы  одинаково направлены. Такие векторы называют сонаправленными и пишут:
одинаково направлены. Такие векторы называют сонаправленными и пишут: 
Если 
Аналогичным свойством обладают и сонаправленные векторы, то есть если  (рис. 12.6).
(рис. 12.6).
На рисунке 12.7 ненулевые коллинеарные векторы  противоположно направлены. Этот факт обозначают так:
противоположно направлены. Этот факт обозначают так: 
Определение. Ненулевые векторы называют равными, если их модули равны и они сонаправлены. Любые два нулевых вектора равны.
На рисунке 12.8 изображены равные векторы  Это обозначают так:
Это обозначают так: 
Равенство ненулевых векторов  означает, что
означает, что  и
и 
Нетрудно доказать, что если  Убедитесь в этом самостоятельно.
Убедитесь в этом самостоятельно.
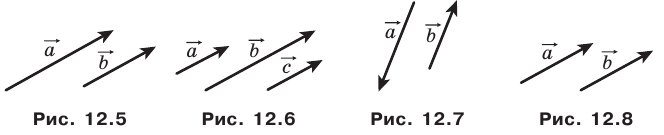
Часто, говоря о векторах, мы не конкретизируем, какая точка является началом вектора. Так, на рисунке 12.9 изображены вектор а и векторы, равные вектору  Каждый из них также принято называть вектором
Каждый из них также принято называть вектором 
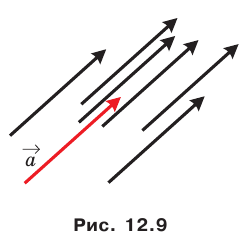
На рисунке 12.10, а изображены вектор  и точка
и точка  Если построен вектор
Если построен вектор  равный вектору
равный вектору  то говорят, что вектор
то говорят, что вектор  отложен от точки
отложен от точки  (рис. 12.10, б).
(рис. 12.10, б).
Покажем, как от произвольной точки  отложить вектор, равный данному вектору
отложить вектор, равный данному вектору 
Если вектор  нулевой, то искомым вектором будет вектор
нулевой, то искомым вектором будет вектор 
Теперь рассмотрим случай, когда  Пусть точка
Пусть точка  лежит на прямой, содержащей вектор
лежит на прямой, содержащей вектор  (рис. 12.11). На этой прямой существуют две точки
(рис. 12.11). На этой прямой существуют две точки  такие, что
такие, что  На указанном рисунке вектор
На указанном рисунке вектор  будет равным вектору
будет равным вектору  Его и следует выбрать.
Его и следует выбрать.
Если точка  не принадлежит прямой, содержащей вектор
не принадлежит прямой, содержащей вектор  то через точку
то через точку  проведем прямую, ей параллельную (рис. 12.12). Дальнейшее построение аналогично уже рассмотренному.
проведем прямую, ей параллельную (рис. 12.12). Дальнейшее построение аналогично уже рассмотренному.
От заданной точки можно отложить только один вектор, равный данному.
Пример №5
Дан четырехугольник  Известно, что
Известно, что  и
и  Определите вид четырехугольника
Определите вид четырехугольника 
Решение:
Из условия  следует, что
следует, что  Следовательно, четырехугольник
Следовательно, четырехугольник  — параллелограмм.
— параллелограмм.
Равенство  означает, что диагонали четырехугольника
означает, что диагонали четырехугольника  равны. А параллелограмм с равными диагоналями — прямоугольник.
равны. А параллелограмм с равными диагоналями — прямоугольник. 
Координаты вектора
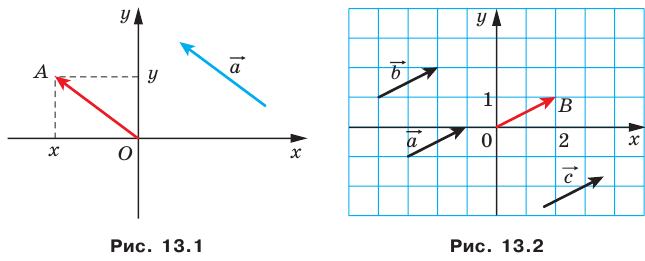
Рассмотрим на координатной плоскости вектор  Отложим от начала координат равный ему вектор
Отложим от начала координат равный ему вектор  (рис. 13.1). Координатами вектора
(рис. 13.1). Координатами вектора  называют координаты точки
называют координаты точки  Запись
Запись  означает, что вектор
означает, что вектор  имеет координаты
имеет координаты 
Числа  называют соответственно первой и второй координатами вектора
называют соответственно первой и второй координатами вектора 
Из определения следует, что равные векторы имеют равные соответствующие координаты. Например, каждый из равных векторов  (рис. 13.2) имеет координаты
(рис. 13.2) имеет координаты 
Справедливо и обратное утверждение: если соответствующие координаты векторов равны, то равны и сами векторы.
Действительно, если отложить такие векторы от начала координат, то их концы совпадут.
Очевидно, что нулевой вектор имеет координаты 
Теорема 13.1. Если точки  соответственно являются началом и концом вектора
соответственно являются началом и концом вектора  то числа
то числа  и
и  равны соответственно первой и второй координатам вектора
равны соответственно первой и второй координатам вектора 
Доказательство: Пусть вектор  равный вектору
равный вектору  имеет координаты
имеет координаты  Докажем, что
Докажем, что 
Если  то утверждение теоремы очевидно.
то утверждение теоремы очевидно.
Пусть  Отложим от начала координат вектор
Отложим от начала координат вектор  равный вектору
равный вектору  Тогда координаты точки
Тогда координаты точки  равны
равны 
Поскольку  то, воспользовавшись результатом задачи 12.32, можем сделать вывод, что середины отрезков
то, воспользовавшись результатом задачи 12.32, можем сделать вывод, что середины отрезков  совпадают. Координаты середин отрезков
совпадают. Координаты середин отрезков  соответственно равны
соответственно равны  Тогда
Тогда

Эти равенства выполняются и тогда, когда точка  совпадает с точкой
совпадает с точкой  или точка
или точка  совпадает с точкой
совпадает с точкой 
Отсюда 
Из формулы расстояния между двумя точками следует, что если вектор  имеет координаты
имеет координаты  то
то
Пример №6
Даны координаты трех вершин параллелограмма 
 Найдите координаты вершины
Найдите координаты вершины 
Решение:
Поскольку четырехугольник  — параллелограмм, то
— параллелограмм, то  Следовательно, координаты этих векторов равны.
Следовательно, координаты этих векторов равны.
Пусть координаты точки  равны
равны  Для нахождения координат векторов
Для нахождения координат векторов  воспользуемся теоремой 13.1.
воспользуемся теоремой 13.1.
Имеем:

Отсюда: 
Ответ: 
Сложение и вычитание векторов
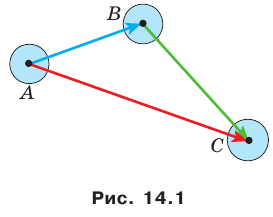
Если тело переместилось из точки  в точку
в точку  а затем из точки
а затем из точки  в точку
в точку  то суммарное перемещение из точки
то суммарное перемещение из точки  в точку
в точку  естественно представить в виде вектора
естественно представить в виде вектора  считая этот вектор суммой векторов
считая этот вектор суммой векторов  то есть
то есть  (рис. 14.1).
(рис. 14.1).
Этот пример подсказывает, как ввести понятие суммы векторов, то есть как сложить два данных вектора  и
и 
Отложим от произвольной точки  вектор
вектор  равный вектору
равный вектору  Далее от точки
Далее от точки  отложим вектор
отложим вектор  равный вектору
равный вектору  Вектор
Вектор  называют суммой векторов
называют суммой векторов  (рис. 14.2) и записывают:
(рис. 14.2) и записывают: 
Описанный алгоритм сложения двух векторов называют правилом треугольника.
Это название связано с тем, что если векторы  не коллинеарны, то точки
не коллинеарны, то точки  являются вершинами треугольника (рис. 14.2).
являются вершинами треугольника (рис. 14.2).
По правилу треугольника можно складывать и коллинеарные векторы. На рисунке 14.3 вектор  равен сумме коллинеарных векторов
равен сумме коллинеарных векторов 
Следовательно, для любых трех точек  выполняется равенство
выполняется равенство  которое выражает правило треугольника для сложения векторов.
которое выражает правило треугольника для сложения векторов.
Теорема 14.1. Если координаты векторов  соответственно равны
соответственно равны  то координаты вектора
то координаты вектора  равны
равны 
Доказательство: Пусть точки  таковы, что
таковы, что  Имеем:
Имеем: 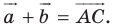 Докажем, что координаты вектора
Докажем, что координаты вектора  равны
равны 
Найдем координаты векторов 

Имеем:

С учетом того, что  получаем:
получаем: 
Замечание. Описывая правило треугольника для нахождения суммы векторов  мы отложили вектор
мы отложили вектор  от произвольной точки. Если точку
от произвольной точки. Если точку  заменить точкой
заменить точкой  то вместо вектора
то вместо вектора  равного сумме векторов
равного сумме векторов  получим некоторый вектор
получим некоторый вектор  Из теоремы 14.1 следует, что координаты векторов
Из теоремы 14.1 следует, что координаты векторов 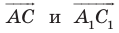 равны
равны  следовательно,
следовательно,  Это означает, что сумма векторов
Это означает, что сумма векторов  не зависит от того, от какой точки отложен вектор
не зависит от того, от какой точки отложен вектор  Свойства сложения векторов аналогичны свойствам сложения чисел.
Свойства сложения векторов аналогичны свойствам сложения чисел.
Для любых векторов  выполняются равенства:
выполняются равенства:
Для доказательства этих свойств достаточно сравнить соответствующие координаты векторов, записанных в правой и левой частях равенств. Сделайте это самостоятельно.
Сумму трех и более векторов находят так: сначала складывают первый и второй векторы, затем складывают полученный вектор с третьим и т. д. Например, 
Из переместительного и сочетательного свойств сложения векторов следует, что при сложении нескольких векторов можно менять местами слагаемые и расставлять скобки любым способом.
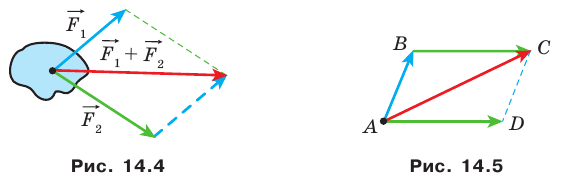
В физике часто приходится складывать векторы, отложенные от одной точки. Так, если к телу приложены силы  (рис. 14.4), то равнодействующая этих сил равна сумме
(рис. 14.4), то равнодействующая этих сил равна сумме 
Для нахождения суммы двух неколлинеарных векторов, отложенных от одной точки, удобно пользоваться правилом параллелограмма для сложения векторов.
 Пусть надо найти сумму неколлинеарных векторов
Пусть надо найти сумму неколлинеарных векторов 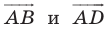 (рис. 14.5). Отложим вектор
(рис. 14.5). Отложим вектор  равный вектору
равный вектору  Тогда
Тогда  Поскольку векторы
Поскольку векторы  равны, то четырехугольник
равны, то четырехугольник  — параллелограмм с диагональю
— параллелограмм с диагональю 
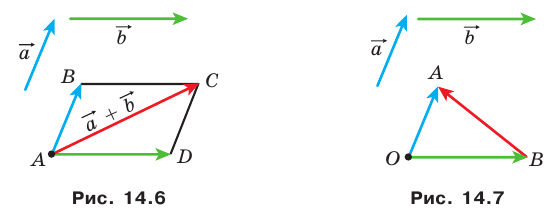
Приведенные соображения позволяют сформулировать правило параллелограмма для сложения неколлинеарных векторов 
Отложим от произвольной точки  вектор
вектор  равный вектору
равный вектору  и вектор
и вектор  равный вектору
равный вектору  Построим параллелограмм
Построим параллелограмм  (рис. 14.6). Тогда искомая сумма
(рис. 14.6). Тогда искомая сумма  равна вектору
равна вектору 
Определение. Разностью векторов  называют такой вектор
называют такой вектор  сумма которого с вектором
сумма которого с вектором  равна вектору
равна вектору 
Пишут: 
Покажем, как построить вектор, равный разности данных векторов 
От произвольной точки  отложим векторы
отложим векторы  соответственно равные векторам
соответственно равные векторам  (рис. 14.7). Тогда вектор
(рис. 14.7). Тогда вектор  равен разности
равен разности  Действительно,
Действительно,  Следовательно, по определению разности двух векторов
Следовательно, по определению разности двух векторов  то есть
то есть 
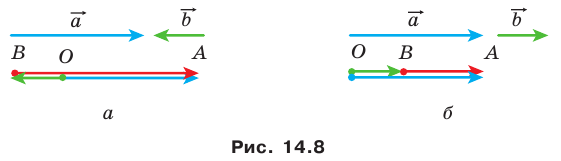
На рисунке 14.7 векторы  неколлинеарны. Однако описанный алгоритм применим и для нахождения разности кол-линеарных векторов. На рисунке 14.8 вектор
неколлинеарны. Однако описанный алгоритм применим и для нахождения разности кол-линеарных векторов. На рисунке 14.8 вектор  равен разности коллинеарных векторов
равен разности коллинеарных векторов 
 Следовательно, для любых трех точек
Следовательно, для любых трех точек  выполняется равенство
выполняется равенство  которое выражает правило нахождения разности двух векторов, отложенных от одной точки.
которое выражает правило нахождения разности двух векторов, отложенных от одной точки.
Теорема 14.2. Если координаты векторов  соответственно равны
соответственно равны  то координаты вектора
то координаты вектора  равны
равны 
Докажите эту теорему самостоятельно.
Из теоремы 14.2 следует, что для любых векторов  существует единственный вектор
существует единственный вектор  такой, что
такой, что 
Определение. Два ненулевых вектора называют противоположными, если их модули равны и векторы противоположно направлены.
Если векторы  противоположны, то говорят, что вектор
противоположны, то говорят, что вектор  противоположный вектору
противоположный вектору  а вектор
а вектор  противоположный вектору
противоположный вектору 
Вектором, противоположным нулевому вектору, считают нулевой вектор.
Вектор, противоположный вектору  обозначают так:
обозначают так: 
Из определения следует, что противоположным вектору  является вектор
является вектор  Тогда для любых точек
Тогда для любых точек  выполняется равенство
выполняется равенство 
Из правила треугольника следует, что
А из этого равенства следует, что если вектор  имеет координаты
имеет координаты  то вектор
то вектор  имеет координаты
имеет координаты 
Теорема 14.3. Для любых векторов  выполняется равенство
выполняется равенство 
Для доказательства достаточно сравнить соответствующие координаты векторов, записанных в правой и левой частях равенства. Сделайте это самостоятельно.
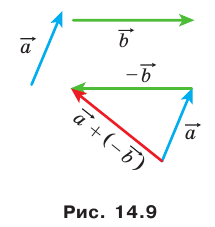
Теорема 14.3 позволяет свести вычитание векторов к сложению: чтобы из вектора  вычесть вектор
вычесть вектор  можно к вектору
можно к вектору  прибавить вектор
прибавить вектор  (рис. 14.9).
(рис. 14.9).
Пример №7
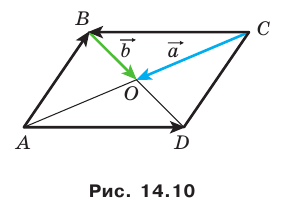
Диагонали параллелограмма  пересекаются в точке
пересекаются в точке  (рис. 14.10). Выразите векторы
(рис. 14.10). Выразите векторы  и
и  через векторы
через векторы 
Решение:
Поскольку точка  — середина отрезков
— середина отрезков  и
и 
Имеем:
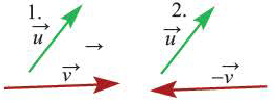
Умножение вектора на число
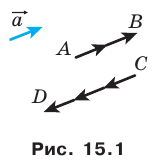
Пусть дан ненулевой вектор  На рисунке 15.1 изображены вектор
На рисунке 15.1 изображены вектор  равный вектору
равный вектору  и вектор
и вектор  равный вектору
равный вектору  Очевидно, что
Очевидно, что 
Вектор  обозначают
обозначают  и считают, что он получен в результате умножения вектора
и считают, что он получен в результате умножения вектора  на число 2. Аналогично считают, что вектор
на число 2. Аналогично считают, что вектор  получен в результате умножения вектора
получен в результате умножения вектора  на число -3, и записывают:
на число -3, и записывают: 
Этот пример подсказывает, как ввести понятие «умножение вектора на число».
Определение. Произведением ненулевого вектора  и числа
и числа  отличного от нуля, называют такой вектор
отличного от нуля, называют такой вектор  что:
что:
2) если  если
если 
Пишут: 
Если  то считают, что
то считают, что 
На рисунке 15.2 изображены векторы 
Из определения следует, что
Также из определения следует, что если  то векторы
то векторы  коллинеарны.
коллинеарны.
А если векторы  коллинеарны, то можно ли представить вектор
коллинеарны, то можно ли представить вектор  в виде произведения
в виде произведения  Ответ дает следующая теорема.
Ответ дает следующая теорема.
Теорема 15.1. Если векторы  коллинеарны и
коллинеарны и  то существует такое число
то существует такое число  что
что 
Доказательство: Если  то при
то при  получаем, что
получаем, что  Если
Если  то или
то или 
1) Пусть  Рассмотрим вектор
Рассмотрим вектор  Поскольку
Поскольку  следовательно,
следовательно,  Кроме того,
Кроме того,  Таким образом, векторы
Таким образом, векторы  сонаправлены и их модули равны. Отсюда
сонаправлены и их модули равны. Отсюда 
2) Пусть  Рассмотрим вектор
Рассмотрим вектор  Для этого случая завершите доказательство самостоятельно.
Для этого случая завершите доказательство самостоятельно. 
Теорема 15.2. Если вектор  имеет координаты
имеет координаты  то вектор
то вектор  имеет координаты
имеет координаты 
Доказательство: Если  то утверждение теоремы очевидно.
то утверждение теоремы очевидно.
Пусть  Рассмотрим вектор
Рассмотрим вектор  . Покажем, что
. Покажем, что  Имеем:
Имеем:

Отложим от начала координат векторы  равные соответственно векторам
равные соответственно векторам  Поскольку прямая
Поскольку прямая  проходит через начало координат, то ее уравнение имеет вид
проходит через начало координат, то ее уравнение имеет вид  Этой прямой принадлежит точка
Этой прямой принадлежит точка  Тогда
Тогда  Отсюда
Отсюда 
Следовательно, точка  также принадлежит прямой
также принадлежит прямой  поэтому векторы
поэтому векторы  коллинеарны, то есть
коллинеарны, то есть 
При  числа
числа  имеют одинаковые знаки (или оба равны нулю). Таким же свойством обладают числа
имеют одинаковые знаки (или оба равны нулю). Таким же свойством обладают числа  Следовательно, при
Следовательно, при  точки
точки  лежат в одной координатной четверти (или на одном координатном луче), поэтому векторы
лежат в одной координатной четверти (или на одном координатном луче), поэтому векторы  сонаправлены (рис. 15.3), то есть
сонаправлены (рис. 15.3), то есть  При
При  векторы
векторы  будут противоположно направленными, то есть
будут противоположно направленными, то есть  Следовательно, мы получили, что
Следовательно, мы получили, что 
Следствие 1. Векторы  коллинеарны.
коллинеарны.
Следствие 2. Если векторы  коллинеарны, причем
коллинеарны, причем  то существует такое число
то существует такое число 

С помощью теоремы 15.2 можно доказать такие свойства умножения вектора на число.
Для любых чисел  и любых векторов
и любых векторов  выполняются равенства:
выполняются равенства:
Для доказательства этих свойств достаточно сравнить соответствующие координаты векторов, записанных в правых и левых частях равенств. Сделайте это самостоятельно.
Эти свойства позволяют преобразовывать выражения, содержащие сумму векторов, разность векторов и произведение векторов на число, аналогично тому, как мы преобразовываем алгебраические выражения. Например,

Пример №8
Докажите, что если  то точки
то точки  и
и  лежат на одной прямой.
лежат на одной прямой.
Решение:
Из условия следует, что векторы  коллинеарны. Кроме того, эти векторы отложены от одной точки
коллинеарны. Кроме того, эти векторы отложены от одной точки  Следовательно, точки
Следовательно, точки  лежат на одной прямой.
лежат на одной прямой. 
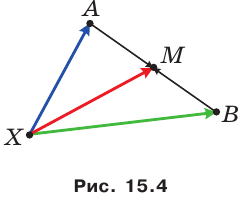
Пример №9
Точка  — середина отрезка
— середина отрезка  — произвольная точка (рис. 15.4). Докажите, что
— произвольная точка (рис. 15.4). Докажите, что 
Решение:
Применяя правило треугольника, запишем:
Сложим эти два равенства:

Поскольку векторы  противоположны, то
противоположны, то  Имеем:
Имеем: 
Отсюда 
Пример №10
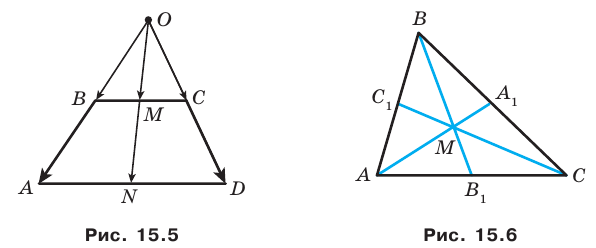
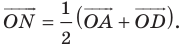
Докажите, что середины оснований трапеции и точка пересечения продолжение ее боковых сторон лежат на одной прямой.
Решение:
Пусть точки  — середины оснований
— середины оснований  и
и  трапеции
трапеции  — точка пересечения прямых
— точка пересечения прямых  (рис. 15.5).
(рис. 15.5).
Применяя ключевую задачу 2, запишем: 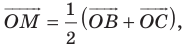
Поскольку  где
где  —некоторые числа.
—некоторые числа.
Поскольку  Следовательно,
Следовательно, 
Имеем: 
Из ключевой задачи 1 следует, что точки  лежат на одной прямой.
лежат на одной прямой. 
Пример №11
Докажите, что если  — точка пересечения медиан треугольника
— точка пересечения медиан треугольника  то
то 
Решение:
Пусть отрезки  — медианы треугольника
— медианы треугольника  (рис. 15.6). Имеем:
(рис. 15.6). Имеем:
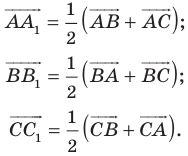
Отсюда 
Из свойства медиан треугольника следует, что 
Тогда  Аналогично
Аналогично 
Отсюда

Применение векторов
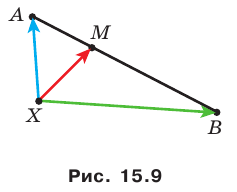
Применяя векторы к решению задач, часто используют следующую лемму.
Лемма. Пусть  — такая точка отрезка
— такая точка отрезка  что
что  (рис. 15.9). Тогда для любой точки
(рис. 15.9). Тогда для любой точки  выполняется равенство
выполняется равенство

Доказательство: Имеем:

Поскольку  то
то
Запишем: 
Поскольку  то имеем:
то имеем:
Заметим, что эта лемма является обобщением ключевой задачи 2 п. 15.
Пример №12
Пусть  — точка пересечения медиан треугольника
— точка пересечения медиан треугольника  — произвольная точка (рис. 15.10). Докажите, что
— произвольная точка (рис. 15.10). Докажите, что

Решение:
Пусть точка  — середина отрезка
— середина отрезка  Имеем:
Имеем:  Тогда, используя лемму, можно записать:
Тогда, используя лемму, можно записать:

Докажем векторное равенство, связывающее две замечательные точки треугольника.
точки треугольника.
Теорема. Если точка  — ортоцентр треугольника
— ортоцентр треугольника  а точка
а точка  — центр его описанной окружности, то
— центр его описанной окружности, то

Доказательство: Для прямоугольного треугольника равенство  очевидно.
очевидно.
Пусть треугольник  не является прямоугольным. Опустим из точки
не является прямоугольным. Опустим из точки  перпендикуляр
перпендикуляр  на сторону
на сторону  треугольника
треугольника  (рис. 15.11). В курсе геометрии 8 класса было доказано, что
(рис. 15.11). В курсе геометрии 8 класса было доказано, что 
На луче  отметим точку
отметим точку  такую, что
такую, что  Тогда
Тогда  Поскольку
Поскольку  то четырехугольник
то четырехугольник  — параллелограмм.
— параллелограмм.
По правилу параллелограмма 
Поскольку точка  является серединой отрезка
является серединой отрезка  то в четырехугольнике
то в четырехугольнике  диагонали точкой пересечения делятся пополам.
диагонали точкой пересечения делятся пополам. 
Следовательно, этот четырехугольник — параллелограмм. Отсюда 
Имеем: 
Обратимся к векторному равенству  где
где  — точка пересечения медиан треугольника
— точка пересечения медиан треугольника  Так как
Так как  — произвольная точка, то равенство остается справедливым, если в качестве точки
— произвольная точка, то равенство остается справедливым, если в качестве точки  выбрать точку
выбрать точку  — центр описанной окружности треугольника
— центр описанной окружности треугольника 
Имеем: 
Учитывая равенство  получаем:
получаем: 
Это равенство означает, что точки  лежат на одной прямой, которую называют прямой Эйлера. Напомним, что это замечательное свойство было доказано в курсе геометрии 8 класса, но другим способом.
лежат на одной прямой, которую называют прямой Эйлера. Напомним, что это замечательное свойство было доказано в курсе геометрии 8 класса, но другим способом.
Скалярное произведение векторов
Пусть  — два ненулевых и несонаправленных вектора (рис. 16.1). От произвольной точки
— два ненулевых и несонаправленных вектора (рис. 16.1). От произвольной точки  отложим векторы
отложим векторы  соответственно равные векторам
соответственно равные векторам  Величину угла
Величину угла  будем называть углом между векторами
будем называть углом между векторами  и
и 
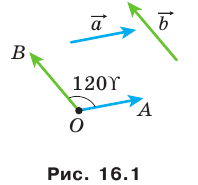
Угол между векторами  обозначают так:
обозначают так:  Например, на рисунке 16.1
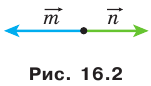
Например, на рисунке 16.1  а на рисунке 16.2
а на рисунке 16.2 
Если векторы  сонаправлены, то считают, что
сонаправлены, то считают, что  Если хотя бы один из векторов
Если хотя бы один из векторов  нулевой, то так же считают, что
нулевой, то так же считают, что 
Следовательно, для любых векторов  имеет место неравенство:
имеет место неравенство:

Векторы  называют перпендикулярными, если угол между ними равен
называют перпендикулярными, если угол между ними равен  Пишут:
Пишут: 
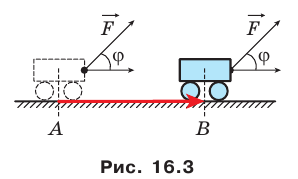
Вы умеете складывать и вычитать векторы, умножать вектор на число. Также из курса физики вы знаете, что если под действием постоянной силы  тело переместилось из точки
тело переместилось из точки  в точку
в точку  (рис. 16.3), то совершенная механическая работа равна
(рис. 16.3), то совершенная механическая работа равна  где
где 
Изложенное выше подсказывает, что целесообразно ввести еще одно действие над векторами.
Определение. Скалярным произведением двух векторов называют произведение их модулей и косинуса угла между ними. Скалярное произведение векторов  обозначают так:
обозначают так: 
Имеем:
Если хотя бы один из векторов  нулевой, то очевидно, что
нулевой, то очевидно, что 
Пусть 
Скалярное произведение  называют скалярным квадратом вектора
называют скалярным квадратом вектора  и обозначают
и обозначают 
Мы получили, что  то есть скалярный квадрат, вектора равен квадрату его модуля.
то есть скалярный квадрат, вектора равен квадрату его модуля.
Теорема 16.1. Скалярное произведение двух ненулевых векторов равно нулю тогда и только тогда, когда эти векторы перпендикулярны.
Доказательство: Пусть  Докажем, что
Докажем, что 
Имеем:  Отсюда
Отсюда 
Пусть теперь  Докажем, что
Докажем, что 
Запишем:  Поскольку
Поскольку 
 Отсюда
Отсюда 
Теорема 16.2. Скалярное произведение векторов  можно вычислить по формуле
можно вычислить по формуле
Доказательство: Сначала рассмотрим случай, когда векторы  и
и  неколлинеарны.
неколлинеарны.
Отложим от начала координат векторы  соответственно равные векторам
соответственно равные векторам  (рис. 16.4). Тогда
(рис. 16.4). Тогда

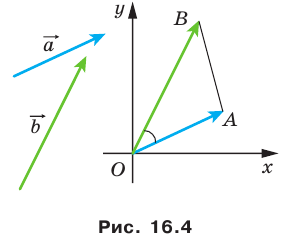
Применим теорему косинусов к треугольнику 

Отсюда 
Поскольку 
Кроме того,  Отсюда
Отсюда 
Имеем:  Воспользовавшись формулой нахождения модуля вектора по его координатам, запишем:
Воспользовавшись формулой нахождения модуля вектора по его координатам, запишем:

Упрощая выражение, записанное в правой части последнего равенства, получаем:
Рассмотрим случай, когда векторы  коллинеарны.
коллинеарны.
Если  то очевидно, что
то очевидно, что 
Если  то существует такое число
то существует такое число  то есть
то есть 
Если  Имеем:
Имеем:

Случай, когда  рассмотрите самостоятельно.
рассмотрите самостоятельно. 
Следствие. Косинус угла между ненулевыми векторами  можно вычислить по формуле
можно вычислить по формуле
Доказательство: Из определения скалярного произведения векторов  следует, что
следует, что  Воспользовавшись теоремой 16.2 и формулой нахождения модуля вектора по его координатам, получаем формулу
Воспользовавшись теоремой 16.2 и формулой нахождения модуля вектора по его координатам, получаем формулу 
С помощью теоремы 16.2 легко доказать следующие свойства скалярного произведения векторов.
Для любых векторов  и любого числа
и любого числа  справедливы равенства:
справедливы равенства:
 — переместительное свойство;
— переместительное свойство;
 — сочетательное свойство;
— сочетательное свойство;
 — распределительное свойство.
— распределительное свойство.
Для доказательства этих свойств достаточно выразить через координаты векторов скалярные произведения, записанные в правых и левых частях равенств, и сравнить их. Сделайте это самостоятельно.
Эти свойства вместе со свойствами сложения векторов и умножения вектора на число позволяют преобразовывать выражения, содержащие скалярное произведение векторов, аналогично тому, как мы преобразовываем алгебраические выражения.
Например, 

Пример №13
С помощью векторов докажите, что диагонали ромба перпендикулярны.
Решение:
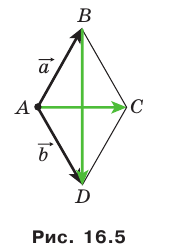
На рисунке 16.5 изображен ромб  Пусть
Пусть  Очевидно, что
Очевидно, что  По правилу параллелограмма имеем:
По правилу параллелограмма имеем: 
Отсюда

Следовательно, 
Пример №14
Известно, что 
Найдите 
Решение:
Поскольку скалярный квадрат вектора равен квадрату его модуля, то  Отсюда
Отсюда
Ответ: 
Пример №15
В треугольнике  известно, что
известно, что  Найдите медиану
Найдите медиану 
Решение. Применяя ключевую задачу 2 п. 15, запишем:  (рис. 16.6).
(рис. 16.6).
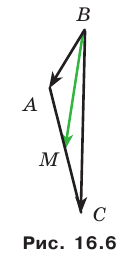
Отсюда:
Следовательно, 
Ответ: 
Справочный материал
Вектор
Если указано, какая точка является началом отрезка, а какая точка — его концом, то такой отрезок называют направленным отрезком или вектором.
Коллинеарные векторы
Ненулевые векторы называют коллинеарными, если они лежат на параллельных прямых или на одной прямой. Нулевой вектор считают коллинеарным любому вектору.
Равные векторы
Ненулевые векторы называют равными, если их модули равны и они сонаправлены. Любые два нулевых вектора равны. Равные векторы имеют равные соответствующие координаты. Если соответствующие координаты векторов равны, то равны и сами векторы.
Координаты вектора
Если точки  соответственно являются началом и концом вектора
соответственно являются началом и концом вектора  то числа
то числа  равны соответственно первой и второй координатам вектора
равны соответственно первой и второй координатам вектора 
Модуль вектора
Если вектор  имеет координаты
имеет координаты 
Правила сложения двух векторов
Правило треугольника
Отложим от произвольной точки  вектор
вектор  равный вектору
равный вектору  а от точки
а от точки  — вектор
— вектор  равный вектору
равный вектору  Вектор
Вектор  — сумма векторов
— сумма векторов  Для любых трех точек
Для любых трех точек  выполняется равенство
выполняется равенство 
Правило параллелограмма
Отложим от произвольной точки  вектор
вектор  равный вектору
равный вектору  и вектор
и вектор  равный вектору
равный вектору  Построим параллелограмм
Построим параллелограмм  Тогда вектор
Тогда вектор  — сумма векторов
— сумма векторов 
Координаты суммы векторов
Если координаты векторов  соответственно равны
соответственно равны  и
и  то координаты вектора
то координаты вектора  равны
равны 
Свойства сложения векторов
Для любых векторов  выполняются равенства:
выполняются равенства:
Разность векторов
Разностью векторов  называют такой вектор
называют такой вектор  сумма которого с вектором
сумма которого с вектором  равна вектору
равна вектору 
Для любых трех точек  выполняется равенство
выполняется равенство 
Координаты разности векторов
Если координаты векторов  соответственно равны
соответственно равны  и
и  то координаты вектора
то координаты вектора  равны
равны 
Противоположные векторы
Два ненулевых вектора называют противоположными, если их модули равны и векторы противоположно направлены. Для любых точек  выполняется равенство
выполняется равенство 
Умножение вектора на число
Произведением ненулевого вектора  и числа
и числа  отличного от нуля, называют такой вектор
отличного от нуля, называют такой вектор  что:
что:
2) если 
Если  то считают, что
то считают, что 
Если вектор  имеет координаты
имеет координаты  то вектор
то вектор  имеет координаты
имеет координаты 
Свойства коллинеарных векторов
Если векторы  коллинеарны, причем
коллинеарны, причем  то существует такое число
то существует такое число 
Если векторы  коллинеарны, причем
коллинеарны, причем  то существует такое число
то существует такое число 
Свойства умножения вектора на число
Для любых чисел  и любых векторов
и любых векторов  справедливы равенства:
справедливы равенства:
Скалярное произведение векторов
Скалярным произведением двух векторов называют произведение их модулей и косинуса угла между ними:
 Скалярное произведение векторов
Скалярное произведение векторов  можно вычислить по формуле
можно вычислить по формуле 
Свойства скалярного произведения
Для любых векторов  и любого числа
и любого числа  выполняются равенства:
выполняются равенства:
Условие перпендикулярности двух векторов
Скалярное произведение двух ненулевых векторов равно нулю тогда и только тогда, когда эти векторы перпендикулярны.
Косинус угла между двумя векторами
Косинус угла между ненулевыми векторами  можно вычислить по формуле
можно вычислить по формуле 
Векторы в аналитической геометрии
Понятие вектора широко применяется в экономике, математике, физике и других науках, при этом одинаково широко используется как алгебраическая концепция изложения векторного анализа, так и его геометрическая интерпретация, в рамках которой различаются величины двух видов: скалярные и векторные.
Скалярной величиной или скаляром называется величина, которая полностью определяется одним числом, выражающим отношение этой величины к соответствующей единице измерения, например, цена, количество проданного товара, стоимость и т.д.
Векторной величиной или вектором называется величина, для задания которой кроме численного значения необходимо указать и ее направление в пространстве, например, изменение темпов производства (рост или падение), колебание курса акций на бирже и т.д.
Векторная величина графически обычно изображается как связанный вектор или направленный отрезок, т.е. отрезок прямой, у которого указано, какая из ограничивающих точек является его началом, а какая концом. Но в отличие от направленного отрезка, для описания которого необходимо указать начальную точку, длину и направление, свободный вектор или просто вектор представляет собой множество всех эквивалентных между собой связанных векторов и вполне характеризуется:
- направлением;
- длиной (модулем).
Для задания такого множества достаточно указать какой-либо один из связанных векторов этого множества — представитель вектора, в качестве которого обычно выбирается связанный вектор с началом, совпадающим с началом координат.
Вектор обозначается одной маленькой буквой со стрелкой сверху, например,  или двумя буквами со стрелкой
или двумя буквами со стрелкой  , где точка А есть начало вектора (его точка приложения), а В — его конец.
, где точка А есть начало вектора (его точка приложения), а В — его конец.
Длина вектора называется его модулем, обозначается или
или 
и равна длине любого его представителя, т.е. расстоянию между начальной и конечной точками связного вектора . Вектор, длина которого равна нулю, называется нуль-вектором и обозначается  .
.
Два вектора называются равными, если:
- равны их длины;
- они параллельны;
- они направлены в одну сторону.
Иными словами, равные векторы получаются один из другого параллельным переносом в пространстве.
Векторы называются коллинеарными, если они расположены на одной или на параллельных прямых, и компланарными, если они лежат на одной или на параллельных плоскостях.
Вектор, длина которого равна единице, называется единичным вектором или ортом. Орт обозначатся  .
.
Линейные операции над векторами
Сложение вектора производится по правилу параллелограмма:
Поскольку вектор  равен
равен  , то можно дать другое правило нахождения суммы
, то можно дать другое правило нахождения суммы  (правило треугольника): суммой векторов
(правило треугольника): суммой векторов  является вектор, идущий из начала
является вектор, идущий из начала  в конец если вектор приложен к концу вектора
в конец если вектор приложен к концу вектора  , т.е.:
, т.е.:
 (4-1)
(4-1)
Это правило распространяется на любое число слагаемых: если векторы  образуют ломаную OAB…KL, то суммой этих векторов является вектор
образуют ломаную OAB…KL, то суммой этих векторов является вектор  , замыкающий эту ломаную, т.е.:
, замыкающий эту ломаную, т.е.:
 (4-2)
(4-2)
В частности, если ломаная замыкается, т.е. O = L, то сумма ее звеньев равна нуль-вектору  .
.
Сложение векторов подчиняется обычным законам сложения -сочетательному и переместительному, а также обладает обратной операцией — вычитанием.
Разностью двух векторов , отложенных от одной точки О является вектор, направленный из конца вычитаемого вектора в конец уменьшаемого вектора , т.е.  (Рис. 4.2.). Это правило следует из формулы (1): т.к.
(Рис. 4.2.). Это правило следует из формулы (1): т.к.  .
.
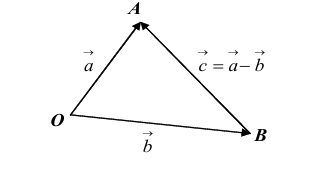 Рис. 4.2.
Рис. 4.2.
Векторы можно не только складывать и вычитать, но и умножать на числа (скаляры).
Вектор  равен
равен  , где
, где  — некоторое число, если:
— некоторое число, если:
- коллинеарен ;
- длина вектора отличается от длины вектора в раз, т.е.
- при направлены в одну сторону, при — в разные.
 коллинеарен
коллинеарен  раз, т.е.
раз, т.е.
 направлены в одну сторону, при
направлены в одну сторону, при  — в разные.
— в разные.Произведение вектора на скаляр обладает следующими свойствами:
Проекция вектора на ось
Пусть даны ось и вектор
и вектор  . Проектируя начало и конец вектора на ось получим на ней вектор
. Проектируя начало и конец вектора на ось получим на ней вектор  . Проекцией
. Проекцией вектора
вектора  на ось называется число, равное длине вектора , взятой со знаком плюс или минус в зависимости от того, направлен ли вектор , в ту же сторону, что и ось (. или в противоположную.
на ось называется число, равное длине вектора , взятой со знаком плюс или минус в зависимости от того, направлен ли вектор , в ту же сторону, что и ось (. или в противоположную.
Проекция вектора на ось (: обозначается ).
Свойства проекций:
- — угол между вектором и осью ;
 — угол между вектором
— угол между вектором  и осью
и осью  ;
;
Пусть — произвольная конечная система векторов;
— произвольная конечная система векторов;  произвольная система действительных чисел.
произвольная система действительных чисел.
Вектор  называется линейной комбинацией векторов этой системы.
называется линейной комбинацией векторов этой системы.
Из свойства проекций следует, что:

Линейная зависимость векторов
Говорят, что векторы линейно независимы, если из равенства:
 (4-3)
(4-3)
следует, что  .
.
В противном случае векторы  , называются линейно зависимыми. Если какой-нибудь вектор можно представить в виде
, называются линейно зависимыми. Если какой-нибудь вектор можно представить в виде  как, то говорят, что вектор
как, то говорят, что вектор  линейно выражается через векторы
линейно выражается через векторы  .
.
Теорема. Векторы  линейно зависимы тогда и только тогда, когда, по крайней мере, один из них линейно выражается через остальные.
линейно зависимы тогда и только тогда, когда, по крайней мере, один из них линейно выражается через остальные.
Следствие. Если векторы линейно независимы, то ни один из них нельзя выразить через остальные; в частности , ни один из них не может быть нулевым.
Система, состоящая из одного вектора, линейно зависима тогда и только тогда, когда этот вектор нулевой. Любые два неколлинеарных вектора  линейно независимы. В самом деле, предположим, неколлинсарные векторы
линейно независимы. В самом деле, предположим, неколлинсарные векторы  линейно зависимы. Тогда, по предыдущей теореме, один из них, например
линейно зависимы. Тогда, по предыдущей теореме, один из них, например ? линейно выражается через второй, т.е.
? линейно выражается через второй, т.е.  , а это противоречит неколлинеарности . Следовательно, — линейно независимы.
, а это противоречит неколлинеарности . Следовательно, — линейно независимы.
Пусть неколлинеарные векторы,  — произвольный вектор компланарный векторам . Отложим векторы
— произвольный вектор компланарный векторам . Отложим векторы  и от одной точки О, т.е. построим
и от одной точки О, т.е. построим (Рис.4.3).
(Рис.4.3).
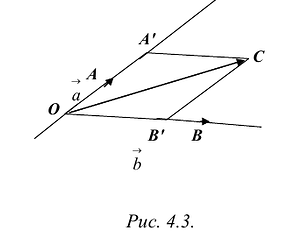
Из параллелограмма  видно, что:
видно, что:

Следовательно, любые три компланарных вектора  линейно зависимы.
линейно зависимы.
Любые три некомпланарных вектора  линейно независимы.
линейно независимы.
Если предположить, что три некомпланарных вектора  линейно зависимы, то один из них, например , линейно выражается через , т.е.
линейно зависимы, то один из них, например , линейно выражается через , т.е.  а это говорит о том, что три вектора
а это говорит о том, что три вектора  лежат в одной плоскости, что противоречит условию.
лежат в одной плоскости, что противоречит условию.
Три вектора линейно зависимы тогда и только тогда, когда определитель, составленный из их координат, равен нулю.
Пусть векторы в некотором базисе имеют координаты
 соответственно. Тогда векторы линейно зависимы тогда и только тогда, когда линейно зависимы их координатные столбцы. Значит, векторы линейно зависимы тогда и только тогда, когда существуют числа
соответственно. Тогда векторы линейно зависимы тогда и только тогда, когда линейно зависимы их координатные столбцы. Значит, векторы линейно зависимы тогда и только тогда, когда существуют числа  , неравные одновременно нулю, что выполняется равенство:
, неравные одновременно нулю, что выполняется равенство:

Линейная зависимость означает, что существует ненулевой набор коэффициентов  такой, что:
такой, что:
 4)
4)
Если один из векторов, например,  ,, является нулевым, то система окажется линейно зависимой, т.к. равенство (4.4) будет выполнено при
,, является нулевым, то система окажется линейно зависимой, т.к. равенство (4.4) будет выполнено при  .
.
Теорема, Векторы линейно зависимы тогда и только тогда, когда один из векторов является линейной комбинацией остальных.
Базис. Координаты вектора в базисе
Определим понятие базиса на прямой, плоскости и в пространстве.
Базисом на прямой называется любой ненулевой вектор на
на
этой прямой. Любой другой вектор  , коллинеарный данной прямой,
, коллинеарный данной прямой,
может быть выражен через вектор в виде  .
.
Базисом на плоскости называются любых два линейно независимых вектора  этой плоскости, взятые в определенном порядке. Любой третий вектор
этой плоскости, взятые в определенном порядке. Любой третий вектор  , компланарный плоскости, на которой выбран базис
, компланарный плоскости, на которой выбран базис  , может быть представлен в виде
, может быть представлен в виде  .
.
Базисом в трехмерном пространстве называются любые три некомпланарных вектора  взятые в определенном порядке. Такой базис обозначается
взятые в определенном порядке. Такой базис обозначается  . Пусть — произвольный вектор трехмерного пространства, в котором выбран базис . Тогда существуют числа
. Пусть — произвольный вектор трехмерного пространства, в котором выбран базис . Тогда существуют числа  такие, что:
такие, что:
 (4.5)
(4.5)
Коэффициенты называются координатами вектора в базисе , а формула (4.5) есть разложение вектора с по данному базису.
Координаты вектора в заданном базисе определяются однозначно. Введение координат для векторов позволяет сводить различные соотношения между векторами к числовым соотношениям между их координатами. Координаты линейной комбинации векторов равны таким же линейным комбинациям соответствующих координат этих векторов.
Декартовы прямоугольные координаты в пространстве. Координаты точек. Координаты векторов. Деление отрезка в данном отношении
Декартова прямоугольная система координат в пространстве определяется заданием единицы масштаба для измерения длин и трех пересекающихся в точке взаимно перпендикулярных осей, первая из которых называется осью абсцисс (Ох), вторая — осью ординат (Оу), третья — осью аппликат (Oz); точка О — начало координат (Рис. 4.4).
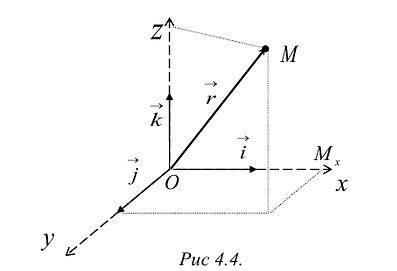
Положение координат осей можно задать с помощью единичных векторов  направленных по осям Ох, Оу, Oz. Векторы называются основными или базисными ортами и определяют базис
направленных по осям Ох, Оу, Oz. Векторы называются основными или базисными ортами и определяют базис  в трехмерном пространстве.
в трехмерном пространстве.
Пусть в пространстве дана точка М. Проектируя ее на ось Ох, получим точку Мх. Первой координатой х или абсциссой точки М называется длина вектора  , взятая со знаком плюс, если
, взятая со знаком плюс, если  направлен в ту же сторону, что и вектор
направлен в ту же сторону, что и вектор  , и со знаком минус -если в противоположную. Аналогично проектируя точку М на оси Оу и Oz, определим ее ординату у и аппликату z. Тройка чисел (х, у, z) взаимно однозначно соответствует точке М .
, и со знаком минус -если в противоположную. Аналогично проектируя точку М на оси Оу и Oz, определим ее ординату у и аппликату z. Тройка чисел (х, у, z) взаимно однозначно соответствует точке М .
Система координат называется правой, если вращение от оси Ох к оси Оу в ближайшую сторону видно с положительного направления оси Oz совершающимися против часовой стрелки, и левой, если вращение от оси Ох к оси Оу в ближайшую сторону видно совершающимися по часовой стрелке.
Вектор  , направленный из начала координат в точку М(х, у, z) называется радиус-вектором точки М, т.е.:
, направленный из начала координат в точку М(х, у, z) называется радиус-вектором точки М, т.е.:
 (4.6)
(4.6)
Если даны координаты точек  , то координаты вектора АВ получаются вычитанием из координат его конца В координат начала или
, то координаты вектора АВ получаются вычитанием из координат его конца В координат начала или  .
.
Следовательно, по формуле (4.5):
При сложении (вычитании) векторов их координаты складываются (вычитаются), при умножении вектора на число все его координаты умножаются на это число.
Длина вектора  равна квадратному корню из суммы квадратов его координат.
равна квадратному корню из суммы квадратов его координат.
 (4.8)
(4.8)
Длина вектора , заданного координатами своих концов, т.е. расстояние между точками А и В вычисляется по формуле:
, заданного координатами своих концов, т.е. расстояние между точками А и В вычисляется по формуле:
 (4.9)
(4.9)
Если  коллинеарны, то они отличаются друг от друга скалярным множителем. Следовательно, у коллинеарных векторов координаты пропорциональны:
коллинеарны, то они отличаются друг от друга скалярным множителем. Следовательно, у коллинеарных векторов координаты пропорциональны:
 (4.10)
(4.10)
Пусть точка М(х, у, z) делит отрезок между точками  и
и  в отношении
в отношении  , тогда радиус-вектор точки М выражается через радиусы-векторы
, тогда радиус-вектор точки М выражается через радиусы-векторы  его концов по формуле:
его концов по формуле:
Отсюда получаются координатные формулы:

В частности, если точка М делит отрезок  пополам, то
пополам, то

Направляющие косинусы
Пусть дан вектор  . Единичный вектор того же направления, что и
. Единичный вектор того же направления, что и  (орт вектора
(орт вектора  ) находится по формуле:
) находится по формуле:
Пусть ось  образует с осями координат углы
образует с осями координат углы . Направляющими косинусами оси называются косинусы этих углов:
. Направляющими косинусами оси называются косинусы этих углов:  . Если направление задано единичным вектором
. Если направление задано единичным вектором  , то направляющие косинусы служат его координатами, т.е.:
, то направляющие косинусы служат его координатами, т.е.:

Направляющие косинусы связаны между собой соотношением: 
Если направление задано произвольным вектором , то находят орт этого вектора и, сравнивая его с выражением для единичного вектора , получают:
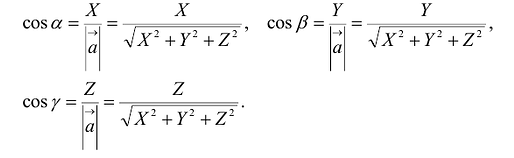
Скалярное произведение
Скалярными произведением  двух векторов
двух векторов  называется число, равное произведению их длин на косинус угла между ними
называется число, равное произведению их длин на косинус угла между ними 
Скалярное произведение обладает следующими свойствами:
4. Если — ненулевые векторы, то  тогда и только тогда, когда эти векторы перпендикулярны. Если
тогда и только тогда, когда эти векторы перпендикулярны. Если  , то угол между а и Ь— острый, если
, то угол между а и Ь— острый, если  , то угол — тупой;
, то угол — тупой;
5. Скалярный квадрат вектора а равен квадрату его длины, т.е.
Следовательно, 
Геометрический смысл скалярного произведения: скалярное произведение вектора на единичный вектор  равно проекции вектора
равно проекции вектора  на направление, определяемое
на направление, определяемое  , т.е.
, т.е.  .
.
Из определения скалярного произведения вытекает следующая таблица умножения ортов  :
:
Если векторы заданы своими координатами  и
и
 , то, перемножая эти векторы скалярно и используя таблицу умножения ортов, получим выражение скалярного произведения
, то, перемножая эти векторы скалярно и используя таблицу умножения ортов, получим выражение скалярного произведения  через координаты векторов:
через координаты векторов:
Векторное произведение
Векторным произведением вектора  на вектор
на вектор  называется вектор
называется вектор  длина и направление которого определяется условиями:
длина и направление которого определяется условиями:


3. направлен так, что кратчайший поворот от  виден из его конца совершающимся против часовой стрелки.
виден из его конца совершающимся против часовой стрелки.
Векторное произведение обладает следующими свойствами:  4. Векторное произведение равно нулю (нуль вектору) тогда и только тогда, когда коллинсарны. В частности
4. Векторное произведение равно нулю (нуль вектору) тогда и только тогда, когда коллинсарны. В частности для любого вектора ;
для любого вектора ;
5. Если неколлинеарны, то модуль векторного произведения равен площади параллелограмма S построенного на этих векторах, как на сторонах.
Из первых трех свойств следует, что векторное умножение суммы векторов на сумму векторов подчиняется обычным правилам перемножения многочленов. Надо только следить за тем, чтобы порядок следования множителей не менялся.
Основные орты перемножаются следующим образом: 
Если , то с учетом свойств векторного произведения векторов, можно вывести правило вычисления координат векторного произведения по координатам векторов-сомножителей :
, то с учетом свойств векторного произведения векторов, можно вывести правило вычисления координат векторного произведения по координатам векторов-сомножителей :
Если принять во внимание полученные выше правила перемножения ортов, то:
 (4.11)
(4.11)
Более компактную форму записи выражения для вычисления координат векторного произведения двух векторов можно построить, если ввести понятие определителя матрицы.
Рассмотрим частный случай, когда вектора  принадлежат плоскости Оху, т.е. их можно представить как
принадлежат плоскости Оху, т.е. их можно представить как и
и 
Если координаты векторов записать в виде таблицы следующим образом:  , то можно сказать, что из них сформирована квадратная матрица второго порядка, т.е. размером 2×2, состоящая из двух строк и двух столбцов. Каждой квадратной матрице ставится в соответствие число, которое вычисляется из элементов матрицы по определенным правилам и называется определителем. Определитель матрицы второго порядка равен разности произведений элементов главной диагонали и побочной диагонали:
, то можно сказать, что из них сформирована квадратная матрица второго порядка, т.е. размером 2×2, состоящая из двух строк и двух столбцов. Каждой квадратной матрице ставится в соответствие число, которое вычисляется из элементов матрицы по определенным правилам и называется определителем. Определитель матрицы второго порядка равен разности произведений элементов главной диагонали и побочной диагонали: 
В таком случае: 
Абсолютная величина определителя, таким образом, равна площади параллелограмма, построенного на векторах  , как на сторонах.
, как на сторонах.
Если сравнить это выражение с формулой векторного произведения (4.7), то:  (4.12) Это выражение представляет собой формулу для вычисления определителя матрицы третьего порядка по первой строке. Таким образом:
(4.12) Это выражение представляет собой формулу для вычисления определителя матрицы третьего порядка по первой строке. Таким образом:
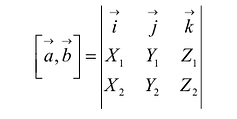
Определитель матрицы третьего порядка вычисляется следующим образом:
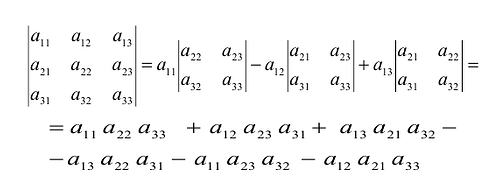
и представляет собой алгебраическую сумму шести слагаемых.
Формулу для вычисления определителя матрицы третьего порядка легко запомнить, если воспользоваться правилом Саррюса, которое формулируется следующим образом:
- Каждое слагаемое является произведением трех элементов, расположенных в разных столбцах и разных строках матрицы;
- Знак «плюс» имеют произведения элементов, образующих треугольники со стороной, параллельной главной диагонали;
- Знак «минус» имеют произведения элементов, принадлежащих побочной диагонали, и два произведения элементов, образующих треугольники со стороной, параллельной побочной диагонали.
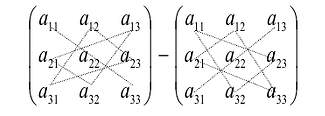
Смешанное произведение
Смешанным произведением тройки векторов  называется число, равное скалярному произведению вектора
называется число, равное скалярному произведению вектора  на векторное произведение
на векторное произведение 
Если рассматриваемые векторы  некомпланарны, то векторное произведение
некомпланарны, то векторное произведение  есть вектор, длина которого численно равна площади построенного на них параллелограмма. Направлен этот вектор по нормали к плоскости параллелограмма. Если этот вектор скалярно умножить на вектор а, то получившееся число будет равно произведению площади основания параллелепипеда, построенного на тройке векторов
есть вектор, длина которого численно равна площади построенного на них параллелограмма. Направлен этот вектор по нормали к плоскости параллелограмма. Если этот вектор скалярно умножить на вектор а, то получившееся число будет равно произведению площади основания параллелепипеда, построенного на тройке векторов  , и его высоты, т.е. объему этого параллелепипеда.
, и его высоты, т.е. объему этого параллелепипеда.
Таким образом, смешанное произведение векторов 
(которое обозначается есть число, абсолютная величина которого выражает объем параллелепипеда, построенного па векторах .
Знак произведение положителен, если векторы, образуют правую тройку векторов, т.е. вектор  направлен так, что кратчайший поворот от
направлен так, что кратчайший поворот от  виден из его конца совершающимся против часовой стрелки.
виден из его конца совершающимся против часовой стрелки.
Из геометрического смысла смешанного произведения непосредственно следует необходимое и достаточное условие некомпланарности векторов : для того, чтобы векторы были некомпланарными необходимо и достаточно, чтобы их сметанное произведение было отлично от нуля.
Если  и
и  то:
то:

или в свернутой форме:
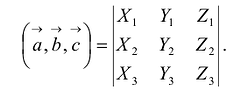
Справедливы следующие свойства сметанного произведения векторов:
- Смешанное произведение не меняется при циклической перестановке его сомножителей
- При перестановке двух соседних множителей смешанное произведение меняет свой знак на противоположный

Векторы в высшей математике
Определение вектора:
На начальной стадии, когда приходится прибегать к математическим методам исследования, необходимо разработать удобное средство организации исходных данных. Таким простейшим средством является вектор. Например, еженедельное изменение цены за месяц на некоторый товар удобно записать в виде массива: (5500; 5700; 6000; 6200). Записанный таким образом массив чисел называют вектором.
Алгебраические операции над векторами и их свойства
Введём теперь математическое определение векторов и алгебраические операции над ними.
Упорядоченную совокупность действительных чисел назовём вектором и обозначим
назовём вектором и обозначим  , т.е
, т.е  . Действительные числа
. Действительные числа  будем называть координатами вектора. Равные векторы имеют равные координаты. Вектор, все координаты которого равны нулю, называется нулевым вектором и обозначается
будем называть координатами вектора. Равные векторы имеют равные координаты. Вектор, все координаты которого равны нулю, называется нулевым вектором и обозначается  . Вектор, у которого одна из координат равна 1, а все остальные равны нулю, называется единичным вектором. Единичными векторами будут векторы:
. Вектор, у которого одна из координат равна 1, а все остальные равны нулю, называется единичным вектором. Единичными векторами будут векторы:

С геометрической точки зрения, вектор — это направленный отрезок. Поэтому вектор, длина которого равна единице, также называется единичным вектором.
Определим далее линейные операции над векторами: сложение и умножение вектора на число.
Сложение векторов
Пусть даны два вектора
 . Суммой двух векторов
. Суммой двух векторов  и
и
 назовем вектор
назовем вектор  , координаты которого равны суммам соответствующих координат векторов
, координаты которого равны суммам соответствующих координат векторов  :
:

Пусть дан вектор  . Обозначим через —
. Обозначим через — вектор, порождённый вектором
вектор, порождённый вектором  , такой, что
, такой, что  .
.
Сложение векторов обладает следующими свойствами:
- Для любых двух векторов существует единственный вектор , называемый суммой векторов .
- Для любых .
- Для любых .
- Существует единственный вектор , называемый нулевым вектором, такой, что для всех .
- Для любого вектора существует единственный вектор , такой, что . Вектор называется вектором, противоположным вектору
 существует единственный вектор
существует единственный вектор  , называемый суммой векторов
, называемый суммой векторов  .
. .
. .
. , называемый нулевым вектором, такой, что
, называемый нулевым вектором, такой, что  для всех
для всех  .
. существует единственный вектор
существует единственный вектор  , такой, что
, такой, что  . Вектор
. Вектор  называется вектором, противоположным вектору
называется вектором, противоположным вектору 
Из указанных свойств векторов следует, что можно рассматривать сумму любого конечного числа векторов  .
.
Умножение вектора на число
Пусть  и
и
 . Произведение вектора
. Произведение вектора  на число
на число  — это вектор, обозначаемый,
— это вектор, обозначаемый,  полученный умножением координат вектора
полученный умножением координат вектора  на число
на число  :
:
 .
.
Положим,  для любого вектора
для любого вектора  для любого числа
для любого числа  .
.
Умножение вектора на число обладает следующими свойствами:
- Для любого вектора и любого числа существует единственный вектор .
- для любых чисел и любого.
- для любых чисел и любого .
- для любых чисел и любого .
- для любого .
 и любого числа
и любого числа  существует единственный вектор
существует единственный вектор  .
. для любых чисел
для любых чисел  и любого
и любого .
. для любых чисел
для любых чисел  и любого .
и любого . для любых чисел
для любых чисел  и любого
и любого  .
. для любого
для любого  .
.Выражение  где
где  — вскто-ры, а
— вскто-ры, а  — любые действительные числа, называется ли-нейиой комбинацией векторов
— любые действительные числа, называется ли-нейиой комбинацией векторов  с коэффициентами
с коэффициентами  . Линейная комбинация векторов-это вектор. Вектор
. Линейная комбинация векторов-это вектор. Вектор  представленный в виде
представленный в виде  будем называть транспонированным по отношению к вектору
будем называть транспонированным по отношению к вектору  и обозначать
и обозначать  .
.
Замечание. Зная координаты вектора  , можно вычислить его длину по формуле
, можно вычислить его длину по формуле
 .
.
Пример №16
Найти линейную комбинацию  векторов
векторов  .
.
Решение:
Воспользуемся определением линейной комбинации векторов и операций над векторами. Тогда получим вектор вида:

Скалярное произведение векторов и его свойства
Предположим, что объем продаж трёх видов товаров фирмы  в течение месяца составил 34, 57, 21 единиц, и что цены этих же товаров были равны соответственно 2, 3, 7 дсн.ед. Следовательно, общий доход от продажи всех трёх товаров за месяц равен:
в течение месяца составил 34, 57, 21 единиц, и что цены этих же товаров были равны соответственно 2, 3, 7 дсн.ед. Следовательно, общий доход от продажи всех трёх товаров за месяц равен:  ден.ед. Представим данные о продажах с помощью вектора:
ден.ед. Представим данные о продажах с помощью вектора:  , а соответствующие цены с помощью вектора
, а соответствующие цены с помощью вектора  . Тогда общий доход от продажи трёх товаров, равный 386 ден.ед., представляет собой сумму произведений элементов вектора
. Тогда общий доход от продажи трёх товаров, равный 386 ден.ед., представляет собой сумму произведений элементов вектора  на соответствующие элементы вектора
на соответствующие элементы вектора  :
: .
.
Приведенный пример помогает уяснить общую методику введения скалярного произведения векторов.
Определепие2.2.1. Скалярным произведением векторов  называется число, обозначаемое
называется число, обозначаемое  , равное сумме произведений соответствующих коорди-. пат векторов
, равное сумме произведений соответствующих коорди-. пат векторов  :
:

Это определение можно применять только в тех случаях, когда векторы  содержат одинаковое количество координат; в противном случае скалярное произведение
содержат одинаковое количество координат; в противном случае скалярное произведение  не может быть определено.
не может быть определено.
Укажем некоторые свойства скалярного произведения:
- ;
- ;
- ;
- .
 ;
; ;
; ;
; .
.Два ненулевых вектора  называются ортогональными, если их скалярное произведение равно нулю, т.е.
называются ортогональными, если их скалярное произведение равно нулю, т.е.

Рассмотрим систему n ненулевых векторов  . Если
. Если
скалярное произведение каждого вектора на себя равно единице, а скалярное произведение различных векторов равно нулю, т.е.

то система векторов  называется ортоиормированной. Условия (1.3) можно записать в координатной форме:
называется ортоиормированной. Условия (1.3) можно записать в координатной форме:

где  .
.
Пример №17
Найти вектор  коллинеарный1 вектору
коллинеарный1 вектору  и удовлетворяющий условию
и удовлетворяющий условию  .
.
Решение:
Так как вектор  коллинеарный вектору
коллинеарный вектору  , то его координаты пропорциональны координатам вектора
, то его координаты пропорциональны координатам вектора  , т.е.
, т.е.
 . Воспользовавшись определением скалярного произведения, составим равенство:
. Воспользовавшись определением скалярного произведения, составим равенство:  .
.
Откуда следует, что  . Тогда вектор коллинеарный вектору я будет иметь координаты: (6,-2,8).
. Тогда вектор коллинеарный вектору я будет иметь координаты: (6,-2,8).
Пример №18
Пусть рассматривается проект вложения капитала на четыре года. Этот проект должен обеспечивать следующую денежную выручку: в первый год- 1000 дсн.ед.; во второй — 3000 дсн.ед.; в третий — 10000 ден.ед.; в четвёртый — 15000 дсн.ед. Проект будет принят в том случае, если совокупный доход от капиталовложений (в пересчёте на сегодняшний доход) будет превышать требующиеся затраты, составляющие 17000 дсн.ед. Дисконтирование ожидаемого дохода проводится по годовой ставке равной 10%. Будет ли принят рассматриваемый проект?
Решение:
При ставке дисконтирования 10% годовых, доход, который будет получен на протяжении первого года, должен быть умножен на  , на протяжении второго года- на
, на протяжении второго года- на  , на протяжении третьего года- на 0,7513 =
, на протяжении третьего года- на 0,7513 = и на протяжении четвёртого года- на 0,6838 =
и на протяжении четвёртого года- на 0,6838 = .
.
1. Вектор  называется коллинеарным вектору
называется коллинеарным вектору  , если при совмещении их начальных точек они располагаются на одной прямой.
, если при совмещении их начальных точек они располагаются на одной прямой.
Запишем денежную выручку и дисконтирующие множители в векторной форме:

и
 .
.
Скалярное произведение векторов  и
и  —
—  —определяет дисконтированный совокупный доход за четыре года:
—определяет дисконтированный совокупный доход за четыре года: 
Так как 21158,3>17000, то рассматриваемый проект вложения капитала будет принят.
Операции над векторами в высшей математике
Внимание! Вектор определяется числом и направлением.
Отрезком АВ называется множество точек, заключенных между точками
А и В, включая их. Точки А и В называются концами отрезка.
Отрезок АВ называется направленным, если его концы упорядочены.
Направленный отрезок с началом в точке А и концом в точке В будем обозначать АВ. Направленный отрезок ВА с началом в точке В и концом в точке А называется противоположно направленным отрезку АВ.
Модулем  направленного отрезка АВ называется его длина.
направленного отрезка АВ называется его длина.
Вектором называется класс направленных отрезков, расположенных на параллельных или совпадающих прямых и имеющих одинаковые направление и длину.
Векторы геометрически изображают направленными отрезками и обозначаются  и буквами жирного шрифта
и буквами жирного шрифта 

Вывод. Вектор однозначно определяется своим одним направленным отрезком. Пусть заданы два вектора  и
и  (рис.1). Суммой векторов а и b
(рис.1). Суммой векторов а и b
называется вектор, проведенный из начала а к концу b: 
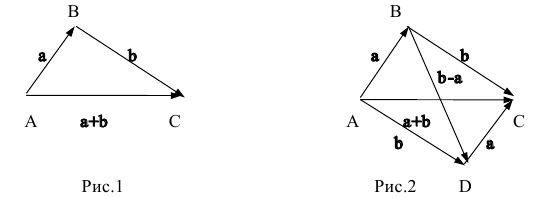
Способ сложения векторов, показанный на рис.1, называется правилом треугольника.
Замечание. На векторах а и b можно построить параллелограмм, в котором одна диагональ будет их суммой:  , а вторая — разностью:
, а вторая — разностью:  Способ сложения векторов, показанный на рис.2, называется правилом параллелограмма.
Способ сложения векторов, показанный на рис.2, называется правилом параллелограмма.
Множество всех нулевых отрезков называется нулевым вектором и обозначается 0. Направление нулевого вектора произвольно.
Вектор, длина которого равна единице, называется единичным.
Для любого вектора а верны равенства:

Произведением вектора а на число  отличное от нуля, называется вектор, обозначаемый
отличное от нуля, называется вектор, обозначаемый  и удовлетворяющий следующим условиям:
и удовлетворяющий следующим условиям:
- длина вектора равна длине вектора а, умноженного на модуль числа
- векторы а и одинаково направлены, если , и противоположно направлены, если (рис.З).
 равна длине вектора а, умноженного на модуль числа
равна длине вектора а, умноженного на модуль числа
 , и противоположно направлены, если
, и противоположно направлены, если  (рис.З).
(рис.З).Произведение вектора на число «нуль» есть нулевой вектор. 
Углом между двумя векторами а и b называется наименьший угол  на который нужно повернуть один вектор, чтобы он совпал по направлению с другим вектором (рис.4).
на который нужно повернуть один вектор, чтобы он совпал по направлению с другим вектором (рис.4).
Проекцией вектора а на вектор b называется длина вектора а, умноженная на косинус угла между векторами а и b (рис.4):

Внимание! Для ненулевых векторов возможны три варианта произведений: скалярное произведение (в ответе получается число), векторное произведение (в ответе получается вектор) и смешанное произведение (в ответе получается число).
Скалярным произведением двух ненулевых векторов а и b называется число, равное произведению длин этих векторов на косинус угла между ними. Обозначение: 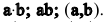 Таким образом,
Таким образом,

Например, для скалярного квадрата ii, где i -единичный вектор, имеем 
Векторным произведением двух ненулевых векторов а и b называется такой вектор  что
что
- 1) его модуль равен площади параллелограмма, построенного на данных векторах, т.е.
- 2) он перпендикулярен плоскости построенного на данных векторах параллелограмма, , т.е.
- 3) векторы образуют правую тройку векторов, т.е. при наблюдении из конца вектора кратчайший поворот от а к b виден против часовой стрелки.


 образуют правую тройку векторов, т.е. при наблюдении из конца вектора
образуют правую тройку векторов, т.е. при наблюдении из конца вектора  кратчайший поворот от а к b виден против часовой стрелки.
кратчайший поворот от а к b виден против часовой стрелки.Пример №19
Найти площадь параллелограмма, построенного на векторах а и b. если а — единичный вектор, длина вектора b равна трем, а их скалярное произведение — двум.
Решение:
Площадь параллелограмма, построенного на векторах а и b, равна 
 .
.
По условию задачи имеем 
Найдем синус угла между векторами а и b. Так как  то
то 
Следовательно, 
Подставим найденное значение в формулу и получим:  Задача решена.
Задача решена.
Смешанным произведением трех ненулевых векторов а, b и с называется число, равное скалярному произведению векторного произведения первых двух векторов а и b на третий вектор  . Обозначение:
. Обозначение: 
Замечание. Смешанное произведение не меняется при циклической перестановке его сомножителей. При перестановке двух соседних множителей смешанное произведение меняет свой знак на противоположный, т.е. 
Геометрический смысл смешанного произведения. Модуль смешанного произведения трех векторов равен объему параллелепипеда, построенного на этих векторах.
Действительно,
 где S — площадь основания параллелепипеда, H — высота параллелепипеда, V -объем параллелепипеда.
где S — площадь основания параллелепипеда, H — высота параллелепипеда, V -объем параллелепипеда.
Два вектора называются ортогональными, если угол между ними равен 
Необходимое и достаточное условие ортогональности:
Два ненулевых вектора ортогональны тогда и только тогда, когда их скалярное произведение равно нулю  Нулевой вектор ортогонален любому вектору.
Нулевой вектор ортогонален любому вектору.
Два вектора называются коллинеарными, если они лежат на одной прямой. Пулевой вектор коллинеарен любому вектору.
Необходимое и достаточное условие коллинеарности:
- Два ненулевых вектора а и b коллинеарны тогда и только тогда, когда они пропорциональны, т.е. — произвольное число, отличное от нуля.
- Два ненулевых вектора коллинеарны тогда и только тогда, когда их векторное произведение равно нулевому вектору (площадь параллелограмма равна нулю).
 — произвольное число, отличное от нуля.
— произвольное число, отличное от нуля.Три вектора называются компланарными, если они лежат на одной плоскости. Любую тройку векторов, содержащую нулевой вектор, считают компланарной.
Необходимое и достаточное условие компланарности. Три ненулевых вектора компланарны тогда и только тогда, когда их смешанное произведение равно нулю (объем параллелепипеда равен нулю).
Действия над векторами, заданными прямоугольными координатами
Пусть Ох, Оу, Oz — три взаимно перпендикулярные оси в трехмерном пространстве (оси координат), исходящие из общей точки О (начала координат) и образующие правую тройку (рис. 5).
Точка М с координатами х, у, z обозначается M(x,y,z), причем первая координата называется абсциссой, вторая — ординатой, третья — аппликатой точки М.
Для каждой точки М пространства существует ее радиус-вектор r=ОМ, начало которого есть начало координат О и конец которого есть данная точка М. Координаты x,y,z точки М являются проекциями радиус-вектора r на оси Ох, Оу, Oz соответственно.
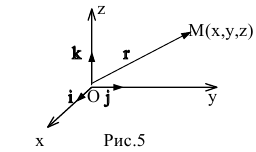 Пусть в прямоугольной системе координат заданы точки
Пусть в прямоугольной системе координат заданы точки  и
и  Тогда координаты вектора АВ вычисляются по формуле:
Тогда координаты вектора АВ вычисляются по формуле:

(«от координат конца отнимают координаты начала»).
Например, координаты радиус-вектора 
Если ввести единичные векторы i,j, k, направленные по осям Ох, Оу, Oz соответственно (рис.5), то координаты вектора r можно записать в эквивалентной форме:

Векторы i, j,k называются базисными.
Пусть даны два вектора 
Сложив векторы почленно, получим: 
или

Умножив вектор а на число  получим:
получим:

или

Пример №20
Найти вектор х из уравнения

Решение:
Выразим х из векторного уравнения:

Подставим векторы а, b и с в полученное выражение:
Задача решена.
Скалярное произведение двух векторов в координатной форме вычисляется по формуле:

Для cкалярного квадрата аа получаем: 
но, с другой стороны,  Следовательно,
Следовательно,
Мы получили формулу вычисления длины вектора, заданного в координатной форме.
Векторное произведение двух векторов в координатной форме вычисляется по формуле

которую можно выразить через символический определитель третьего порядка 
Смешанное произведение трех векторов в координатной форме  определяется формулой
определяется формулой 
- Заказать решение задач по высшей математике
Пример №21
Вершины треугольной пирамиды находятся в точках А( 1,1 ,-1), В(2,1,-3), С(-1,1,1), D(0,7,3). Вычислить высоту пирамиды, опущенную из вершины D на основание АВС.
Решение:
Высоту треугольной пирамиды найдем из формулы:
где  — объем пирамиды ABCD,
— объем пирамиды ABCD,  — площадь основания АВС, H — высота пирамиды, опущенная из вершины D.
— площадь основания АВС, H — высота пирамиды, опущенная из вершины D.
Найдем площадь треугольника АВС. Она равна половине площади параллелограмма, построенного, например, на векторах АВ и АС. Следовательно, по определению векторного произведения
 По координатам точек А, В и С найдем координаты векторов АВ и АС:
По координатам точек А, В и С найдем координаты векторов АВ и АС:
Векторное произведение АВ и АС в координатной форме равно 
Найдем объем треугольной пирамиды. Он равен одной шестой объема параллелепипеда, построенного, например, на векторах АВ, АС и AD. Тогда по геометрическому смыслу смешанного произведения  Найдем координаты вектора AD:
Найдем координаты вектора AD:

Смешанное произведение АВ, АС и AD в координатной форме равно  разложим определитель по второму столбцу
разложим определитель по второму столбцу

Задача решена.
Замечание.
- 1. Площадь треугольника АВС можно находить из площади параллелограмма, построенного на любых двух векторах, исходящих из одной вершины, например: АВ и АС; ВА и ВС; СА и СВ.
- 2. Объем треугольной пирамиды ABCD можно находить из объема параллелепипеда, построенного на любых трех векторах, исходящих из одной точки, например: АВ, АС и AD; ВА, ВС и BD; СА, СВ и CD; DA, DB и DC.
Линейное пространство
Идея линейности является одним из важнейших принципов математики. На этой основе построены различные разделы математики. Более того, почти каждый экономический процесс в малом является линейным, что позволяет делать о нём достаточно точные выводы, изучая линейный, гораздо более простой для исследования объект.
В математике часто приходится встречаться с объектами, для которых определены операции сложения и умножения на числа. Объектами такого рода являются векторы, функции, матрицы и т.д. Для того, чтобы изучать все такие объекты с единой точки зрения и вводится понятие линейного пространства.
Определение 2.3.1. Множество L элементов х, у, z,… называется линейным пространством, если:
При этом введенные операции должны удовлетворять следующим требованиям (аксиомам):
- х+у = у+х (коммутативности);
- (х+у)+ z = x+(y+z) (ассоциативности);
- существует элемент 0, такой, что х+0=х для любого х. Элемент 0 называется нулевым элементом;
- для каждого х существует противоположный элемент, обозначаемый -х, такой, что х+(-х)=0;
- ;
- ;
- :;
- ,
 ;
; ;
; :;
:; ,
,где  и
и  — вещественные числа.
— вещественные числа.
В определении линейного пространства не говорится, как определяются операции сложения и умножения на числа, и не говорится о природе объектов. Требуется только, чтобы были выполнены сформулированные выше аксиомы. Поэтому всякий раз, когда мы встречаемся с операциями, удовлетворяющими этим условиям, будем считать их операциями сложения и умножения.
Рассмотрим систему векторов на плоскости и в трёхмерном пространстве, для которых определены операции сложения векторов и умножения вектора на число как в п.2.1. Так как для этих операций выполняются свойства (1) — (8) определения 2.3.1, то они образуют линейное пространство.
Линейное пространство образует и совокупность многочленов степени не выше п с вещественными коэффициентами, для которых определены обычные операции сложения многочленов и умножения многочлена на число.
Линейное пространство, в котором введено скалярное произведение, называется евклидовым.
Пространство, где векторами являются наборы из n действительных чисел с покомпонентными операциями сложения и умножения их на число, и скалярное произведение определяется по формуле (1.2.1), является евклидовым пространством. Это пространство обозначается  .
.
Линейно зависимые и линейно независимые векторы. Свойства линейной зависимости векторов.
Определение линейной комбинации векторов, тесно связано с понятием подпространства векторного пространства.
Определение 2.4.1. Некоторое непустое подмножество векторного пространства М называется подпространством, если оно само является векторным пространством.
А доказательство того, что подмножество является векторным пространством, проводится на основании доказательства того, что всякая линейная комбинация любых двух векторов этого подмножества, также является вектором этого подмножества.
Определение 2.4.2. Векторы  из
из  называются линейно независимыми, если не существует чисел
называются линейно независимыми, если не существует чисел  хотя бы одно из которых отлично от нуля, таких, что
хотя бы одно из которых отлично от нуля, таких, что 
Если равенство (2.4.1) возможно и при ненулевом значении хотя бы одного числа  , то векторы
, то векторы  называются линейно зависимыми.
называются линейно зависимыми.
Пример №22
Рассмотрим евклидово пространство  и векторы
и векторы 
называемые координатными векторами. Покажем, что в пространстве  векторы
векторы линейно независимы.
линейно независимы.
Решение:
Пусть  произвольные числа. Составим линейную комбинацию векторов
произвольные числа. Составим линейную комбинацию векторов  :
:

Подставив координаты векторов  , получим:
, получим:
В результате получили вектор , который будет нулевым если
, который будет нулевым если  . Следовательно, линейная комбинация
. Следовательно, линейная комбинация  , может равняться нулю если
, может равняться нулю если  . А это и есть условие линейной независимости векторов
. А это и есть условие линейной независимости векторов  .
.
Вектор  называется линейной комбинацией векторов
называется линейной комбинацией векторов  из
из  , если существуют числа
, если существуют числа , такие, что выполняется равенство:
, такие, что выполняется равенство:  .
.
Относительно линейной зависимости векторов справедливы следующие утверждения:
- Если совокупность векторов из содержит нулевой вектор, то она линейно зависима.
- Если в системе векторов имеется подсистема линейно зависимых векторов, то и вся совокупность векторов линейно зависима.
- Система векторов из линейно зависима тогда и только тогда, если один из векторов этой системы является линейной комбинацией остальных.
- Любые векторов из , каждый из которых является линейной комбинацией m векторов линейно зависимы. .
 из
из  содержит нулевой вектор, то она линейно зависима.
содержит нулевой вектор, то она линейно зависима. имеется подсистема линейно зависимых векторов, то и вся совокупность векторов
имеется подсистема линейно зависимых векторов, то и вся совокупность векторов  линейно зависима.
линейно зависима. из
из  линейно зависима тогда и только тогда, если один из векторов этой системы является линейной комбинацией остальных.
линейно зависима тогда и только тогда, если один из векторов этой системы является линейной комбинацией остальных. векторов
векторов  из
из  , каждый из которых является линейной комбинацией m векторов
, каждый из которых является линейной комбинацией m векторов  линейно зависимы. .
линейно зависимы. .Пример №23
Выясним линейную зависимость векторов  и
и  . Решение. Составим линейную комбинацию этих векторов
. Решение. Составим линейную комбинацию этих векторов
Полученный вектор является нулевым, если координаты равны нулю:
Полученная система имеет только одно решение  . Следовательно, векторное равенство
. Следовательно, векторное равенство  выполняется при нулевых значениях коэффициентов
выполняется при нулевых значениях коэффициентов  . Это значит, что векторы
. Это значит, что векторы  линейно независимы.
линейно независимы.
Заметим, что два геометрических вектора линейно зависимы тогда и только тогда, когда они коллинеарны (их направления параллельны). Три геометрических вектора линейно зависимы тогда и только тогда, когда они компланарны (их направления параллельны некоторой плоскости).
Элементы векторной алгебры
Некоторые физические величины (например, температура, масса, объем, работа, потенциал) могут быть охарактеризованы одним числом, которое выражает отношение этой величины к соответствующей единице измерения; такие величины называются скалярными. Ещё примеры скалярных величин: длина, площадь, время, угол, плотность, сопротивление.
Другие величины (например, сила, скорость, ускорение, напряжённость электрического или магнитного поля) характеризуются числом и направлением. Эти величины называются векторными.
Необходимо подчеркнуть, что вектор не является числом. Если мы рассматриваем вектор, лежащий в плоскости, то для его описания необходимо знать два фактора – модуль и его направление (например, угол, образуемый им с одним из осей координат). Если рассматривается вектор в трехмерном пространстве, то для описания вектора требуется три фактора: один – величину для его модуля и два для указания его положения в системе координат.
Скаляры и векторы
Величина, полностью характеризуемая своим числовым значением в выбранной системе единиц, называется скалярной или скаляром. Таковы, например, масса тела, объем его, температура среды и т. п. Скаляр определяется числом положительным или отрицательным или равным нулю.
Величина, кроме числового значения характеризуемая еще направлением, называется векторной или вектором. К числу их относятся сила, перемещение, скорость и т.п. Вектор определяется числом и направлением.
Векторы обычно обозначают буквами жирного шрифта, например а. Геометрически вектор изображается направленным отрезком пространства (рис. 168); при этом используется обозначение а =  , где точка А — начало В отрезка, а точка В — конец его. В дальнейшем, для наглядности изложения, векторы мы будем рассматривать как направленные отрезки.
, где точка А — начало В отрезка, а точка В — конец его. В дальнейшем, для наглядности изложения, векторы мы будем рассматривать как направленные отрезки.
Под модулем (длиной) вектора а

понимается числовое значение его, без учета направления. (Естественно,  обозначает модуль вектора ) Вектор 0, модуль которого равен нулю, называется нулевым или нуль-вектором (направление нулевого вектора произвольно).
обозначает модуль вектора ) Вектор 0, модуль которого равен нулю, называется нулевым или нуль-вектором (направление нулевого вектора произвольно).
Два вектора  считаются равными, если они расположены на параллельных или совпадающих прямых (параллельность в широком смысле) и имеют одинаковую длину и одинаково направлены. Мы условимся не различать равные векторы и, таким образом, приходим к понятию свободного вектора. Иными словами, свободный вектор допускает перенос его в любую точку пространства при условии сохранения длины и направления.
считаются равными, если они расположены на параллельных или совпадающих прямых (параллельность в широком смысле) и имеют одинаковую длину и одинаково направлены. Мы условимся не различать равные векторы и, таким образом, приходим к понятию свободного вектора. Иными словами, свободный вектор допускает перенос его в любую точку пространства при условии сохранения длины и направления.
В частности, для свободных векторов можно обеспечить общую начальную точку их. В дальнейшем мы будем излагать теорию свободных векторов в трехмерном пространстве.
Сумма векторов
Определение: Суммой нескольких векторов, например а, b, с, d (рис. 169), называется вектор

по величине и направлению равный замыкающей ОМ пространственной ломаной линии, построенной на данных векторах.
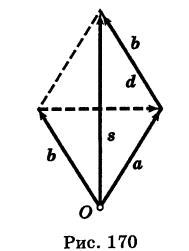
Для случая двух векторов а и b (рис. 170) их суммой s является диагональ параллелограмма, построенного на этих векторах, исходящая из общей точки приложения их (правило параллелограмма).
Так как в треугольнике длина одной стороны не превышает суммы длин двух других сторон, то из рис. 170 имеем

т. е. модуль суммы двух векторов не превышает суммы модулей этих векторов.
Для случая трех векторов а, b, с (рис. 171) их суммой s является диагональ  параллелепипеда, построенного на этих векторах (правило параллелепипеда).
параллелепипеда, построенного на этих векторах (правило параллелепипеда).
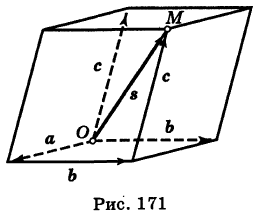
Легко проверить, что для векторного сложения справедливы следующие свойства:
1)переместительное свойство
а + b = b + а,
т. е. векторная сумма не зависит от порядка слагаемых;
2)сочетательное свойство

т.е. сумма трех (и большего числа) векторов не зависит от порядка расстановки скобок.
Для каждого вектора  (рис. 172) существует противоположный вектор
(рис. 172) существует противоположный вектор 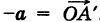 , имеющий ту же длину, но противоположное направление. По правилу параллелограмма, очевидно, имеем
, имеющий ту же длину, но противоположное направление. По правилу параллелограмма, очевидно, имеем

где 0 — нуль-вектор.

Легко проверить, что а + 0 = а.
Разность векторов
Под разностью векторов  (рис. 173) понимается вектор
(рис. 173) понимается вектор

такой, что

Отметим, что в параллелограмме, построенном на данных векторах (см. рис. 170), их разностью является соответственно направленная вторая диагональ.
Легко проверить, что справедливо следующее правило вычитания:

Умножение вектора на скаляр
Определение: Произведением вектора а на скаляр k (рис. 174) называется вектор
имеющий длину b = а, направление которого: 1) совпадает
а, направление которого: 1) совпадает
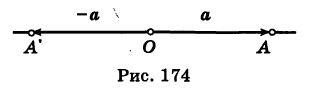
с направлением вектора а, если k > 0; 2) противоположно ему, если k < 0; 3) произвольно, если k = 0.
Нетрудно убедиться, что эта векторная операция обладает следующими свойствами:
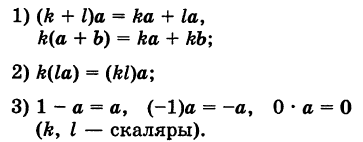
Пример:

Если ненулевой вектор а разделить на его длину a = |a| (т.е. умножить на скаляр 1 /а), то мы получим единичный вектор е, так называемый  , того же направления: е = а/а. Отсюда имеем стандартную формулу вектора
, того же направления: е = а/а. Отсюда имеем стандартную формулу вектора

Формула (1) формально справедлива также и для нулевого вектора а = 0, где а = 0 и е — произвольный орт.
Коллинеарные векторы
Определение: Два вектора  (рис. 175) называются коллинеарными, если они параллельны в широком смысле (т. е. расположены или на параллельных прямых, или же на одной и той же прямой).
(рис. 175) называются коллинеарными, если они параллельны в широком смысле (т. е. расположены или на параллельных прямых, или же на одной и той же прямой).
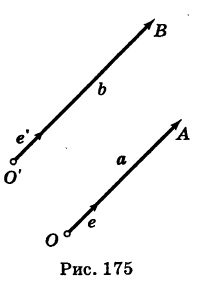
Так как направление нулевого вектора произвольно, то можно считать, что нулевой вектор коллинеарен любому вектору.
Теорема: Два ненулевых вектора  коллинеарны тогда и только тогда, когда они пропорциональны, т.е.
коллинеарны тогда и только тогда, когда они пропорциональны, т.е.

(k — скаляр).
Доказательство: 1) Пусть векторы 
 коллинеарны и е, е’ — их орты. Имеем
коллинеарны и е, е’ — их орты. Имеем

Очевидно,

где знак плюс соответствует векторам одинакового направления, а знак минус— векторам противоположного направления.
Из формул (2) и (3) получаем

Отсюда вытекает формула (1), где 
2) Если выполнено равенство (1), то коллинеарность векторов непосредственно следует из смысла умножения векторов на скаляр.
Компланарные векторы
Определение: Три вектора a, b и с называются компланарны ми, если они параллельны некоторой плоскости в широком смысле (т. е. или параллельны плоскости, или лежат в ней).
Можно сказать также, что векторы а, b и с компланарны тогда и только тогда, когда после приведения их к общему началу они лежат в одной плоскости.
По смыслу определения тройка векторов, среди которых имеется хотя бы один нулевой, компланарна.
Теорема: Три ненулевых вектора а, b и с компланарны тогда и только тогда, когда один из них является линейной комбинацией других, т.е., например,

(k, I — скаляры).
Доказательство: 1) Пусть векторы а, b и с компланарны, расположены в плоскости Р (рис. 176) и имеют общую точку приложения О.
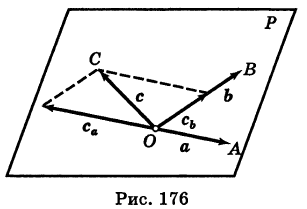
Предположим сначала, что эти векторы не все попарно коллинеарны, например векторы а и b неколлинеарны. Тогда, производя разложение вектора с в сумму векторов са и сь, коллинеарных соответственно векторам а и b, в силу будем иметь

где k и I — соответствующие скаляры.
Если векторы а, b, с попарно коллинеарны, то можно написать

таким образом, снова выполнено условие (1).
2) Обратно, если для векторов  (рис. 176) выполнено условие (1), то на основании смысла соответствующих векторных операций вектор с расположен в плоскости, содержащей векторы а и b, т. е. эти векторы компланарны.
(рис. 176) выполнено условие (1), то на основании смысла соответствующих векторных операций вектор с расположен в плоскости, содержащей векторы а и b, т. е. эти векторы компланарны.
Пример:
Векторы а, а + b, а — b компланарны, так как
Проекция вектора на ось
Осью называется направленная прямая. Направление прямой обычно обозначается стрелкой. Заданное направление оси будем считать положительным, противоположное — отрицательным.
Определение: Проекцией точки А на ось  (рис.177) называется основание А’ перпендикуляра АА’, опущенного из точки А на эту ось.
(рис.177) называется основание А’ перпендикуляра АА’, опущенного из точки А на эту ось.
Здесь под перпендикуляром АА’ понимается прямая, пересекающая ось и составляющая с ней прямой угол. Таким образом, проекция А есть пересечение плоскости, проходящей через точку А и перпендикулярной оси с этой осью.
Определение: Под ком-по не н той (составляющей) вектора  относительно оси (рис. 177) понимается вектор а’ = АВ’, начало которого А есть проекция на ось начала А вектора а, а конец которого В’ есть проекция на ось конца В этого вектора.
относительно оси (рис. 177) понимается вектор а’ = АВ’, начало которого А есть проекция на ось начала А вектора а, а конец которого В’ есть проекция на ось конца В этого вектора.
Определение: Под проекцией вектора а на ось понимается скаляр  , равный длине {модулю) его компоненты а’ относительно оси , взятой со знаком плюс.
, равный длине {модулю) его компоненты а’ относительно оси , взятой со знаком плюс.
Напомним, что все геометрические объекты мы здесь рассматриваем в трехмерном пространстве.
Если направление компоненты совпадает с направлением оси , и со знаком минус, если направление компоненты противоположно направлению оси
Если а = О, то полагают = О.
= О.
Заметим, что если е — единичный вектор оси , то для компоненты а’ справедливо равенство

Теорема: Проекция вектора а на ось равна произведению длины а вектора на косинус угла между направлением вектора и направлением оси, т.е.

Доказательство: Так как вектор  свободный (рис. 178), то можно предположить, что начало его О лежит на оси .
свободный (рис. 178), то можно предположить, что начало его О лежит на оси .
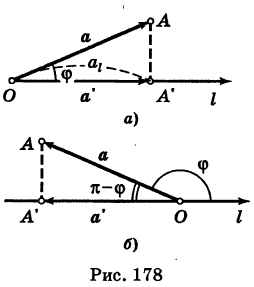
1) Если угол ф между вектором a и осью острый 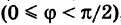 , то направление компоненты
, то направление компоненты  вектора а совпадает с направлением оси (рис. 178, а). В этом случае имеем
вектора а совпадает с направлением оси (рис. 178, а). В этом случае имеем

2) Если угол ф между вектором а и осью тупой  (рис. 178, б), то направление компоненты вектора а противоположно направлению оси Тогда получаем
(рис. 178, б), то направление компоненты вектора а противоположно направлению оси Тогда получаем

3) Если же ф =  , то формула (2), очевидно, выполняется, так как при этом
, то формула (2), очевидно, выполняется, так как при этом  .
.
Таким образом, формула (2) доказана.
Следствие 1. Проекция вектора на ось: 1) положительна, если вектор образует с осью острый угол; 2) отрицательна, если этот угол — тупой, и 3) равна нулю, если этот угол — прямой.
Следствие 2. Проекции равных векторов на одну и ту же ось равны между собой.
Теорема: Проекция суммы нескольких векторов на данную ось равна сумме их проекций на эту ось.
Доказательство: Пусть, например, s = a + b + с,
где (рис. 179) 

 и, следовательно,
и, следовательно,  .
.
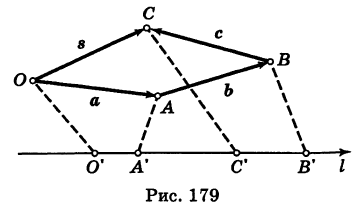
Обозначая проекции точек  на ось
на ось  через
через  и учитывая направления компонент (рис. 179), имеем
и учитывая направления компонент (рис. 179), имеем

что и требовалось доказать.
Следствие. Проекция замкнутой векторной линии на любую ось равна нулю.
Теорема: При умножении вектора на скаляр его проекция на данную ось умножается на этот скаляр, т.е.

Формула (4) следует из теоремы 1 и смысла умножения вектора на скаляр.
Следствие. Проекция линейной комбинации векторов равна такой же линейной комбинации проекций этих векторов, т.е.

Прямоугольные декартовы координаты в пространстве
Пусть (рис. 180) Ox, Оу, Oz — три взаимно перпендикулярные оси в трехмерном пространстве (оси координат), исходящие из общей точки О (начало координат) и образующие правую тройку (правая система координат), т. е. ориентированные по правилу правого буравчика. Иными словами, для наблюдателя, направленного по оси Oz, кратчайший поворот оси Ох к оси Оу происходит против хода часовой стрелки.
Три взаимно перпендикулярные плоскости Oyz, Ozx и Оху, проходящие через соответствующие оси, называются координатными плоскостями; они делят все пространство на восемь октантов.
Для каждой точки М пространства (рис. 180) существует ее радиус-вектор г = ОМ, начало которого есть начало координат О и конец которого есть данная точка М.
Определение: Под декартовыми прямоугольными координатами х, у, z точки М понимаются проекции ее радиуса вектора г на соответствующие оси координат, т. е.

В дальнейшем для краткости декартовы прямоугольные координаты мы будем называть просто прямоугольными координатами.
Точка М с координатами х, у, z обозначается через М (х, у, z), причем первая координата называется абсциссой, вторая — ординатой, а третья — аппликатой точки М.
Для нахождения этих координат через точку М проведем три плоскости МА, MB, МС, перпендикулярные соответственно осям Ox, Оу, Oz (рис. 180). Тогда на этих осях получатся направленные отрезки

численно равные координатам точки М.
Радиус-вектор г является диагональю параллелепипеда П с измерениями  , образованного плоскостями МА, МБ, МС и координатными плоскостями. Поэтому
, образованного плоскостями МА, МБ, МС и координатными плоскостями. Поэтому

Если обозначить через  углы, образованные радиусом-вектором г с координатными осями, то будем иметь
углы, образованные радиусом-вектором г с координатными осями, то будем иметь

Косинусы cos а, cos р, cos у называются направляющими косинусами радиуса-вектора г. Из (4), учитывая (3), получаем

т. е. сумма квадратов направляющих косинусов радиуса-век-тора точки пространства равна 1.
Из формулы (4) следует, что координата точки М положительна, если радиус-вектор этой точки образует острый угол с соответствующей координатной осью, и отрицательна, если этот угол тупой. В частности, в I октанте пространства, ребра которого составляют положительные полуоси координат, все координаты точек положительны- В остальных октантах пространства отрицательными координатами точек будут те, которые соответствуют отрицательно направленным ребрам октанта.
Измерения  параллелепипеда П равны расстояниям точки М соответственно от координатных плоскостей Oyz, Ozx, Оху. Таким образом, декартовы прямоугольные координаты точки М пространства представляют собой расстояния от этой точки до координатных плоскостей, взятые с надлежащими знаками,
параллелепипеда П равны расстояниям точки М соответственно от координатных плоскостей Oyz, Ozx, Оху. Таким образом, декартовы прямоугольные координаты точки М пространства представляют собой расстояния от этой точки до координатных плоскостей, взятые с надлежащими знаками,
В частности, если точка  лежит на плоскости Oyz, то х = 0; если на плоскости Ozx, то у = 0; если же на плоскости Оху, то z = 0, и обратно.
лежит на плоскости Oyz, то х = 0; если на плоскости Ozx, то у = 0; если же на плоскости Оху, то z = 0, и обратно.
Длина и направление вектора
Пусть в пространстве Oxyz задан вектор а. Проекции этого вектора на оси координат

называются координатами вектора а; при этом вектор мы будем записывать так: 
Так как вектор а свободный, то его можно рассматривать как радиус-вектор точки  . Отсюда получаем длину вектора
. Отсюда получаем длину вектора

т.е. модуль вектора равен корню квадратному из суммы квадратов его координат.
Направляющие косинусы вектора а определяются из уравнений

причем

т.е. сумма квадратов направляющих косинусов вектора равна единице. Направляющие косинусы ненулевого вектора однозначно определяют его направление. Следовательно, вектор полностью характеризуется своими координатами.
Пример №24
Найти длину и направление вектора а = {1, 2, -2}.
Решение:
Имеем

Отсюда
Таким образом, вектор а образует острые углы с координатными осями Ох и Оу и тупой угол с координатной осью Ог.
Расстояние между двумя точками пространства
Пусть  — начальная точка отрезка
— начальная точка отрезка  и
и 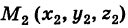 — конечная точка его. Точки
— конечная точка его. Точки  можно задать их радиусами-векторами
можно задать их радиусами-векторами  и
и  (рис. 181).
(рис. 181).
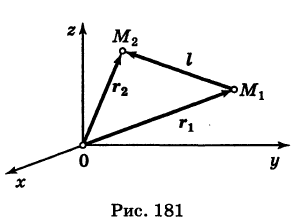
Рассматривая вектор  , из
, из  будем иметь
будем иметь

Проецируя это векторное равенство на оси координат и учитывая свойства проекций, получаем

Таким образом, проекции направленного отрезка на оси координат равны разностям соответствующих координат конца и начала отрезка.
Из формул (2) получаем длину отрезка (или, иначе, расстояние между двумя точками  )
)

Итак, расстояние между двумя точками пространства равно корню квадратному из квадратов разностей одноименных координат этих точек.
Пример №25
Ракета из пункта М1 (10, -20, 0) прямолинейно переместилась в пункт М2 (-30, -50, 40) (расстояния даны в километрах). Найти путь пройденный ракетой.
Решение:
На основании формулы (3) имеем

Заметим, что, найдя направляющие косинусы вектора перемещения  , нетрудно определить направление движения ракеты.
, нетрудно определить направление движения ракеты.
Действие над векторами, заданными в координатной форме
Пусть вектор  задан своими проекциями на оси координат Ox, Оу, Oz.
задан своими проекциями на оси координат Ox, Оу, Oz.
Построим параллелепипед (рис. 182), диагональю которого является вектор а, а ребрами служат компоненты его  относительно соответствующих координатных осей. Имеем разложение
относительно соответствующих координатных осей. Имеем разложение

Если ввести единичные векторы (орты) i, j, k, направленные по осям координат, то на основании связи между компонентами вектора и его проекциями будем иметь

Подставляя эти выражения в равенство (1), получаем координатную форму вектора

Заметим, что разложение (3) для вектора а единственно. Действительно, пусть

Отсюда, вычитая из равенства (3) равенство (3′) и пользуясь перемести -тельным и сочетательным свойствами суммы векторов, а также свойствами разности векторов, будем иметь

Если хотя бы один из коэффициентов при ортах i, j и k был отличен от нуля, то векторы i, j и k были бы компланарны, что неверно. Поэтому  и единственность разложения (3) доказана.
и единственность разложения (3) доказана.
Если  то, очевидно, также имеем
то, очевидно, также имеем

Рассмотренные выше линейные операции над векторами можно теперь записать в следующем виде:

или короче:  . Таким образом, при умножении вектора на скаляр координаты вектора умножаются на этот скаляр;
. Таким образом, при умножении вектора на скаляр координаты вектора умножаются на этот скаляр;

или кратко: 
Таким образом, при сложении (или вычитании) векторов их одноименные координаты складываются (или вычитаются):
Пример №26
Найти равнодействующую F двух сил

и ее направление.
Решение:
Имеем  . Отсюда
. Отсюда

где  — направляющие косинусы равнодействующей F.
— направляющие косинусы равнодействующей F.
Скалярное произведение векторов
Определение: Под скалярным произведением двух векторов а и b понимается число, равное произведению длин этих векторов на косинус угла между ними, т. е. в обычных обозначениях:

где 
Заметим, что в формуле (1) скалярное произведение можно еще записывать как ab, опуская точку. Так как (рис. 183)

то можно записать

т.е. скалярное произведение двух векторов равно длине одного из них, умноженной на проекцию другого на ось с направлением первого.
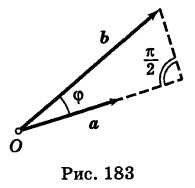
Физический смысл скалярного произведения
Пусть постоянная сила F обеспечивает прямолинейное перемещение  материальной точки. Если сила F образует угол ф с перемещением s (рис. 184), то из физики известно, что работа силы F при перемещении s равна
материальной точки. Если сила F образует угол ф с перемещением s (рис. 184), то из физики известно, что работа силы F при перемещении s равна
На основании формулы (1) имеем

Таким образом, работа постоянной силы при прямолинейном перемещении ее м точки приложения равна скалярному произведению вектора силы на вектор перемещения.
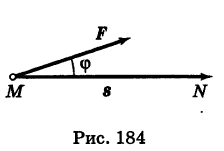
Скалярное произведение векторов обладает следующими основными свойствами.
1)Скалярное произведение двух векторов не зависит от порядка этих сомножителей (переместительное свойство):

Эта формула непосредственно следует из формулы (1).
2)Для трех векторов а, b и с справедливо распределительное свойство

т. е. при скалярном умножении суммы векторов на вектор можно «раскрыть скобки».
Действительно, на основании формул (2), учитывая свойства проекций векторов, имеем

3)Скалярный квадрат вектора равен квадрату модуля этого вектора, т.е.

Действительно,

Отсюда для модуля вектора получаем формулу

4)Скалярный множитель можно выносить за знак скалярного произведения, т.е.

Это свойство также легко получается из (1).
5)Скалярное произведение линейной комбинации векторов на произвольный вектор равно такой же линейной комбинации данных векторов на этот вектор, т.е.

( — скаляры).
— скаляры).
Это — очевидное следствие 2) и 4).
Из определения (1) вытекает, что косинус угла  между двумя ненулевыми векторами а и b равен
между двумя ненулевыми векторами а и b равен

Из формулы (8) получаем, что два вектора а и b перпендикулярны (ортогональны), т. е.  , тогда и только тогда, когда
, тогда и только тогда, когда

Это утверждение справедливо также и в том случае, когда хотя бы один из векторов а или b нулевой.
Пример №27
Найти проекцию вектора а на вектор b. Обозначая через  угол между этими векторами, имеем
угол между этими векторами, имеем

где е = — орт вектора b
— орт вектора b
Скалярное произведение векторов в координатной форме
Пусть

Перемножая эти векторы как многочлены и учитывая соотношения

будем иметь

Таким образом, скалярное произведение векторов равно сумме парных произведений их одноименных координат. Отсюда, обозначая через ф угол между векторами а и b, получаем

Пример:
Определить угол ф между векторами а = { 1,+2, 3} и b ={-3, 2,-1}. На основании формулы (4) имеем

Отсюда 
Пусть векторы а и b коллинеарны (параллельны). Согласно условию коллинеарности,

где k — скаляр, что эквивалентно  или
или

Таким образом, векторы коллинеарны тогда и только тогда, когда их одноименные координаты пропорциональны.
Для перпендикулярных (ортогональных) векторов а и b имеем  и, следовательно, cos ф = 0 или, согласно формуле (4),
и, следовательно, cos ф = 0 или, согласно формуле (4),

Таким образом, два вектора перпендикулярны тогда и только тогда, когда сумма парных произведений их одноименных координат равна нулю.
Векторное произведение векторов
Напомним, что тройка а, b и с некомпланарных векторов называется правой (рис. 185, а) или левой (рис. 185, б), если она ориентирована по правилу правого винта или соответственно по правилу левого винта.
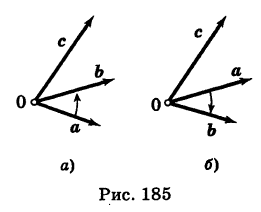
Заметим, что если в тройке некомпланарных векторов а, b, с переставить два вектора, то она изменит свою ориентацию, т. е. из правой сделается левой или наоборот.
В дальнейшем правую тройку мы будем считать стандартной.
Определение: Под векторным произведением двух векторов а и b понимается вектор

для которого:
1)модуль равен площади параллелограмма, построенного на данных векторах, т. е.

где  (рис. 186);
(рис. 186);
2)этот вектор перпендикулярен перемножаемым векторам (иначе говоря, перпендикулярен плоскости построенного на них параллелограмма), т. е.  ;
;
3)если векторы неколлинеарны, то векторы а, b, с образуют правую тройку векторов.
Укажем основные свойства векторного произведения.
1)При изменении порядка сомножителей векторное произведение меняет свой знак на обратный, сохраняя модуль, т. е.

Действительно, при перестановке векторов а и b площадь построенного на них параллелограмма остается неизменной, т. е.  . Однако тройка векторов
. Однако тройка векторов  является левой. Поэтому направление вектора
является левой. Поэтому направление вектора  противоположно направлению вектора
противоположно направлению вектора  (а и b неколлинеарны). Если а и b коллинеарны, то равенство (3) очевидно.
(а и b неколлинеарны). Если а и b коллинеарны, то равенство (3) очевидно.
Таким образом, векторное произведение двух векторов не обладает переместительным свойством.
2)Векторный квадрат равен нуль-вектору, т.е.

Это — очевидное следствие свойства 1).
3)Скалярный множитель можно выносить за знак векторного произведения, т.е. если  — скаляр, то
— скаляр, то

Это свойство непосредственно вытекает из смысла произведения вектора на скаляр и определения векторного произведения.
4)Для любых трех векторов а, b, с справедливо равенство

т.е. векторное произведение обладает распределительным свойством.
Пример:

Отсюда, в частности, имеем

т. е. площадь параллелограмма, построенного на диагоналях данного параллелограмма, равна удвоенной площади этого параллелограмма.
С помощью векторного произведения удобно формулировать легко проверяемый критерий коллинеарности двух векторов а и b:

Векторное произведение в координатной форме
Пусть

Перемножая векторно эти равенства и используя свойства векторного произведения, получим сумму девяти слагаемых:

Из определения векторного произведения следует, что для ортов  справедлива следующая «таблица умножения»:
справедлива следующая «таблица умножения»:

Поэтому из формулы (3) получаем
 (с сохранением порядка следования букв
(с сохранением порядка следования букв  ).
).
Для удобства запоминания формула (4) записывается в виде определителя третьего порядка (см. гл. XVII) 
Из формулы (4) вытекает, что

Геометрически формула (6) дает квадрат площади параллелограмма, построенного на векторах  .
.
Пример №28
Найти площадь треугольника с вершинами А (1, 1, 0), В (1,0, 1) и С (0, 1, 1).
Решение:
Площадь S треугольника ABC равна 1/2 площади параллелограмма, построенного на векторах  (рис. 187). Используя формулы для проекций направленных отрезков, имеем
(рис. 187). Используя формулы для проекций направленных отрезков, имеем 
 отсюда
отсюда 
Следовательно,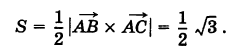
Смешанное произведение векторов
Определение: Под смешанным (или векторно-скалярным) произведением векторов  понимается число
понимается число

Построим параллелепипед П (рис. 188), ребрами которого, исходящими из общей вершины О, являются векторы .
Тогда  представляет собой площадь параллелограмма, построенного на векторах
представляет собой площадь параллелограмма, построенного на векторах  , т.е. площадь основания параллелепипеда.
, т.е. площадь основания параллелепипеда. 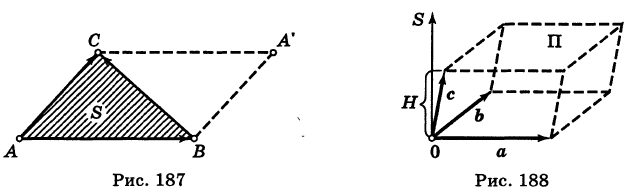
Высота этого параллелепипеда  , очевидно, равна
, очевидно, равна

где  и знак плюс соответствует острому углу
и знак плюс соответствует острому углу  , а знак минус — тупому углу ф. В первом случае векторы
, а знак минус — тупому углу ф. В первом случае векторы  образуют правую тройку, а во втором — левую тройку.
образуют правую тройку, а во втором — левую тройку.
На основании определения скалярного произведения имеем

где V — объем параллелепипеда, построенного на векторах . Отсюда
т. е. смешанное произведение трех векторов равно объему V параллелепипед а у построенного на этих векторах, взятому со знаком плюсу если эти векторы образуют правую тройку, и со знаком минус, если они образуют левую тройку.
Справедливы следующие основные свойства смешанного произведения векторов.
1)Смешанное произведение не меняется при циклической перестановке его сомножителей, т.е.

Действительно, в этом случае не изменяется ни объем параллелепипеда П, ни ориентация его ребер.
2)При перестановке двух соседних множителей смешанное произведение меняет свой знак на обратный, т. е.

Это следует из того, что перестановка соседних множителей, сохраняя объем параллелепипеда, изменяет ориентацию тройки векторов, т.е. правая тройка переходит в левую, а левая — в правую.
С помощью смешанного произведения получаем необходимое и достаточное условие компланарности трех векторов :
abc = 0
(объем параллелепипеда равен нулю). Если
то, используя выражения в координатах для векторного и скалярного произведений векторов, получаем
 т. e.
т. e. 
- Прямая — понятие, виды и её свойства
- Плоскость — определение, виды и правила
- Кривые второго порядка
- Евклидово пространство
- Логарифм — формулы, свойства и примеры
- Корень из числа — нахождение и вычисление
- Теория множеств — виды, операции и примеры
- Числовые множества
Вектором называется направленный отрезок. Вектор обозначается либо символом  (
( — точка начала,
— точка начала,  — точка конца вектора), либо
— точка конца вектора), либо  . В математике обычно рассматриваются свободные векторы, то есть векторы, точка приложения которых может быть выбрана произвольно.
. В математике обычно рассматриваются свободные векторы, то есть векторы, точка приложения которых может быть выбрана произвольно.
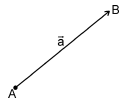
2. Длиной (модулем) вектора называется длина отрезка  . Модуль вектора обозначается
. Модуль вектора обозначается  .
.
3.Вектор называется единичным, если его длина равна «1»; единичный вектор  направления вектора называется ортом вектора и определяется по формуле
направления вектора называется ортом вектора и определяется по формуле  .
.
4. Вектор называется нулевым, если его начало и конец совпадают  ; любое направление можно считать направлением нулевого вектора.
; любое направление можно считать направлением нулевого вектора.
5. Векторы называются коллинеарными, если они лежат либо на одной прямой, либо на параллельных прямых. Коллинеарность векторов обозначается:  . Необходимым и достаточным условием коллинеарности векторов и
. Необходимым и достаточным условием коллинеарности векторов и  является существование такого числа
является существование такого числа  , что
, что  .
.
6. Два вектора называются равными, если они коллинеарны, имеют одинаковую длину и направление.
7. Вектор  называется противоположным вектору , если модули их равны, а направления противоположны.
называется противоположным вектору , если модули их равны, а направления противоположны.
8. Векторы называются компланарными, если они лежат в одной плоскости или в параллельных плоскостях.
Для решения задач необходимо уметь выполнять линейные операции над вектором в геометрической форме, то есть над вектором, как над
направленным отрезком: сложение, вычитание векторов и умножение вектора на число.
9. Сложение двух векторов можно выполнить по правилу параллелограмма (рис. 1) или по правилу треугольника (рис. 2).
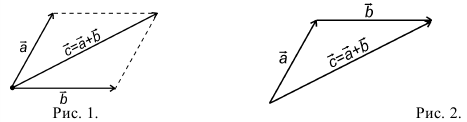
При сложении более двух векторов, лежащих в одной плоскости, используется правило «замыкающей линии многоугольника» (рис. 3).
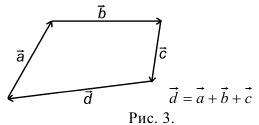
При сложении трех некомпланарных векторов удобно пользоваться правилом «параллелепипеда» (рис. 4).
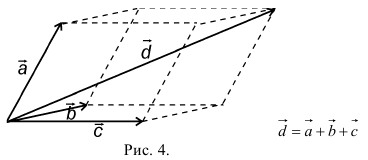
10. Действие вычитания двух векторов связано с действием сложения (рис.5).
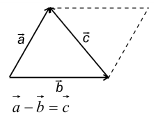
Разностью двух векторов называется вектор, проведенный из конца вычитаемого в конец уменьшаемого. Заметим, что разностью является вектор, служащий второй диагональю параллелограмма.
Разность можно также представить в виде сложения с противоположным вектором (рис. 6).
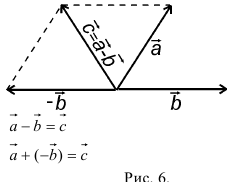
11. Произведением вектора на число называется вектор  , который имеет :
, который имеет :
12. Для решения задач полезно знать также следующие законы и свойства:

Примеры задач решаемых с применением векторной алгебры
Задача:
Пусть даны точки 

1) Найти координаты векторов

2) Написать разложение этих векторов по базису 
3) Найти длины этих векторов
4) Найти скалярное произведение 
5) Найти угол между векторами  и
и  .
.
6) Найти разложение вектора по базису и 
Решение:
1) Вычислим координаты векторов и  (нужно из координат точки его конца вычесть координаты его начала):
(нужно из координат точки его конца вычесть координаты его начала):

 , аналогично,
, аналогично, 
 и
и 
2) 
3)

4) Для вычисления угла между векторами воспользуемся формулой:
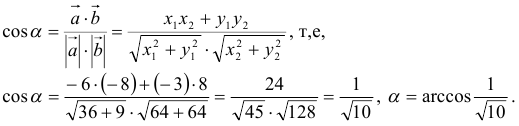
5) Разложить вектор по векторам и — это значит представить вектор в виде линейной комбинации векторов и , т. е.
 , где
, где  . Имеем
. Имеем 

 , но у равных векторов соответственно равны координаты, следовательно, получим систему, из которой найдем
, но у равных векторов соответственно равны координаты, следовательно, получим систему, из которой найдем  и
и  .
.

Задача:
а). Даны векторы  и
и  в некотором базисе. Показать, что векторы
в некотором базисе. Показать, что векторы  образуют базис и найти координаты вектора
образуют базис и найти координаты вектора  в этом базисе.
в этом базисе.
Решение:
Три вектора образуют базис, если  .
.

Найдем координаты вектора в базисе  и
и  .
.

Два вектора равны, если их соответствующие координаты равны.
Решим систему методом Крамера:
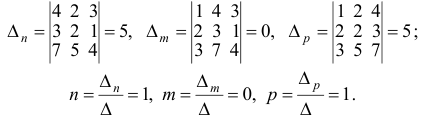
Ответ:  .
.
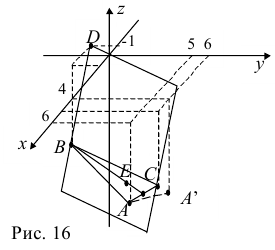
Задача:
Даны координаты вершин тетраэдра 
 и
и  . Найти: 1) координаты точки пересечения медиан треугольника
. Найти: 1) координаты точки пересечения медиан треугольника  ; 2) уравнение прямой, проходящей через вершину
; 2) уравнение прямой, проходящей через вершину  параллельно медиане, проведенной из вершины
параллельно медиане, проведенной из вершины  треугольника ; 3) координаты точки, симметричной точке относительно плоскости
треугольника ; 3) координаты точки, симметричной точке относительно плоскости  . Сделать чертёж.
. Сделать чертёж.
Решение:
1) Найдем координаты т.  середины отрезка
середины отрезка  (рис. 16):
(рис. 16): 


Точка  пересечения медиан треугольника делит медиану
пересечения медиан треугольника делит медиану  в отношении
в отношении  , считая от вершины . Найдем координаты точки :
, считая от вершины . Найдем координаты точки :
2) Найдем направляющий вектор прямой 
 . Уравнение прямой, проходящей через вершину параллельно прямой
. Уравнение прямой, проходящей через вершину параллельно прямой  :
:

3) Найдем уравнение плоскости :

Найдем каноническое уравнение прямой, перпендикулярной плоскости и проходящей через т. :  . Запишем каноническое уравнение прямой в параметрическом виде:
. Запишем каноническое уравнение прямой в параметрическом виде: 
 .
.
Найдем координаты точки  пересечения плоскости и найденной прямой:
пересечения плоскости и найденной прямой: 

Координаты точки  симметричной точке относительно плоскости —
симметричной точке относительно плоскости —  .
.
Ответ: 1) координаты точки пересечения медиан  уравнение прямой
уравнение прямой  ; 3) координаты симметричном точки .
; 3) координаты симметричном точки .
На этой странице размещён краткий курс лекций по высшей математике для заочников с теорией, формулами и примерами решения задач:
Высшая математика краткий курс лекций для заочников
Возможно вам будут полезны эти страницы:
Векторная алгебра — решение заданий и задач по всем темам с вычислением
Понятие вектора. Линейные операции над векторами
1°. Любые две точки  пространства, если они упорядочены (например, А является первой, а В — второй точкой), определяют отрезок вместе с выбранным направлением (а именно, от A к В). Направленный отрезок называется вектором. Вектор с началом в A и концом в В обозначается
пространства, если они упорядочены (например, А является первой, а В — второй точкой), определяют отрезок вместе с выбранным направлением (а именно, от A к В). Направленный отрезок называется вектором. Вектор с началом в A и концом в В обозначается  или
или  Длина вектора, обозначаемая , АВ или
Длина вектора, обозначаемая , АВ или  а, называется также модулем вектора. Чтобы найти координаты вектора, нужно из координат конца вектора вычесть одноименные координаты начала:
а, называется также модулем вектора. Чтобы найти координаты вектора, нужно из координат конца вектора вычесть одноименные координаты начала:  Тогда длина вектора найдется так:
Тогда длина вектора найдется так:
Векторы, расположенные на одной прямой или на параллельных прямых, называются коллинеарными.
Два вектора  называются равными, если они коллинеарны, имеют одинаковые модули и направления. В этом случае пишут
называются равными, если они коллинеарны, имеют одинаковые модули и направления. В этом случае пишут Равные векторы имеют равные координаты.
Равные векторы имеют равные координаты.
Векторы называются противоположными, если они коллинеарны, имеют одинаковые длины и противоположные направления: 
Вектор называется нулевым, если его модуль равен нулю, и обозначается 
2°. Линейными называются действия сложения, вычитания векторов и умножения вектора на число.
1.Если начало  совмещено с концом
совмещено с концом  то начало
то начало  совпадает с началом а конец — с концом (рис. 3.1).
совпадает с началом а конец — с концом (рис. 3.1).
2.Если начала векторов совмещены, то начало  совпадает с концом , а конец совпадает с концом (рис. 3.2).
совпадает с концом , а конец совпадает с концом (рис. 3.2).
3.При умножении вектора на число (скаляр)
на число (скаляр)  длина вектора умножается на
длина вектора умножается на  , а направление сохраняется, если
, а направление сохраняется, если и изменяется на противоположное, если
и изменяется на противоположное, если  (рис. 3.3).
(рис. 3.3).
Вектор  называется ортом, или единичным вектором вектора его длина равна единице:
называется ортом, или единичным вектором вектора его длина равна единице:
3°. Запись ci —  означает, что вектор имеет координаты
означает, что вектор имеет координаты или разложен по базису
или разложен по базису  — орты осей Ох, Оу и Oz пространственной системы координат Oxyz). При этом
— орты осей Ох, Оу и Oz пространственной системы координат Oxyz). При этом

4°. Числа  называются направляющими косинусами вектора
называются направляющими косинусами вектора  — углы между вектором и координатными осями Ох, Оу, Oz соответственно. Единичный вектор
— углы между вектором и координатными осями Ох, Оу, Oz соответственно. Единичный вектор  — орт вектора . Для любого вектора справедливо:
— орт вектора . Для любого вектора справедливо: 
5°. Линейные операции над векторами, которые заданы своими координатами, определяются так: пусть  тогда
тогда

Следовательно, при сложении векторов складываются их соответствующие координаты, а при умножении вектора на число умножаются на число все координаты вектора.
6°. Необходимое и достаточное условие коллинеарности векторов , устанавливаемое равенством  может быть записано соотношениями
может быть записано соотношениями  из которых следует пропорциональность их координат:
из которых следует пропорциональность их координат: 
Если один из членов какого-нибудь из этих отношений равен нулю, то и второй член того же отношения должен быть нулем. Геометрически это значит, что в этом случае оба вектора перпендикулярны соответствующей координатной оси (например, если  то векторы
то векторы  ).
).
7°. Система векторов  называется линейно независимой, если равенство
называется линейно независимой, если равенство

( — действительные числа) возможно только при
— действительные числа) возможно только при  Если же равенство (1) возможно при некотором нетривиальном наборе
Если же равенство (1) возможно при некотором нетривиальном наборе  то система этих векторов называется линейно зависимой. Любой вектор линейно зависимой системы линейно выражается через остальные.
то система этих векторов называется линейно зависимой. Любой вектор линейно зависимой системы линейно выражается через остальные.
Примеры с решениями
Пример:
Доказать, что треугольник с вершинами в точках A(1,2), B(2,5), С(3,4) прямоугольный.
Решение:
Построим векторы, совпадающие со сторонами треугольника (см. п. 1°):  (рис. 3.4).
(рис. 3.4).

Найдем длины сторон: 

Нетрудно видеть, что  Следовательно, треугольник ABC прямоугольный с гипотенузой
Следовательно, треугольник ABC прямоугольный с гипотенузой  и катетами
и катетами 
Пример:
Проверить, что точки А( 2,-4,3), В(5, —2,9), С( 7,4,6) и D(6,8, -3) являются вершинами трапеции.
Решение:
Составим векторы-стороны с целью обнаружения коллинеарности векторов (в трапеции ВС || AD) (рис. 3.5):

Имеем  значит, ABCD — трапеция.
значит, ABCD — трапеция.
Пример:
Найти орт и направляющие косинусы вектора 
Решение:
Имеем  В соответствии с п. 3°, 4°
В соответствии с п. 3°, 4°
 и направляющие косинусы вектора
и направляющие косинусы вектора 
 причем
причем 
Пример:
Определить точку В, которая является концом вектора  , если его начало совпадает с точкой
, если его начало совпадает с точкой
Решение:
Пусть точка В имеет координаты B(x,y,z) (рис. 3.6). Тогда координа- ^ ты вектора (п. 1°)

Следовательно,  Ответ. В(5, -5,3).
Ответ. В(5, -5,3).
Пример:
Вектор  разложить по векторам
разложить по векторам

Решение:
Необходимо найти такие числа х, у, z, что  т.е.
т.е.

Имея в виду, что при сложении векторов складываются их координаты и равные векторы имеют равные координаты, приходим к системе уравнений
из которой
Ответ. 
Пример:
Показать, что система векторов 
 линейно независима.
линейно независима.
Решение:
В данном случае равенство (1) имеет вид  , или
, или  Отсюда получаем систему уравнений
Отсюда получаем систему уравнений
из которой следует, что  Это подтверждает линейную независимость данных векторов.
Это подтверждает линейную независимость данных векторов.
Пример:
Показать, что система векторов 
 линейно зависима.
линейно зависима.
Решение:
Равенство (1) равносильно системе уравнений
Она имеет ненулевое решение, например,  Таким образом,
Таким образом,  Отсюда видно, что
Отсюда видно, что  т.е. вектор
т.е. вектор  линейно выражается через
линейно выражается через  Очевидно, что
Очевидно, что  можно выразить через
можно выразить через  — через
— через 
Скалярное произведение векторов
1°. Скалярным произведением двух ненулевых векторов а и b называется число, равное произведению их длин на косинус угла  между ними:
между ними:

Из  (рис. 3.7) имеем
(рис. 3.7) имеем (
( — проекция вектора на направление вектора ).
— проекция вектора на направление вектора ).
Итак, 
2°. Если

т.е. скалярное произведение векторов равно сумме произведений одноименных координат этих векторов.
При этом  если же
если же  , т. е.
, т. е.  поскольку cos 90° = 0 (условие перпендикулярности двух векторов).
поскольку cos 90° = 0 (условие перпендикулярности двух векторов).
3°. Из определения скалярного произведения следует формула для вычисления угла между двумя векторами:

Примеры с решениями
Пример:
Перпендикулярны ли векторы  если
если 
Решение:
Условие перпендикулярности векторов (п. 2°)  в нашем случае
в нашем случае

Ответ. Да.
Пример:
Найти проекцию вектора  на направление вектора
на направление вектора 
Решение:
Имеем  (п. 1°). Подставив сюда выражение для
(п. 1°). Подставив сюда выражение для  из п. 3°, получим
из п. 3°, получим

Ответ 
Пример:
Зная векторы, совпадающие с двумя сторонами:  и
и  найти внутренние углы треугольника ABC.
найти внутренние углы треугольника ABC.
Решение:
Имеем (рис. 3.8)


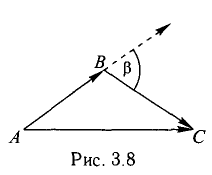
При помощи таблиц находим  Для нахождения других углов нам понадобится вектор
Для нахождения других углов нам понадобится вектор  который является суммой
который является суммой  :
:  поэтому
поэтому 
Ответ. 123° 10′, 19°29′, 37°21′.
Пример:
Найти координаты вектора  если
если  где
где  и
и 
Решение:
На рис. 3.9 имеем Из условий перпендикулярности векторов (п. 2°) имеем  Положим
Положим  Условие задачи перепишем в виде Рис. 3.9 системы
Условие задачи перепишем в виде Рис. 3.9 системы
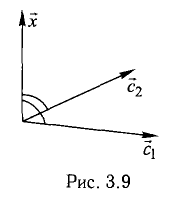
Векторное произведение векторов
1°. Векторы  приведенные к одному началу, образуют правую (левую) тройку при условии: если смотреть из конца вектора
приведенные к одному началу, образуют правую (левую) тройку при условии: если смотреть из конца вектора  на плоскость векторов
на плоскость векторов  то кратчайший поворот от
то кратчайший поворот от  совершается против (по) часовой стрелки (рис. 3.10).
совершается против (по) часовой стрелки (рис. 3.10).
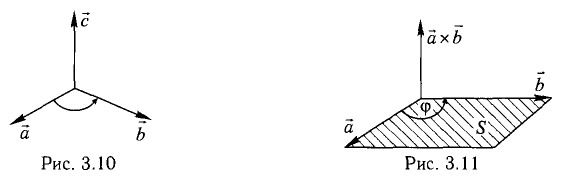
2°. Векторным произведением ненулевых векторов называется вектор , обозначаемый  удовлетворяющий следующим трем условиям.
удовлетворяющий следующим трем условиям.
1) вектор перпендикулярен плоскости векторов
вектор перпендикулярен плоскости векторов 
2) Вектор  направлен так, что векторы
направлен так, что векторы  образуют правую тройку.
образуют правую тройку.
3)  т.е. его длина численно равна площади параллелограмма, построенного на векторах (рис. 3.11), таким образом,
т.е. его длина численно равна площади параллелограмма, построенного на векторах (рис. 3.11), таким образом, 
Если векторы коллинеарны, то под понимается нулевой вектор:
3°. Если известны координаты векторов-сомножителей  то для отыскания координат векторного произведения служит формула
то для отыскания координат векторного произведения служит формула
в которой определитель следует разложить по элементам первой строки.
Примеры с решениями
Пример:
Найти площадь треугольника, вершины которого находятся в точках А(1,2,3), В{3,2,1), С(1,0,1).
Решение:
Найдем координаты векторов  Определим координаты векторного произведения
Определим координаты векторного произведения  (рис. 3.12):
(рис. 3.12):
Найдем длину этого вектора, которая равна численно площади параллелограмма S (п. 2°):  Площадь треугольника
Площадь треугольника  равна
равна 
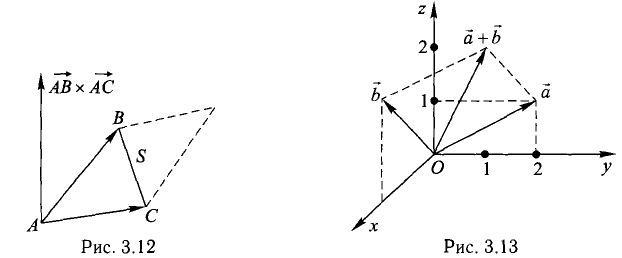
Пример:
Построить параллелограмм на векторах  и
и  вычислить его площадь и высоту, опущенную на .
вычислить его площадь и высоту, опущенную на .
Сделаем чертеж (рис. 3.13). Имеем  Отдельно вычисляем векторное произведение:
Отдельно вычисляем векторное произведение:
Следовательно,

Смешанное произведение векторов
1°. Смешанным произведением трех ненулевых векторов  называется число, равное скалярному произведению двух векторов, один из которых — векторное произведение , а другой — вектор . Обозначение:
называется число, равное скалярному произведению двух векторов, один из которых — векторное произведение , а другой — вектор . Обозначение:  Если образуют правую тройку, то
Если образуют правую тройку, то  Если образуют левую тройку, то
Если образуют левую тройку, то 
Модуль смешанного произведения векторов равен объему параллелепипеда (рис. 3.14), построенного на этих векторах, Условие
Условие  равносильно тому, что векторы расположены в одной плоскости, т.е. компланарны. Имеет место равенство
равносильно тому, что векторы расположены в одной плоскости, т.е. компланарны. Имеет место равенство
Объем тетраэдра с вершинами в точках 
 можно вычислить по формуле
можно вычислить по формуле  где
где
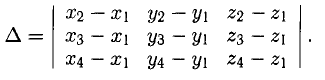
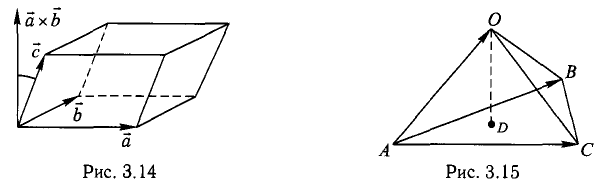
2°. Условие  равносильно условию линейной независимости , а тогда любой вектор
равносильно условию линейной независимости , а тогда любой вектор  линейно выражается через них, т. е.
линейно выражается через них, т. е.  Для определения х, у, z следует решить соответствующую систему линейных уравнений
Для определения х, у, z следует решить соответствующую систему линейных уравнений
Примеры с решениями
Пример:
Найти объем параллелепипеда, построенного на векторах 
Решение:
Искомый объем  Поскольку
Поскольку
Пример:
В точках 0(0,0,0), А(5,2,0), В(2,5,0) и С(1,2,4) находятся вершины пирамиды. Вычислить ее объем, площадь грани ABC и высоту пирамиды, опущенную на эту грань.
Решение:
1) Сделаем схематический чертеж (рис. 3.15).
2) Введем векторы 
 .Объем пирамиды ОАВС (тетраэда) равен
.Объем пирамиды ОАВС (тетраэда) равен

3) Площадь грани ABC

4) Объем пирамиды  отсюда
отсюда 
Ответ. 
Основные понятия векторной алгебры
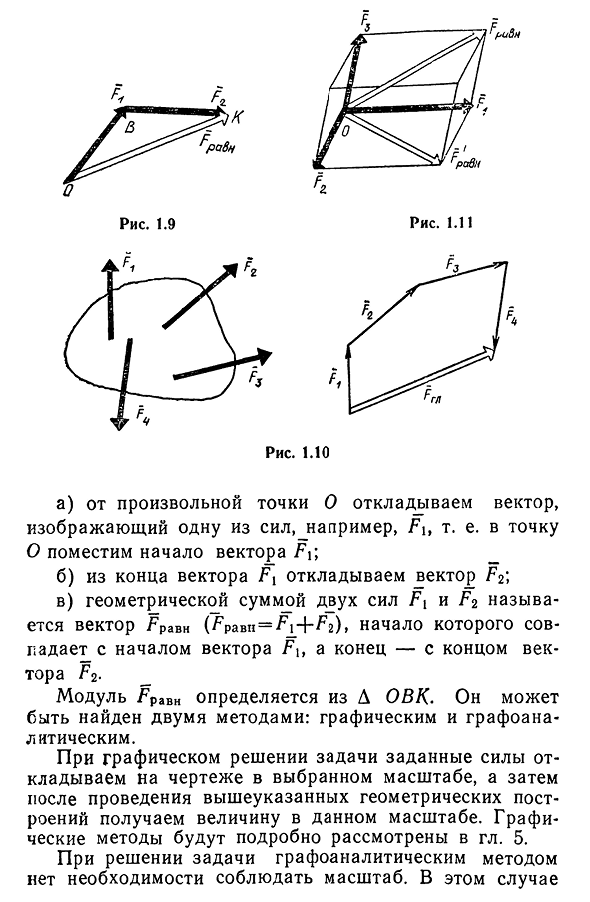
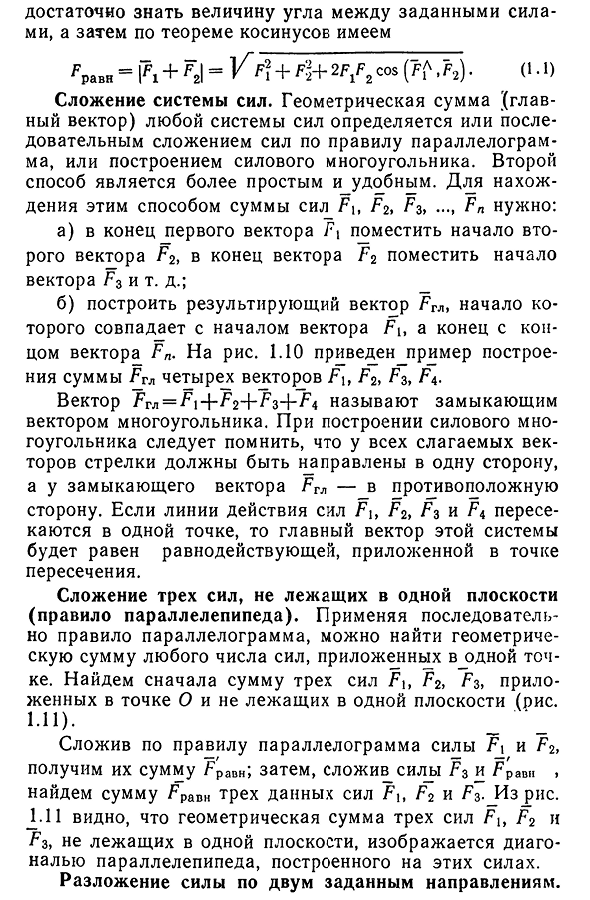
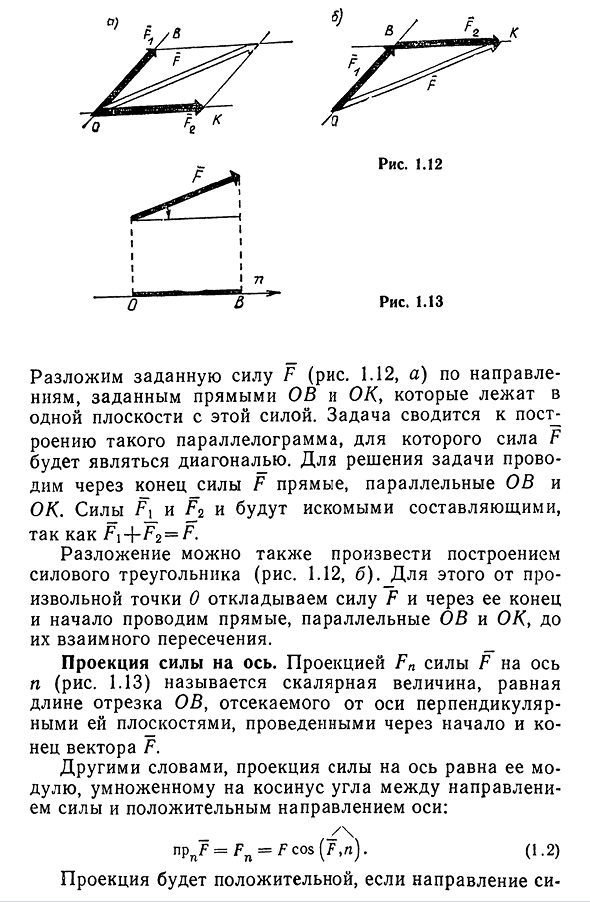
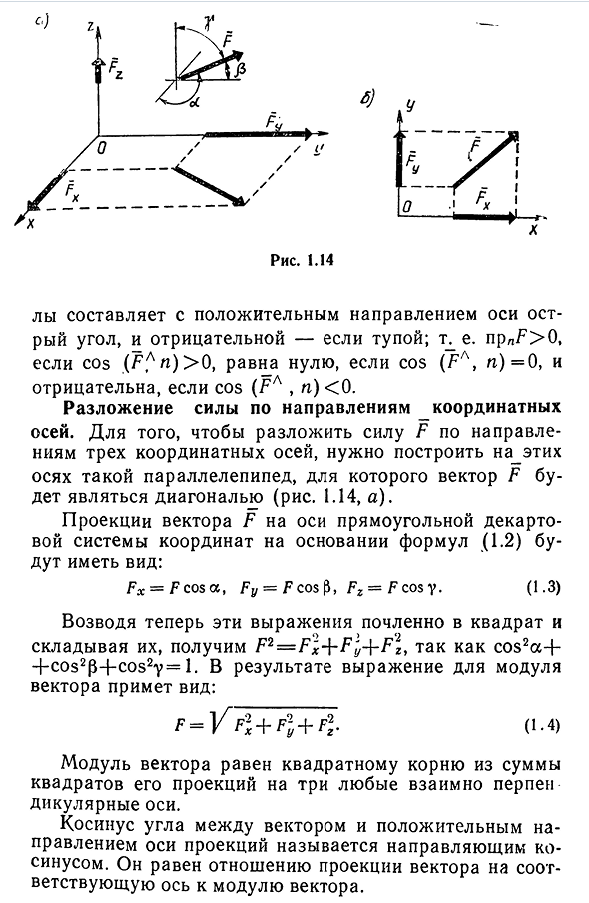
Прямоугольные декартовы координаты
Координатная ось
Пусть на плоскости или в пространстве задана произвольная прямая L: Ясно, что по этой прямой L сы можем перемещаться в oднoм из двух противоположных направлений. Выбор любого (одного) из этих направлений будем называть ориентацией прямой L.
Оnределение:
Прямая с заданной на ней ориентацией называется осью. На чертеже ориентация оси указывается стрелкой (рис. 1 ) . Фиксируем на оси  некоторую точку О и выберем какой-нибудь отрезок а, доложив по определению его длину равной единице (рис. 2).
некоторую точку О и выберем какой-нибудь отрезок а, доложив по определению его длину равной единице (рис. 2).
Пусть М — произвольная точка оси . Поставим этой точке в соответствие число х по следующему прав илу: х равно расстоюiию между точками О и М, взятому со знаком плюс или со знаком минус н зависимости от того, совпадает ли направление движения от точки О к точке М с заданным направлением или противоположно ему (рис. 3).

Оnределение:
Ось с точкой начала отсчета О и масштабными отрезками а называется координатной осью, а число х, вычисляемое по указанному правилу, называется координатой точки М. Обозначение: М (х).
Прямоугольные декартовы координаты на плоскости
Пусть П — произвольная плоскость. Возьмем на ней некоторую точку О и проведем через эту точку взаимно перпендикулярные прямые L 1 и L 2. Зададим на каждой из nрямых L 1 и L 2 ориентацию и выберем единый масштабный отрезок а. Тогда эти прямые nревратятся в координатные оси с общей точкой отсчета О (рис. 4).
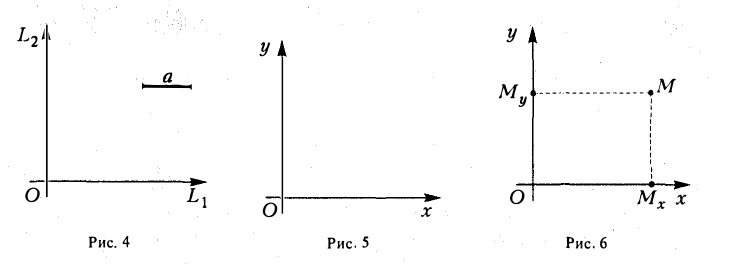
Назовем одну из координатных осей осью абсцисс (осью Ох), друrую —осью ординат (осью Оу) (рис. 5). Точка О называется началом координат. Пусть М — произвольная точка плоскости П (рис. 6). Проведем через точку М прямые, перпендикулярные координатным осям, и поставим ей в соответствие упорядоченную пару чисел (х, у) по следующему nравилу:

Числа х и у называются прямоугольными декартовыми при этом х называется ее абсциссой, а у — ординатой. координатами точки М; Обозначение: М(х, у). Чтобы кратко охарактеризовать описанную конструкцию, говорят, что на плоскости П задана прямоугольная декартова система координат Ох у. Координатные оси разбивают плоскость на четыре части, называемые четвертями или квадрантами. На рисунке и в таблице показано, как эти квадранты нумеруются (рис. 7).
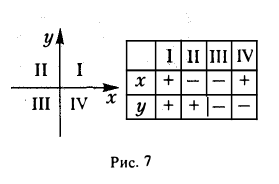
Замечание:
Масштабные от резки на координатных осях могут быть и разной длины. В этом случае координатная система называется просто прямоугольной.
Прямоугольные декартовы координаты в пространстве
Возьмем в пространстве некоторую точку О и проведем через нее три взаимно перпендикулярные прямые L 1 , L 2 и L 3 . Выберем на каждой из nрямых ориентацию и единый масштаб. Прямые L 1 , L 2 и L 3 превратятся в координатные оси с общей точкой отсчета О (рис. 8).
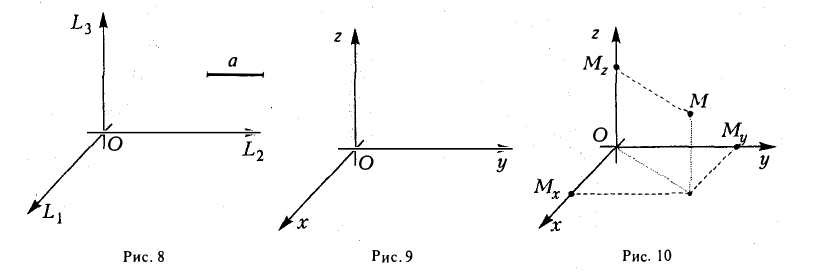
Назовем одну из этих осей осью абсцисс (осью Ох), вторую — осью ординат (осью Оу) и третью — осью аппликат (осью Oz) (рис. 9). Точка О называется началом координат. Пусть М — nроизвольная точка (рис. 10). Проведем через точку М nлоскости, перпендикулярные координатным осям, и поставим ей в соответстnие упорядоченную тройку чисел (х, у, z) по следующему правилу:
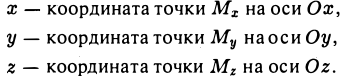
Числа х, у и z называются прямоугольными декартовыми координатами точки М; при этом х называется абсциссой точки М, у — ее ординатой, а z —аппликатой. Обозначение: М(х, у, z). Таким образом, в пространстве введена прямоугольная декартова система координат.
Оnределение:
Плоскость, проходящая через любую пару координатных осей, называется координатной плоскостью.
Координатных плоскостей три: Оху, Oyz и Oxz. Эти плоскости разбивают пространство на восемь частей — октантов. 1 .4. Простейшие задачи аналитической геометрии А. Расстояние между точками Пусть М 1 (х 1 ) и М 2 (х 2 )- две точки на координатной оси. Тогда расстояние d между ними вычисляется по формуле

Если на плоскости задана прямоугольная декартова система координат Оху, то расстояние d между любыми двумя точками М 1 (х 1 , у1 и М2 (х2 , y2) вычисляется по следующей формуле

Рассмотрим прямоугольный треугольник ∆MM1M2 (pиc. l l). По теореме Пифагора

Так как расстояние d между точками M 1 и M 2 равно длине отрезка M1M2 а |M1M| = |x 2 — x 1|, |MM2| = |y 2 — y 1|, то отсюда получаем, что

Замечая, что

,и извлекая из обеих частей равенства квадратный корень, приходим к требуемой формуле .
Замечание:
Расстояние между точками  в пространстве вычисляется по следующей формуле
в пространстве вычисляется по следующей формуле

Задача:
Написать уравнение окружности радиуса т с центром в точке Р(а, b).
Пусть М(х, у) — точка окружности (рис. 12). Это означает, что |M P| = r. Заменим |M P|его выражением

и возведем обе части полученного равенства в квадрат:

Это есть каноническое уравнение окружности радиуса r с центром в точке Р(а, b) .
Задача:
Пусть F л (-с, 0) и F n (c, 0) -фиксированные точки плоскости, а -заданное число (а > с ≥ 0). Найти условие, которому удовлетворяют координаты х и у точки М, обладающей следующим свойством: сумма расстояний от точки М до Fл и до F n равна 2а.
Вычислим расстояния между точками М и F л и между точками М и F n . Имеем

(рис. 13). Отсюда

Перенесем второй корень в правую часть

Возводя обе части в квадрат, после простых преобразований получим

С целью дальнейших упрощений вновь возводим обе части в квадрат. В результате nриходим к равенству

Полагая b 2 = а 2 — с 2 и деля обе части nоследнего соотноwения на а 2 b2 , nолучаем уравнение эллипса

(см. главу 111) .
Деление отрезка в данном отношении:
Пусть М1 (х1 , y1) и М2 (х2 , y2) — различные точки плоскости. Пусть, далее, точка М(х, у) лежит на отрезке М1М2 и делит его в отношении λ 1 : λ 2 , т. е.
Требуется выразить координаты х и у этой точки через координаты концов отрезка М1М2 и числа λ 1 и λ 2 . Предположим сначала, что отрезок М1М2 не параллелен оси ординат Оу (рис. 14). Тогда
Так как

то из последних двух соотношений получаем, что
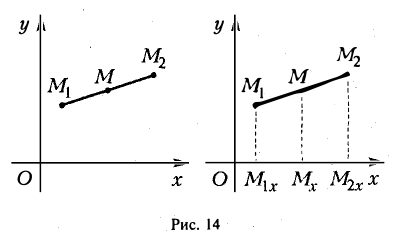
Точка М лежит между точками М1 и М2 , поэтому либо х 1 < х < х 2 , либо х 1 > х > х 2 . В любом из этих случаев разности х1 — х и х — х 2 имеют одинаковые знаки. Это позволяет переписать последнее равенство в следующей форме
Отсюда

В случае, когда отрезок М1М2 параллелен оси Оу, х 1 = х 2 = х. Заметим, что тот же результат дает формула (*), если nоложить в ней х 1 = х 2 . Справедливость формулы
доказывается аналогичным рассуждением .
Задача:
Найти координаты центра тяжести М треугольника с вершинами в точках . М1 ( х 1 , у 1 ), М2 ( х 2 , у 2 ) и М3 ( х 3 , у 3 ). Восnользуемся тем, что центр тяжести треугольника совпадает с точкой пересечения его медиан. Точка М делит каждую медиану в отношении 2 : 1, считая от вершины (рис. 15). Тем самым, ее координаты х и у можно найти по формулам

где х’ и у’ — координаты второго конца М’ медианы М3 М’. Так как М’ — середина отрезка М1М2, то

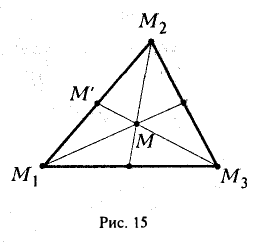
Полученные соотношения позволяют выразить координаты z и у центра тяжести М треугольника ∆М1М2М3 через координаты его вершин:

Замечание:
Если точка М(х,у,z ) делит отрезок с концами М1( х1, у1, z1) и М2( х2, у2, z2) в отношении λ1 : λ2, то ее координаты вычисляются по формулам

Полярные координаты
Предположим, что задана точка О, ось .содержащая точку О, и масштабный отрезок (эталон длины) (рис. 16).
Пусть М — произвольная точка плоскости, отличная от точки О (рис.17). Ее положение на плоскости однозначно определяется двумя числами: расстоянием г между точками О и М и отсчитываемым против часовой стрелки углом φ между положительным лучом оси и лучом ОМ с началом в точке О. Пару (г, φ) называют полярными координатами точки М; г — полярный радиус точки М , φ — полярный угол.
Точка О называется полюсом, — полярной осью.
Ясно, что Если точка М совпадаете полюсом, то считаем г = 0; полярный угол φ в этом случае не определен.
Если точка М совпадаете полюсом, то считаем г = 0; полярный угол φ в этом случае не определен.
Таким образом, на плоскости можно задать еще одну координатную систему — полярную.
Прямоугольную декартову систему координат Оху будем называть согласованной с заданной полярной, если начало координат 0(0, 0) — полюс, ось Ох — полярная ось, а ось Оу составляете осью Ох угол, равный . Тогда
. Тогда

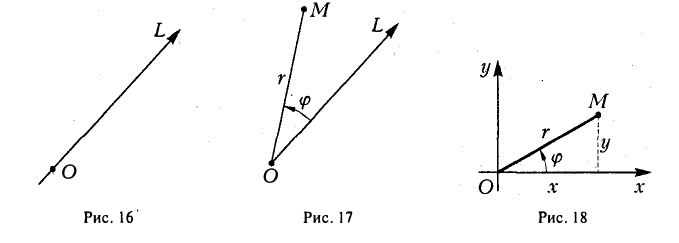
(рис.18). В свою очередь 
Пример:
Пусть R > О — заданное число. Множество точек плоскости, полярные координаты (г, <р) которых удовлетворяют равенству
r = R,
является окружностью радиуса R с центром в полюсе (рис. 19)
Определители 2-го и 3-го порядков
Пусть имеем четыре числа а11, а12, а21, а22 (читается — «а-один-один», «а-один-два», «а-два-один», «а-два-два»).
Определителем второго порядка называется число

Обозначение:
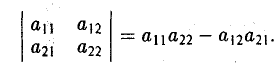
Числа а11, а12, а21, а22 называются элементами определителя; пары элементов а11, а12 и а21, а22 образуют строки определителя, а пары элементов а11, а21 и а12, а22 — его столбцы; пара элементов а11, а22 образует главную диагональ определителя, а пара а12, а21 — побочную диагональ.
Тем самым, для вычисления определителя второго порядка нужно из произведения а11, а22 элементов главной диагонали вычесть произведение а12, а21 элементов его побочной диагонали (рис. 20).
Пример:
Вычислить определитель

По правилу (1) имеем
С определителями второго порядка мы встречаемся уже при отыскании решения системы двух линейных алгебраических уравнений с двумя неизвестными
Решая эту систему методом исключения неизвестных при условии, что
находим

Пусгь теперь даны девять чисел aij (i = I, 2, 3; j = I, 2, 3).
Определителем третьего порядка называется число, обозначаемое символом
и вычисляемое по следующему правилу:

Первый индекс i элемента aij указывает номер строки, в которой он расположен, а второй индекс j — номер столбца.
Элементы а11, а22, а33 образуют главную диагональ определителя ∆, элементы а13, а22, а31 — побочную диагональ, элементы а13, а22, а31 — побочную диагональ.
Чтобы разобраться с распределением знаков в правой части формулы (2), обратим внимание на следующее: произведение элементов а11, а22, а33 главной диагонали входит в формулу со своим знаком, также как и произведение а11, а22, а33 и а11, а22, а33 элементов, расположенных в вершинах треугольников, основания которых параллельны главной диагонали (рис. 21); с другой стороны, произведение а13, а22, а31 элементов побочной диагонали, а также произведения а12, а21, а33 и а11, а23, а32 — с противоположным знаком (рис.22). Такой подход к вычислению определителя третьего порядка называется правилом треугольника.
Пример:
Вычислить определитель
Применяя правило треугольника, находим

Установим некоторые свойства определителей 3-го порядка, легко проверяемые при помощи разложений (1) и (2).
Свойство:
Величина определителя не изменится, если все его строки заменить его столбцами с теми же номерами
Свойство:
При перестановке любых двух строк (или любых двух столбцов) определителя он изменяет свой знак на противоположный.
Свойство:
Общий множитель всех элементов одной строки (или одного столбца) определителя можно вынести за знак определителя

Следующие три свойства определителя вытекают из свойств 1-3. Впрочем, в их справедливости можно убедиться и непосредственно, пользуясь формулами (1) и (2).
Свойство:
Если определитель имеет две равные строки (или дна равных столбца), то он равен нулю.
Свойство:
Если все элементы некоторой строки (или некоторого столбца) равны нулю, то и сам определитель равен нулю.
Свойство:
Если соответствующие элементы двух строк (или двух столбцов) пропорциональны, то определитель равен нулю.
Укажем еще один способ вычисления определителя 3-го порядка
Минором Mij элемента aij определителя ∆ называется определитель, получаемый изданного путем вычеркивания элементов i-й строки и j-ro столбца, на пересечении которых находится этот элемент. Например, минором элемента a23 будет определитель
Алгебраическим дополнением элемента Aij называется минор Mij — этого элемента, взятый со своим знаком, если сумма i + j номеров строки и столбца, на пересечении которых расположен элемент aij, есть число четное, и с противоположным знаком, если это число нечетное:
Теорема:
Определитель равен сумме произведений элементов любой его строки (любого его столбца) на их алгебраические дополнения, так что имеют место следующие равенства

Покажем, например, что

Пользуясь формулой (2), получаем, что

Правило (3) называется разложением определителя по элементам i-й строки, а правило (4) — разложением определителя по элементам j -го столбца.
Пример:
Вычислить определитель
Раскладывая определитель по элементам 1-ой строки, получим
Понятия связанного и свободного векторов
Рассмотрим две точки А и В. По соединяющему их отрезку можно перемещаться в любом из двух противоположных направлений. Если считать, например, точку А начальной, а точку В конечной, то тогда получаем направленный отрезок АВ, в другом случае — направленный отрезок В А. Направленные отрезки часто называют связанными или закрепленными векторами. На чертеже заданное направление указывается стрелкой (рис. 1).
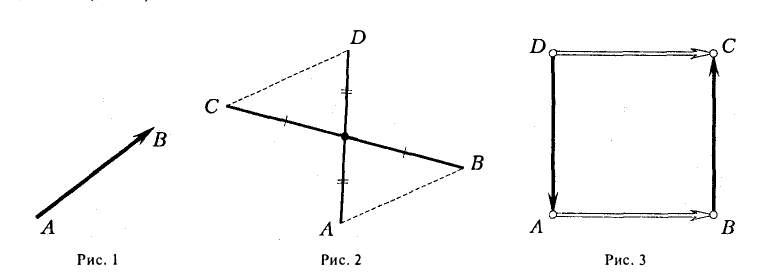
В случае, когда начальная и конечная точки совпадают, А = В, связанный вектор называется нулевым.
Определение:
Будем говорить, что связанные векторы АВ и CD равны, если середины отрезков AD и ВС совпадают (рис. 2).
Обозначение:
А В = CD.
Заметим, что в случае, когда точки А, В, С и D не лежат на одной прямой, это равносильно тому, что четырехугольник ABCD — параллелограмм. Ясно, что равные связанные векторы имеют равные длины.
Пример:
Рассмотрим квадрат и выберем векторы, как указано на рис.3. Векторы АВ и DC равны, а векторы ВС и DA не равны.
Укажем некоторые свойства равных связанных векторов:
- Каждый связанный вектор равен самому себе: АВ = АВ.
- Если АВ = CD, той CD = АВ.
- Если АВ = CD и CD = EF,то АВ = EF (рис.4).
Пусть АВ — заданный связанный вектор и С — произвольная точка. Ясно, что, опираясь на определение, всегда можно построить точку D так, чтобы
CD = АВ.
Тем самым, от каждой точки можно отложить связанный вектор, равный исходному (рис. 5).
Мы будем рассматривать свободные векторы, т. е. такие векторы, начальную точку которых можно выбирать произвольно, или, что то же самое, которые можно произвольно переносить параллельно самим себе. Ясно, что свободный вектор  однозначно определяется заданием связанного вектора АВ.
однозначно определяется заданием связанного вектора АВ.
Если в качестве начальных выбирать лишь те точки, которые лежат на прямой, определяемой заданным (ненулевым) связанным вектором, то мы приходим к понятию скользящего вектора (рис. 6).
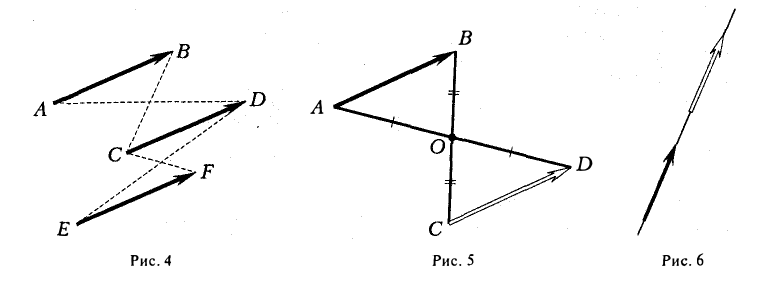
Связанные и скользящие векторы широко используются в теоретической механике.
Для обозначен ия свободных векторов будем пользоваться полужирными строчными латинскими буквами — а, b, с,… ; нулевой вектор обозначается через 0.
Пусть заданы вектор а и точка А. Существует ровно одна точка В, для которой
= а
(рис.7). Операция построения связанного вектора АВ, для которого выполняется это равенство, называется откладыванием свободного вектора а от точки А.
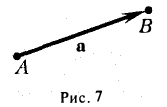
Заметим, что связанные векторы, получаемые в результате описанной операции откладывания, равны между собой и, значит, имеют одинаковую дли ну. Это позволяет ввести длину свободного вектора а, которую мы будем обозначать символом |а. Длина нулевого вектора равна нулю. Если а = b, то |а| = |b; обратное неверно.
Линейные операции над векторами
Сложение векторов
Пусть заданы два вектора а и b. Возьмем какую-нибудь точку О и отложим от нее вектор a:  = а. От полученной точки А отложим вектор b: = b. Полученный в результате вектор
= а. От полученной точки А отложим вектор b: = b. Полученный в результате вектор называется суммой векторов а и b и обозначается через a + b (рис. 8). Этот способ построения суммы векторов называется правилом треугольника.
называется суммой векторов а и b и обозначается через a + b (рис. 8). Этот способ построения суммы векторов называется правилом треугольника.
Нетрудно заметить, что сложение векторов коммутативно, т. е. для любых векторов а и b справедливо равенство
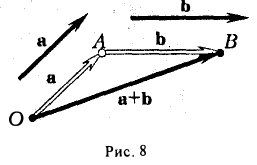
Если отложить векторы а и 1» от обшей точки О и построить на них как на сторонах параллелограмм, то вектор , идущий из общего начала О в противоположную вершину параллелограмма, будет их суммой а + b (или b +а) (рис. 10). Этот способ построения суммы векторов называется правилом параллелограмма.
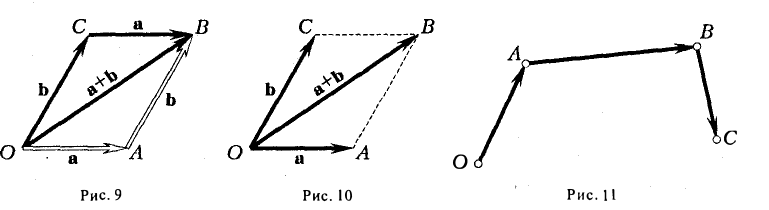
Пусть заданы три вектора, например, a, b и с. Отложим от произвольной точки О вектор a: = а; от полученной точки А отложим вектор b: = b; отточки В — вектор с:  = с (рис. 11). По определению суммы — а + b и
= с (рис. 11). По определению суммы — а + b и  = (а + b) + с (рис. 12). С другой стороны, АС = b + с и, значит, ОС = а + (Ь + с) (рис. 13). Тем самым, для любых векторов a, b и с выполняется равенство
= (а + b) + с (рис. 12). С другой стороны, АС = b + с и, значит, ОС = а + (Ь + с) (рис. 13). Тем самым, для любых векторов a, b и с выполняется равенство
(а +b) + с = а + (b + с),
т. е. сложение векторов ассоциативно. Опуская скобки, можно говорить о сумме трех векторов и записывать ее так:
а + b + с.
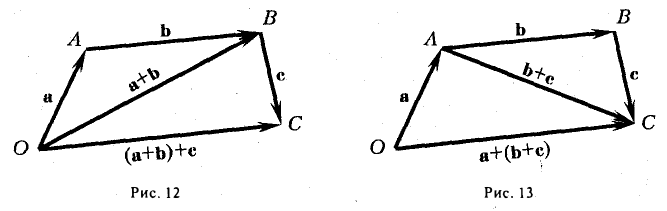
Аналогично определяется сумма любого числа векторов: это есть вектор, который замыкает ломаную, построенную из заданных векторов. На рис. 14 показан», как построить сумму семи векторов:

Приведенный способ сложения произвольного числа векторов называется правилом замыкающего ломаную.
Пример:
Найти сумму векторов, идущих из центра правильного шестиугольника в его вершины.
По правилу замыкающего ломаную получаем

(рис. 15).
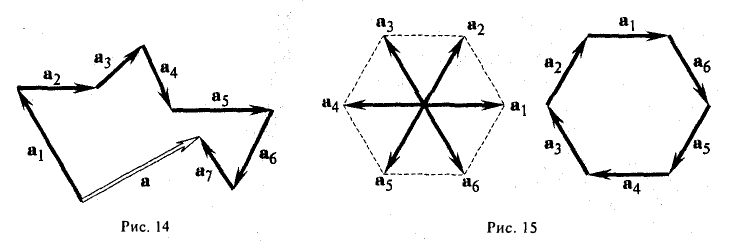
Умножение вектора на число
Определение:
Свободные векторы а и b называются коллинеарными, если определяющие их связанные векторы лежат на параллельных или на совпадающих прямых (рис. 16).
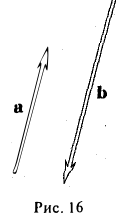
Обозначение: а||b.
Замечание:
Из определения следует, что если хотя бы один из векторов a и b нулевой, то они коллинеарны.
Если отложить коллинеарные векторы а и b от обшей точки О, = n, = Ь, то точки О, А н В будут лежать на одной прямой. При этом возможны два случая: точки А и В располагаются на этой прямой: 1) по одну сторону от точки О, 2) по разные стороны (рис. 17). В первом случае векторы а и b называются одинаково направленными, а во втором — противоположно направленными.
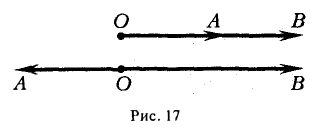
Если векторы имеют равные длины и одинаково направлены, то они равны. Пусть а — вектор, λ — вещественное число.
Определение:
Произведением вектора а на число λ называется вектор b такой, что
- |Ь| = |λ| • |а|;
2) векторы а и b одинаково (соответственно, противоположно) направлены, если λ > 0 (соответственно, λ < 0).
Обозначение: b = λа.
При λ = 0 положим λа = 0.
Таким образом, векторы а и Ь = λа коллинеарны по определению. Верной обратное: если векторы а(а ≠ 0) и Ь коллинеарны, то можно найти число А такое, что h = λа.
Укажем основные свойства этой операции умножения вектора на число:
(здесь λ и μ — любые действительные числа, а и Ь — произвольные векторы).
Определение:
Вектор, длина которого равна единице, называется единичным вектором, или ортом, и обозначается а° (читается: а с нуликом), |а°| = 1.
Если а ≠ 0, то вектор
есть единичный вектор (орт) направления вектора а (рис. 18).
Координаты и компоненты вектора
Выберем в пространстве прямоугольную декартову систему координат. Обозначим через i, j, к единичные векторы (орты) положительных направлений осей Ox, Оу, Oz (рис. 19). Рассмотрим произвольный вектор п, начало которого лежит в начале координат О, а конец — в точке А. Проведем через точку А плоскости, перпендикулярные осям Ох, Оу и Oz. Эти плоскости пересекут координатные оси в точках Р, Q и R соответственно. Из рис. 20 видно, что

Векторы  коллинеарны соответственно единичным векторам i, j, k,
коллинеарны соответственно единичным векторам i, j, k,
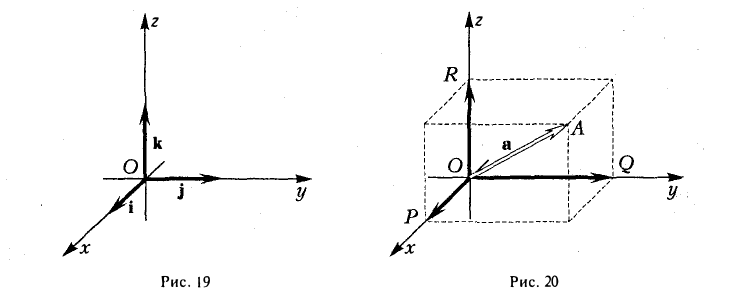
поэтому найдутся числа х, у, z такие, что

и, следовательно,
а = xi + yj + zk. (2)
Формула (2) называется разложением вектора а по векторам i, j, к. Указанным способом всякий вектор может быть разложен по векторам i, j, k.
Векторы i, j, к попарно ортогональны, и их длины равны единице. Тройку i, j, k называют ортонормированным (координатным) базисом (ортобазисом).
Можно показать, что для каждого вектора а разложение (2) по базису i, j, к единственно, т. е. коэффициенты х, у, z в разложении вектора а по векторам i, j, к определены однозначно. Эти коэффициенты называются координатами вектора а. Они совпадают с координатами х, у, z точки А — конца вектора а. Мы пишем в этом случае
а = {х, y,z}.
Эта запись означает, что свободный вектор а однозначно задастся упорядоченной тройкой своих координат. Векторы xi, yj, zk, сумма которых равна вектору а, называются компонентами вектора а.
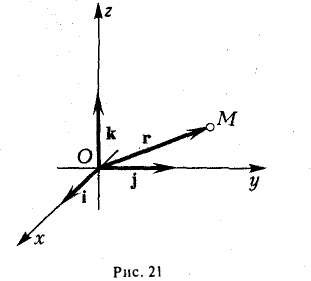
Из вышеизложенного следует, что два вектора а = { х1, у1, z1 } и b = {х2, у2, z2} равны тогда и только тогда, когда соответственно равны их координаты, т. е.
Радиус-вектором точки М(х,у, z) называется вектор г = xi + yj + zk, идущий из начала координат О в точку М (рис. 21).
Линейные операции над векторами в координатах
Пусть имеем два вектора а = { х1, у1, z1} и b = { х2, у2, z2 },так что а = х1i, у1j+ z1k. b = х2i+ у2j+z2k. На основании правила сложения векторов имеем

или, что то же,

— при сложении векторов их координаты попарно складываются. Аналогично получаем

Далее,

или, что то же,

— при умножении вектора на число все его координаты умножаются на это число.
Пусть а = { х1, у1, z1}, b = { х2, у2, z2 } — коллинеарные векторы, причем b ≠ 0. Тогда а = μb, т.е.

или (3)
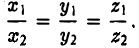
Обратно, если выполняются соотношения (3), то а = μb, т. е. векторы a и b коллинеарны.
Таким образом, векторы а и b коллинеарны тогда и только тогда, когда их координаты пропорциональны.
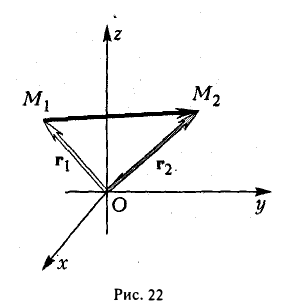
Пример:
Найти координаты вектора  начало которого находится в точке М1 ( х1, у1, z1 ). а конец — в точке M2 (х2, у2, z2).
начало которого находится в точке М1 ( х1, у1, z1 ). а конец — в точке M2 (х2, у2, z2).
Из рис. 22 видно, что = r2 — r1 , где r2, r1 — радиус-векторы точек М1 и M2 соответственно. Поэтому

— координаты вектора ММг равны разностям одноименных координат конечной М2 и начальной М точек этого вектора.
Проекция вектора на ось
Рассмотрим на оси l ненулевой направленный отрезок АВ (рис.23). Величиной направленного отрезка АВ на оси l называется число, равное длине отрезка АВ, взятой со знаком «+», если направление отрезка АВ совпадаете направлением оси l, и со знаком «-», если эти направления противоположны.
Рассмотрим теперь произвольный вектор , определяемый связанным вектором АВ. Опуская из его начала и конца перпендикуляры на заданную ось l, построим на ней направленный отрезок CD (рис. 24).
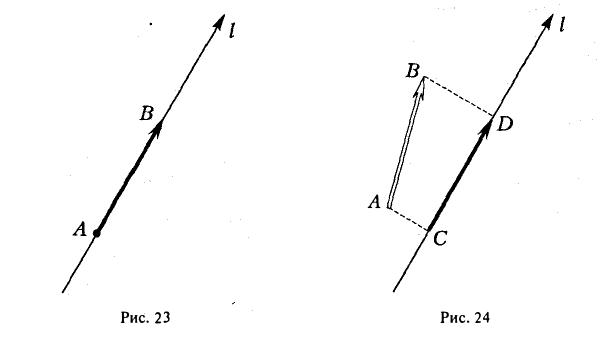
Определение:
Проекцией вектора на ось l называется величина направленного отрезка CD, построенного указанным выше способом.
Обозначение: 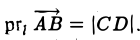
Основные свойства проекций
- Проекция вектора АВ на какую-либо ось l равна произведению длины вектора на косинус угла между осью и этим вектором (рис. 25)
- Проекция суммы векторов на какую-либо ось l равна сумме проекций векторов на ту же ось.

Например,

(рис. 26).
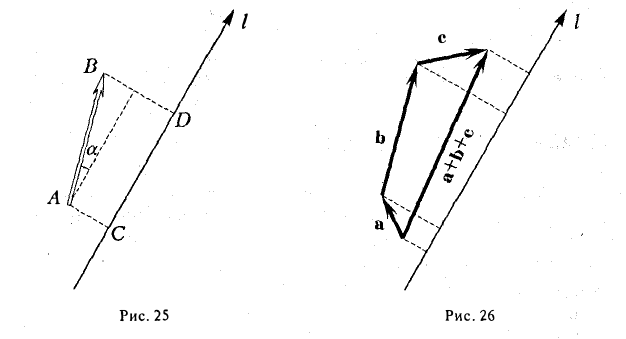
Скалярное произведение векторов
Пусть имеем два вектора a и b.
Определение:
Скалярным произведением вектора а на вектор b называется число, обозначаемое символом (а, b) и определяемое равенством

(1)
где φ, или в иной записи ( ), есть угол между векторами а и b (рис. 27 а).
), есть угол между векторами а и b (рис. 27 а).
Заметив, что |b| cos φ есть проекция вектора b на направление вектора а, можем написать

(рис. 27 б) и, аналогично,’ (2)

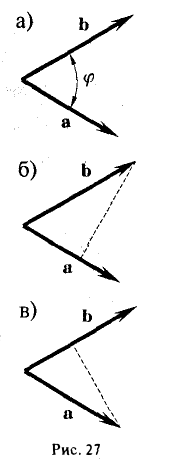
(рис. 27 в), т.е. скалярное произведение двух векторов равно длине одного из них, помноженной на проекцию на него другого вектора. В случае, если один из векторов а или b — нулевой, будем считать, что
(a, b) = 0.
Свойства скалярного произведения
- Скалярное произведение обращается в нуль в том и только в том случае, когда по крайней мере один из перемножаемых векторов является нулевым или когда векторы а и b ортогональны, a ⊥ b.
Это следует из формулы (1), определяющей скалярное произведение.
Поскольку направление нулевого вектора не определено, мы можем его считать ортогональным любому вектору. Поэтому указанное свойство скалярного произведения можно сформулировать так:

2. Скалярное произведение коммутативно:
(а, b) = (b, а).
Справедливость утверждения вытекает из формулы (I), если учесть четность функции cos φ: cos(- φ) = cos φ.
3. Скалярное произведение обладает распределительным свойством относительно сложения:
(а + b, с) = (а, с) + (b, c).
Действительно,

4. Числовой множитель А можно выносить за знак скалярного произведения
(λа, b) = (а, λb) = λ (а, b).
- Действительно, пусть λ > 0. Тогда

поскольку при λ > 0 углы () и (λ) равны (рис.28).
Аналогично рассматривается случай λ < 0. При λ = 0 свойство 4 очевидно.
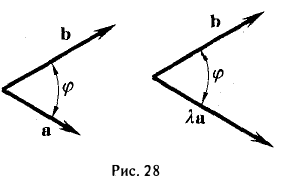
Замечание:
В общeм случае (а, b)c ≠ a(b, c).
Скалярное произведение векторов, заданных координатами
Пусть векторы а и b заданы своими координатами в ортонормированном базисе i, j, k:

Рассмотрим скалярное произведение векторов а и b:

Пользуясь распределительным свойством скалярного произведения, находим

Учитывая, что

получаем (4)

То есть, если векторы а и b заданы своими координатами в ортонормированном базисе, то их скалярное произведение равно сумме произведений одноименных координат.
Пример:
Найти скалярное произведение векторов n = 4i — 2j + k и b = 6i + 3j + 2k.
(a, b) = 4 • 6 + (-2) • 3 + 1 • 2 = 20.
Скалярное произведение вектора на себя называется скалярным квадратом:
(а, а) = а2.
Применяя формулу (4) при b = а, найдем (5)
С другой стороны,

так что из (5) следует, что (6)
— в ортонормированном базисе длина вектора равна квадратному корню из суммы квадратов его координат.
Косинус угла между векторами. Направляющие косинусы
Согласно определению
(а, b) = |а| • |b| • cos φ,
где φ — у гол между векторами а и b. Из этой формулы получаем
(7)
(предполагается, что векторы а и b — ненулевые).
Пусть а = { х1, у1, z1}, b = { х2, у2, z2 }. Тогда формула (7) примет следующий вид

Пример:
Найти угол между векторами a = {2, -4,4,} и d = {-3,2,6}. Пользуясь формулой (8), находим

Пусть b = i, T.e. b = {1,0,0}. Тогда для всякого вектора а = { х1, у1, z1} ≠ 0 имеем
или, в координатной записи, (9)
где а есть угол, образованный вектором я с осью Ох. Аналогично получаем формулы
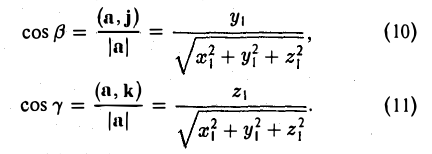
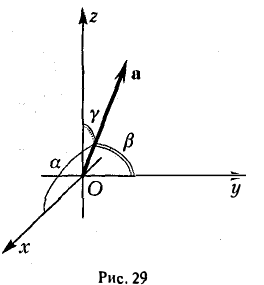
Формулы (9)-(11) определяют направляющие косинусы вектора а, т. е. косинусы углов, образуемых вектором n с осями координат (рис. 29).
Пример:
Найти координаты единичного вектора n°. По условию | n°| = 1. Пусть n° = zi+ yj+ zk. Тогда
Таким образом, координатами единичного вектора являются косинусы углов, образованных этим вектором с осями координат:

Отсюда получаем

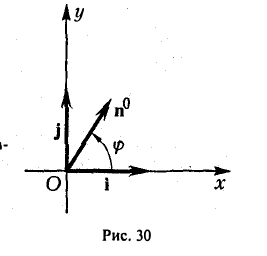
Пример:
Пусть единичный вектор n° ортогонален оси z:
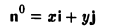
(рис. 30). Тогда его координаты г и у соответственно равны
x=cos φ, y = sin φ.
Тем самым,
Векторное произведение векторов
Определение:
Векторным произведением вектора а на вектор b называется вектор, обозначаемый символом [a, b] (или a х b), такой, что
1) длина вектора [а, b] равна |а| • |Ь| • sin φ, где φ — угол между векторами а и b (рис.31);
2) вектор [а, b] перпендикулярен векторам а и b, т.е. перпендикулярен плоскости этих векторов;
3) вектор [а, Ь] направлен так, что из конца этого вектора кратчайший поворот от л к Ь виден происходящим против часовой стрелки (рис. 32).
Иными словами, векторы я, b и [a, b] образуют правую тройку векторов, т.е. расположены так, как большой, указательный и средний пальцы правой руки. В случае, если векторы a и b коллинеарны, будем считать, что [a, b] = 0.
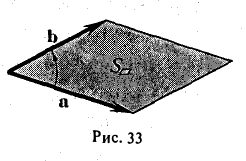
По определению длина векторного произведения (1)

численно равна площади  параллелограмма (рис.33), построенного на перемножаемых векторах a и b как на сторонах:
параллелограмма (рис.33), построенного на перемножаемых векторах a и b как на сторонах:
|[a, b]| = .
Свойства векторного произведения
- Векторное произведение равно нулевому вектору тогда и только тогда, когда по крайней мере один из перемножаемых векторов является нулевым или когда эти векторы коллинеарны (если векторы я и b коллинеарны, то угол между ними равен либо 0, либо тг).
Это легко получить из того, что |[a, b]| = |a| • |b| • sin φ.
Если считать нулевой вектор коллинеарным любому вектору, то условие коллинеарности векторов a и b можно выразить так

2. Векторное произведение антикоммутативно, т. е. всегда (2)

В самом деле, векторы [а, b] и [b, а] имеют одинаковую длину и коллинеарны. Направления же этих векторов противоположны, так как из конца вектора [a, b] кратчайший поворот от a к b будет виден происходящим против часовой стрелки, а из конца вектора [b, a] — почасовой стрелке (рис. 34).
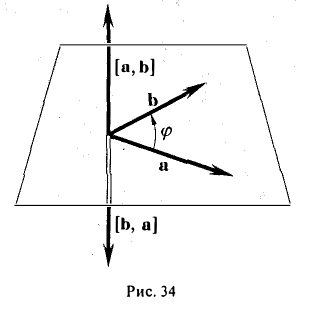
3. Векторное произведение обладает распределительным свойством по отношению к сложению

4. Числовой множитель λ можно выносить за знак векторного произведения

Векторное произведение векторов, заданных координатами
Пусть векторы a и b заданы своими координатами в базисе i,j, k: а = { х1, у1, z1}, b = { х2, у2, z2 }. Пользуясь распределительным свойством векторного произведения, находим (3)
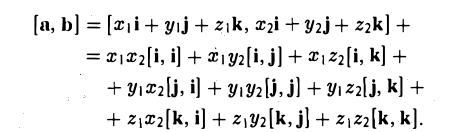
Выпишем векторные произведения координатных ортов (рис. 35):



Поэтому для векторного произведения векторов a и b получаем из формулы (3) следующее выражение (4)

Формулу (4) можно записать в символической, легко запоминающейся форме, если воспользоваться определителем 3-го порядка: (5)
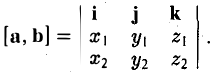
Разлагая этот определитель по элементам 1-й строки, получим (4). Примеры:
- Найти площадь параллелограмма, построенного на векторах а = i + j- k, b = 2i + j- k.
Искомая площадь = |[а, b]. Поэтому находим

откуда
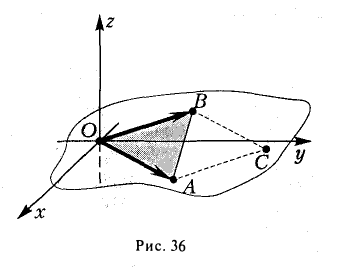
2. Найти площадь треугольника ОАВ (рис.36).
Ясно, что площадь S∆ треугольника ОАВ равна половине площади S параллелограмма О АС В. Вычисляя векторное произведение [a, b] векторов a= и b = , получаем
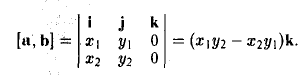
Отсюда

Замечание:
Векторное произведение не ассоциативно, т.е. равенство [[а, b], с] = [а, b,с]] в общем случае неверно. Например, при а = i, b = j. c= j имеем

Смешанное произведение векторов
Пусть имеем три вектора а, b и с. Перемножим векторы а и b векторно. В результате получим вектор [а, b). Умножим его скалярно на вектор с:
([a, b], с).
Число ([а, b], с) называется смешанным произведением векторов а, b, с и обозначается символом (а, b, с).
Геометрический смысл смешанного произведения
Отложим векторы а, b и с от общей точки О (рис. 37). Если все четыре точки О, А, В, С лежат в одной плоскости (векторы a, b и с называются в этом случае компланарными), то смешанное произведение ([а, b], с) = 0. Это следует из того, что вектор [а, b] перпендикулярен плоскости, в которой лежат векторы а и b, а значит, и вектору с.
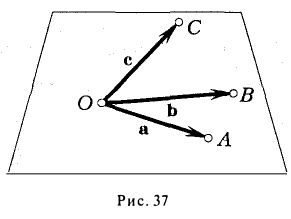
Если же точки О, А, В, С не лежат в одной плоскости (векторы a, b и с некомпланарны), построим на ребрах OA, OB и ОС параллелепипед (рис. 38 а). По определению векторного произведения имеем
где — площадь параллелограмма OADB, а с — единичный вектор, перпендикулярный векторам а и b и такой, что тройка а, b, с — правая, т. е. векторы a, b и с расположены соответственно как большой, указательный и средний пальцы правой руки (рис. 38 6).
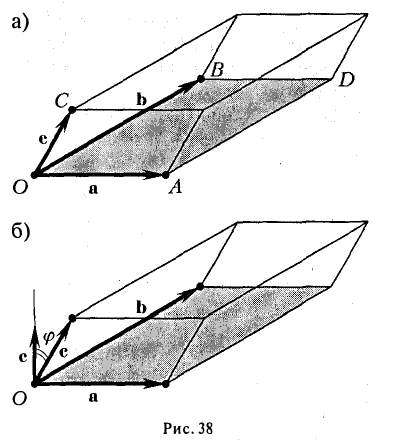
Умножая обе части последнего равенства справа скалярно на вектор с, получаем, что

Число ргe с равно высоте h построенного параллелепипеда, взятого со знаком « + », если угол ip между векторами с и с острый (тройка а, b, с — правая), и со знаком «-», если угол — тупой (тройка а, b, с — левая), так что

Тем самым, смешанное произведение векторов a, b и с равно объему V параллелепипеда, построенного на этих векторах как на ребрах, если тройка а, b, с — правая, и -V, если тройка а, b, с — левая.
Исходя из геометрического смысла смешанного произведения, можно заключить, что, перемножая те же векторы a, b и с в любом другом порядке, мы всегда будем О получать либо +V, либо -V. Знак произведения будет зависеть лишь от того, какую тройку образуют перемножаемые векторы — правую или левую. Если векторы а, b, с образуют правую тройку, то правыми будут также тройки b, с, а и с, а, b. В то же время все три тройки b, а, с; а, с, b и с, b, а — левые. Тем самым,
(а, b, с) = (b, с, а) = (с, a,b) = -(b, а, с) = -(а, с, b) = -(с, b, а).
Еще раз подчеркнем, что смешанное произведение векторов равно нулю тогда и только тогда, когда перемножаемые векторы а, b, с компланарны:
{а, b, с компланарны} <=> (а, b, с) = 0.
Смешанное произведение в координатах
Пусть векторы а, b, с заданы своими координатами в базисе i, j, k:

Найдем выражение для их смешанного произведения (а, b, с). Имеем

Откуда

Итак,
— смешанное произведение векторов, заданных своими координатами в базисе i, j, k, равно определителю третьего порядка, строки которого составлены соответственно из координат первого, второго и третьего из перемножаемых векторов.
Необходимое и достаточное условие компланарности векторов а = { х1, у1, z1}, b = { х2, у2, z2 }, c = { х3, у3, z3} запишется в следующем виде
Пример:
Проверить, компланарны ли векторы
a = {7, 4,-6}, b = {2, 1,1}, с ={19, 11,17}.
Рассматриваемые векторы будут компланарны или некомпланарны в зависимости от того, будет равен нулю или нет определитель
Разлагая его по элементам первой строки, получим

Двойное векторное произведение
Двойное векторное произведение [а, [b, с]] представляет собой вектор, перпендикулярный к векторам а и [b, с]. Поэтому он лежит в плоскости векторов b и с и может быть разложен по этим векторам. Можно показать, что справедлива формула
[а, [b, с]] = b(а, с) — с(а, b).
Решение заданий и задач по предметам:
- Математика
- Высшая математика
- Математический анализ
- Линейная алгебра
Дополнительные лекции по высшей математике:
- Тождественные преобразования алгебраических выражений
- Функции и графики
- Преобразования графиков функций
- Квадратная функция и её графики
- Алгебраические неравенства
- Неравенства
- Неравенства с переменными
- Прогрессии в математике
- Арифметическая прогрессия
- Геометрическая прогрессия
- Показатели в математике
- Логарифмы в математике
- Исследование уравнений
- Уравнения высших степеней
- Уравнения высших степеней с одним неизвестным
- Комплексные числа
- Непрерывная дробь (цепная дробь)
- Алгебраические уравнения
- Неопределенные уравнения
- Соединения
- Бином Ньютона
- Число е
- Непрерывные дроби
- Функция
- Исследование функций
- Предел
- Интеграл
- Двойной интеграл
- Тройной интеграл
- Интегрирование
- Неопределённый интеграл
- Определенный интеграл
- Криволинейные интегралы
- Поверхностные интегралы
- Несобственные интегралы
- Кратные интегралы
- Интегралы, зависящие от параметра
- Квадратный трехчлен
- Производная
- Применение производной к исследованию функций
- Приложения производной
- Дифференциал функции
- Дифференцирование в математике
- Формулы и правила дифференцирования
- Дифференциальное исчисление
- Дифференциальные уравнения
- Дифференциальные уравнения первого порядка
- Дифференциальные уравнения высших порядков
- Дифференциальные уравнения в частных производных
- Тригонометрические функции
- Тригонометрические уравнения и неравенства
- Показательная функция
- Показательные уравнения
- Обобщенная степень
- Взаимно обратные функции
- Логарифмическая функция
- Уравнения и неравенства
- Положительные и отрицательные числа
- Алгебраические выражения
- Иррациональные алгебраические выражения
- Преобразование алгебраических выражений
- Преобразование дробных алгебраических выражений
- Разложение многочленов на множители
- Многочлены от одного переменного
- Алгебраические дроби
- Пропорции
- Уравнения
- Системы уравнений
- Системы уравнений высших степеней
- Системы алгебраических уравнений
- Системы линейных уравнений
- Системы дифференциальных уравнений
- Арифметический квадратный корень
- Квадратные и кубические корни
- Извлечение квадратного корня
- Рациональные числа
- Иррациональные числа
- Арифметический корень
- Квадратные уравнения
- Иррациональные уравнения
- Последовательность
- Ряды сходящиеся и расходящиеся
- Тригонометрические функции произвольного угла
- Тригонометрические формулы
- Обратные тригонометрические функции
- Теорема Безу
- Математическая индукция
- Показатель степени
- Показательные функции и логарифмы
- Множество
- Множество действительных чисел
- Числовые множества
- Преобразование рациональных выражений
- Преобразование иррациональных выражений
- Геометрия
- Действительные числа
- Степени и корни
- Степень с рациональным показателем
- Тригонометрические функции угла
- Тригонометрические функции числового аргумента
- Тригонометрические выражения и их преобразования
- Преобразование тригонометрических выражений
- Комбинаторика
- Вычислительная математика
- Прямая линия на плоскости и ее уравнения
- Прямая и плоскость
- Линии и уравнения
- Прямая линия
- Уравнения прямой и плоскости в пространстве
- Кривые второго порядка
- Кривые и поверхности второго порядка
- Числовые ряды
- Степенные ряды
- Ряды Фурье
- Преобразование Фурье
- Функциональные ряды
- Функции многих переменных
- Метод координат
- Гармонический анализ
- Вещественные числа
- Предел последовательности
- Аналитическая геометрия
- Аналитическая геометрия на плоскости
- Аналитическая геометрия в пространстве
- Функции одной переменной
- Высшая алгебра
- Векторный анализ
- Векторы
- Скалярное произведение векторов
- Векторное произведение векторов
- Смешанное произведение векторов
- Операции над векторами
- Непрерывность функций
- Предел и непрерывность функций нескольких переменных
- Предел и непрерывность функции одной переменной
- Производные и дифференциалы функции одной переменной
- Частные производные и дифференцируемость функций нескольких переменных
- Дифференциальное исчисление функции одной переменной
- Матрицы
- Линейные и евклидовы пространства
- Линейные отображения
- Дифференциальные теоремы о среднем
- Теория устойчивости дифференциальных уравнений
- Функции комплексного переменного
- Преобразование Лапласа
- Теории поля
- Операционное исчисление
- Системы координат
- Рациональная функция
- Интегральное исчисление
- Интегральное исчисление функций одной переменной
- Дифференциальное исчисление функций нескольких переменных
- Отношение в математике
- Математическая логика
- Графы в математике
- Линейные пространства
- Первообразная и неопределенный интеграл
- Линейная функция
- Выпуклые множества точек
- Система координат

2.2.3. Как найти направляющий вектор
по общему уравнению прямой?
Очень просто:
Если прямая задана общим уравнением ![]() , то вектор
, то вектор ![]() является направляющим вектором данной прямой.
является направляющим вектором данной прямой.
Примеры нахождения направляющих векторов прямых:

Утверждение позволяет найти лишь один направляющий вектор из бесчисленного множества, но нам больше и не нужно. Хотя в ряде случаев координаты направляющих векторов целесообразно сократить: так, уравнение ![]() задаёт прямую, которая параллельна оси
задаёт прямую, которая параллельна оси ![]() и координаты полученного направляющего вектора
и координаты полученного направляющего вектора ![]() удобно разделить на –2, получая в точности базисный вектор
удобно разделить на –2, получая в точности базисный вектор ![]() в качестве направляющего вектора. Аналогично, уравнение
в качестве направляющего вектора. Аналогично, уравнение ![]() задаёт прямую, параллельную оси
задаёт прямую, параллельную оси ![]() , и, разделив координаты вектора
, и, разделив координаты вектора ![]() на 5, получаем направляющий вектор
на 5, получаем направляющий вектор ![]() .
.
Читателям с низким уровнем подготовки рекомендую постоянно выполнять чертежи, чтобы лучше понимать мои объяснения!
Теперь выполним проверку Задачи 61. Решение уехало вверх, поэтому напоминаю, что в ней мы составили уравнение прямой ![]() по точке
по точке ![]() и направляющему вектору
и направляющему вектору ![]() . Проверка состоит в двух действиях:
. Проверка состоит в двух действиях:
Во-первых, по уравнению прямой ![]() восстанавливаем её направляющий вектор:
восстанавливаем её направляющий вектор: ![]() – всё нормально, получили исходный вектор (в ряде случаев может получиться коллинеарный исходному вектор, и это несложно заметить по пропорциональности соответствующих координат).
– всё нормально, получили исходный вектор (в ряде случаев может получиться коллинеарный исходному вектор, и это несложно заметить по пропорциональности соответствующих координат).
Во-вторых, координаты точки ![]() должны удовлетворять уравнению
должны удовлетворять уравнению ![]() . Подставляем их в уравнение:
. Подставляем их в уравнение:
![]()
![]() – получено верное равенство, чему мы очень рады.
– получено верное равенство, чему мы очень рады.
Вывод: задание выполнено правильно.
Задача 62
Составить уравнение прямой по точке ![]() и направляющему вектору
и направляющему вектору ![]()
Это задача для самостоятельного решения. И проверка, проверка, проверка!
Старайтесь всегда (если это возможно) выполнять проверку на черновике.
Глупо допускать ошибки там, где их 100%-но можно избежать!
В том случае, если одна из координат направляющего вектора равна нулю, поступают очень просто:
Задача 63
Составить уравнение прямой по точке ![]() и направляющему вектору
и направляющему вектору ![]() .
.
Решение: формула ![]() не годится, так как знаменатель правой части равен нулю. Но выход прост! Используя свойства пропорции, перепишем уравнение в виде
не годится, так как знаменатель правой части равен нулю. Но выход прост! Используя свойства пропорции, перепишем уравнение в виде ![]() , и дальнейшее покатилось по глубокой колее:
, и дальнейшее покатилось по глубокой колее:
![]()
переставим части местами:
![]()
Ответ: ![]()
Проверка:
1) Восстановим направляющий вектор найденной прямой ![]() :
:
![]() – полученный вектор коллинеарен исходному направляющему вектору
– полученный вектор коллинеарен исходному направляющему вектору ![]() .
.
2) Подставим координаты точки ![]() в уравнение
в уравнение ![]() :
:
![]()
![]() – получено верное равенство, значит, точка
– получено верное равенство, значит, точка ![]() удовлетворяет уравнению.
удовлетворяет уравнению.
Вывод: задание выполнено правильно
Возникает вопрос: зачем маяться с формулой ![]() , если существует универсальная версия
, если существует универсальная версия ![]() , которая сработает в любом случае?
, которая сработает в любом случае?
Причин две. Во-первых, формула в виде дроби ![]() гораздо лучше запоминается. А во-вторых, недостаток универсальной формулы
гораздо лучше запоминается. А во-вторых, недостаток универсальной формулы ![]() состоит в том, что здесь повышается риск запутаться при подстановке координат.
состоит в том, что здесь повышается риск запутаться при подстановке координат.
Задача 64
Составить уравнение прямой по точке ![]() и направляющему вектору
и направляющему вектору ![]() , выполнить проверку.
, выполнить проверку.
Это задача для самостоятельного решения. Кстати, проверку можно выполнять и графически – решили задачу и изобразили всё на чертеже. Правда, такой способ бывает неудобен или трудновыполнИм, и поэтому всё-таки «рулит» аналитика.
Вернёмся к вездесущим двум точкам:
 2.2.4. Как составить уравнение прямой по двум точкам?
2.2.4. Как составить уравнение прямой по двум точкам?
 2.2.2. Как составить уравнение прямой по точке и направляющему вектору?
2.2.2. Как составить уравнение прямой по точке и направляющему вектору?
| Оглавление |
Автор: Aлeксaндр Eмeлин
41. Как определить направление момента силы?
Для
описания динамики вращательного движения
твердого тела необходимо ввести понятие
момента силы.
Момент силы
относительно некоторой точки — это
векторное произведение силы
на кратчайшее
расстояние
от этой точки до линии действия силы.
Момент силы
— аксиальный
вектор. Он
направлен вдоль оси вращения. Направление
вектора момента силы определяется
правилом буравчика, а величина его равна
M.
При этом надо различать понятия момента
силы относительно
точки и относительно оси. Если сила f
приложена к материальной точке А, то
моментом силы М относительно произвольной
точки О называется векторное произведение
радиуса-вектора r, проведенного из точки
О к точке А, и вектора силы: М = [ r f ]
. Модуль векторного произведения
= r f sin a, а направление вектора М
определяется правилом правого буравчика:
направление первого вектора r по
кратчайшему пути вращается к направлению
второго вектора f, а движение оси буравчика
при этом вращении показывает направление
вектора М.
Моментом силы относительно
произвольной оси z называется векторное
произведение радиуса-вектора r и
составляющей f силы f , приложенной
в точке А: М = [ r f ] где составляющая
f представляет собой проекцию
силы f на плоскость, перпендикулярную
оси z и проходящую через точку А , а
r — радиус- вектор точки А, лежащий в этой
плоскости. M=Fd, т. е. момент силы равен
произведению силы F на длину перпендикуляра
d, опущенного из оси на направление силы.
Длину перпендикуляра, опущенного из
оси на направление силы, называют плечом
силы. Значит, момент силы равен произведению
величины силы на плечо силы. Ясно, что
перенесение точки приложения силы вдоль
ее направления не меняет ее момента
(рис. 120). Если направление силы проходит
через ось вращения, то плечо силы равно
нулю; следовательно, равен нулю и момент
силы этом случае сила не вызывает
вращения тела: сила, момент которой
относительно данной оси равен нулю, не
вызывает вращения вокруг этой оси.
Пользуясь понятием момента силы, мы
можем по-новому сформулировать условия
равновесия тела, закрепленного на оси
и находящегося под действием двух сил.
Как мы видели, для равновесия необходимо,
чтобы силы стремились вращать тело в
противоположных направлениях и чтобы
произведения сил на их расстояния до
оси были равны. Значит, при равновесии
моменты обеих сил должны быть равны по
величине и противоположны по знаку.
Таким образом, для равновесия тела,
закрепленного на оси, алгебраическая
сумма моментов действующих на него сил
должна быть равна нулю. Так как момент
силы определяется произведением величины
силы на плечо, то единицу момента мы
получим, взяв силу, равную единице, плечо
которой также равно единице. Значит, в
системе СИ единицей момента силы является
момент силы в 1 н, действующей на плече
в 1 м, т. е. 1 н*м, в системе СГС —1 дин*см,
в системе МКСС— 1 кГ*м. Пользуясь данными
§ 45, найдем соотношения между этими
единицами:1 дин*см = 10
-7
н*м; 1 кГ*м = 9,8 н*м.
Углова́я
ско́рость —
векторная
физическая величина, характеризующая
скорость вращения тела. Вектор угловой
скорости по величине равен углу
поворота тела в единицу времени:
,
а
направлен по оси
вращения
согласно правилу
буравчика,
то есть, в ту сторону, в которую ввинчивался
бы буравчик
с правой резьбой, если бы вращался в ту
же сторону. Единица
Единица
измерения
угловой скорости, принятая в системах
СИ
и СГС) —
радианы
в секунду.
(Примечание: радиан,
как и любые единицы измерения угла, —
физически безразмерен, поэтому физическая
размерность угловой скорости —
просто [1/секунда]).Определим угловую
скорость как вектор, величина которого
численно равна угловой скорости, b
направленный вдоль оси вращения, причем,
если смотреть с конца этого вектора, то
вращение направлено против часовой
стрелки
.
Исторически сложилось, что положительным
направлением вращения считается вращение
«против часовой стрелки», хотя, конечно,
выбор этого направления абсолютно
условен. Для определения направления
вектора угловой скорости можно также
воспользоваться «правилом буравчика»
(которое также называется «правилом
правого винта») — если направление
движения ручки буравчика (или штопора)
совместить с направлением вращения, то
направление движения всего буравчика
совпадет с направлением вектора угловой
скорости.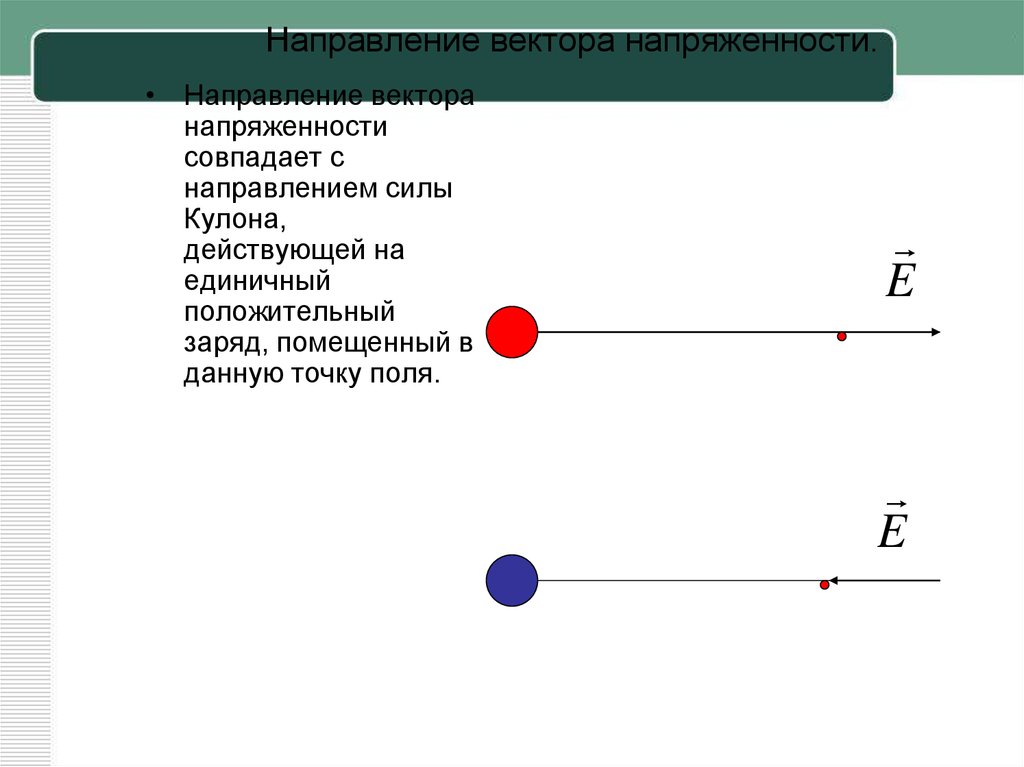
43.
Как
определить направление углового
ускарения? Угловое
ускорение
— векторная физическая величина,
характеризующая быстроту изменения
угловой скорости твёрдого тела.
Угловое
ускорение
равно первой производной от угловой
скорости по времени.Формула угловой
скорости:
Единица
углового ускорения — радиан в секунду
в квадрате.
Углово́е
ускоре́ние —
псевдовекторная
физическая
величина,
характеризующая быстроту изменения
угловой
скорости
твёрдого
тела.
При
вращении
тела вокруг неподвижной оси,
угловое ускорение по модулю равно[1]:
Вектор
углового ускорения α
направлен вдоль оси вращения (в сторону
при
ускоренном вращении и противоположно
—
при замедленном).
При
вращении вокруг неподвижной точки
вектор углового ускорения определяется
как первая производная от вектора
угловой скорости ω
по времени[2],
то есть
,
и
направлен по касательной к годографу
вектора
в
соответствующей его точке.
44.
При
каком условии мы имеем право считать в
лабораторной работе №4 «Изучение
основного закона динамики вращательного
движения» линейное ускорение точек на
ободе щкива равным ускорению поступательного
движения груза?
Момент
сил создается грузом m, привязанным к
нити Н, которая навита на один из
шкивов. Если момент сил трения Mтр,
приложенный к оси маятника, мал по
сравнению с моментом силы натяжения
нити, то проверка уравнения
не представляет труда. Действительно,
измеряя время t,
в течение которого груз из состояния
покоя опустится на расстояние h,
можно легко найти ускорение груза а,
в проекции на координатную ось,
совпадающую с направлением движения:
, которое
связано с угловым ускорением
(при отсутствии проскальзывания нити
относительно обода шкива) очевидным
соотношением
, где
r
— радиус шкива.
Векторная алгебра — Документация Godot Engine (stable) на русском языке
Введение
Этот урок — короткое и практичное введение в линейную алгебру, применяемую в разработке игр.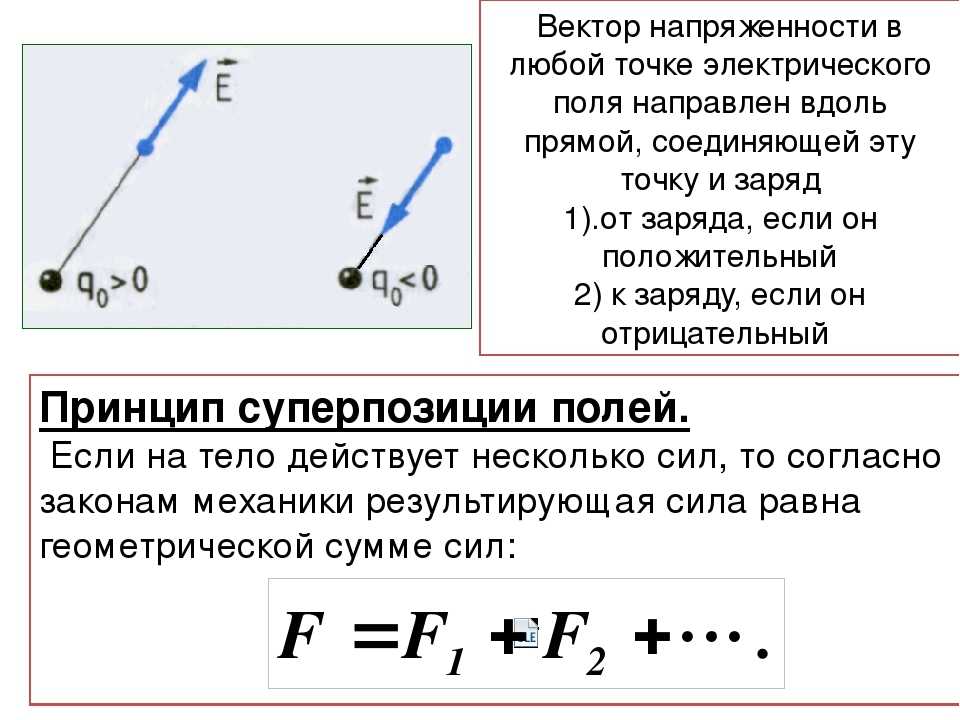
Линейная алгебра изучает векторы и их использование. Векторы могут применяться в 2D и 3D разработке и Godot использует их интенсивно. Разработчику игр требуется хорошее понимание векторной алгебры чтобы стать сильным в этой области.
Примечание
Этот урок — не учебник по линейной алгебре. Мы рассмотрим только то, что применяется в разработке игр. Для более широкого взгляда на математику, смотрите https://www.khanacademy.org/math/linear-algebra
Системы координат (2D)
В 2D пространстве, координаты определены использованием горизонтальной оси (x) и вертикальной оси (y). Определённая позиция в 2D пространстве записывается как пара значений, таких как (4, 3).
Примечание
Если вы новичок в компьютерной графике, вам может показаться странным, что положительная ось
y
Любая точка на 2D плоскости может быть таким образом определена парой чисел. Вы также можете рассматривать (4, 3) как смещение от точки (0, 0), или точки начала координат. Нарисуем стрелку от начала координат до заданной точки:
Это вектор. Вектор предоставляет множество полезной информации. Помимо сообщения нам, что точка расположена в (4, 3), мы можем также представить это в виде угла θ и длины (величины, модуля) m. В данном примере стрелка — это вектор позиции — он обозначает позицию в пространстве относительно начала координат.
При рассмотрении векторов крайне важно иметь в виду, что они представляют только
относительные направление и величину (модуль). Вектору нельзя приписать определённой позиции. Два следующих вектора идентичны:
Оба вектора представляют точку 4 единицами правее и 3 единицами ниже стартовой точки.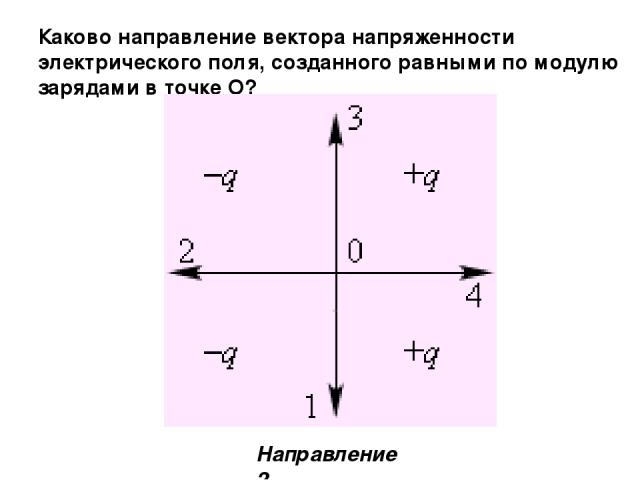 Неважно, где на плоскости вы нарисуете вектор, он всегда представляет относительное направление и величину.
Неважно, где на плоскости вы нарисуете вектор, он всегда представляет относительное направление и величину.
Операции над векторами
Вы можете применять любой из методов (задание координат x и y или угла с длиной) для определения вектора, но обычно программисты используют координаты. Для примера, в Godot начало координат — это верхний-левый угол экрана, так что для перемещения 2D узла с именем Node2D на 400 пикселей вправо и 300 вниз используйте следующий код:
$Node2D.position = Vector2(400, 300)
Godot поддерживает типы Vector2 и Vector3 для 2D и 3D соответственно. Математические правила, рассказанные в этой статье, применяются к обоим типам.
Доступ к полям
К отдельным компонентам вектора можно обращаться непосредственно по имени.
# create a vector with coordinates (2, 5) var a = Vector2(2, 5) # create a vector and assign x and y manually var b = Vector2() b.x = 3 b.y = 1
Сложение векторов
Когда два вектора складываются или вычитаются, складываются соответствующие компоненты:
var c = a + b # (2, 5) + (3, 1) = (5, 6)
Мы также можем посмотреть визуально на добавление второго вектора к концу первого:
Отметьте что сложение a + b даёт такой же результат что и b + a.
Скалярное перемножение
Примечание
Векторы представляют направление и длину (магнитуду). Значение, представленное только длиной, называется скаляром.
Вектор может быть умножен на скаляр:
var c = a * 2 # (2, 5) * 2 = (4, 10) var d = b / 3 # (3, 6) / 3 = (1, 2)
Примечание
Умножение вектора на скаляр не меняет направление, только длину. Это как бы увеличение вектора.
Практические применения
Давайте посмотрим на два обычных приёма использования для векторного сложения и вычитания.
Движение
Вектор может представлять любую длину и направление. Обычные примеры это: позиция, скорость, ускорение, и сила. На этом изображении, космический корабль на шаге 1 имеет вектор позиции (1,3) а вектор скорости (2,1). Вектор скорости представляет как далеко пойдёт корабль на каждом шаге. Вы можете найти его позицию на шаге 2 добавляя скорость к текущей позиции.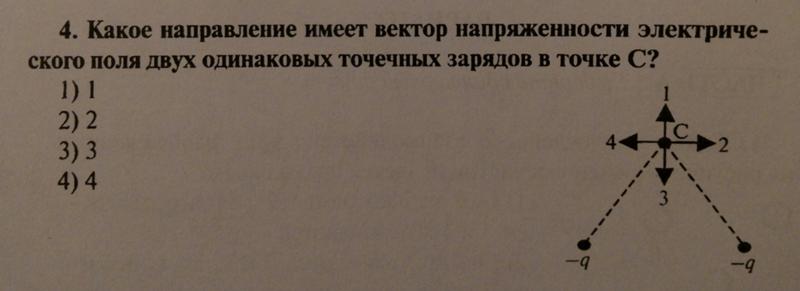
Совет
Скорость вычисляет изменение позиции за единицу времени. Новая позиция находится добавлением скорости к предыдущей позиции.
Направление в сторону цели
В этом примере вы, управляя танком, хотите направить дуло на робота. Вычитание позиции танка из позиции робота даёт вектор, направленный от танка к роботу.
Совет
Для нахождения вектора направления от A до B используйте B - A.
Единичные векторы
Вектор с длиной, равной 1, называется единичным вектором. Они также иногда называются векторами направления или нормалями. Единичные векторы полезны, когда вам нужно сохранить направление без учёта длины.
Нормализация
Нормализация вектора означает приведение его длины к 1 с сохранением его направления. Это делается путём деления каждого из его компонентов на длину. Поскольку это довольно распространённая операция,
Поскольку это довольно распространённая операция, Vector2 и Vector3 предоставляют метод нормализации:
a = a.normalized()
Предупреждение
Поскольку нормализация подразумевает деление на длину вектора, вы не можете нормализовать вектор с длиной равной 0. Попытка сделать это закончится ошибкой.
Отражение
Обычный пример использования единичных векторов — определение нормалей. Векторы нормалей — это единичные векторы, перпендикулярные к поверхности, определяющей их направление. Обычно они используются в обработке света, столкновений и других операциях с поверхностями.
Например, представьте что вы движете шар, который вы хотите отражать от стен или других объектов:
Нормаль поверхности имеет значение (0, -1), потому что это горизонтальная поверхность. Когда шар сталкивается, мы берём его оставшееся движение (количество, оставшееся, когда он касается поверхности) и отражаем его, используя нормаль.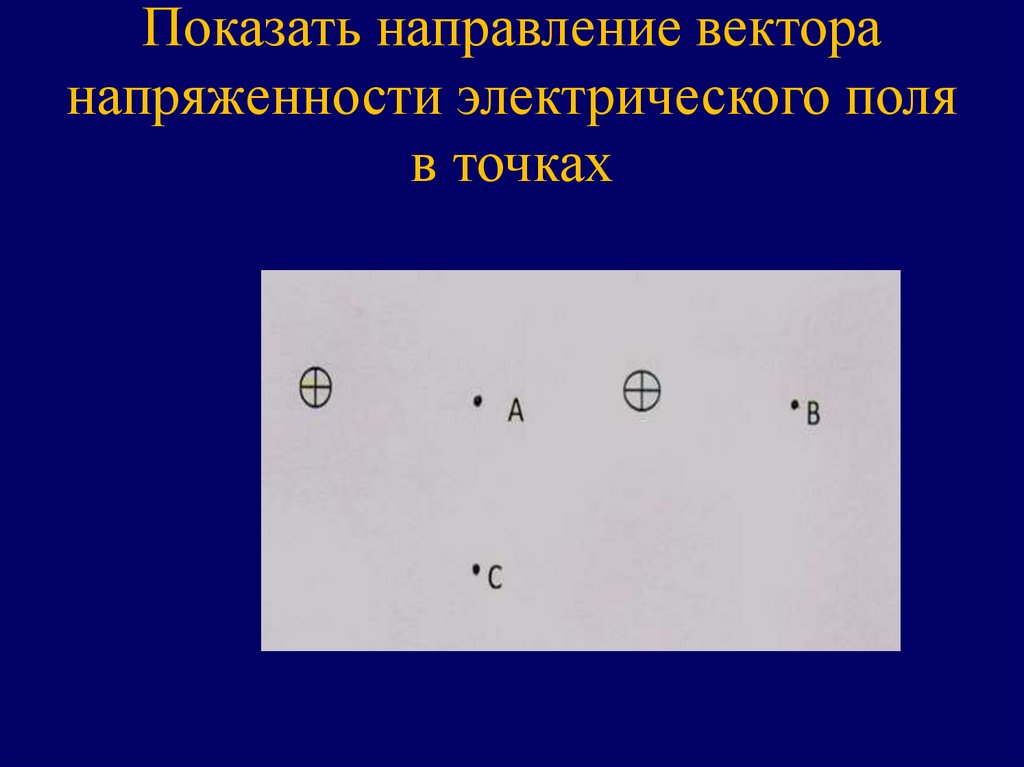 В Godot класс Vector2 имеет метод
В Godot класс Vector2 имеет метод bounce() для обработки этого. Вот пример GDScript приведённой выше диаграммы с использованием KinematicBody2D:
# object "collision" contains information about the collision
var collision = move_and_collide(velocity * delta)
if collision:
var reflect = collision.remainder.bounce(collision.normal)
velocity = velocity.bounce(collision.normal)
move_and_collide(reflect)
Скалярное произведение
Результат скалярного произведения очень важный аспект в векторной алгебре, но его также часто плохо понимают. Скалярное произведение это операция над двумя векторами которая возвращает скаляр. В отличии от вектора, который содержит длину и направление, скаляр содержит только длину.
Формула скалярного произведения имеет две распространённых формы:
и
Также, в большинстве случаев лучше использовать встроенный метод. Обратите внимание, что порядок двух векторов не имеет значения:
var c = a.
 dot(b)
var d = b.dot(a) # These are equivalent.
dot(b)
var d = b.dot(a) # These are equivalent.
Скалярное произведение очень полезно в использовании с единичными векторами, сокращая первую формулу до cosθ. Это означает что мы можем использовать скалярное произведение чтобы получить угол между двумя векторами:
Когда используются единичные вектора, результат будет всегда между -1 (180°) и«1« (0°).
Направление взгляда
Мы можем использовать этот факт для обнаружения, что объект смотрит в направлении другого объекта. На диаграмме ниже, игрок P пытается избежать взгляда зомби A и B. Могут ли зомби его увидеть если их угол обзора равен 180° ?
Зелёные стрелки fA и fB это единичные векторы представляющие направление взгляда зомби, а синий полукруг представляет их поле обзора. Для зомби A, мы находим направление вектора AP указывающего на игрока с помошью P - A и нормализуем его, однако, Godot имеет вспомогательный метод для этого, называемый direction_to. Если угол между этим вектором и вектором взгляда меньше 90°, то зомби может увидеть игрока.
Если угол между этим вектором и вектором взгляда меньше 90°, то зомби может увидеть игрока.
В коде это бы выглядело как:
var AP = A.direction_to(P)
if AP.dot(fA) > 0:
print("A sees P!")
Векторное произведение
Также как и скалярное произведение, векторное произведение это операция над двумя векторами. Но в результате векторного произведения вы получаете вектор с направлением перпендикулярным обоим исходным векторам. Его длина зависит от их относительного угла. Если два вектора параллельны, в результате вы получите нулевой вектор.
Векторное произведение вычисляется так:
var c = Vector3() c.x = (a.y * b.z) - (a.z * b.y) c.y = (a.z * b.x) - (a.x * b.z) c.z = (a.x * b.y) - (a.y * b.x)
В Godot, вы можете использовать встроенный метод:
var c = a.cross(b)
Примечание
В векторном произведении, порядок аргументов важен. a.cross(b) не даёт такого же результата что и b.cross(a). Получаемые векторы имеют противоположные направления.
Получаемые векторы имеют противоположные направления.
Расчитывание нормалей
Одно из применений для векторного произведения — это нахождение нормалей плоскости или поверхности в 3D пространстве. Если мы имеем треугольник ABC мы можем использовать векторное вычитание для нахождения граней AB и AC. Используя векторное произведение, AB x AC возвращает вектор перпендикулярный обоим векторам: нормаль поверхности.
Здесь показана функция для вычисления нормали треугольника:
func get_triangle_normal(a, b, c):
# find the surface normal given 3 vertices
var side1 = b - a
var side2 = c - a
var normal = side1.cross(side2)
return normal
Направление на цель
В скалярном произведении выше, мы видели как оно может использоваться для нахождения угла между двумя векторами. Однако для 3D этого недостаточно. Мы также должны знать вокруг какой оси нужно осуществлять вращение. (jфи) = 3,766*(Cos(фи) + j*Sin(фи)), где 180°<= фи<= 360°
(jфи) = 3,766*(Cos(фи) + j*Sin(фи)), где 180°<= фи<= 360°
Гость6
Всего 1 ответ.
С чего начать изучать физику? (Книги и прочее).
Pa Lan9
Источник: 16207s011.edusite.ru
Начинать нужно в любом случае с школьного курса физики. Забудьте про научпоп и читайте академические учебники. Например, в научпопе по физике до сих пор из книги в книгу гуляет неверная формула E = mc² и до сих пор пишут, что масса тела зависит от скорости.
Ладно, вернемся к учебникам. Лучшим школьным учебником физики на сегодня я считаю 5-томник под ред. Мякишева Г.Я.:
– Механика, 10 класс;
– Молекулярная физика и термодинамика, 10 класс;
– Электродинамика, 10-11 классы;
– Колебания и волны, 11 класс;
– Оптика. Квантовая физика, 11 класс.
Это тот минимум, без которого нельзя приступать к университетскому курсу. Так же, параллельно с физикой необходимо учить математику – в физике без математики делать нечего.
Очень хорош, свободно распространяемый в инете, учебник физики Яковлева И.В. Так же у этого автора есть много хороших методичек по математике и различным темам физики.
Еще обязательны методички ЗФТШ при МФТИ по математике и физике за 8-11 классы. Придется постараться, чтобы их найти, но найти их стоит. Чуть ли не половина студентов МФТИ учились в ЗФТШ при МФТИ .
Из учебников по математике советую:
– Погорелов А.В., Геометрия, 7-9 классы;
– Гордин Р.К., Планиметрия. Задачник, 7-9 классы;
– Калинин А.Ю., Терешин Д.А., Геометрия, 10-11 классы;
– Колмогоров А.Н. и др., Алгебра и начала математического анализа. Учебник для 10-11 кл.;
– А так же материалы по математике Яковлева и методички ЗФТШ при МФТИ, о которых я писал выше.
Совет напоследок. В физике, как и в математике, главное – это решение задач. Умение решения задач – это главный критерий усвоения материала. После каждого параграфа в учебнике нужно самостоятельно прорешивать все задачи.
Иван Мельников7
Всего 4 ответа.
Решить вопрос из физики?
Начальная фаза свободного гармонического колебания материальной точки равна нулю. Через какую долю периода скорость колеблющейся точки будет равна половине её максимальной скорости? Колебания совершаются по закону синуса.
Ответ должен получиться 1/6
bagera7
Уравнение колебания точки имеет следующий вид х = Asin(wt+фи(0)). Здесь А – амплитуда колебаний, w – частота колебаний и фи(0) – начальная фаза колебаний. К сожалению в БВ нельзя использовать греческие буквы, поэтому вместо омега я написал w и вместо греческой буквы фи так и написал по-русски фи. Начальная фаза колебаний равна нулю, то есть фи(0) = 0. Тогда уравнение наших колебаний будет таким
х = Asin(wt) (1)
В начальный момент времени при t = 0 имеем Asin(wt)= 0, тогда х(0) = 0. Я уже забыл, в каком классе проходят производные. Для того чтобы найти уравнение для скорости колебаний v, надо взять производную по времени из уравнения (1).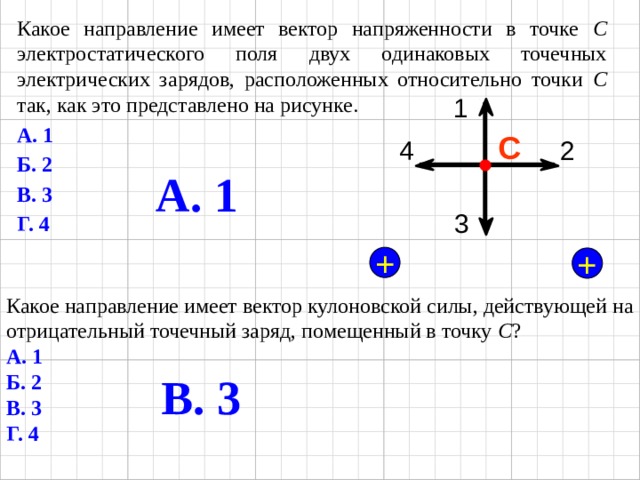 Получим
Получим
v = wAcos(wt) (2)
В начальный момент времени (t = 0), cos(wt) = 1. Скорость колебаний будет максимальной и равной v(макс) = wA. Один период колебаний = 2пи, где пи = 3,14 – это греческая буква пи.
Период колебаний обычно обозначается буквой Т. Имеем wТ = 2пи. Или период Т = 2пи/w. В задаче сказано, когда скорость точки станет равной половине максимальной скорости. То есть v = v(макс)/2 = wA/2 = 0,5wA. Из уравнения 2 надо найти это время t. Имеем
0,5wA = wAcos(wt). Отсюда находим cos(wt) = 0,5. Косинус равен 0,5 (или 1/2), когда wt = пи/3. Это уже из тригонометрии. Находим t = пи/3w. Но w = 2пи/Т. Тогда имеем
t = пи/3w = пиТ/(3*2пи) = Т/6, где * – знак умножения. Ответ: скорость колеблющейся точки будет равна половине её максимальной скорости при Т/6, то есть 1/6 от периода колебаний.
А это график гармонических колебаний
А здесь представлен график изменения скорости со временем. Здесь по вертикали надо отложить скорость v, а не х. И амплитуда равна wA, а не А.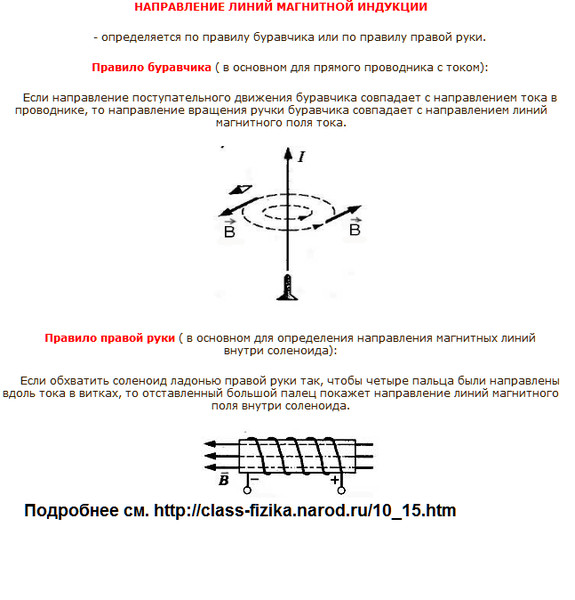
PavelR2
Всего 1 ответ.
Физика,
вал молотилки вращается с угловой скоростью 18 рад/с начинает тормозить с угловой скоростью 6 рад/с. через какое время вал остановиться, и сколько оборотов он сделает до полной остановки?Ородж Уружев1
это арифметикаval5
Всего 1 ответ.
Физика
Александр Иващин1
Для решения задачи воспользуемся законом сохранения момента импульса, т.к. сумма моментов сил тяжести и реакций на опору равны 0 в системе диск-человек:
J1 * w1 = J2 * w2 => w2/w1 = J1/J2, где
J1, J2 — моменты инерции;
w1, w2 — угловые скорости.
Т.к. масса человека в три раза меньше массы платформы, получим следующее:
• масса платформы — m;
• масса человека — m/3;
• R — радиус диска.
J1 = (m*R2)/2 + (m*R2)/3 = 5/6 * m*R2;
J2 = (m*R2)/2 + (m/3) * (R/2)2 = 7/12 * m*R2;
=> w2/w1 = ((5/6) * m * R2) / (7/12) * m*R2 = 10/7 = 1,43
Ответ: угловая скорость вращения платформы увеличиться в 1,43 раза.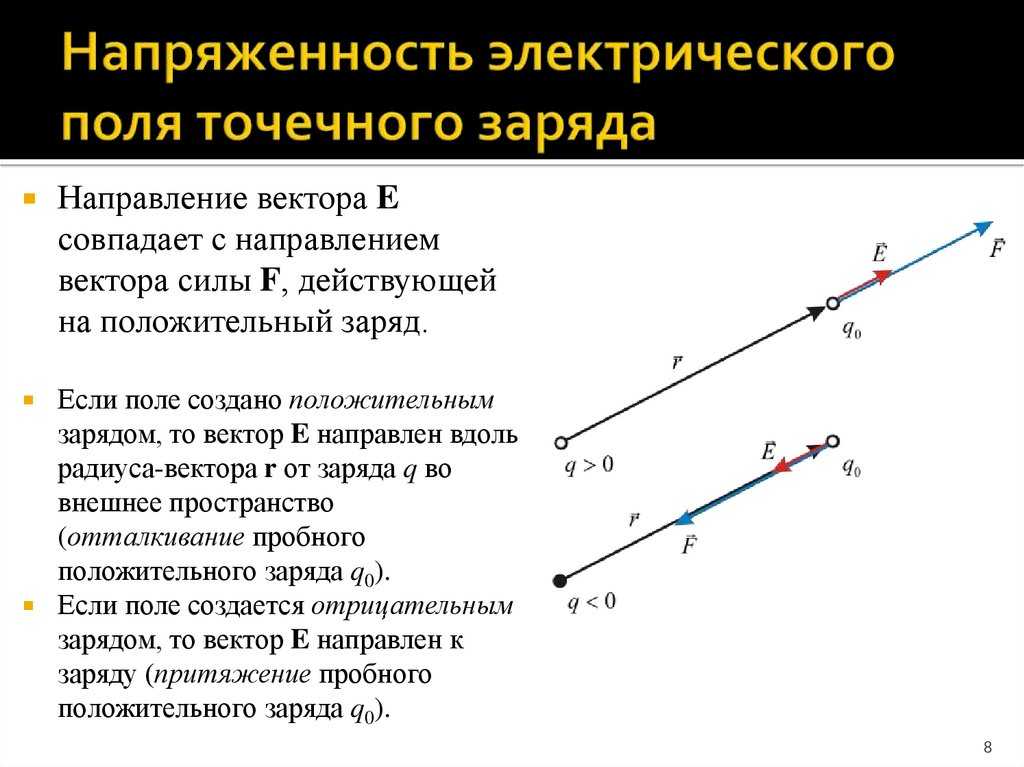
Александр IV9
J1 * w1 = J2 * w2 => w2/w1 = J1/J2, гдеJ1, J2 — моменты инерции;w1, w2 — угловые скорости.Т.к. масса человека в три раза меньше массы платформы, получим следующее:• масса платформы — m;• масса человека — m/3;• R — радиус диска.J1 = (m*R2)/2 + (m*R2)/3 = 5/6 * m*R2;J2 = (m*R2)/2 + (m/3) * (R/2)2 = 7/12 * m*R2;=> w2/w1 = ((5/6) * m * R2) / (7/12) * m*R2 = 10/7 = 1,43Верный ответ : в 1,43 раза.Мария О.6
Всего 2 ответа.
Как найти направление вектора: формула, примеры и советы ).insertBefore(«#quiz_container»),$(‘
‘).
insertBefore(«#newsletter_block_main»),ha(!0),b=document.getElementsByClassName(«scrolltomarker»),a=0;a
Скачать статью
Изучите эту статью
Скачать статью
Найти направление вектора в 2-мерной плоскости очень просто! Вам просто нужно немного тригонометрии. Компоненты x и y вектора образуют прямоугольный треугольник. Вы можете использовать функцию касательной, чтобы найти угол между осью X и вектором. Это руководство wikiHow покажет вам, как найти направление вектора, и рассмотрит четыре примера.
Компоненты x и y вектора образуют прямоугольный треугольник. Вы можете использовать функцию касательной, чтобы найти угол между осью X и вектором. Это руководство wikiHow покажет вам, как найти направление вектора, и рассмотрит четыре примера.
Вещи, которые вы должны знать
- Для этого метода хвост вектора будет расположен в начале координатной плоскости xy, а кончик будет в координате (X, Y).
- Используйте tan(𝛉) = Y/X, чтобы найти угол направления 𝛉 вектора. Примените арктангенс к обеим сторонам, чтобы найти 𝛉.
- Если ваш вектор находится во втором, третьем или четвертом квадранте, вам необходимо применить корректировку. Добавьте 180 градусов к вашему ответу для квадрантов II и III. Добавьте 360 для квадранта IV.
Шаги
-
1
Есть несколько терминов координатной плоскости, которые вам необходимо знать. Декартова двумерная координатная плоскость задает точки на плоскости путем назначения расстояний от начала координат.
- A 2-мерная плоскость представляет собой плоскую поверхность, состоящую из двух направлений, x и y. Он простирается бесконечно в направлениях x и y.
- Ось x — это горизонтальная линия, которая измеряет расстояние в пространстве в направлении x. Положительные значения указывают вправо от начала координат (положительная ось X), отрицательные — влево (отрицательная ось X).
- Ось Y — это вертикальная линия, которая измеряет расстояние в пространстве в направлении x. Он перпендикулярен оси x. Положительные значения указывают вверх от начала координат (положительная ось Y), отрицательные указывают вниз (отрицательная ось Y).
- Начало находится там, где пересекаются оси x и y. Он имеет координаты (0, 0).
-
Координаты — это местонахождение точки. Они записываются как (x, y), где x — это расстояние, которое вам нужно пройти в горизонтальном направлении, а y — это расстояние, которое вам нужно переместить в вертикальном направлении, чтобы добраться до точки из начала координат.
-
2
Вам также необходимо знать четыре квадранта. Квадранты — это четыре пространства на координатной плоскости, определяемые осями x и y.
- Пространство над осью x и справа от оси y является первым квадрантом . Все в этом квадранте является положительной величиной. Это верхнее правое пространство самолета.
- Затем квадранты упорядочиваются против часовой стрелки, начиная с первого квадранта.
- Итак, второй квадрант находится выше оси x и левее оси y.
- Третий квадрант находится ниже оси x и левее оси y.
- Четвертый квадрант находится ниже оси x и правее оси y.
Реклама
-
3
Векторы определяются двумя параметрами: величиной и направлением. Величина представлена длиной вектора. Направление — это направление, в котором вектор направлен в данной координатной плоскости.
[1]
Икс
Источник исследования
- Векторы часто изображаются в виде стрелок на координатной плоскости. Хвост вектора находится в начале плоскости.
- Например, двумерный вектор может иметь длину 3 и указывать на 45 градусов против часовой стрелки от положительной оси X.
- Примечание: в этом руководстве wikiHow обсуждаются векторы в 2-мерном пространстве, но эти принципы применимы и к 3-мерному пространству.
- Вы также можете ознакомиться с нашим руководством по нахождению величины вектора.
-
4
Существует два распространенных способа представления компонентов вектора. Можно использовать координаты или представление единичного вектора.
- Обозначение координат говорит вам, где находится кончик векторной стрелки. Его часто записывают в виде двух вертикально стоящих чисел в квадратных скобках. Координата x находится сверху, а y — снизу.
- Если вы их не знаете, вы можете разложить вектор на компоненты.
- Обозначение координат говорит вам, где находится кончик векторной стрелки. Его часто записывают в виде двух вертикально стоящих чисел в квадратных скобках. Координата x находится сверху, а y — снизу.
-
5
Представление единичного вектора представляет вектор как уравнение. Это также иногда называют инженерной записью. Уравнение
- и = Xî + Yĵ
- , где u — это вектор (это может быть любая буква и обычно имеет стрелку, указывающую прямо над буквой), X — это координата x, а Y — координата y.
- Например, u = 3î + 4ĵ будет вектором с вершиной, указывающей на координату (3, 4).


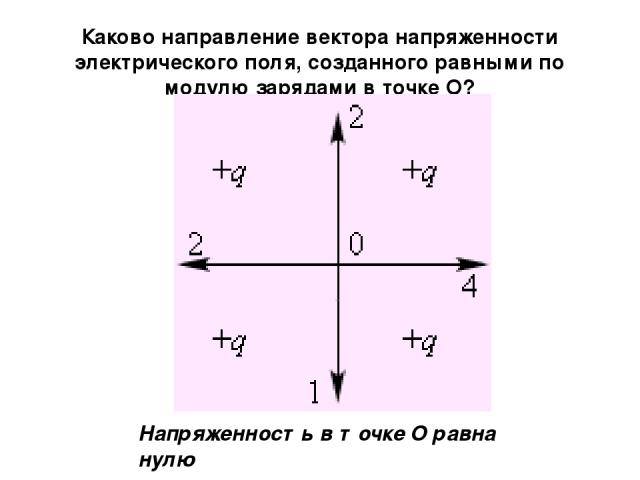 [1]
[1]
Реклама
-
1
Найдите угол 𝛉, который вы пытаетесь найти. Направление вектора можно определить как угол между положительной осью x и вектором. [2]
Икс
Источник исследования
- Найдите угол, начав с положительной оси x (0 градусов), а затем двигаясь против часовой стрелки, пока не дойдете до вектора.
- Вектор может указывать в плоскости в любом направлении от 0 до 360 градусов.
- Этот угол будет обозначаться как 𝛉 (греческий символ тета).
- Найдите угол, начав с положительной оси x (0 градусов), а затем двигаясь против часовой стрелки, пока не дойдете до вектора.
-
2
Определите треугольник, созданный вектором. Вектор определяется своими компонентами X и Y. Вы можете использовать эти два числа, чтобы сделать прямоугольный треугольник.
- Одна сторона треугольника будет на одной линии с осью x. Длина этой стороны X является компонентой X вектора. Мы будем называть это соседней стороной.
- Вторая сторона перпендикулярна оси x. Длина этой стороны Y является компонентой Y вектора. Мы будем называть это противоположной стороной.
- Третьей стороной треугольника является гипотенуза, а также сам вектор.
-
3
Используйте определение тригонометрической функции, тангенса. Тангенс (tan) определяется как [3]
Икс
Источник исследования
- tan(𝛉) = напротив/смежно
- где
- «противоположный» — это длина стороны, наиболее удаленной от угла 𝛉
- , а «прилегающая» — это длина стороны, ближайшей к углу 𝛉 (это не гипотенуза) 9-1 на калькуляторах. Это приведет к
- 𝛉 = арктангенс (Y/X)
- Чтобы решить это с помощью калькулятора, сначала разделите Y на X, затем нажмите кнопку арктангенса. Возможно, вам придется нажать клавишу Shift или 2-ю клавишу на вашем калькуляторе, чтобы получить доступ к функции арктангенса.
- Примечание: Убедитесь, что ваш калькулятор находится в режиме градусов (обычно помечен как «Deg»). Если вы находитесь в режиме радианов («Рад»), ответ будет в радианах, а не в градусах.
-
6
Примените корректировку угла, чтобы получить правильное измерение. Калькуляторы выводят только углы в первом и четвертом квадрантах (от отрицательных 90 градусов до положительных 90 градусов). Это потому, что калькулятор не оценивает, где находятся минусы при вычислении 𝛉. Чтобы получить правильный 𝛉 для каждого квадранта, вам нужно определить, в каком квадранте находится ваш вектор, а затем применить корректировку:
- Первый квадрант не нуждается в корректировке.
- Для векторов во втором квадранте функция арктангенса даст отрицательный угол, указывающий вниз и вправо (в четвертом квадранте). Этот угол направлен прямо против вектора, поэтому вам нужно добавить 180 градусов к углу, чтобы получить 𝛉.
- Для векторов в третьем квадранте функция арктангенса даст положительный угол, указывающий вверх и вправо (в первом квадранте). Этот угол направлен прямо против вектора, поэтому вам нужно добавить 180 градусов к углу, чтобы получить 𝛉. [4]
Икс
Источник исследования
- Для векторов в четвертом квадранте функция арктангенса даст отрицательный угол, указывающий вниз и вправо (в четвертом квадранте). Этот угол указывает в правильном направлении, но угол отрицательный (отсчитывается по часовой стрелке от положительной оси x), а не положительный (отсчитывается против часовой стрелки от положительной оси x). Вам нужно добавить 360 градусов к углу, чтобы получить 𝛉.
- Первый квадрант не нуждается в корректировке.
Объявление

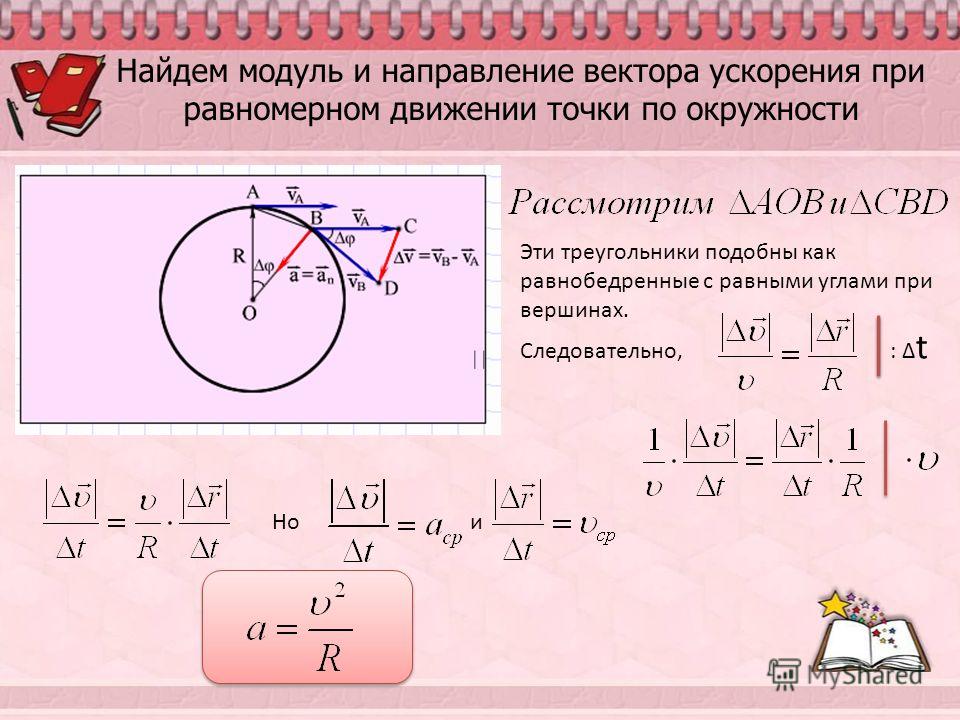 Это приведет к
Это приведет к

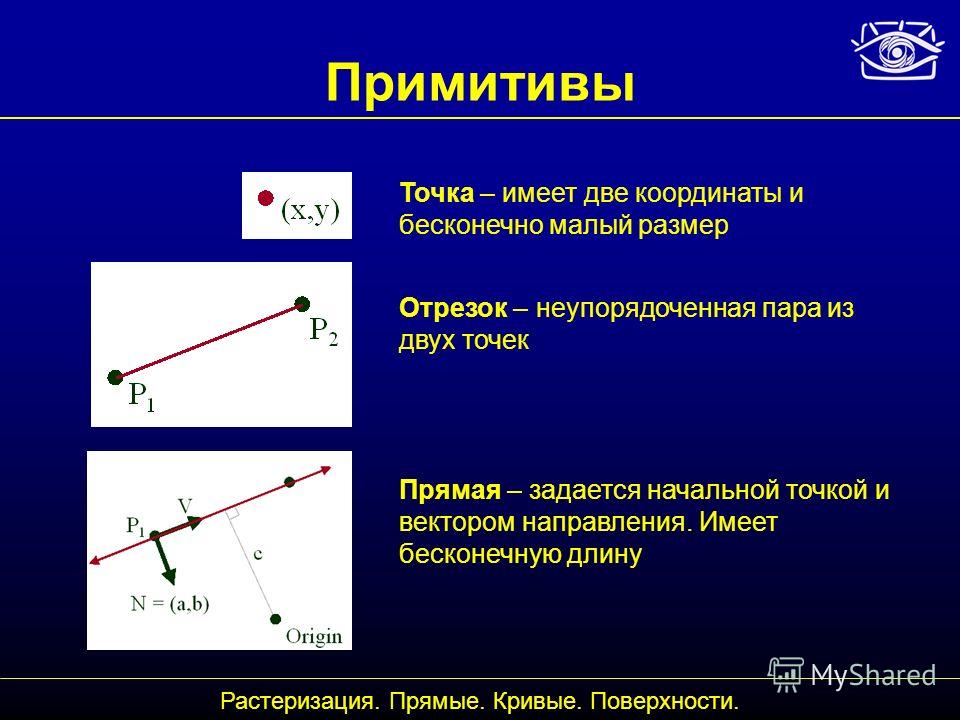
-
Есть несколько случаев, когда вам не нужно использовать тригонометрию, чтобы найти угол вектора. Это случаи, когда угол вектора очевиден, если посмотреть на него на графике.
- Если один из компонентов вектора x или y равен 0 , то вектор указывает прямо на оси.
- Например, если у вас есть вектор u = 0î + 5ĵ, вектор указывает прямо вверх вдоль положительной оси y. Это означает, что угол равен 9.0 градусов, так как ось Y перпендикулярна оси X.
- Если компоненты вектора x и y имеют одно и то же число , вектор указывает с шагом 45 градусов.
- Например, если у вас есть вектор u = -3î + 3ĵ, вектор указывает вверх и влево на 45 градусов против часовой стрелки от положительной оси y. Поскольку оси перпендикулярны, мы можем добавить 90 градусов (положительная ось x к положительной оси y) плюс 45 градусов, чтобы получить 135 градусов.
-
Вот пошаговый пример вектора в первом квадранте.
- Вам дан вектор u = 2х + 5х
- Вставить компоненты в уравнение касательной tan(𝛉) = Y/X
- загар(𝛉) = 5/2
- 𝛉 = арктангенс (5/2)
- 𝛉 = арктангенс (2,5)
- 𝛉 = 68,20 градусов
Реклама
-
Вот пошаговый пример вектора во втором квадранте.
- Вам дан вектор u = -3х + 6х
- Вставить компоненты в уравнение касательной tan(𝛉) = Y/X
- загар(𝛉) = 6/-3
- 𝛉 = арктангенс (6/-3)
- 𝛉 = арктангел (-2)
- 𝛉 = -63,43 градуса
- Этот угол указывает в четвертом квадранте. Примените корректировку, чтобы получить угол вектора.
- 𝛉 = -63,43 + 180
- 𝛉 = 116,57
-
Вот пошаговый пример вектора в третьем квадранте.
- Вам дан вектор u = -1х + -7х
- Вставить компоненты в уравнение касательной tan(𝛉) = Y/X
- загар(𝛉) = -7/-1
- 𝛉 = арктангенс (-7/-1)
- 𝛉 = арктангенс (7)
- 𝛉 = 81,87 градуса
- Этот угол указывает в первом квадранте. Примените корректировку, чтобы получить угол вектора.
- 𝛉 = 81,87 + 180
- 𝛉 = 261,87

Реклама
-
Вот пошаговый пример вектора в четвертом квадранте.
- Вам дан вектор u = 12х + -4х
- Вставить компоненты в уравнение касательной tan(𝛉) = Y/X
- загар(𝛉) = -4/12
- 𝛉 = арктангенс (-4/12)
- 𝛉 = арктангенс (-0,33)
- 𝛉 = -18,43 градуса
- Этот угол указывает в четвертом квадранте, но является отрицательным. Примените корректировку, чтобы получить положительный угол вектора.
- 𝛉 = -18,43 + 360
- 𝛉 = 341,57
Поиск
Добавить новый вопрос
- ↑ https://www.youtube.com/watch?v=fNk_zzaMoSs
- ↑ https://www.youtube.com/watch?v=A3OuFLHum6w
- ↑ https://mathworld.wolfram.com/SOHCAHTOA.html#:~:text=%22SOHCAHTOA%22%20is%20a%20helpful%20mnemonic,(1)
- ↑ https://www.youtube.com/watch?v=EX0Ha42WQ24
- Печать
- Отправить фанатскую почту авторам
- Описание суммы двух векторов
- Метод 1. Вычисление равнодействующей по закону косинусов и синусов
- Метод 2 — вычисление результирующего с использованием векторных компонентов
- Закон косинусов
- Закон синусов
- Компоненты
- Если окно апплета не пусто, очистите его, нажав «Сброс».
(). - Введите первый вектор, 1 ,
с величиной 100 под углом 60° в полярной области (положительно)
Режим (). - Введите второй вектор, 2 ,
с величиной 130 под углом 140° в полярной (положительной)
Режим ()
и перетащите оба вектора в центр экрана. - После ввода двух векторов щелкните переключатель «Показать
Resultant», чтобы отобразить результирующую (сумму векторов). Если вы
использовать полярный (позитивный) режим ()
в результате вы должны увидеть экран, аналогичный рисунку 1. - Метод сложения векторов «кончик к хвосту»
- Параллелограммный метод сложения векторов
- Величина и полярное (положительное) направление равнодействующей ()
составляет (________ , ________ град) - Величина и навигационное направление равнодействующей ()
это (________ , ________ E из N ) - Декартовы компоненты результирующей () равны (________
, ________) - Метод 1 использует закон косинусов для нахождения результирующей величины и
Закон синусов
для результирующего направления. - Метод 2 использует компоненты вектора для получения как результирующей магнитуды, так и
направление. Каждый метод представлен ниже. - Использование векторной диаграммы и тригонометрических функций для преобразования векторов в компоненты
форма. - Сложите компоненты (x всего = x 1 + x 2 ) и (y всего
= у 1 + у 2 ). Не забудьте включить положительные или
негативные направления. - Нарисуй
результирующий
вектор с помощью
компонент x всего и компонент y всего . Запомнить
включать положительные или отрицательные направления. - Рассчитайте результирующую величину по теореме Пифагора (c 2
= а 2 + б 2 ). - Вычислите направление, используя соответствующую тригонометрическую функцию (тангенс
функция).
Задать вопрос
Осталось 200 символов
Укажите свой адрес электронной почты, чтобы получить сообщение, когда на этот вопрос будет дан ответ.
Отправить
Реклама
Отправить
Спасибо, что отправили совет на рассмотрение!
Реклама
использованная литература
Об этом изделии
Спасибо всем авторам за создание страницы, которую прочитали 5 раз.
Реклама
7. Векторы в трехмерном пространстве
На этой странице…
Величина трехмерного вектора
Добавление трехмерных векторов
Скалярное произведение трехмерных векторов
Косинусы направления
Угол между векторами
Заявка
Ранее мы видели, как представлять двумерные векторы на плоскости x — y .
Теперь мы расширим идею представления трехмерных векторов с помощью осей x — y — z . (См. 3-мерную систему координат для получения дополнительной информации об этом).
Пример
Вектор OP имеет начальную точку в начале координат O (0, 0, 0) и конечную точку в P (2, 3, 5). Мы можем нарисовать вектор 92) = 6,16 «единиц» `
Добавление трехмерных векторов
Ранее мы видели, как добавлять двумерные векторы. Теперь мы расширим эту идею для трехмерных векторов.
Мы просто добавляем компоненты и , затем компоненты j и, наконец, компоненты k .
Пример 1
Два якоря удерживают корабль на месте, и их силы, действующие на корабль, представлены векторами A и B следующим образом:
A = 2 i + 5 j − 4 k и B = −2 i − 3 j − 5 k
Если бы мы заменили 2 привязки на 1 привязку, какой вектор представляет этот единственный вектор?
Ответить
Задача просто требует, чтобы мы сложили векторы, чтобы получить единственный результирующий вектор.
А + В
= (2 + −2) i + (5 − 3) j + (−4 − 5) k
= 0 i + 2 j − 9 k
= 2 j − 9 k
Скалярное произведение трехмерных векторов
Чтобы найти скалярное произведение (или скалярное произведение) трехмерных векторов, мы просто расширим идеи скалярного произведения в двух измерениях, с которыми мы познакомились ранее.
Пример 2. Скалярное произведение с использованием величины и угла
Найдите скалярное произведение векторов P и Q , если угол между двумя векторами равен 35° и
.
| Р | = 25 единиц с и | Q | = 4 шт.

Ответить
Используя нашу формулу для скалярного произведения:
P • Q = |P| |В| потому что θ
у нас есть:
П • Q
= |П| |В| потому что θ
= 25 × 4 × cos 35°
= 81,92
Пример 3. Скалярное произведение, если векторы кратны единичным векторам
Найдите скалярное произведение векторов A и B (они взяты из нашего примера с якорем выше):
A = 2 i + 5 j − 4 k и B = −2 i − 3 j − 5 k
Ответить
А • В
= (2 i + 5 j − 4 k ) • (−2 i − 3 j − 5 k )
= (2 × −2) + (5 × −3) + (−4 × −5)
= -4 + -15 + 20
= 1
Направление косинусов
Предположим, у нас есть вектор OA с начальной точкой в начале координат и конечной точкой в A.
Предположим также, что у нас есть единичный вектор в том же направлении, что и OA . (Идите сюда для напоминания об единичных векторах).
Пусть наш единичный вектор будет:
u = u 1 i + u 2 j + u 3 k
На графике u — это единичный вектор (черный), указывающий в том же направлении, что и вектор OA , а i , j и k (единичные векторы в x-, y- и z- направления соответственно) отмечены зеленым цветом.
Теперь мы увеличим вектор u и немного изменим ориентацию следующим образом:
Теперь, если на схеме выше
α — угол между u и осью x (темно-красный),
β — угол между u и осью y (зеленый) и
γ — угол между u и ось z (розовые),
, то мы можем использовать скалярное произведение и написать:
у 1
= и • i
= 1 × 1 × cos α
= cos α
и 2
= и • й
= 1 × 1 × cos β
= cos β
у 3
= и • к
= 1 × 1 × cos γ
= cosγ
Таким образом, мы можем записать наш единичный вектор u как:
u = cos α i + cos β j + cos γ k
Эти 3 косинуса называются косинусами направления .
Угол между трехмерными векторами
Ранее мы видели, как найти угол между двумерными векторами. Мы используем ту же формулу для трехмерных векторов:
`theta=arccos((P * Q)/(|P||Q|))`
Пример 4
Найдите угол между векторами P = 4 i + 0 j + 7 k и Q = -2 i + j + 3 k .
Ответить
Векторы P и Q выглядят следующим образом. Вектор P находится на плоскости x — z (обратите внимание, что значение y для вектора P равно `0`), а Q находится «позади» y — z самолет .
По формуле
`тета=arccos((P*Q)/(|P||Q|))`
у нас есть:
92) `
`= квадрат (65) квадрат (14)`
`=30.
Так
θ = arccos(13 ÷ 30,166)
Следовательно, угол между векторами P и Q равен
θ = 64,47°
Упражнение
Найдите угол между векторами P = 3 i + 4 j − 7 k и Q = -2 i + j + 3 к .
Ответить
Используя формулу
`тета=arccos((P*Q)/(|P||Q|))`
сначала находим скалярное произведение:
П • Q
= (3 i + 4 j − 7 j ) • (−2 i + j + 3 k)
= (3 × −2) + (4 × 1) + (−7 × 3)
= −23
 166 «единиц»`
166 «единиц»` А теперь знаменатель:
|П| |В|
= √(3 2 + 4 2 + (−7) 2 ) × √((−2) 2 + 1 2 + 3 0 3 4)
= 32,187
Так
θ = arccos(−23 ÷ 32,187)
Следовательно, угол между векторами P и Q это
θ = 135,6°
Применение
У нас есть куб ABCO PQRS, у которого есть строка вдоль диагонали куба от B до S, а другая — вдоль другой диагонали от C до P
Какой угол между двумя струнами?
Ответить
Для удобства предположим, что у нас есть куб единиц (каждая сторона имеет длину 1 единицу) и мы размещаем его так, что один угол куба находится в начале координат.
единичных векторов i , j и k действуют в направлениях x -, y — и z соответственно. Итак, на нашей диаграмме, поскольку у нас есть единичный куб,
ОА = i
OC = j
OS = k
Из диаграммы видно, что для перемещения из B в S нам нужно пройти -1 единицу в направлении x , -1 единицу в направлении y и вверх на 1 единицу в з -направление. Так как у нас есть единичный куб, мы можем написать:
БС = −i − j + k
и аналогично:
CP = i − j + k
Скалярное произведение для векторов BS и CP :
БС • СР = |БС| |КП| потому что θ
, где θ — угол между BS и CP 9.
`= (кв.3)(кв.3)`
= 3
 2)`
2)`
Так
`θ = arccos (1/3)`
θ = 70,5°
Таким образом, угол между струнами равен «70,5°». (В этой ситуации мы предполагаем, что «угол» относится к острому углу между струнами.)
Нужна помощь в решении другой графической задачи? Попробуйте решение проблем.
Отказ от ответственности: IntMath.com не гарантирует точность результатов. Решатель задач предоставлен Mathway.
Урок 1 — Сложение векторов: Числовое
Урок 1 — Сложение векторов: Числовое
Сложение векторов: числовое
вычисляет величину и направление результирующей по величинам и направлениям
произвольное количество добавляемых векторов.
Предпосылки
Учащиеся должны понимать векторные свойства величины и направления и быть
знаком с графическим сложением векторов методом Tip-to-Tail. Они также должны иметь
знание основ тригонометрии.
Результаты обучения
Учащиеся научатся вычислять величину и направление суммы
два вектора (результат) с учетом величин и направлений двух векторов
быть добавленным. Они научатся использовать закон косинусов и закон синусов для этой цели. Они также будут
научиться вычислять сумму двух векторов с помощью компонентов.
Инструкции
Учащиеся должны понимать функции апплета, описанные в Help и ShowMe.
Апплет должен быть открыт. Пошаговые инструкции на этой странице предназначены для
сделать в апплете. Возможно, вам придется переключаться между инструкциями
и апплет, если место на экране ограничено.
Содержимое
Приложение
Представьте, что вы снова входите в атмосферу на космическом корабле. Чтобы
Чтобы
благополучно посадить шаттл, пилот должен сделать точный заход на взлетно-посадочную полосу.
Для этого пилоту необходимо знать точную скорость шаттла относительно
на землю всегда. При входе в атмосферу шаттл движется со скоростью 130 м/с.
под углом 140° относительно воздуха при попадании в струйный поток (большая высота,
глобальная циркуляция воздуха), который движется со скоростью 100 м/с под углом 60° относительно
земля. Какова скорость челнока относительно земли после входа в
струйный поток? У вас может возникнуть соблазн сказать, что 100 м/с + 130 м/с = 230 м/с.
Однако это было бы неправильно. Скорость является векторной величиной и поэтому
две скорости должны быть добавлены как векторы. Апплет будет использоваться для иллюстрации
как правильно складываются два вектора.
Апплет будет использоваться для определения скорости челнока относительно
земля при повторном входе.
Рисунок 1
Согласно апплету, скорость шаттла относительно земли
при повторном входе будет 177,24 м/с при 106,25° в полярно-положительном режиме.
Обведите правильный ответ ниже. Графическое построение результирующего
на Рисунке 1 показан
Результат упражнения 1 может отображаться в трех режимах.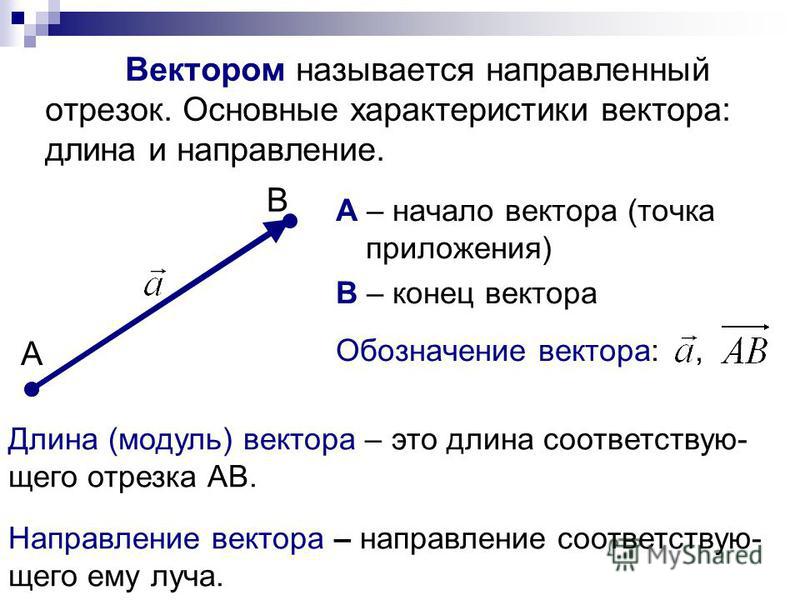 Щелкните режим
Щелкните режим
кнопка управления ()
для равнодействующей, , три раза и цикла
в «декартовский» режим ().
В этом режиме результирующие компоненты x- и y- ( r x , r y )
отображаются, как показано на рис. 2.
| Кнопка | Режим | Пример |
| Величина и полярное положительное направление (r,θ) | ||
| Величина и навигационное направление (r,θ E из N ) |
||
| Декартовы компоненты ( r x , r y ) |
Используя кнопку управления режимами, опишите скорость челнока относительно
землю, используя все три режима.
Как вычисляется результат? Его можно найти с помощью двух разных
методы.
|
Для расчета величины и направления равнодействующей Рисунок 2 Мы хотим вычислить величину r результирующего Закон косинусов используется для вычисления величины ( r ) |
| Согласно рисунку 2 закон косинусов можно использовать для расчета величина ( r ) результирующего вектора: (Примечание: угол, противоположный вектору |
|
Закон синусов можно использовать для расчета направления Чтобы применить закон синусов, соедините угол (α) с противоположной стороной величины ( v 2 ) Следовательно, результирующий вектор имеет величину 177,24 под углом |
 Угол направления θ равнодействующей в
Угол направления θ равнодействующей в Используя закон косинуса и синусов, вычислите результирующую (сумму) следующих
два вектора. Добавьте векторы в апплет, чтобы увидеть правильное отношение кончика к хвосту.
Добавьте векторы в апплет, чтобы увидеть правильное отношение кончика к хвосту.
векторную диаграмму и проверить полученную.
1 = 150, полярная ориентация 50° (положительная)
2 = 200, полярная ориентация 150° (положительная)
|
Векторная диаграмма от кончика до хвоста: |
Результирующая звездная величина (r): |
Результирующее направление (θ): (Используйте |
Используя закон косинуса и синусов, вычислите результирующую (сумму) следующих
два вектора. Добавьте векторы в апплет, чтобы увидеть правильное отношение кончика к хвосту.
векторную диаграмму и проверить полученную.
1 = 100, полярная 150° (положительная)
2 = 75, полярная 250° (положительная)
|
Векторная диаграмма от начала до конца: |
Результирующая звездная величина (r): |
Результирующее направление (θ): (Используйте |
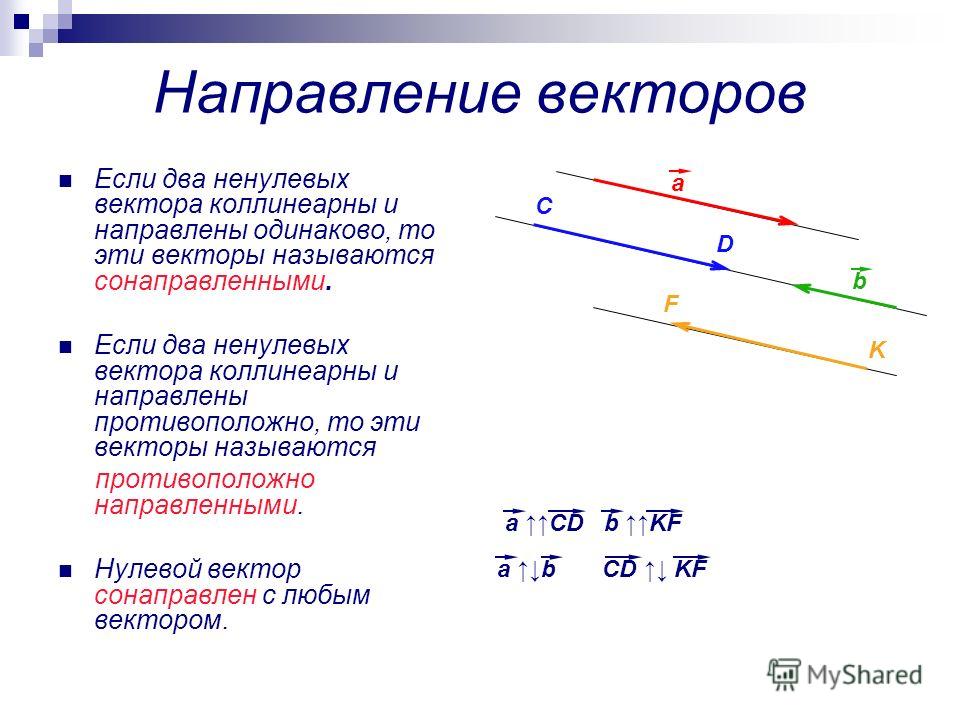 )
) | Теперь посчитаем сумму тех же двух векторы 1 и 2 как и в предыдущем разделе, но на этот раз с использованием компонентов. Для следующих расчетов вам необходимо знать (скалярные) компоненты Особенно легко, если векторы уже заданы в терминах Углы измеряются в полярной (положительной) спецификации (или навигационной N Рисунок 3 Величина и направление 1 и 2 v 1 = 100, θ 1 v 2 = 130, θ 2 |
|||||||||
|
Сложить два вектора означает сложить соответствующие компоненты. r x = v 1x + v 2x г г = v 1 г + v 2 г |
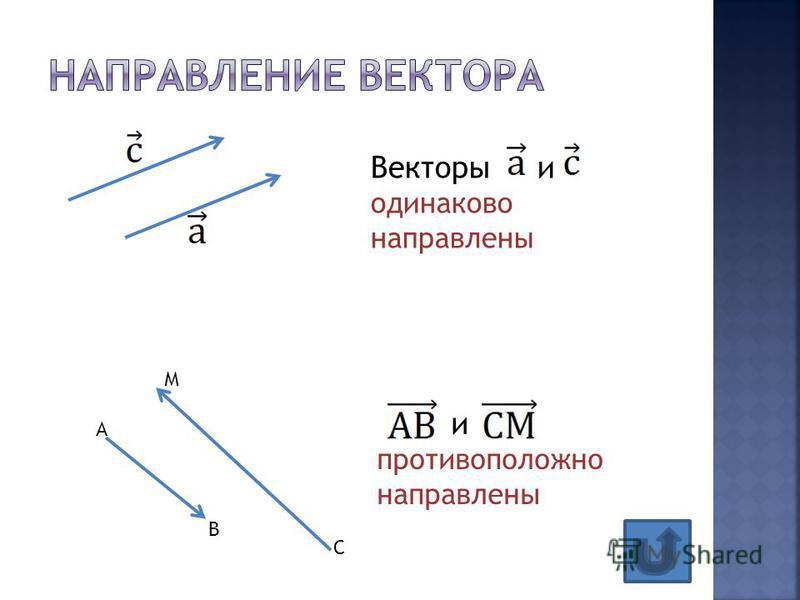
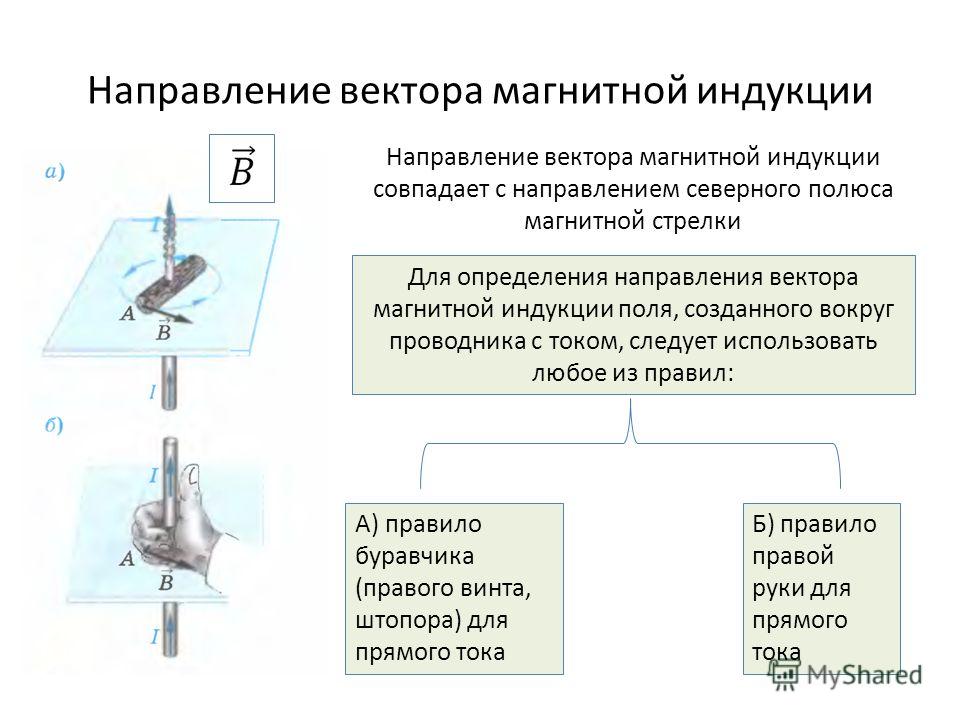 Если
Если Вы можете указать результат с точки зрения компонентов и остановить
расчет на данный момент. Однако, если величина и угол направления
необходимы результирующие, их можно рассчитать из компонентов следующим образом.
|
Опять же, очень полезно сделать схему для иллюстрации Рисунок 4 |
|
Треугольник, образованный вектором |
| Из рисунка 4 видно, что направление может быть рассчитывается по определению тангенса угла. Это означает, что для направления угла значения Следовательно, результирующий вектор равен 177,24 при 106,25° в полярной |
 См. рис. 4 ниже.
См. рис. 4 ниже.
Таким образом, если два вектора 1 и 2
даны в терминах величины и направления, результирующая может быть вычислена
выполнив следующие действия:
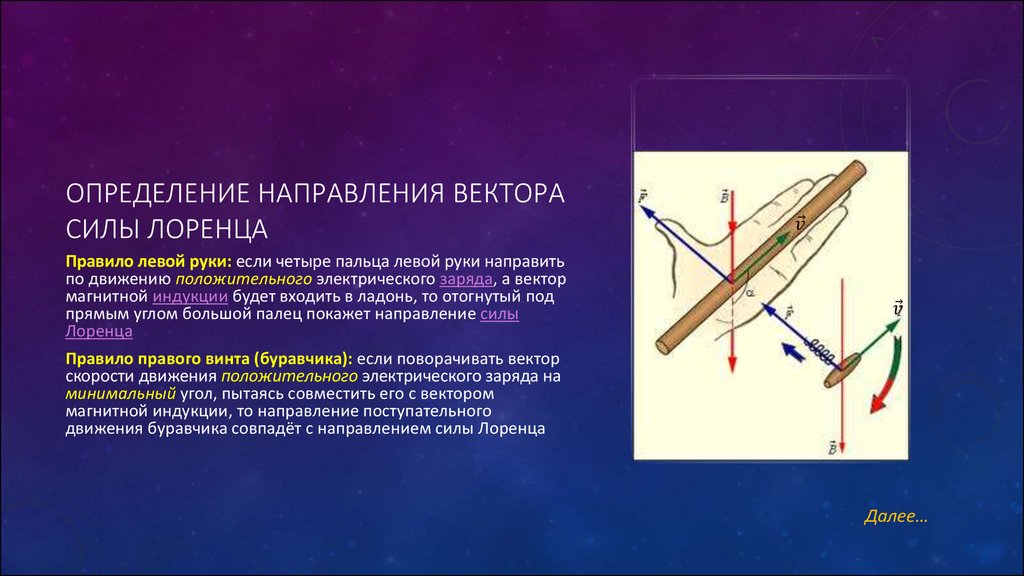
Это может быть немного больше работы, чем вычисление результата с использованием закона
Косинусы и закон синусов, как это было сделано в предыдущем разделе. Однако,
если два вектора 1 и 2
уже даны в компонентной форме, и если кто-то хочет получить результирующий компонент
Кроме того, как это часто бывает, расчет проще.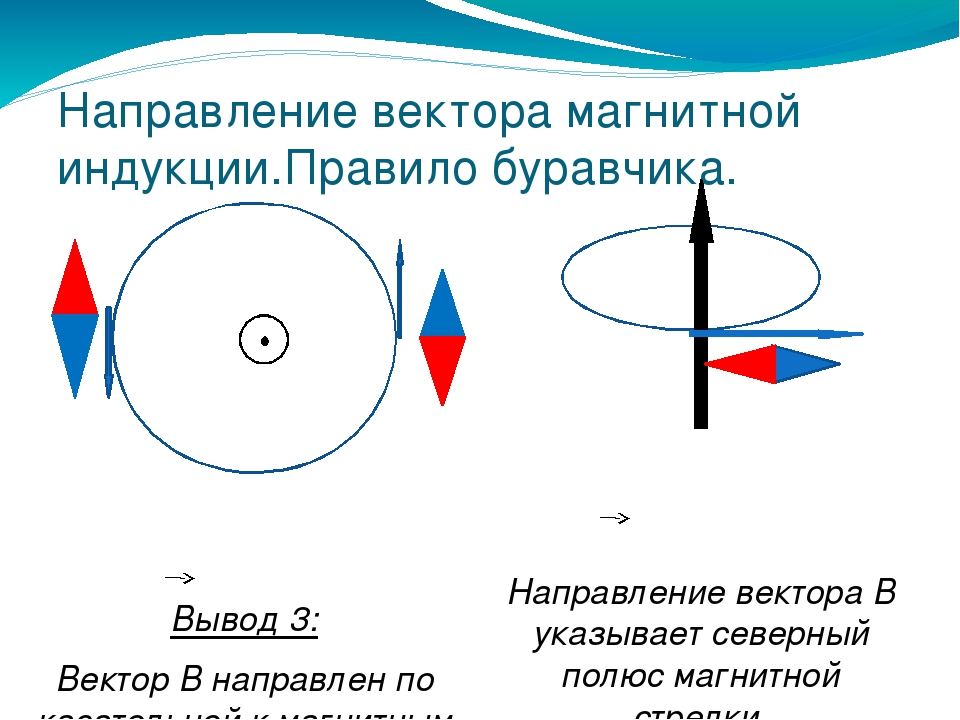
Используя метод компонентов, рассчитайте результирующую (сумму) следующих
два вектора. Покажите все необходимые расчеты и диаграммы ниже и определите
направление с использованием полярной (положительной) спецификации. Добавьте векторы на
апплет для проверки результирующей величины и направления.
1 = 175, 70° полярная (положительная)
2 = 200, 200° полярная (положительная)
|
а. Векторная диаграмма и расчет компонентов для 1 . |
б. Векторная диаграмма и расчет компонентов для 2 . |
в. Сложение компонентов и рисование результирующего вектора.
д. Вычисление результирующей величины по теореме Пифагора.
эл. Вычисление результирующего направления с помощью функции касательной. Выражать
направление с точки зрения полярной (положительной) спецификации.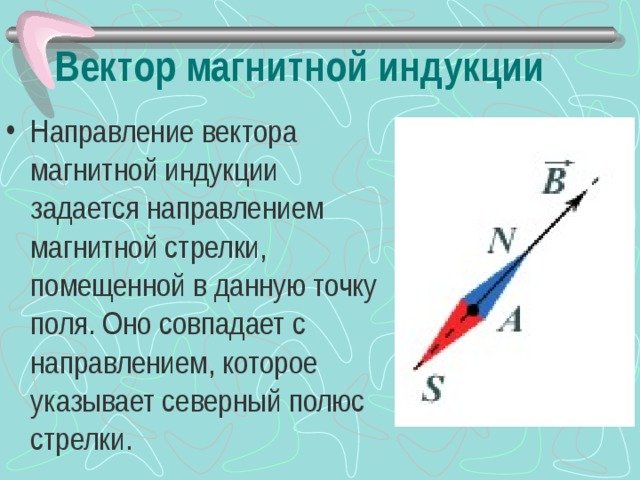
Используя метод компонентов, рассчитайте результирующую (сумму) следующих
два вектора. Показать все необходимые расчеты и диаграммы и указать направление
используя полярную (положительную) спецификацию. Добавьте векторы в апплет по порядку
чтобы проверить результирующую величину и направление.
1 = 185, полярная 45° (положительная)
2 = 95, полярная 320° (положительная)
| а. Векторная диаграмма и расчет компонентов для 1 . |
б. Векторная диаграмма и расчет компонентов для 2 . |
в. Сложение компонентов и рисование результирующего вектора.
д. Вычисление результирующей величины по теореме Пифагора.
эл. Вычисление результирующего направления с помощью функции касательной. Выражать
направление с точки зрения полярной (положительной) спецификации.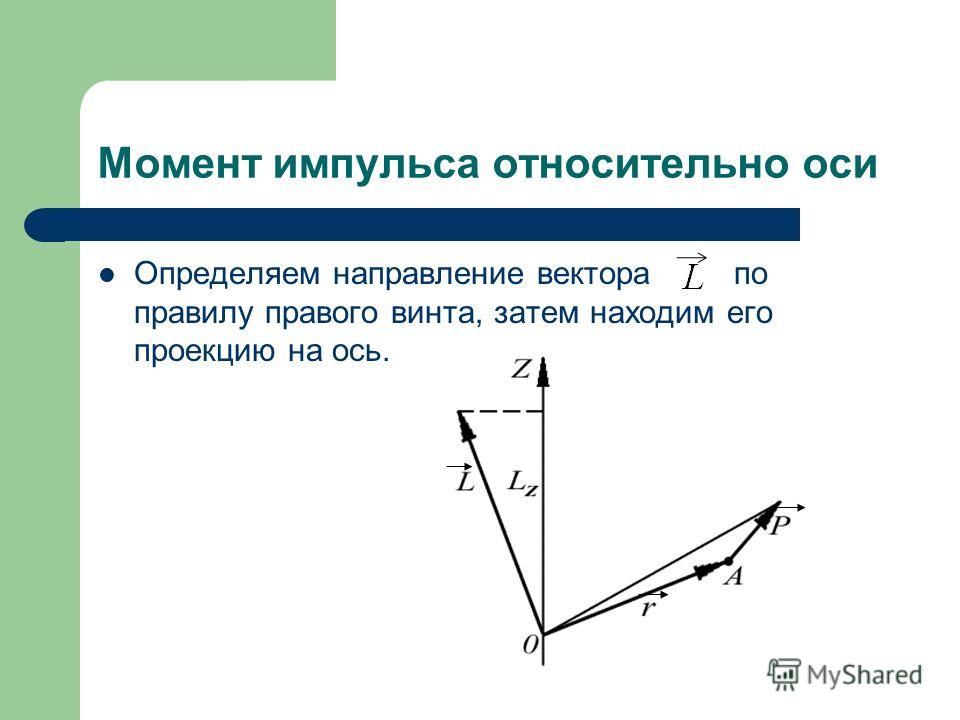
Используя метод компонентов, рассчитайте результирующую (сумму) следующих
два вектора. Покажите все необходимые расчеты и диаграммы ниже и определите
направление с использованием полярной (положительной) спецификации. Добавьте векторы на
апплет для проверки результирующей величины и направления.
1 = (+135, -120) — компоненты
2 = (-200, -45) — компоненты
а. Сложение компонентов и отрисовка результирующего вектора:
б. Расчет результирующей величины по теореме Пифагора:
в. Вычисление результирующего направления с использованием функции касательной: (выражение
направление с точки зрения Полярной (позитивной) спецификации)
Приложение
| Закон косинусов — это общее уравнение, связывающее три стороны и один угол в треугольнике. На треугольники ограничений нет. форма. Три элемента определяют треугольник. 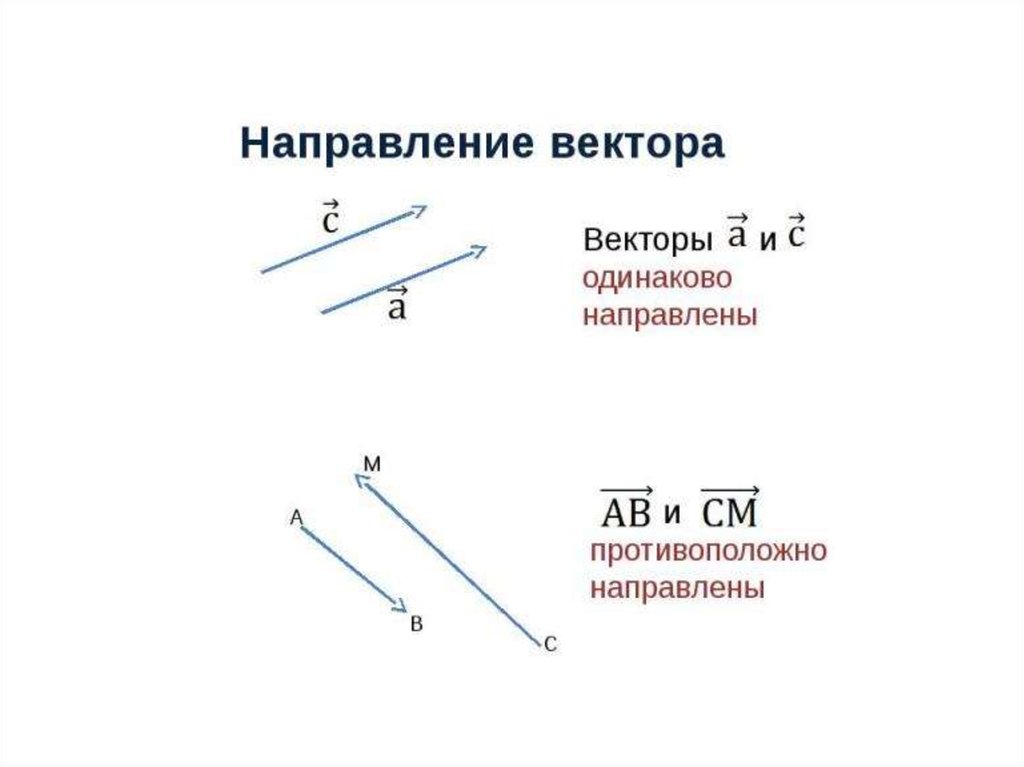 Если любые три из четырех элементов Если любые три из четырех элементовв уравнении косинусов приведены, уравнение позволяет вычислить четвертый. На рисунке A1 показан обычный треугольник. Три стороны обозначены Рисунок A1 |
Есть три уравнения закона косинусов, в зависимости от того, какой угол включен:
в 2 = а 2 + б 2
— 2 аб cos γ (A1)
а 2 = б 2 + в 2
— 2 до н.э. соз α (A2)
б 2 = в 2 + а 2
— 2 ca cos β (A3)
Обратите внимание, что теорема Пифагора является частным случаем этих уравнений, если
углов равен 90°. Например, если γ = 90°, то cos
Например, если γ = 90°, то cos
γ = 0 и уравнение (A1) сводится к теореме Пифагора:
в 2 = а 2 + б 2
(А4)
Также обратите внимание на знак минус перед косинусом в этих уравнениях. Этот
имеет следующий эффект. Рассмотрим уравнение (1). Если γ < 90°
, косинус положительный. Со знаком минус перед косинусом уравнение
(A1) дает значение для c, которое меньше, чем значение, данное формулой Пифагора.
теорема (4). Если γ > 90°, косинус отрицателен. В сочетании с
знак минус перед членом косинуса, член теперь вносит положительный вклад
к правой части уравнения (1), что дает значение c, которое больше
чем тот, который дает теорема Пифагора.
В нем говорится, что отношение «синуса угла к длине
противоположная сторона» одинакова для любой пары угла и противоположной стороны.
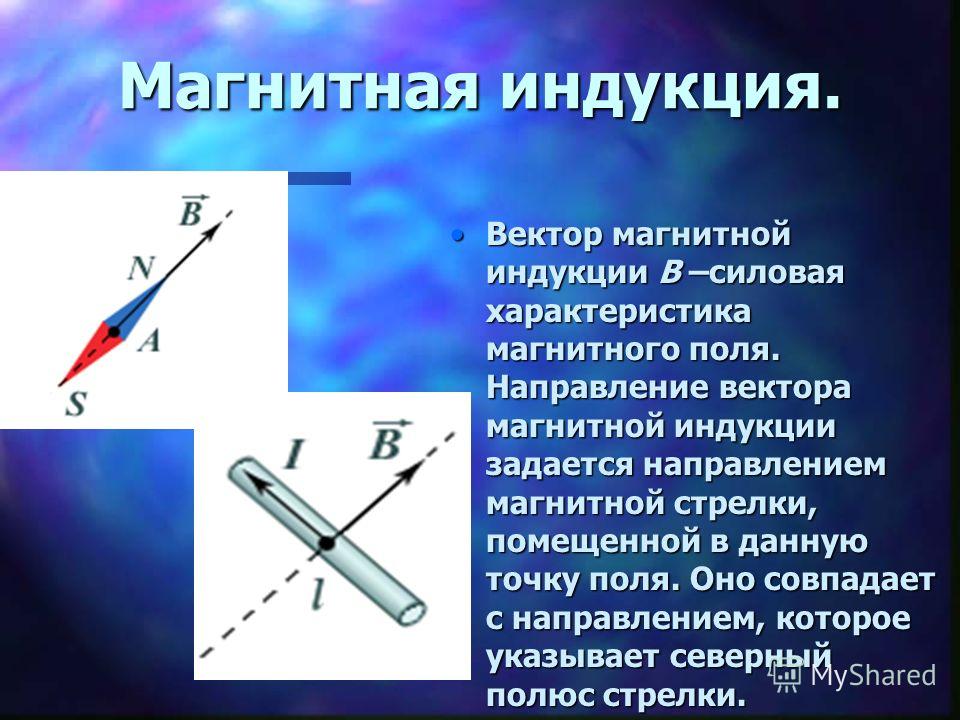
На рисунке A2 показан обычный треугольник. Три стороны обозначены
a , b , c , а три угла обозначены α,
в, у.
Рисунок A2
Уравнения закона синусов:
(А5)
Треугольник определяется тремя его элементами. Даны две стороны и
угол, противоположный одной из сторон, закон синусов позволяет определить угол, противоположный
Обратная сторона.
Векторы можно описать с помощью их скалярных компонент. Вектор
в двух измерениях имеет два скалярных компонента, один вдоль оси x
и один вдоль оси y . Для вектора ,
эти компоненты обозначены a x и a y ,
соответственно. Рисунок A3 иллюстрирует компоненты вектора
то есть в первом квадранте.
Рисунок A3
скалярных компонентов вектора являются проекциями вектора
на оси x и y . На рисунке A3 они показаны зеленым цветом.
На рисунке A3 они показаны зеленым цветом.
и желтый соответственно. Они называются скалярными компонентами, потому что они
являются числами. Скалярные компоненты равны x и y .
координаты вершины вектора, если хвостовая часть вектора
в начале системы координат, как здесь.
Вектор на рисунке A3 имеет модуль 8 и угол θ с
положительный x — ось равна 30°. Его скалярные компоненты имеют значения:
a x = 6,93, a y = 4,00 (A6)
Для векторов в первом квадранте обе компоненты положительны, но для векторов
в одном из трех других квадрантов один или оба компонента отрицательны. За
например, с вектором во втором квадранте x — компонент отрицательный
в то время как y -компонента остается положительной.
Из определения синуса и косинуса следует, что:
a x = a cos θ, a y
= a sin θ (A7)
Подстановка на = 8,00 и θ = 30,0° в эти уравнения дает
значения, перечисленные в уравнениях (A6) и показанные на рисунке A3.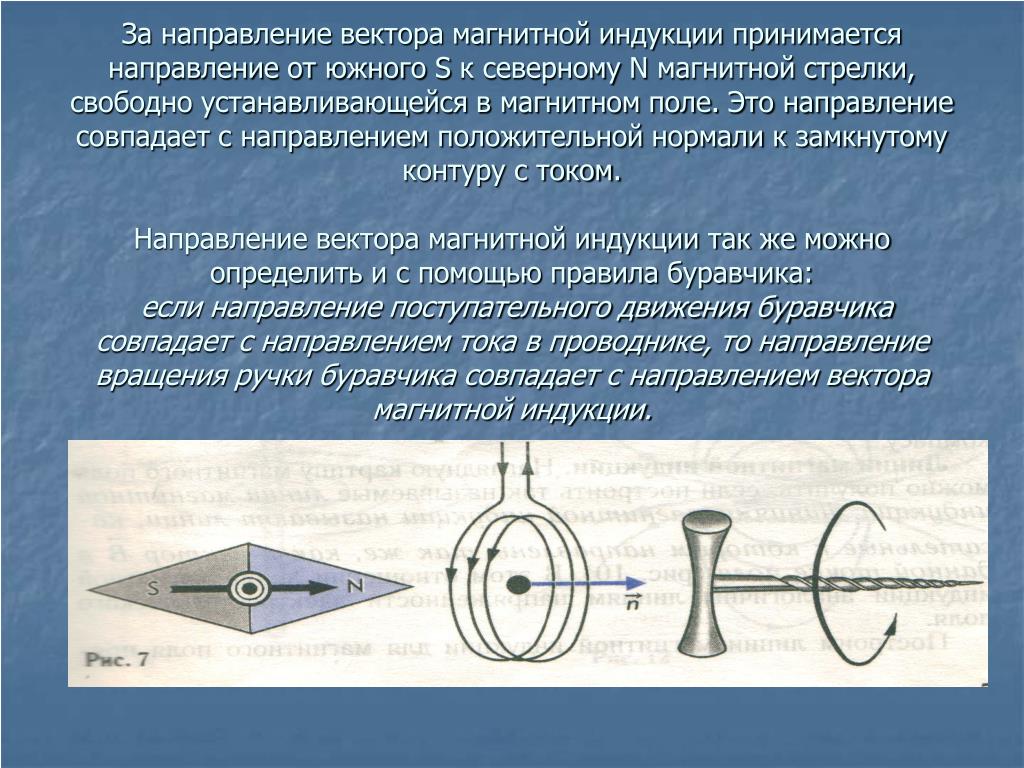
Прямая на плоскости, всевозможные уравнения.
Литература: Сборник задач по математике. Часть 1. Под ред А. В. Ефимова, Б. П. Демидовича.
Существуют такие формы записи уравнения прямой:
1) $y=kx+b,$ где $k -$ угловой коэффициент, $b-$ отрезок, который прямая отсекает на оси $OY.$
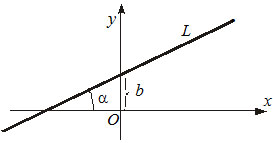
2) $y-y_0=k(x-x_0) $ — уравнение прямой, которая проходит через заданную точку $P(x_0, y_0)$ под заданным углом $alpha$ к оси $OX$ $(k=tgalpha).$
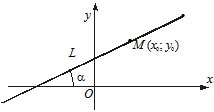
3) $frac{x-x_1}{x_2-x_1}=frac{y-y_1}{y_2-y_1} $ — уравнение прямой, которая проходит через две точки $M(x_1, y_1)$ и $N(x_2, y_2).$
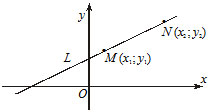
4) $frac{x}{a}+frac{y}{b}=1 $ — уравнение прямой в отрезках на осях, где $a$ и $b -$ величины отрезков, которые прямая отсекает на осях координат.
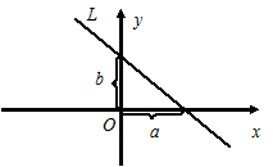
5) $frac{x-x_0}{l}=frac{y-y_0}{m} $ — каноническое уравнение прямой, где $overline{S}=(l, m) -$ направляющий вектор прямой, то есть вектор параллельный прямой $(overline{S}parallel L),$ точка $P(x_0, y_0)in L.$
{jumi[*4]}
6) $A(x-x_0)+B(y-y_0)=0$ — уравнение прямой $L,$ которая проходит через точку $M(x_0, y_0)$ перпендикулярно вектору $overline{N}=(A, B).$ Вектор $overline N$ называется нормальным вектором прямой.
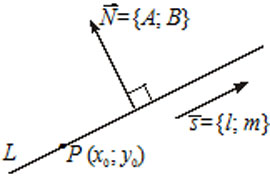
7) $Ax+By+C=0 -$ общее уравнение прямой $L,$ где $overline{N}=(A, B) -$ нормальный вектор прямой $L.$
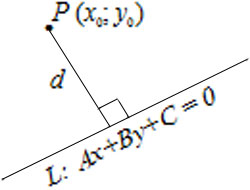
 $xcosalpha+ycosbeta-p=0 -$ нормальное уравнение прямой, где $cosalpha$ и $cosbeta -$ направляющие косинусы нормального вектора $n,$ направленного из начала координат в сторону прямой, а $p>0 -$ расстояние от начала координат до прямой.
$xcosalpha+ycosbeta-p=0 -$ нормальное уравнение прямой, где $cosalpha$ и $cosbeta -$ направляющие косинусы нормального вектора $n,$ направленного из начала координат в сторону прямой, а $p>0 -$ расстояние от начала координат до прямой.
Общее уравнение прямой приводится к нормальному, путем умножения на нормирующий множитель $mu=-frac{sgn C}{sqrt{A^2+B^2}}.$
Расстояние от точки $P(x_0, y_0)$ до прямой $L: Ax+By+C=0$ вычисляется по формуле $$d=left|frac{Ax_0+By_0+C}{sqrt{A^2+B^2}}right|.$$
Расположение двух прямых на плоскости.
Условия параллельности двух прямых:
1) Пусть $L_1: k_1x+b_1,$ $k_1=tgalpha_1;$
$L_2: k_2x+b_2,$ $k_2=tgalpha_2.$
Прямые $L_1$ и $L_2$ параллельны тогда и только тогда, когда $k_1=k_2.$
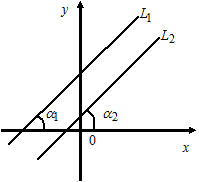
2) Пусть $L_1:$ $frac{x-x_1}{l_1}=frac{y-y_1}{m_1},$ $overline{S}_1=(l_1, m_1);$
$L_2:$ $frac{x-x_2}{l_2}=frac{y-y_2}{m_2},$ $overline{S}_2=(l_2, m_2).$
Прямые $L_1$ и $L_2$ параллельны тогда и только тогда, когда $overline{S}_1paralleloverline{S}_2Leftrightarrow$ $frac{l_1}{l_2}=frac{m_1}{m_2}.$
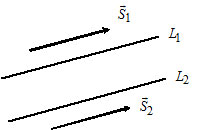
3) Пусть $L_1: A_1x+B_1y+C_1=0,$ $overline{N}_1=(A_1, B_1);$
$L_2: A_2x+B_2y+C_2=0,$ $overline{N}_2=(A_2, B_2).$
Прямые $L_1$ и $L_2$ параллельны тогда и только тогда, когда $overline{N}_1paralleloverline{N}_2Leftrightarrow$ $frac{A_1}{A_2}=frac{B_1}{B_2}.$
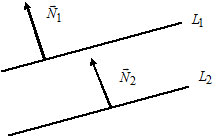
Условия перпендикулярности двух прямых:
1) Пусть $L_1: k_1x+b_1,$ $k_1=tgalpha_1;$
$L_2: k_2x+b_2,$ $k_2=tgalpha_2.$
$L_1perp L_2Leftrightarrow$ $k_1cdot k_2=-1.$
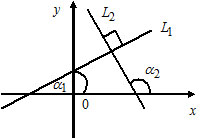
2) Пусть $L_1:$ $frac{x-x_1}{l_1}=frac{y-y_1}{m_1},$ $overline{S}_1=(l_1, m_1);$
$L_2:$ $frac{x-x_2}{l_2}=frac{y-y_2}{m_2},$ $overline{S}_2=(l_2, m_2).$
$L_1perp L_2Leftrightarrow$ $overline{S}_1perpoverline{S}_2Leftrightarrow$ ${l_1}cdot{l_2}+{m_1}cdot{m_2}=0.$
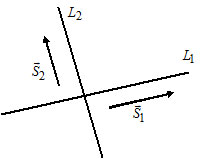
3) Пусть $L_1: A_1x+B_1y+C_1=0,$ $overline{N}_1=(A_1, B_1);$
$L_2: A_2x+B_2y+C_2=0,$ $overline{N}_2=(A_2, B_2).$
$L_1perp L_2Leftrightarrow$ $overline{N}_1perpoverline{N}_2Leftrightarrow$ ${A_1}cdot{A_2}+{B_1}cdot{B_2}=0.$
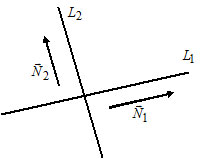
Угол между прямыми:
1) Пусть $L_1: k_1x+b_1,$ $k_1=tgalpha_1;$
$L_2: k_2x+b_2,$ $k_2=tgalpha_2.$
$tgwidehat{(L_1, L_2)}=$ $frac{k_1-k_2}{1+k_1cdot k_2}.$
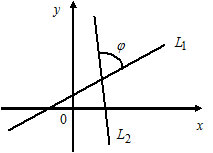
2) Пусть $L_1:$ $frac{x-x_1}{l_1}=frac{y-y_1}{m_1},$ $overline{S}_1=(l_1, m_1);$
$L_2:$ $frac{x-x_2}{l_2}=frac{y-y_2}{m_2},$ $overline{S}_2=(l_2, m_2).$
$coswidehat{(L_1, L_2)}=$ $frac{{l_1}cdot{l_2}+{m_1}cdot{m_2}}{sqrt{l_1^2+m_1^2}cdotsqrt{l_2^2+m_2^2}}.$

3) Пусть $L_1: A_1x+B_1y+C_1=0,$ $overline{N}_1=(A_1, B_1);$
$L_2: A_2x+B_2y+C_2=0,$ $overline{N}_2=(A_2, B_2).$
$coswidehat{(L_1, L_2)}=$ $frac{{A_1}cdot{A_2}+{B_1}cdot{B_2}}{sqrt{A_1^2+B_1^2}cdotsqrt{A_2^2+B_2^2}}.$
Примеры:
2.141.
а) Прямая $L$ задана точкой $M_0(-1; 2)in L$ и нормальным вектором $overline N(2; 2).$ Требуется: 1) написать уравнение прямой, привести его к общему виду и построить прямую; 2) привести общее уравнение к нормальному виду и указать расстояние от начала координат до прямой.
Решение.
Подставим в формулу 6) для уравнения прямых ($A(x-x_0)+B(y-y_0)=0$) соответственно координаты точки $(x_0; y_0)=M_0(-1; 2)$ и вектора $(A; B)=overline N(2; 2):$
$2(x+1)+2(y-2)=0.$ Далее, приведем это уравнение к общему виду:
$2x+2+2y-4=0Rightarrow$
$2x+2y-2=0Rightarrow$
$x+y-1=0.$
Нормальное уравнение прямой имеет вид $xcosalpha+ycosbeta-p=0,$ где $cosalpha$ и $cosbeta -$ направляющие косинусы нормального вектора $n,$ направленного из начала координат в сторону прямой, а $p>0 -$ расстояние от начала координат до прямой.
Общее уравнение прямой приводится к нормальному, путем умножения на нормирующий множитель $mu=-frac{sgn C}{sqrt{A^2+B^2}}.$
Для нашей прямой имеем $A=1; B=1; C=-1 Rightarrow sgn C=-1.$ Таким образом, $mu=-frac{-1}{sqrt{1+1}}=frac{1}{sqrt 2}.$
Запишем нормальное уравнение прямой:
$x+y-1=0 |cdotfrac{1}{sqrt 2}Rightarrow$
$frac{1}{sqrt 2}x+frac{1}{sqrt 2}y-frac{1}{sqrt 2}=0.$
Расстояние от начала координат $p=frac{1}{sqrt 2}.$
Ответ: $2(x+1)+2(y-2)=0;$ общее уравнение $x+y-1=0;$ нормальное уравнение прямой $frac{1}{sqrt 2}x+frac{1}{sqrt 2}y-frac{1}{sqrt 2}=0;$ $p=frac{1}{sqrt 2}.$
2.142.
а) Прямая $L$ задана точкой $M_0(-1; 2)in L$ и направляющим вектором $overline S(3; -1).$ Требуется: 1) написать уравнение прямой, привести его к общему виду и построить прямую; 2) привести общее уравнение к нормальному виду и указать расстояние от начала координат до прямой.
Решение.
Подставим в формулу 5) для уравнения прямых ($frac{x-x_0}{l}=frac{y-y_0}{m}$) соответственно координаты точки $(x_0; y_0)=M_0(-1; 2)$ и вектора $(l; m)=overline S(3; -1):$ $frac{x+1}{3}=frac{y-2}{-1}$
Далее, приведем это уравнение к общему виду:
$-1(x+1)=3(y-2)Rightarrow$
$-x-1-3y+6=0Rightarrow$
$x+3y-5=0.$
Общее уравнение прямой приводится к нормальному, путем умножения на нормирующий множитель $mu=-frac{sgn C}{sqrt{A^2+B^2}}.$
Для нашей прямой имеем $A=1; B=3; C=-5 Rightarrow sgn C=-1.$ Таким образом, $mu=-frac{-1}{sqrt{1+9}}=frac{1}{sqrt{10}}.$
Запишем нормальное уравнение прямой:
$x+y-1=0 |cdotfrac{1}{sqrt {10}}Rightarrow$
$frac{1}{sqrt {10}}x+frac{3}{sqrt {10}}y-frac{5}{sqrt {10}}=0.$
Расстояние от начала координат $p=frac{5}{sqrt {10}}.$
Ответ: $frac{x+1}{3}=frac{y-2}{-1};$ общее уравнение $x+3y-5=0;$ нормальное уравнение прямой $frac{1}{sqrt {10}}x+frac{3}{sqrt {10}}y-frac{5}{sqrt {10}}=0;$ $p=frac{5}{sqrt {10}}.$
2.143.
а) Прямая $L$ задана двумя своими точками $M_1(1; 2)in L$ и $M_2(-1; 0)in L.$ Требуется: 1) написать уравнение прямой, привести его к общему виду и построить прямую; 2) привести общее уравнение к нормальному виду и указать расстояние от начала координат до прямой.
Решение.
Подставим в формулу 3) для уравнения прямых ($frac{x-x_1}{x_2-x_1}=frac{y-y_1}{y_2-y_1}$) соответственно координаты точек $M_1(1; 2)=(x_1; y_1)$ и $M_2(-1; 0)=(x_2; y_2):$ $frac{x-1}{-1-1}=frac{y-2}{0-2}Rightarrow frac{x-1}{-2}=frac{y-2}{-2}.$
Далее, приведем это уравнение к общему виду:
$-2(x-1)=-2(y-2)Rightarrow$
$x-1=y-2Rightarrow$
$x-y+1=0.$
Общее уравнение прямой приводится к нормальному, путем умножения на нормирующий множитель $mu=-frac{sgn C}{sqrt{A^2+B^2}}.$
Для нашей прямой имеем $A=1; B=-1; C=1 Rightarrow sgn C=1.$ Таким образом, $mu=-frac{1}{sqrt{1+1}}=-frac{1}{sqrt{2}}.$
Запишем нормальное уравнение прямой:
$x-y+1=0 |cdot-frac{1}{sqrt {2}}Rightarrow$
$-frac{1}{sqrt {2}}x+frac{1}{sqrt {2}}y-frac{1}{sqrt {2}}=0.$
Расстояние от начала координат $p=frac{1}{sqrt {2}}.$
Ответ: $frac{x-1}{-2}=frac{y-2}{-2};$ общее уравнение $x-y+1=0;$ нормальное уравнение прямой $-frac{1}{sqrt {2}}x+frac{1}{sqrt {2}}y-frac{1}{sqrt {2}}=0;$ $p=frac{1}{sqrt {2}}.$
2.150. Треугольник $ABC$ задан координатами своих вершин $A(1; 2), B(2; -2), C(6; 1).$ Требуется:
1) Найти уравнение стороны $AB;$
2) найти уравнение высоты $CD$ и вычислить ее длину $h=|CD|;$
3) найти угол между высотой $CD$ и медианой $BM.$
Решение.
Сделаем рисунок:
1) Уравнение прямой $AB$ найдем по формуле уравнения прямой, проходящей через две точки $frac{x-x_1}{x_2-x_1}=frac{y-y_1}{y_2-y_1}. $
В нашем случае $(x_1; y_1)=A(1; 2);$ $(x_2; y_2)=B(2; -2).$
Подставляем координаты точек в уравнение прямой. Получаем $$frac{x-1}{2-1}=frac{y-2}{-2-2}Rightarrow x-1=frac{y-2}{-4}.$$ Запишем общее уравнение прямой $AB$:
$-4(x-1)=y-2Rightarrow$ $-4x+4=y-2Rightarrow$ $4x+y-6=0.$
2) Уравнение прямой $CD$ найдем, пользуясь уравнением (6): $A(x-x_0)+B(y-y_0)=0$ — уравнение прямой $L,$ которая проходит через точку $M(x_0, y_0)$ перпендикулярно вектору $overline{N}=(A, B).$
В нашем случае, высота $CD$ это прямая, которая проходит через точку $C$ перпендикулярно вектору $AB.$
Таким образом, $$(x_0; y_0)=C=(6; 1);quadoverline{N}=overline{AB}=(2-1; -2-2)=(1; -4).$$
Подставляем эти координаты в уравнение прямой:
$1(x-6)-4(y-1)=0Rightarrow x-6-4y+4=0 Rightarrow x-4y-2=0.$
То есть, уравнение прямой $CD:$ $x-4y-2=0.$
Чтобы найти длину высоты $h=|CD|,$ найдем координаты точки $D,$ как точки пересечения прямых $CD$ и $AB:$
$left{begin{array}{lcl}x-4y-2=0\4x+y-6=0.end{array}right. $
Решим систему методом исключений:
$left{begin{array}{lcl}x-4y-2=0\4x+y-6=0.end{array}right. Rightarrow$ $left{begin{array}{lcl}x=4y+2\4x+y-6=0.end{array}right. Rightarrow$
$left{begin{array}{lcl}x=4y+2\4(4y+2)+y-6=0.end{array}right. Rightarrow$ $left{begin{array}{lcl}x=4y+2\16y+8+y-6=0.end{array}right. Rightarrow$
$left{begin{array}{lcl}x=-8/17+2=26/17\y=-2/17.end{array}right. .$
Следовательно имеем $D(26/17; -2/17).$ Теперь можем найти длину высоты $CD:$
$h=|CD|=sqrt{(x_d-x_c)^2+(y_d-y_c)^2}=sqrt{(26/17-6)^2+(-2/17-1)^2}=$ $sqrt{left(frac{26-102}{17}right)^2+left(frac{-2-17}{17}right)^2}=sqrt{frac{76^2+19^2}{17^2}}=sqrt{frac{6137}{17^2}}=frac{19}{17}sqrt{17}=frac{19}{sqrt{17}}.$
3) Уравнение высоты $CD$ мы уже нашли в пункте 2). Найдем уравнение медианы $BM.$ Будем его искать, используя форумулу уравнения прямой, проходящей через две точки.
Координаты точки $B=(2, -2); $ координаты точки $M$ найдем как середину стороны $AC:$ $x_M=frac{x_A+x_C}{2}; y_M=frac{y_A+y_C}{2}.$
$x_M=frac{1+6}{2}=3.5;$ $y_M=frac{2+1}{2}=1.5.$
Подставляем координаты точек $B(2; -2)$ и $M(3.5; 1.5)$ в уравнение прямой
$frac{x-x_1}{x_2-x_1}=frac{y-y_1}{y_2-y_1}:$
$frac{x-2}{3.5-2}=frac{y-(-2)}{1.5-(-2)}Rightarrow frac{x-2}{1.5}=frac{y+2}{3.5}Rightarrow$
$3.5(x-2)=1.5(y+2)Rightarrow 3.5x-7=1.5y+3 Rightarrow 3.5x-1.5y-10=0.$
Далее, зная общие уравнения двух прямых $CD: x-4y-2=0$ и $BM: 3.5x-1.5y-10=0$ можно найти угол между ними по формуле
$coswidehat{(L_1, L_2)}=$ $frac{{A_1}cdot{A_2}+{B_1}cdot{B_2}}{sqrt{A_1^2+B_1^2}cdotsqrt{A_2^2+B_2^2}},$
где $L_1: A_1x+B_1y+C_1=0,$ $overline{N}_1=(A_1, B_1);$
$L_2: A_2x+B_2y+C_2=0,$ $overline{N}_2=(A_2, B_2).$
Для наших прямых имеем: $(A_1, B_1)=(1; -4);$ $(A_2; B_2)=(3.5; -1.5).$
Отсюда
$coswidehat{(CD, BM)}=$ $frac{{1}cdot{3.5}+{(-4)}cdot{(-1.5)}}{sqrt{1^2+(-4)^2}cdotsqrt{3.5^2+(-1.5)^2}}=frac{9.5}{sqrt{17}cdotsqrt{14.5}}=frac{19}{sqrt{986}}.$
Ответ: 1) $AB: 4x+y-6=0.$
2) $CD:$ $x-4y-2=0; $ $h=|CD|=frac{19}{sqrt{17}};$
3) $coswidehat{(CD, BM)}=$ $frac{19}{sqrt{986}}.$
2.160. В равнобедренном треугольнике $ABC$ заданы вершина $C(4; 3),$ уравнение $2x-y-5=0$ основания $AC$ и уравнение $x-y=0$ боковой стороны $AB.$ Найти уравнение стороны $BC.$
Решение.
Найдем координаты вершины треугольника $A,$ как точки пересечения прямых $AB$ и $AC:$
$$left{begin{array}{lcl}x-y=0\2x-y-5=0end{array}right.Rightarrowleft{begin{array}{lcl}x=y\2y-y-5=0end{array}right.Rightarrowleft{begin{array}{lcl}x=y\y=5end{array}right.Rightarrowleft{begin{array}{lcl}x=5\y=5end{array}right. $$
Таким образом, мы имеем координаты вершин при основании равнобедренного треугольника $A(5; 5)$ и $C(4; 3).$ Найдем координаты вершины $B(x, y).$ Мы знаем, что эта точка принадлежит прямой $AB: x-y=0$ и что $AB=BC.$ Запишем формулы для длин сторон $AB$ и $BC:$
$|AB|=sqrt{(x-5)^2+(y-5)^2};$
$|BC|=sqrt{(x-4)^2+(y-3)^2}.$
Далее, чтобы найти координаты точки $B,$ решим систему уравнений:
$$left{begin{array}{lcl}x-y=0\sqrt{(x-5)^2+(y-5)^2}=sqrt{(x-4)^2+(y-3)^2}end{array}right.Rightarrow$$ $$left{begin{array}{lcl}x-y=0\x^2-10x+25+y^2-10y+25=x^2-8x+16+y^2-6y+9end{array}right.Rightarrow $$
$$left{begin{array}{lcl}x-y=0\-2x-4y+25=0end{array}right.Rightarrowleft{begin{array}{lcl}x=y\-2y-4y+25=0end{array}right.Rightarrow $$
$$Rightarrowleft{begin{array}{lcl}x=y\y=frac{25}{6}.end{array}right.$$ Мы нашли координаты точки $Bleft(frac{25}{6}, frac{25}{6}right).$
Зная координаты точек $B$ и $C$ можно записать уравнение прямой $BC,$ как прямой проходящей через две точки $left(frac{x-x_1}{x_2-x_1}=frac{y-y_1}{y_2-y_1} right):$
$$frac{x-4}{frac{25}{6}-4}=frac{y-3}{frac{25}{6}-3}Rightarrow frac{x-4}{frac{25-24}{6}}=frac{y-3}{frac{25-18}{6}}Rightarrow $$
$$Rightarrowfrac{x-4}{1}=frac{y-3}{7}Rightarrow 7x-28=y-3Rightarrow 7x-y-25=0.$$
Ответ: $7x-y-25=0.$
2.165. Даны две противоположные вершины квадрата $A(1; 3)$ и $C(-1; 1).$ Найти координаты двух его других вершин и написать уравнения его сторон.
Решение:
Найдем уравнение диагонали $AC:$
$frac{x-1}{-1-1}=frac{y-3}{1-3} Rightarrow frac{x-1}{-2}=frac{y-3}{-2}Rightarrow x-y+2=0.$
Найдем ее середину: $$x_O=frac{x_A+x_C}{2}; y_O=frac{y_A+y_C}{2}.$$
$$x_O=frac{1-1}{2}=0;,,, y_O=frac{3+1}{2}=2,, Rightarrow,, O=(0; 2).$$
Далее, найдем уравнение второй диагонали квадрата — прямой, проходящей через точку $O$ перпендикулярно прямой $AC.$ Для прямой $AC$ нормальный вектор имеет координаты $overline{N}=(1; -1).$ Прямая, перпендикулярная прямой $AC$ является параллельной нормальному вектору $overline{N}$. Таким образом, уравнение прямой $BD$ запишем по формуле 5) $left(frac{x-x_0}{l}=frac{y-y_0}{m}right),$ где $(x_0, y_0)=O(0; 2),$ $(l, m)=overline{N}=(1, -1):$
$$frac{x}{1}=frac{y-2}{-1}Rightarrow x=-y+2 Rightarrow x+y-2=0.$$
Ясно, что $AO=CO=BO=DO.$ Найдем длину отрезка $AO:$ $AO=sqrt{(0-1)^2+(2-3)^2}=sqrt{2}.$
Далее, будем искать координаты точек $B$ и $D,$ принадлежащих прямой $BD$ и таких, что $BO=DO=AO.$
$$left{begin{array}{lcl}x+y-2=0\sqrt{(0-x)^2+(2-y)^2}=sqrt{2}end{array}right.Rightarrow$$
$$left{begin{array}{lcl}x=2-y\sqrt{(y-2)^2+(2-y)^2}=sqrt{2}end{array}right.Rightarrow$$
$$left{begin{array}{lcl}x=2-y\|2-y|sqrt{2}=sqrt{2}end{array}right.Rightarrowleft{begin{array}{lcl}x=2-y\|2-y|=1end{array}right.Rightarrowleft{begin{array}{lcl}x=2-y\left[begin{array}{lcl}2-y_1=1\2-y_2=-1end{array}right.end{array}right.Rightarrow$$
$Rightarrowleft{begin{array}{lcl}x=2-y\left[begin{array}{lcl}y_1=1\y_2=3end{array}right.end{array}right.Rightarrow$ $left{begin{array}{lcl}left[begin{array}{lcl}x_1=1\x_2=-1end{array}right.\left[begin{array}{lcl}y_1=1\y_2=3end{array}right.end{array}right.$
Таким образом, мы нашли координаты вершин $B(1; 1)$ и $D(-1; 3).$ Зная координаты вершин квадрата, запишем уравнения его сторон, пользуясь формулой (3) — $frac{x-x_1}{x_2-x_1}=frac{y-y_1}{y_2-y_1} $ — уравнение прямой, которая проходит через две точки $M(x_1, y_1)$ и $N(x_2, y_2).$
$A(1; 3),$ $B(1; 1),$ $C(-1; 1),$ $D(-1; 3).$
$AB:$ $frac{x-1}{1-1}=frac{y-3}{1-3}Rightarrowfrac{x-1}{0}=frac{y-3}{-2}Rightarrow $ $-2(x-1)=0Rightarrow x=1.$
$BC:$ $frac{x-1}{-1-1}=frac{y-1}{1-1}Rightarrowfrac{x-1}{-1}=frac{y-1}{0}Rightarrow $ $0(x-1)=-1(y-1)Rightarrow y=1.$
$CD:$ $frac{x+1}{-1+1}=frac{y-1}{3-1}Rightarrowfrac{x+1}{0}=frac{y-1}{2}Rightarrow $ $2(x+1)=0(y-1)Rightarrow x=-1.$
$DA:$ $frac{x-1}{-1-1}=frac{y-3}{3-3}Rightarrowfrac{x-1}{-2}=frac{y-3}{0}Rightarrow $ $0(x-1)=-2(y-3)Rightarrow y=3.$
Ответ: $A(1; 3),$ $B(1; 1),$ $C(-1; 1),$ $D(-1; 3);$ $AB:$ $x=1;$ $BC:$ $y=1;$ $CD:$ $x=-1;$ $DA:$ $y=3.$
Деление отрезка в заданном отношении (векторный и координатный способы).
Литература: Сборник задач по математике. Часть 1. Под ред А. В. Ефимова, Б. П. Демидовича.
Зная координаты точек $M_1(x_1, y_1, z_1)$ и $M_2(x_2, y_2, z_2)$ и отношение $lambda,$ в котором точка $M$ делит направленный отрезок $overline{M_1M_2},$ найдем координаты точки $M.$
Пусть $O -$ начало координат. Обозначим $overline{OM_1}=r_1,$ $overline{OM_2}=r_2,$ $overline{OM}=r.$ Так как, $$overline{M_1M}=r-r_1, overline{MM_2}=r_2-r,$$ то $r-r_1=lambda(r_2-r),$ откуда (так как $lambdaneq -1$) $$r=frac{r_1+lambda r_2}{1+lambda}.$$ Полученная форма и дает решение задачи в векторной форме. Переходя в этой формуле к координатам, получим $$x=frac{x_1+lambda x_2}{1+lambda}, y=frac{y_1+lambda y_2}{1+lambda}, z=frac{z_1+lambda z_2}{1+lambda}.$$
Примеры.
2.57. Отрезок с концами в точках $A(3, -2)$ и $B(6, 4)$ разделен на три равные части. Найти координаты точек деления.
Решение.
Пусть $C(x_C, y_C)$ и $D(x_D, y_D) -$ точки, которые делят отрезок $AB$ на три равные части. Тогда $$lambda_1=frac{AC}{CB}=frac{1}{2};$$ $$x_C=frac{x_A+lambda_1x_B}{1+lambda_1}=frac{3+frac{1}{2}cdot 6}{1+frac{1}{2}}=4;$$
$$y_C=frac{y_A+lambda_1y_B}{1+lambda_1}=frac{-2+frac{1}{2}cdot 4}{1+frac{1}{2}}=0.$$
Далее находим координаты точки $D:$
$$lambda_2=frac{AD}{DB}=frac{2}{1}=2;$$ $$x_D=frac{x_A+lambda_2x_B}{1+lambda_2}=frac{3+2cdot 6}{1+2}=5;$$
$$y_D=frac{y_A+lambda_2y_B}{1+lambda_2}=frac{-2+2cdot 4}{1+2}=2.$$
Ответ: $(4, 0)$ и $(5, 2).$
2.58.Определить координаты концов отрезка, который точками $C(2, 0, 2)$ и $D(5, -2, 0)$ разделен на три равные части.
Решение.
Пусть $A(x_A, y_A, z_A)$ и $B(x_B, y_B, z_B) -$ концы заданного отрезка.
Выпишем формулы для нахождения координат точки $C$ и подставим известные координаты:
$$lambda_1=frac{AC}{CB}=frac{1}{2};$$ $$x_C=frac{x_A+lambda_1x_B}{1+lambda_1}Rightarrow 2=frac{x_A+frac{1}{2}cdot x_B}{1+frac{1}{2}}=2frac{x_A+frac{1}{2}cdot x_B}{3}Rightarrow $$ $$Rightarrow 3=x_A+frac{1}{2}cdot x_B;$$
$$y_C=frac{y_A+lambda_1y_B}{1+lambda_1}Rightarrow 0=frac{y_A+frac{1}{2}cdot y_B}{1+frac{1}{2}}Rightarrow 0=y_A+frac{1}{2}cdot y_B;$$
$$z_C=frac{z_A+lambda_1z_B}{1+lambda_1}Rightarrow 2=frac{z_A+frac{1}{2}cdot z_B}{1+frac{1}{2}}=2frac{z_A+frac{1}{2}cdot z_B}{3}Rightarrow$$ $$Rightarrow 3=z_A+frac{1}{2}cdot z_B.$$
Аналогичные равенства запишем для точки $D:$
$$lambda_2=frac{AD}{DB}=frac{2}{1}=2;$$ $$x_D=frac{x_A+lambda_2x_B}{1+lambda_2}Rightarrow 5=frac{x_A+2cdot x_B}{1+2}=frac{x_A+2cdot x_B}{3}Rightarrow $$ $$Rightarrow 15=x_A+2cdot x_B;$$
$$y_D=frac{y_A+lambda_2y_B}{1+lambda_2}Rightarrow -2=frac{y_A+2cdot y_B}{1+2}Rightarrow -6=y_A+2cdot y_B;$$
$$z_D=frac{z_A+lambda_2z_B}{1+lambda_2}Rightarrow 0=frac{z_A+2cdot z_B}{1+2}Rightarrow 0=z_A+2cdot z_B.$$
Далее запишем полученные уравнения относительно $x_A, x_B;$ $y_A, y_B$ и $z_A, z_B$ попарно в виде систем и решим их:
$$left{begin{array}{lcl}x_A+frac{1}{2}x_B=3\x_A+2x_B=15end{array}right.Rightarrowleft{begin{array}{lcl}x_A=3-0,5x_B\3-0,5x_B+2x_B=15end{array}right.Rightarrow$$ $$Rightarrowleft{begin{array}{lcl}x_A=3-0,5cdot8=-1\x_B=frac{12}{1,5}=8end{array}right.$$
$$left{begin{array}{lcl}y_A+frac{1}{2}y_B=0\y_A+2y_B=-6end{array}right.Rightarrowleft{begin{array}{lcl}y_B=-2y_A\y_A-4y_A=-6end{array}right.Rightarrow$$ $$Rightarrowleft{begin{array}{lcl}y_B=-4\y_A=2end{array}right.$$
$$left{begin{array}{lcl}z_A+frac{1}{2}z_B=3\z_A+2z_B=0end{array}right.Rightarrowleft{begin{array}{lcl}-2z_B+0,5z_B=3\z_A=-2z_Bend{array}right.Rightarrow$$ $$Rightarrowleft{begin{array}{lcl}z_B=-2\z_A=4end{array}right.$$
Таким образом, получили координаты концов отрезка $A(-1, 2, 4)$ и $B(8, -4, -2).$
Ответ: $A(-1, 2, 4),$ $B(8, -4, -2).$
Взаимное расположение плоскостей, угол между плоскостями.
Литература: Сборник задач по математике. Часть 1. Под ред А. В. Ефимова, Б. П. Демидовича.
Условие параллельности двух плоскостей:
Пусть $P_1: A_1x+B_1y+C_1z+D_1=0,$ $overline{N}_1=(A_1, B_1, C_1);$
$P_2: A_2x+B_2y+C_2z+D_2=0,$ $overline{N}_2=(A_2, B_2, C_2).$
Плоскости $P_1$ и $P_2$ параллельны тогда и только тогда, когда $overline{N}_1paralleloverline{N}_2Leftrightarrow$ $frac{A_1}{A_2}=frac{B_1}{B_2}=frac{C_1}{C_2}.$
Условия перпендикулярности двух плоскостей:
Пусть $P_1: A_1x+B_1y+C_1z+D_1=0,$ $overline{N}_1=(A_1, B_1, C_1);$
$P_2: A_2x+B_2y+C_2z+D_2=0,$ $overline{N}_2=(A_2, B_2, C_2).$
$P_1perp P_2Leftrightarrow$ $overline{N}_1perpoverline{N}_2Leftrightarrow$ ${A_1}cdot{A_2}+{B_1}cdot{B_2}+C_1cdot C_2=0.$

Угол между плоскостями:
Пусть $P_1: A_1x+B_1y+C_1z+D_1=0,$ $overline{N}_1=(A_1, B_1, C_1);$
$P_2: A_2x+B_2y+C_2z+D_2=0,$ $overline{N}_2=(A_2, B_2, C_2).$
$coswidehat{(P_1, P_2)}=$ $frac{overline N_1cdot overline N_2}{|overline N_1||overline N_2|}=$ $frac{{A_1}cdot{A_2}+{B_1}cdot{B_2}+C_1cdot C_2}{sqrt{A_1^2+B_1^2+C_1^2}cdotsqrt{A_2^2+B_2^2+C_2^2}}.$
Примеры.
В задачах исследовать взаимное расположение заданных плоскостей. При этом, в случае $P_1parallel P_2$ то найти расстояние между плоскостями, а в случае — косинус угла между ними.
2.185. $P_1: -x+2y-z+1=0;$ $P_2: y+3z-1=0.$
Решение.
Вычислим угол между заданными плоскостями.
$P_1: -x+2y-z+1=0, Rightarrowoverline{N}_1=(-1, 2, -1);$
$P_2: y+3z-1=0, Rightarrowoverline{N}_2=(0, 1, 3).$
Отсюда
$coswidehat{(P_1, P_2)}=$ $frac{overline N_1cdot overline N_2}{|overline N_1||overline N_2|}=$ $frac{-1cdot 0+2cdot1-1cdot 3}{sqrt{(-1)^2+2^2+(-1)^2}cdotsqrt{0^2+1^2+3^2}}=frac{-1}{sqrt{60}}=frac{-1}{2sqrt{15}}.$
Соответственно, плоскости пересекаются и косинус кратчайшего угла между плоскостями
$coswidehat{(P_1, P_2)}=frac{1}{2sqrt{15}}.$
Ответ: Плоскости пересекаются. $coswidehat{(P_1, P_2)}=frac{1}{2sqrt{15}}.$
2.187. $P_1: x-y+1=0;$ $P_2: y-z+1=0.$
Решение.
Вычислим угол между заданными плоскостями.
$P_1: x-y+1=0, Rightarrowoverline{N}_1=(1, -1, 0);$
$P_2: y-z+1=0, Rightarrowoverline{N}_2=(0, 1, -1).$
Отсюда
$coswidehat{(P_1, P_2)}=$ $frac{overline N_1cdot overline N_2}{|overline N_1||overline N_2|}=$ $frac{1cdot 0+(-1)cdot1+0cdot (-1)}{sqrt{(1)^2+(-1)^2+0^2}cdotsqrt{0^2+1^2+(-1)^2}}=frac{-1}{sqrt{4}}=frac{-1}{2}.$
Соответственно, плоскости пересекаются и косинус кратчайшего угла между плоскостями
$coswidehat{(P_1, P_2)}=frac{1}{2}.$
Ответ: Плоскости пересекаются. $coswidehat{(P_1, P_2)}=frac{1}{2}.$
2.196. Составить уравнение плоскости $P,$ проходящей через точку $A(1, 1, -1)$ и перпендикулярной к плоскостям $P_1: 2x-y+5z+3=0$ и $P_2: x+3y-z-7=0.$
Решение.
Для того, чтобы плоскость $P$ была перпендикулярно плоскостям $P_1$ и $P_2,$ достаточно, чтобы она была параллельна их нормалям $N_1$ и $N_2.$ Или, что тоже самое, перпендикулярна векторному произведению $[N_1, N_2]$
$P_1: 2x-y+5z+3=0, Rightarrowoverline{N}_1=(2, -1, 5);$
$P_2: x+3y-z-7=0, Rightarrowoverline{N}_2=(1, 3, -1).$
$[N_1, N_2]=begin{vmatrix}i&j&k\2&-1&5\1&3&-1end{vmatrix}=i(1-15)-j(-2-5)+k(6+1)=$ $=-14i+7j+7k.$
Теперь выпишем уравнение плоскости, проходящей через заданную точку $A(1, 1, -1)$ и перпендикулярной вектору $[N_1, N_2]=(-14, 7, 7):$
$-14(x-1)+7(y-1)+7(z+1)=0 |:7$
$-2(x-1)+y-1+z+1=0$
$-2x+y+z+2=0.$
Ответ: $-2x+y+z+2=0.$
Домашнее задание.
В задачах исследовать взаимное расположение заданных плоскостей. При этом, в случае $P_1parallel P_2$ то найти расстояние между плоскостями, а в случае — косинус угла между ними.
2.186. $P_1: 2x-y+z-1=0;$ $P_2: -4x+2y-2z-1=0.$
2.188. $P_1: 2x-y-z+1=0;$ $P_2: -4x+2y+2z-2=0.$
Плоскость в пространстве, всевозможные уравнения, расстояние от точки до плоскости.
Литература: Сборник задач по математике. Часть 1. Под ред А. В. Ефимова, Б. П. Демидовича.
Существуют такие формы записи уравнения плоскости:
1) $Ax+By+Cz+D=0 -$ общее уравнение плоскости $P,$ где $overline{N}=(A, B, C) -$ нормальный вектор плоскости $P.$
2) $A(x-x_0)+B(y-y_0)+C(z-z_0)=0 -$ уравнение плоскости $P,$ которая проходит через точку $M(x_0, y_0, z_0)$ перпендикулярно вектору $overline{N}=(A, B, C).$ Вектор $overline N$ называется нормальным вектором плоскости.
3) $frac{x}{a}+frac{y}{b}+frac{z}{c}=1 -$ уравнение плоскости в отрезках на осях, где $a,$ $b$ и $c -$ величины отрезков, которые плоскость отсекает на осях координат.
4) $begin{vmatrix}x-x_1&y-y_1&z-z_1\x_2-x_1&y_2-y_1&z_2-z_1\x_3-x_1&x_2-x_1&x_3-x_1end{vmatrix}=0 — $ уравнение плоскости, которая проходит через три точки $A(x_1, y_1, z_1), B(x_2, y_2, z_2)$ и $C(x_3, y_3, z_3).$
5) $xcosalpha+ycosbeta+zcosgamma-p=0 -$ нормальное уравнение плоскости, где $cosalpha, cosbeta$ и $cosgamma -$ направляющие косинусы нормального вектора $overline{N},$ направленного из начала координат в сторону плоскости, а $p>0 -$ расстояние от начала координат до плоскости.
Общее уравнение плоскости приводится к нормальному, путем умножения на нормирующий множитель $mu=-frac{sgn D}{sqrt{A^2+B^2+C^2}}.$
Расстояние от точки $M(x_0, y_0, z_0)$ до плоскости $P: Ax+By+Cz+D=0$ вычисляется по формуле $$d=left|frac{Ax_0+By_0+Cz_0+D}{sqrt{A^2+B^2+C^2}}right|.$$
{jumi[*3]}
Примеры:
2.180.
а) Заданы плоскость $P: -2x+y-z+1=0$ и точка $M(1, 1, 1).$ Написать уравнение плоскости $P’,$ проходящей через точку $M$ параллельно плоскости $P$ и вычислить расстояние $rho(P, P’).$
Решение.
Так как п.лоскости $P$ и $P’$ параллельны, то нормальный вектор для плоскости $P$ будет также нормальным вектором для плоскости $P’.$ Из уравнения плоскости получаем $overline{N}=(-2, 1, -1).$
Далее запишем уравнение плоскости по формуле (2): $A(x-x_0)+B(y-y_0)+C(z-z_0)=0 -$ уравнение плоскости, которая проходит через точку $M(x_0, y_0, z_0)$ перпендикулярно вектору $overline{N}=(A, B, C).$
$-2(x-1)+(y-1)-(z-1)=0Rightarrow -2x+y-z+2=0.$
Ответ: $-2x+y-z+2=0.$
2.181.
а) Написать уравнение плоскости $P’,$ проходящей через заданные точки $M_1(1, 2, 0)$ и $M_2(2, 1, 1)$ перпендикулярно заданной плоскости $P: -x+y-1=0.$
Решение.
Из уравнения плоскости $P,$ находим ее нормальный вектор $overline{N}=(-1, 1, 0).$ Плоскость, перпендикулярная плоскости $P,$ параллельна ее нормальному вектору. Отсюда следует, что можно выбрать точку $M_3(x, y, z)in P’$ такую, что что $overline{M_1M_3}||overline{N}.$
$overline{M_1M_3}=(x-1, y-2, z).$
Условие коллинеарности векторов $overline{M_1M_3}$ и $overline{N}:$ $frac{x_{M_1M_3}}{x_N}=frac{y_{M_1M_3}}{y_N}=frac{z_{M_1M_3}}{z_N}.$
Поскольку $z_N=0,$ то есть вектор $Nin XoY,$ то $z_{M_1M_3}=0.$
$frac{x-1}{-1}=frac{y-2}{1}.$ Пусть $x=2,$ тогда $y=1.$
Мы нашли точку $M_3=(2, 1, 0).$
Так как точка $M_1in P’,$ то и $M_3in P’.$ Запишем уравнение плоскости, которая проходит через три точки $M_1 (1, 2, 0), M_2(2, 1, 1)$ и $M_3(2, 1, 0).$
$begin{vmatrix}x-1&y-2&z\2-1&1-2&1\2-1&1-2&0-0end{vmatrix}=0 Rightarrow $
$begin{vmatrix}x-1&y-2&z\1&-1&1\1&-1&0end{vmatrix}=0 Rightarrow $
$(x-1)(-1)0+(-1)z+(y-2)-(-1)z-(-1)(x-1)-(y-2)0=0Rightarrow$ $Rightarrow-z+y-2+z+x-1=0Rightarrow x+y-3=0.$
Ответ: $x+y-3=0.$
2.182.
а) Написать уравнение плоскости $P,$ проходящей через точку $M(1, 1, 1)$ параллельно векторам $a_1(0, 1, 2)$ и $a_2(-1, 0, 1).$
Решение.
Поскольку вектор $[a_1, a_2]$ перпендикулярен плоскости векторов $a_1$ и $a_2$ (см. векторное произведение), то он будет также перпендикулярен искомой плоскости. То есть вектор $[a_1, a_2]$ является нормальным для плоскости $P.$ Найдем этот вектор:
$[a_1, a_2]=begin{vmatrix}i&j&k\0&1&2\-1&0&1end{vmatrix}=i(1-0)-j(0+2)+k(0+1)=i-2j+k.$
Таким образом $overline{N}=[a_1, a_2]=(1, -2, 1).$
Теперь можно найти уравнение плоскости $P,$ по формуле (2), как плоскости, проходящей через точку $M(1, 1, 1)$ перпендикулярно вектору $overline N=(1, -2, 1):$
$1(x-1)-2(y-1)+1(z-1)=0Rightarrow$
$x-2y+z=0.$
Ответ: $x-2y+z=0.$
2.183.
а) Написать уравнение плоскости $P,$ проходящей через точки $M_1(1, 2, 0)$ и $M_2(2, 1, 1)$ параллельно вектору $a=(3, 0, 1).$
Решение.
Поскольку вектор $a$ параллелен плоскости $P,$ то для всякого вектора $overline{M_1M_3},$ параллельного вектору $a,$ точка $M_3in P.$
Пусть $M_3=(x, y, z).$ Тогда $overline{M_1M_3}=(x-1, y-2, z).$ Так как $overline{M_1M_3}||a,$ то $frac{x_{M_1M_3}}{x_а}=frac{y_{M_1M_3}}{y_а}=frac{z_{M_1M_3}}{z_а}.$ $y_a=0,$ то есть вектор $ain XoZ$ и всякий параллельный ему вектор так же будет принадлежать этой плоскости. Таким образом, $y_{M_1M_3}=y-2=0Rightarrow y=2.$
Из условия параллельности векторов имеем $frac{x-1}{3}=frac{z}{1}.$ Пусть $x=4,$ тогда $z=1.$
Мы получили точку $M_3=(4, 2, 1).$
Запишем уравнение плоскости, которая проходит через три точки $M_1 (1, 2, 0), M_2(2, 1, 1)$ и $M_3(4, 2, 1).$
$begin{vmatrix}x-1&y-2&z\2-1&1-2&1\4-1&2-2&1end{vmatrix}=0 Rightarrow $
$begin{vmatrix}x-1&y-2&z\1&-1&1\3&0&1end{vmatrix}=0 Rightarrow $
$(x-1)(-1)1+1cdot zcdot 0+(y-2)3-3(-1)z-0cdot 1cdot(x-1)-1(y-2)1=0Rightarrow$
$Rightarrow -x+1+3y-6+3z-y+2=0Rightarrow -x+2y+3z-3=0.$
Ответ: $-x+2y+3z-3=0.$
2.184.
а) Написать уравнение плоскости, проходящей через три заданные точки $M_1(1, 2,0),$ $M_2(2, 1, 1)$ и $M_3(3, 0, 1).$
Решение.
Воспользуемся формулой (4):
$begin{vmatrix}x-1&y-2&z\2-1&1-2&1\3-1&0-2&1end{vmatrix}=0 Rightarrow $
$begin{vmatrix}x-1&y-2&z\1&-1&1\2&-2&1end{vmatrix}=0 Rightarrow $
$(x-1)(-1)1+z(-2)+2(y-2)1-2(-1)z-(-2)(x-1)-1(y-2)1=0Rightarrow$
$Rightarrow -x+1+-2z+2y-4+2z+2x-2-y+2=0Rightarrow x+y-3=0.$
Ответ: $x+y-3=0.$
{jumi[*4]}
Прямая в пространстве, всевозможные уравнения.
Литература: Сборник задач по математике. Часть 1. Под ред А. В. Ефимова, Б. П. Демидовича.
Существуют такие формы записи уравнения прямой в пространстве:
1) $left{begin{array}{lcl}A_1x+B_1y+C_1z+D_1=0quad (P_1)\ A_2x+B_2y+C_2z+D_2=0quad (P_2)end{array}right. — $ общее уравнение прямой $L$ в пространстве, как линии пересечения двух плоскостей $P_1$ и $P_2.$
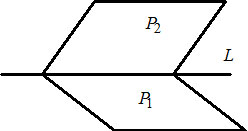
2) $frac{x-x_0}{m}=frac{y-y_0}{n}=frac{z-z_0}{p} -$ каноническое уравнение прямой $L,$ которая проходит через точку $M(x_0, y_0, z_0)$ параллельно вектору $overline{S}=(m, n, p).$ Вектор $overline S$ является направляющим вектором прямой $L.$
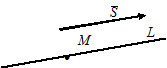
3) $frac{x-x_1}{x_2-x_1}=frac{y-y_1}{y_2-y_1}=frac{z-z_1}{z_2-z_1} -$ уравнение прямой, которая проходит через две точки $A(x_1, y_1, z_1)$ и $B(x_2, y_2, z_2).$
4) Приравнивая каждую из частей канонического уравнения 2 к прараметру $t,$ получаем параметрическое уравнение прямой:
$$left{begin{array}{lcl}x=x_0+mt\ y=y_0+nt\z=z_0+ptend{array}right. $$
Расположение двух прямых в пространстве.
Пусть $L_1:$ $frac{x-x_1}{m_1}=frac{y-y_1}{n_1}=frac{z-z_1}{p_1}$ $overline{S}_1=(m_1, n_1, p_1);$
$L_2:$ $frac{x-x_2}{m_2}=frac{y-y_2}{n_2}=frac{z-z_2}{p_2},$ $overline{S}_2=(m_2, n_2, p_2).$
Условие параллельности двух прямых: Прямые $L_1$ и $L_2$ параллельны тогда и только тогда, когда $overline{S}_1paralleloverline{S}_2Leftrightarrow$ $frac{m_1}{m_2}=frac{n_1}{n_2}=frac{p_1}{p_2}.$
Условие перпендикулярности двух прямых: $L_1perp L_2Leftrightarrow$ $overline{S}_1perpoverline{S}_2Leftrightarrow$ ${m_1}cdot{m_2}+{n_1}cdot{n_2}+p_1cdot p_2=0.$
Угол между прямыми:
$coswidehat{(L_1, L_2)}=$ $frac{overline{S}_1cdotoverline{S}_2}{|overline S_1|cdot|overline S_2|}=frac{{m_1}cdot{m_2}+{n_1}cdot{n_2}+p_1cdot p_2}{sqrt{m_1^2+n_1^2+p_1^2}cdotsqrt{m_2^2+n_2^2+p_2^2}}.$
Расстояние от точки до прямой равно длине перпендикуляра, опущенного из точки на данную прямую.
Пусть прямая $L$ задана уравнением $frac{x-x_0}{m}=frac{y-y_0}{n}=frac{z-z_0}{p},$ следовательно $overline S=(m, n, p).$ Пусть также $M_2=(x_2, y_2, z_2) -$ произвольная точка, принадлежащая прямой $L.$ Тогда расстояние от точки $M_1=(x_1, y_1, z_1)$ до прямой $L$ можно найти по формуле: $$d(M_1, L)=frac{|[overline{M_1M_2}, overline S]|}{|overline S|}.$$
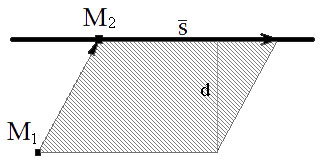
Примеры.
2.198. Написать каноническое уравнение прямой, проходящей через точку $M_0(2, 0, -3)$ параллельно:
а) вектору $q(2, -3, 5);$
б) прямой $frac{x-1}{5}=frac{y+2}{2}=frac{z+1}{-1};$
в) оси $OX;$
д) прямой $left{begin{array}{lcl}3x-y+2z-7=0,\ x+3y-2z-3=0; end{array}right. $
е) прямой $x=-2+t, y=2t, z=1-frac{1}{2}t.$
Решение.
а) Воспользуемся формулой (2) уравнения прямой в пространстве:
$frac{x-x_0}{m}=frac{y-y_0}{n}=frac{z-z_0}{p} -$ каноническое уравнение прямой $L,$ которая проходит через точку $M(x_0, y_0, z_0)$ параллельно вектору $overline{S}=(m, n, p).$
По условию $M_0(2, 0, -3)$ и $overline{S}=q(2,-3,5).$
Таким образом, $frac{x-2}{2}=frac{y-0}{-3}=frac{z-(-3)}{5}Rightarrowfrac{x-2}{2}=frac{y}{-3}=frac{z+3}{5}.$
Ответ: $frac{x-2}{2}=frac{y}{-3}=frac{z+3}{5}.$
б) Прямая, параллельная заданной прямой, должна быть параллельна ее направляющему вектору. Направляющий вектор прямой $frac{x-1}{5}=frac{y+2}{2}=frac{z+1}{-1}$ имеет координаты $overline S(5, 2, -1).$ Далее, находим уравнение прямой проходящей точку $M_0(2, 0, -3)$ параллельно вектору $overline S(5, 2, -1)$ как и в пункте а):
$frac{x-2}{5}=frac{y-0}{2}=frac{z-(-3)}{-1}Rightarrowfrac{x-2}{5}=frac{y}{2}=frac{z+3}{-1}.$
Ответ: $frac{x-2}{5}=frac{y}{2}=frac{z+3}{-1}.$
в) ось OX имеет направляющий вектор $i=(1, 0, 0).$ Таким образом, ищем уравнение прямой проходящей точку $M_0(2, 0, -3)$ параллельно вектору $i(1, 0, 0):$
$frac{x-2}{1}=frac{y-0}{0}=frac{z-(-3)}{0}Rightarrowfrac{x-2}{1}=frac{y}{0}=frac{z+3}{0}.$
Ответ: $frac{x-2}{1}=frac{y}{0}=frac{z+3}{0}.$
д) Прямая, заданная как пересечение двух плоскостей перпендикулярна нормалям обеих плоскостей, поэтому Направляющий вектор прямой
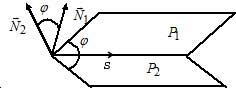
$left{begin{array}{lcl}3x-y+2z-7=0,\ x+3y-2z-3=0; end{array}right.$ можно найти как векторное произведение нормалей заданных плоскостей.
Для плоскости $P_1:$ $3x-y+2z-7=0$ нормальный вектор имеет координаты $N_1(3, -1, 2);$
для плосости $P_2:$ $x+3y-2z-3,$ нормальный вектор имеет координаты $N_2(1, 3, -2).$
Находим векторное произведение:
$[N_1, N_2]=begin{vmatrix}i&j&k\3&-1&2\1&3&-2end{vmatrix}=i(2-6)-j(-6-2)+k(9+1)=-4i+8j+10k.$
Таким образом, направляющий вектор прямой $left{begin{array}{lcl}3x-y+2z-7=0,\ x+3y-2z-3=0; end{array}right.$ имеет координаты $overline S (-4, 8, 10).$
Далее нам необходимо найти уравнение прямой проходящей точку $M_0(2, 0, -3)$ параллельно вектору $overline S(-4, 8, 10):$
$frac{x-2}{-4}=frac{y-0}{8}=frac{z-(-3)}{10}Rightarrowfrac{x-2}{-4}=frac{y}{8}=frac{z+3}{10}.$
Ответ: $frac{x-2}{-4}=frac{y}{8}=frac{z+3}{10}.$
{jumi[*4]}
е) Найдем направляющий вектор прямой $x=-2+t, y=2t, z=1-frac{1}{2}t.$ Для этого запишем уравнение этой прямой в каноническом виде:
$left{begin{array}{lcl}x=-2+t,\ y=2t,\z=1-frac{1}{2}t end{array}right.Rightarrow$ $left{begin{array}{lcl}t=x+2,\ t=frac{y}{2},\t=frac{z-1}{-frac{1}{2}} end{array}right.$ $Rightarrowfrac{x+2}{1}=frac{y}{2}=frac{z-1}{-frac{1}{2}}.$
Отсюда находим направляющий вектор $overline Sleft(1, 2, -frac{1}{2}right).$ Умножим координаты направляющего вектора на 2 (чтобы избавиться от дроби): $overline S_1(2, 4, -1).$
Далее нам необходимо найти уравнение прямой проходящей точку $M_0(2, 0, -3)$ параллельно вектору $overline S(2, 4, -1):$
$frac{x-2}{2}=frac{y-0}{4}=frac{z-(-3)}{-1}Rightarrowfrac{x-2}{2}=frac{y}{4}=frac{z+3}{-1}.$
Ответ: $frac{x-2}{2}=frac{y}{4}=frac{z+3}{-1}.$
2.199(a). Написать уравнение прямой, проходящей через две заданные точки $M_1 (1, -2, 1)$ и $M_2(3, 1, -1).$
Решение.
Воспользуемся формулой (3) уравнения прямой в пространстве:
$frac{x-x_1}{x_2-x_1}=frac{y-y_1}{y_2-y_1}=frac{z-z_1}{z_2-z_1} -$ уравнение прямой, которая проходит через две точки $A(x_1, y_1, z_1)$ и $B(x_2, y_2, z_2).$
Подставляем заданные точки:
$frac{x-1}{3-1}=frac{y+2}{1+2}=frac{z-1}{-1-1} Rightarrow$ $frac{x-1}{2}=frac{y+2}{3}=frac{z-1}{-2}.$
Ответ: $frac{x-1}{2}=frac{y+2}{3}=frac{z-1}{-2}.$
2.204. Найти расстояние между параллельными прямыми
$frac{x-2}{3}=frac{y+1}{4}=frac{z}{2}$ и $frac{x-7}{3}=frac{y-1}{4}=frac{z-3}{2}.$
Решение.
Расстояние между параллельными прямыми $L_1$ и $L_2$ равно расстоянию от произвольной точки прямой $L_1$ до прямой $L_2.$ Следовательно, его можно найти по формуле $$d(L_1, L_2)=d(M_1, L_2)=frac{|[overline{M_1M_2}, overline S]|}{|overline S|},$$ где $M_1-$ произвольная точка прямой $L_1,$ $M_2 — $произвольная точка прямой $L_2,$ $overline S -$ направляющий вектор прямой $L_2.$
Из канонических уравнений прямых берем точки $M_1=(2, -1, 0)in L_1,$ $M_2=(7, 1, 3)in L_2,$ $overline S=(3, 4, 2).$
Отсюда находим $overline{M_1M_2}=(7-2, 1-(-1),3-0)=(5, 2, 3);$
$[overline{M_1M_2}, overline S]=begin{vmatrix}i&j&k\5&2&3\3&4&2end{vmatrix}=i(4-12)-j(10-9)+k(20-6)=$ $=-8i-j+14k.$
$|[overline{M_1M_2},overline S]|=sqrt{8^2+1+14^2}=sqrt{64+1+196}=sqrt{261}=sqrt{9* 29}=3sqrt{29}.$
$|overline S|=sqrt{3^2+4^2+2^2}=sqrt{9+16+4}=sqrt{29}$
$$d(L_1, L_2)=frac{|[overline{M_1M_2}, overline S]|}{|overline S|}=frac{3sqrt{29}}{sqrt{29}}=3.$$
Ответ: 3.
2.205 (а). Найти расстояние от точки $A(2, 3, -1)$ до заданной прямой $L:$ $left{begin{array}{lcl}2x-2y+z+3=0,\ 3x-2y+2z+17=0 end{array}right.$
Решение.
Для того, чтобы найти расстояние от точки $A$ до прямой $L,$ нам необходимо выбрать произвольную точку $M,$ принадлежащую прямой $L$ и найти направляющий вектор этой прямой.
Выбираем точку $M.$ Пусть координата $z=0.$ Подставим это значение в данную систему:
$left{begin{array}{lcl}2x-2y+0+3=0,\ 3x-2y+0+17=0 end{array}right.Rightarrow$ $left{begin{array}{lcl}2x-2y+3=0,\ 3x-2y+17=0 end{array}right.-Rightarrow$ $left{begin{array}{lcl}x+14=0,\ 2x-2y+3=0 end{array}right.Rightarrow$ $left{begin{array}{lcl}x=-14,\ -28-2y+3=0 end{array}right.Rightarrow$ $left{begin{array}{lcl}x=-14,\ y=-frac{25}{2}. end{array}right.$
Таким образом, $M=(-14, -frac{25}{2}, 0)$
Направляющий вектор найдем, как векторное произведение нормалей заданных плоскостей:
Для плоскости $P_1:$ $2x-2y+z+3=0$ нормальный вектор имеет координаты $N_1(2, -2, 1);$
для плосости $P_2:$ $3x+2y+2z+17=0,$ нормальный вектор имеет координаты $N_2(3, -2, 2).$
Находим векторное произведение:
$[N_1, N_2]=begin{vmatrix}i&j&k\2&-2&1\3&-2&2end{vmatrix}=i(-4+2)-j(4-3)+k(-4+6)=-2i-j+2k.$
Таким образом, направляющий вектор прямой $left{begin{array}{lcl}2x-2y+z+3=0,\ 3x-2y+2z+17=0 end{array}right.$
имеет координаты $overline S (-2, -1, 2).$
Теперь можно воспользоваться формулой $$d(A, L)=frac{|[overline{AM}, overline S]|}{|overline S|}.$$
$overline{AM}=left(2-(-14),3-left(-frac{25}{2}right),-1-0right)=left(16, 15frac{1}{2}, -1right)$
$[overline{AM}, overline S]=begin{vmatrix}i&j&k\16&15,5&-1\-2&-1&2end{vmatrix}=i(31-1)-j(32-2)+k(-16+31)=$ $=30i-30j+15k.$
$|[overline{AM},overline S]|=sqrt{30^2+30^2+15^2}=sqrt{900+900+225}=sqrt{2025}=45.$
$|overline S|=sqrt{2^2+1^2+2^2}=sqrt{4+1+4}=3$
$$d(A, L)=frac{|[overline{AM}, overline S]|}{|overline S|}=frac{45}{3}=15.$$
Ответ: $d(A, L)=15.$
2.212. Написать каноническое уравнение прямой, которая проходит через точку $M_0(3, -2, -4)$ параллельно плоскости $P: 3x-2y-3z-7=0$ и пересекает прямую $L: frac{x-2}{3}=frac{y+4}{-2}=frac{z-1}{2}.$
Решение.
Запишем уравнение плоскости $P_1,$ которая проходит через точку $M_0(3, -2, -4)$ параллельно плоскости $3x-2y-3z-7=0:$
$P: 3x-2y-3z-7=0Rightarrow overline N=(3; -2; -3).$ Искомая плоскость проходит через точку $M_0(3, -2, -4)$ перпендикулярно вектору $overline N(3, -2, -3).$
$P_1: 3(x-3)-2(y+2)-3(z+4)=0Rightarrow $
$P_1: 3x-9-2y-4-3z-12=0 Rightarrow$
$P_1: 3x-2y-3z-25=0.$
Далее найдем точку пересечения плоскости $P_1$ и прямой $L.$ Для этого запишем уравнение прямой $L$ в параметрической форме:
$L: frac{x-2}{3}=frac{y+4}{-2}=frac{z-1}{2}=tRightarrow$
$left{begin{array}{lcl}x=3t+2,\ y=-2t-4,\z=2t+1. end{array}right.$
Далее, подставим значения $x, y$ и $z,$ выраженные через $t$ в уравнение плоскости $P_1,$ и из полученного уравнения выразм $t:$
$3x-2y-3z-25=0$
$3(3t+2)-2(-2t-4)-3(2t+1)-25=0$
$9t+6+4t+8-6t-3-25=0$
$7t-14=0$
$t=frac{14}{7}=2$
Подставляя найденное занчение $t$ в уравнение прямой $L,$ найдем координаты точки пересечения:
$left{begin{array}{lcl}x=3t+2,\ y=-2t-4,\z=2t+1. end{array}right.Rightarrow $ $left{begin{array}{lcl}x=6+2=8,\ y=-4-4=-8,\z=4+1=5. end{array}right.$
Таким образом, прямая $L$ и плоскость $P_1$ пересекаются в точке $M_1(8, -8, 5).$
Теперь запишем уравнение прямой, проходящей через точки $M_0(3, -2. -4)$ и $M_1(8, -8, 5)$— это и будет искомая прямая. Воспользуемся формулой (3) $frac{x-x_1}{x_2-x_1}=frac{y-y_1}{y_2-y_1}=frac{z-z_1}{z_2-z_1} :$
$frac{x-3}{8-3}=frac{y+2}{-8+2}=frac{z+4}{5+4}Rightarrow$ $frac{x-3}{5}=frac{y+2}{-6}=frac{z+4}{9}.$
Ответ: $frac{x-3}{5}=frac{y+2}{-6}=frac{z+4}{9}.$
Домашнее задание.
2.199.
б) Написать уравнение прямой, проходящей через две заданные точки $M_1 (3, -1, 0)$ и $M_2(1, 0, -3).$
Ответ: $frac{x-3}{-2}=frac{y+1}{1}=frac{z}{-3}.$
2.205.
б) Найти расстояние от точки $A(2, 3, -1)$ до заданной прямой $L:$ $left{begin{array}{lcl}x=3t+5,\ y=2t,\z=-2t-25. end{array}right.$
Ответ: 21.
2.206. Доказать, что прямые $L_1: left{begin{array}{lcl}2x+2y-z-10=0,\ x-y-z-22=0, end{array}right.$ и $L_2: frac{x+7}{3}=frac{y-5}{-1}=frac{z-9}{4}.$ параллельны и найти расстояние $rho(L_1, L_2)$
Ответ: 25.
2.207. Составить уравнения прямой, проходящей через точки пересечения плоскости $x-3y+2z+1=0$ с прямыми $frac{x-5}{5}=frac{y+1}{-2}=frac{z-3}{-1}$ и $frac{x-3}{4}=frac{y+4}{-6}=frac{z-5}{2}.$
Ответ: $frac{x+1}{7}=frac{y-2}{-1}=frac{z-3}{-5}.$
2.211. Написать уравнение прямой, проходящей через точку $M_0(7, 1, 0)$ параллельно плоскости $2x+3y-z-15=0$ и пересекающей прямую $frac{x}{1}=frac{y-1}{4}=frac{z-3}{2}.$
Ответ: $frac{x-7}{67}=frac{y-1}{-28}=frac{z}{70}.$
{jcomments on}