Преобразование
электрической энергии в механическую
при работе ДПТ сопровождается потерями
энергии. Отношение полезной механической
мощности Р2
на валу двигателя к потребляемой из
сети электрической мощности Р1
определяет коэффициент полезного
действия (КПД) двигателей
η
=
![]() ∙
∙
100% =![]() ∙
∙
100%
Полезная механическая
мощность Р2
, снимаемая с вала двигателя, рассчитывается
по формуле
Р2
= 0,105 М∙n
, Вт (6.9)
где М
= МС
– момент сопротивления на валу двигателя,
Нм;
n
– частота вращения вала двигателя,
об/мин.
Так как двигатель
обладает «саморегулированием», то
вращающий момент, развиваемый двигателем,
равен моменту сопротивления на его
валу, т.е. МВР
= МС
= М, поэтому, зная полезную мощность
двигателя, можно определить его вращающий
момент по выражению
М
= 9,55
![]() , Нм
, Нм
(6.10)
Потребляемая
двигателем мощность Р1
определяется по формуле
Р1
= U∙I
= U∙
(Iя
+ Iв)
, Вт (6.11)
где U
– напряжение питания двигателя.
I
= Iя
+ Iв
— ток, потребляемый из сети двигателем
с параллельным возбуждением.
ΔР = ΔРэ
+ ΔРст
+ ΔРмех
— сумма всех потерь двигателя постоянного
тока, Вт.
где ΔРэ
– электрические потери;
ΔРст
– потери в стали статора и якоря;
ΔРмех
– механические потери.
Электрические
потери ΔРэ
являются переменными, так как зависят
от нагрузки и их значения может быть
представлено как
ΔРэ
= ΔРя
+ ΔРв
+ ΔРщ
где ΔРя
= Iя2
Rя
– потери в обмотке якоря (при номинальном
режиме составляют 50% всех потерь);
ΔРв
= Iв2
Rв
– потери в обмотке возбуждения;
ΔРщ
= Iя2
ΔUщ
– потери на коллекторно-щеточном
контакте;
ΔUщ
– падение напряжения между щеткой и
коллектором (зависит от материала
щеток: ΔUщ
= 2 В для графитовых и 0,6 В для металлографитовых
щеток.)
Потери в стали
ΔРст
связаны с вихревыми токами и
перемагничивании якоря при его вращении
и составляет 1 – 3% от номинальной мощности
двигателя.
Механические
потери ΔРмех
связаны с трением движущихся частей
двигателя и составляют 1 -2 % от номинальной
мощности двигателя. Эти потери, как и
потери в стали, являются постоянными и
не зависят от нагрузки двигателя. Их
называют потерями холостого хода.
При работе ДПТ
вхолостую Р2
= 0 и η=
0 при увеличении полезной мощности Р2
КПД растет. Двигатели рассчитывают так,
чтобы максимальное значение КПД
соответствовало номинальной мощности
двигателя (при этом постоянные потери
равны переменным). При нагрузке больше
номинальной КПД уменьшается за счет
значительного роста переменных потерь.
Для машин мощностью 1 – 100 кВт номинальное
значение КПД лежит в пределах 74 – 92 %.
6.6. Основные характеристики двигателя постоянного тока
Основными
характеристика ДПТ, получаемыми
теоретически или экспериментально,
являются его механическая характеристика,
а также рабочая и регулировочная
характеристики.
Механической
характеристикой двигателя называется
зависимость частоты вращения якоря n
от момента М на валу двигателя: n
= f(М).
Уравнением механической характеристики
является выражение (6.7).
![]()
Механическая
характеристика двигателя с параллельным
возбуждением представляет собой прямую
с незначительным наклоном по мере роста
момента на валу (рис.6.7). Такая характеристика
называется «жесткой».
 n
n



nном

Мном
М
Рис. 6.7. Механическая
характеристика ДПТ с параллельным
возбуждением.
Жесткость
механической характеристики объясняется
тем, что при параллельном включении
обмотки возбуждения, с ростом момента
нагрузки, ток возбуждения Iв,
а следовательно, и магнитный поток
двигателя Ф остаются неизменными, а
сопротивление якоря Rя
сравнительно мало.
Рабочие характеристики
ДПТ представляют собой зависимости
частоты вращения n,
момента М, тока якоря Iя
и КПД η
от полезной мощности Р2
на валу двигателя при неизменном
напряжении на его зажимах U
= const.
Рабочие характеристики ДПТ с параллельным
возбуждением представлены на рис. 6.8.
Зависимость
полезного момента на валу двигателя от
нагрузки Р2
представляет собой почти прямую линию,
так как момент этого двигателя
пропорционален нагрузке на валу: М =
9,55 Р2/n.
Искривление указанной зависимости
объясняется некоторым снижением частоты
вращения с увеличением нагрузки. При
Р2
= 0 ток, потребляемый электродвигателем
равен току холостого хода. При увеличении
мощности, развиваемой электродвигателем,
ток якоря увеличивается приблизительно
по той же зависимости, что и момент
нагрузки на валу, так как при условии Ф
= const
токе якоря пропорционален моменту
нагрузки.
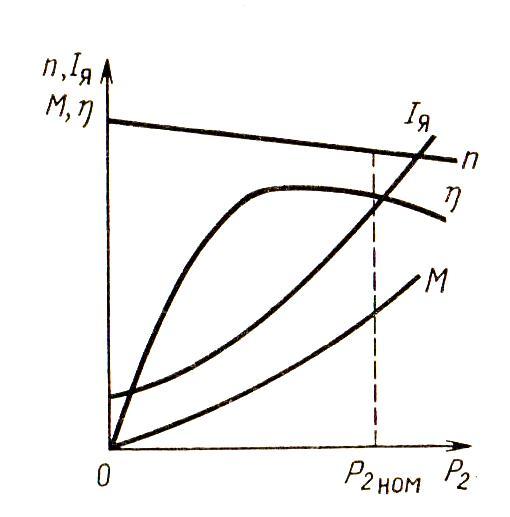
Рис. 6.8. Рабочие
характеристики ДПТ с параллельным
возбуждением.
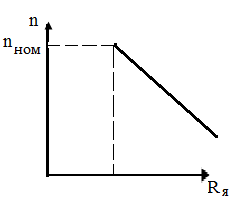
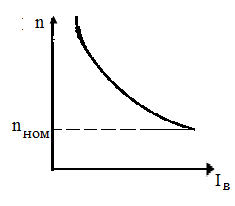
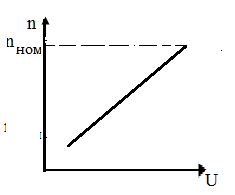
В соответствии с
тремя вышеуказанными способами
регулирования частоты вращения двигателя,
его регулировочными характеристиками
являются зависимости: n
= f
(Rя),
n
= f
(Iв),
и n
= f
(U),
где Rя
– сопротивление якорной цепи, равное
сумме сопротивлений самого якоря и
реостата регулирования тока возбуждения;
Iв
– ток возбуждения, вызывающий
пропорциональный ему магнитный поток
возбуждения Ф;
U
– напряжение, подаваемое на обмотку
якоря, при соблюдении условия Ф = const,
т.е. Iв
= const.
Примерный вид
регулировочных характеристик, получаемых
из выражения (6.7) при условии М = const,
представлен на рис. 6.9.
а)
б) с)
Рис. 6.9. Регулировочные
характеристики ДПТ с параллельным
возбуждением: а) n
= f
(Rя),
б) n
= f
(Iв)
с) n
= f
(U).
Содержание
1. ПОСТОЯННЫЙ
ТОК…………………………………………………………..1
1.1. Простейшая
цепь постоянного тока…………….…………………………..1
1.2. Баланс мощностей
в простейшей цепи постоянного тока………………..7
1.3. Последовательное
соединение сопротивлений……………………………9
1.4. Параллельное
соединения сопротивлений……………………………….10
1.5. Смешанное
соединение сопротивлений………………………………….12
1.6. Холостой ход и
короткое замыкание ………………………………………13
1.7. Расчет сложных
электрических цепей постоянного
тока…….….………14
1.7.1. Метод
непосредственного применения законов
Кирхгофа…..….…….14
1.7.2. Метод контурных
токов…………………………………………………..17
2. ОДНОФАЗНЫЙ
ПЕРЕМЕННЫЙ ТОК………………………..……………18
2.1. Получение
однофазного переменного тока……………………..………..18
2.2. Цепь переменного
тока с активным сопротивлением………..…………..20
2.3 Цепь переменного
тока с индуктивным сопротивлением………..……….23
2.4. Цепь переменного
тока с ёмкостным сопротивлением………..…………25
2.5. Цепь переменного
тока с последовательным
соединением
активного, индуктивного и ёмкостного
сопротивлений
(последовательная
R-L-C цепь)……………………………………………….28
2.6. Резонанс
напряжений……………………………………………………..31
2.7. Цепь переменного
тока с параллельным соединением
активного,
индуктивного и ёмкостного сопротивлений
(параллельная
R-L-C цепь) ……………………………………………….……34
2.8. Понятие
эквивалентной проводимости………………………………….36
2.9. Резонанс
токов……………………………………………………………..37
3. ТРЕХФАЗНЫЙ
ПЕРЕМЕННЫЙ ТОК…………………………………….39
3.1. Трехфазный ток
и его получение…………………………………………39
3.2. Соединение
звездой. Четырехпроводная система
трехфазного……… 41
3.3 Соединение
звездой. Трехпроводная система трехфазного
тока………46
3.4. Соединение по
схеме «треугольник»…………………………………….48
3.5. Мощность
трехфазной системы……………………………………………50
3.6. Измерения
мощности потребляемой
трехфазными
электроприемниками…………………………………..………..50
4.
ТРАНСФОРМАТОРЫ……………………………………………………….
53
4.1. Назначение,
области применения и классификация
трансформаторов..53
4.2. Устройство и
принцип работы однофазного
двухобмоточного
трансформатора……………………………………………..54
4.3. Холостой ход
трансформатора……………………………………………..56
4.4. Схема замещения
трансформатора в режиме холостого хода.
…………..60
4.5. Приведение
вторичной обмотки трансформатора………………………..60
4.6. Схема замещения
трансформатора в рабочем режиме……………………62
4.7. Векторная
диаграмма рабочего режима
трансформатора………………..63
4.8. Коэффициент
полезного действия трансформатора………………………65
4.9. Экспериментальное
определение параметров трансформаторов
……….66
4.9.1. Опыт холостого
хода……………………………………………………..67
4.9.2.. Опыт короткого
замыкания……………………………………………..69
4.10 Нагрузочные
характеристики трансформатора…………………………..71
5. АИНХРОННЫЕ
ЭЛЕКТРОДВИГАТЕЛИ… ………………………………72
5.1. Принцип действия
и области применения асинхронных
двигателей….72
5.2. Получение
вращающегося магнитного поля………………………….…..73
5.3. Конструкция
асинхронных двигателей……………………………………77
5.4.
Скольжение………………………………………………………………….78
5.5. Магнитные
потоки и ЭДС асинхронного двигателя…………………….79
5.6. Основные
уравнения асинхронного двигателя……………………….…..80
5.7. Приведение
параметров обмотки ротора к обмотке
статора…………….81
5.8. Векторная
диаграмма асинхронного двигателя…………………………..82
5.9. Схема замещения
асинхронного двигателя………………………………82
5.10. Потери мощности
и КПД асинхронного двигателя……………..…….83
5.11. Уравнение
вращающего момента………………………………….…….85
5.12. Механические
характеристики асинхронного
двигателя………………85
5.13. Рабочие
характеристики асинхронного
двигателя………………………88
5.14. Пуск, регулирование
частоты вращения и торможение
асинхронного
двигателя……………………………..…………………………88
6. ЭЛЕКТРОДВИГАТЕЛИ
ПОСТОЯННОГО ТОКА…………………………90
6.1. Назначение,
устройство и способы возбуждения
двигателей
постоянного тока……………………………………………..…….90
6.2. Принцип действия
двигателя постоянного тока
и его основные
уравнения………………………………………………………92
6.3. Пуск и
реверсирование двигателя постоянного
тока…………………….94
6.4. Регулирование
скорости вращения двигателя……………………………96
6.5. Коэффициент
полезного действия двигателя…………………………….98
6.6. Основные
характеристики двигателя постоянного
тока…………………99
108
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
Коэффициент полезного действия машины постоянного тока
Автор: Евгений Живоглядов.
Дата публикации: 23 января 2013 .
Категория: Статьи.
Общие положения
Коэффициент полезного действия определяется как отношение полезной, или отдаваемой, мощности P2 к потребляемой мощности P1:
 |
(1) |
или в процентах
 |
(2) |
Современные электрические машины имеют высокий коэффициент полезного действия (к. п. д.). Так, у машин постоянного тока мощностью 10 кВт к. п. д. составляет 83 – 87%, мощностью 100 кВт – 88 – 93% и мощностью 1000 кВт – 92 – 96%. Лишь малые машины имеют относительно низкие к. п. д.; например, у двигателя постоянного тока мощностью 10 Вт к. п. д. 30 – 40%.
Рисунок 1. Зависимость коэффициента полезного действия электрической машины от нагрузки
Кривая к. п. д. электрической машины η = f(P2) сначала быстро растет с увеличением нагрузки, затем к. п. д. достигает максимального значения (обычно при нагрузке, близкой к номинальной) и при больших нагрузках уменьшается (рисунок 1). Последнее объясняется тем, что отдельные виды потерь (электрические Iа 2 rа и добавочные) растут быстрее, чем полезная мощность.
Прямой и косвенный методы определения коэффициента полезного действия
Прямой метод определения к. п. д. по экспериментальным значениям P1 и P2 согласно формуле (1) может дать существенную неточность, поскольку, во-первых, P1 и P2 являются близкими по значению и, во-вторых, их экспериментальное определение связано с погрешностями. Наибольшие трудности и погрешности вызывает измерение механической мощности.
Если, например, истинные значения мощности P1 = 1000 кВт и P2 = 950 кВт могут быть определены с точностью 2%, то вместо истинного значения к. п. д.

Поэтому ГОСТ 25941-83, «Машины электрические вращающиеся. Методы определения потерь и коэффициента полезного действия», предписывает для машин с η% ≥ 85% косвенный метод определения к. п. д., при котором по экспериментальным данным определяется сумма потерь pΣ.
 |
(3) |
Применив здесь подстановку P1 = P2 + pΣ, получим другой вид формулы:
 |
(4) |
Так как более удобно и точно можно измерять электрические мощности (для двигателей P1 и для генераторов P2), то для двигателей более подходящей является формула (3) и для генераторов формула (4). Методы экспериментального определения отдельных потерь и суммы потерь pΣ описываются в стандартах на электрические машины и в руководствах по испытанию и исследованию электрических машин. Если даже pΣ определяется со значительно меньшей точностью, чем P1 или P2, при использовании вместо выражения (1) формул (3) и (4) получаются все же значительно более точные результаты.
Условия максимума коэффициента полезного действия
Различные виды потерь различным образом зависят от нагрузки. Обычно можно считать, что одни виды потерь остаются постоянными при изменении нагрузки, а другие являются переменными. Например, если генератор постоянного тока работает с постоянной скоростью вращения и постоянным потоком возбуждения, то механические и магнитные потери являются также постоянными. Наоборот, электрические потери в обмотках якоря, добавочных полюсов и компенсационной изменяются пропорционально Iа², а в щеточных контактах – пропорционально Iа. Напряжение генератора при этом также приблизительно постоянно, и поэтому с определенной степенью точности P2 ∼ Iа.
Таким образом, в общем, несколько идеализированном случае можно положить, что
где коэффициент нагрузки
Определяет относительную величину нагрузки машины.
Суммарные потери также можно выразить через kнг:
где p0 – постоянные потери, не зависящие от нагрузки; p1 – значение потерь, зависящих от первой степени kнг при номинальной нагрузке; p2 – значение потерь, зависящих от квадрата kнг, при номинальной нагрузке.
Подставим P2 из (5) и pΣ из (7) в формулу к. п. д.

 |
(8) |
Установим, при каком значении kнг к. п. д. достигает максимального значения, для чего определим производную dη/dkнг по формуле (8) и приравняем ее к нулю:

Это уравнение удовлетворяется, когда его знаменатель равен бесконечности, т. е. при kнг = ∞. Этот случай не представляет интереса. Поэтому необходимо положить равным нулю числитель. При этом получим
Таким образом, к. п. д. будет максимальным при такой нагрузке, при которой переменные потери kнг² × p2, зависящие от квадрата нагрузки, становятся равными постоянным потерям p0.
Значение коэффициента нагрузки при максимуме к. п. д., согласно формуле (9),
 |
(10) |
Если машина проектируется для заданного значения ηмакс, то, поскольку потери kнг × p1 обычно относительно малы, можно считать, что
Изменяя при этом соотношение потерь p0 и p2, можно достичь максимального значения к. п. д. при различных нагрузках. Если машина работает большей частью при нагрузках, близких к номинальной, то выгодно, чтобы значение kнг [смотрите формулу (10)] было близко к единице. Если машина работает в основном при малых нагрузках, то выгодно, чтобы значение kнг [смотрите формулу (10)] было соответственно меньше.
Источник: Вольдек А. И., «Электрические машины. Учебник для технических учебных заведений» – 3-е издание, переработанное – Ленинград: Энергия, 1978 – 832с.
Основные уравнения двигателя постоянного тока (ДПТ)

В этой статье описаны основные формулы, величины и их обозначения которые относятся ко всем двигателям постоянного тока.
В результате взаимодействия Iя тока якоря в проводнике L обмотки якоря с внешним магнитным полем возникает электромагнитная сила создающая электромагнитный момент М который приводит якорь во вращение с частотой n.
Противо ЭДС двигателя Eя
При вращении якоря пазовый проводник пресекает линии поля возбуждения с магнитной индукцией B и в соответствии с явлением электромагнитной индукции в проводнике наводится ЭДС Eя направленная навстречу Iя. Поэтому эта ЭДС называется противо ЭДС и она прямо пропорциональна Ф магнитному потоку и частоте вращения n.
Ce — постоянный коэффициент определяемой конструкцией двигателя.
Применив второй закон Кирхгофа получаем уравнение напряжения двигателя.
где ∑R — суммарное сопротивления обмотки якоря включающая сопротивление :
- обмотки якоря
- добавочных полюсов
- обмотки возбуждения (для двигателей с последовательным возбуждением)
Ток якоря Iя
Выразим из формулы 2 ток якоря.

Частота вращения якоря
Из формул 1 и 2 выведем формулу для частоты вращения якоря.

Электромагнитная мощность двигателя
Электромагнитный момент

где: ω = 2*π*f — угловая скорость вращения якоря, Cм — постоянный коэффициент двигателя (включает в себя конструктивные особенности данного двигателя)

Момент на валу двигателя, т.е. полезный момент, где М0 момент холостого хода;
Реферат: Двигатели постоянного тока
Министерство образования и науки Российской Федерации
ГОУ ВПО Южно-Уральский государственный университет
Филиал в г. Златоусте
Двигатели постоянного тока
Выполнил: Шарипова Ю.Р.
2. Устройство и принцип действия двигателей постоянного тока
3. Пуск двигателей
4. Технические данные двигателей
5. Кпд двигателей постоянного тока
6 Характеристики двигателя постоянного тока
6.1 Рабочие характеристики
6.2 Механическая характеристика
7. Список используемой литературы
Электрические машины постоянного тока широко применяются в различных отраслях промышленности.
Значительное распространение электродвигателей постоянного тока объясняется их ценными качествами: высокими пусковым, тормозным и перегрузочным моментами, сравнительно высоким быстродействием, что важно при реверсировании и торможении, возможностью широкого и плавного регулирования частоты вращения.
Электродвигатели постоянного тока используют для регулируемых приводов, например, для приводов различных станков и механизмов. Мощности этих электродвигателей достигают сотен киловатт. В связи с автоматизацией управления производственными процессами и механизмами расширяется область применения маломощных двигателей постоянного тока общего применения мощностью от единиц до сотен ватт.
В зависимости от схемы питания, обмотки возбуждения машины постоянного тока разделяются на несколько типов (с независимым, параллельным, последовательным и смешанным возбуждением).
Ежегодный выпуск машин постоянного тока в РФ значительно меньше выпуска машин переменного тока, что обусловлено дороговизной двигателей постоянного тока.
Вначале создавались машины постоянного тока. В дальнейшем они в значительной степени были вытеснены машинами переменного тока. Благодаря возможности плавного и экономичного регулирования скорости вращения двигатели постоянного тока сохраняют свое доминирующее значение на транспорте, для привода металлургических станков, в крановых и подъемно-транспортных механизмах. В системах автоматики машины постоянного тока широко используются в качестве исполнительных двигателей, двигателей для привода лентопротяжных самозаписывающих механизмов, в качестве тахогенераторов и электромашинных усилителей.
2. Устройство и принцип действия двигателей постоянного тока
Устройство машин постоянного тока (генераторов и двигателей) в упрощенном виде показано на рис.1. К стальному корпусу 1 статора машины прикреплены главные 2 и дополнительные 4 полюса. На главных полюсах расположена обмотка возбуждения 3, на дополнительных — обмотка дополнительных полюсов 5. Обмотка возбуждения создает магнитный поток Ф машины.
На валу 10 двигателя закреплен цилиндрический магнитопровод 6, в пазах которого расположена обмотка якоря 7. Секции обмотки якоря присоединены к коллектору 9. К нему же прижимаются пружинами неподвижные щетки 8. Закрепленный на валу двигателя коллектор состоит из ряда изолированных от него и друг от друга медных пластин. С помощью коллектора, и щеток осуществляется соединение обмотки якоря с внешней электрической цепью. У двигателей они, кроме того, служат для преобразования постоянного по направлению тока внешней цепи в изменяющийся по направлению ток в проводниках обмотки якоря.
Дополнительные полюса с расположенной на них обмоткой уменьшают искрение между щетками и коллектором машины. Обмотку дополнительных полюсов соединяют последовательно с обмоткой якоря и на электрических схемах часто не изображают.
Для уменьшения потерь мощности магнитопровод якоря выполнен из отдельных стальных листов. Все обмотки изготовлены из изолированного провода. Кроме двигателей, имеющих два главных полюса, существуют машины постоянного тока с четырьмя и бόльшим количеством главных полюсов. При этом соответственно увеличивается количество дополнительных полюсов и комплектов щеток.
Если двигатель включен в сеть постоянного напряжения, то при взаимодействии магнитного поля, созданного обмоткой возбуждения, и тока в проводниках якоря возникает вращающий момент, действующий на якорь:
(1)
(2)
где КМ — коэффициент, зависящий от конструктивных параметров машины; Ф — магнитный поток одного полюса; IЯ — ток якоря.
Если момент двигателя при n = 0 превышает тормозящий момент, которым нагружен двигатель, то якорь начнет вращаться. При увеличении частоты вращения n возрастает индуцируемая в якоре ЭДС. Это приводит к уменьшению тока якоря:
(3)
где rЯ — сопротивление якоря.
Следствием уменьшения тока IЯ является уменьшение момента двигателя. При равенстве моментов двигателя и нагрузки частота вращения перестает изменяться.
Направление момента двигателя и, следовательно, направление вращения якоря зависят от направления магнитного потока и тока в проводниках обмотки якоря. Чтобы изменить направление вращения двигателя, следует изменить направление тока якоря либо тока возбуждения.
3. Пуск двигателей
Из формулы (3) следует, что в первое мгновение после включения двигателя в сеть постоянного напряжения, т.е. когда и ,
Так как сопротивление rЯ невелико, то ток якоря может в 10…30 раз превышать номинальный ток двигателя, что недопустимо, поскольку приведет к сильному искрению и разрушению коллектора. Кроме того, при таком токе возникает недопустимо большой момент двигателя, а при частых пусках возможен перегрев обмотки якоря.
Чтобы уменьшить пусковой ток в цепи якоря, включают пусковой резистор, сопротивление которого по мере увеличения частоты вращения двигателя уменьшают до нуля. Если пуск двигателя автоматизирован, то пусковой резистор выполняют из нескольких ступеней, которые выключают последовательно по мере увеличения частоты вращения.
Пусковой ток якоря
По мере разгона двигателя в обмотке якоря возрастает ЭДС, а как следует из формулы (3), это приводит к уменьшению тока якоря IЯ . Поэтому по мере увеличения частоты вращения двигателя сопротивление в цепи якоря уменьшают. Чтобы при сравнительно небольшом пусковом токе получить большой пусковой момент, пуск двигателя осуществляют с наибольшим магнитным потоком. Следовательно, ток возбуждения при пуске должен быть максимально допустимым, т.е. номинальным.
4.Технические данные двигателей
В паспорте двигателя и справочной литературе на двигатели постоянного тока указаны следующие технические данные: номинальные напряжение Uи , мощность Pн , частота вращения nн, ток Iн , КПД.
Под номинальным Uн понимают напряжение, на которое рассчитаны обмотка якоря и коллектор, а также в большинстве случаев и параллельная обмотка возбуждения. С учетом номинального напряжения выбирают электроизоляционные материалы двигателя.
Номинальный ток Iн – максимально допустимый ток (потребляемый из сети), при котором двигатель нагревается до наибольшей допустимой температуры, работая в том режиме (длительном, повторно-кратковременном, кратковременном), на который рассчитан:
где Iян — ток якоря при номинальной нагрузке; Iвн – ток обмотки возбуждения при номинальном напряжении.
Следует отметить, что ток возбуждения Iвн двигателя параллельного возбуждения сравнительно мал, поэтому при номинальной нагрузке обычно принимают
Номинальная мощность Рн — это мощность, развиваемая двигателем на валу при работе с номинальной нагрузкой (моментом) и при номинальной частоте вращения nн .
Частота вращения nн, и КПД соответствуют работе двигателя с током Iн , напряжением Uн без дополнительных резисторов в цепях двигателя.
В общем случае мощность на валу P2 , момент М и частота вращения n связаны соотношением:
Потребляемая двигателем из сети мощность Р1 , величины P2, КПД, U, I связаны соотношениями:
где
Очевидно, что эти соотношения справедливы также и для номинального режима работы двигателя.
5. КПД двигателей постоянного тока
Коэффициент полезного действия является важнейшим показателем двигателей постоянного тока. Чем он больше, тем меньше мощность Р и ток I, потребляемые двигателем из сети при одной и той же механической мощности. В общем виде зависимостьть такова:
(9)
где — потери в обмотке якоря; — потери в обмотке возбуждения; — потери в магнитопроводе якоря; — механические потери.
Потери мощности не зависят, и мало зависят от нагрузки двигателя.
Двигатели рассчитываются таким образом, чтобы максимальное значение КПД было в области, близкой к номинальной мощности. Эксплуатация двигателей при малых нагрузках нежелательна вследствие малых значений rя . Значения КПД двигателей с различными способами возбуждения и мощностью от 1 до 100 кВт при номинальной нагрузке разные и составляют в среднем 0,8.
6.Характеристики двигателей постоянного тока
6.1. Рабочие характеристики
Рабочими называются регулировочная, скоростная, моментная и к.п.д. характеристики.
Регулировочная характеристика представляет зависимость скорости вращения П от тока Iв возбуждения в случае, если ток Iа якоря и напряжение U сети остаются неизменными, т. е. n=f(Iв) при Ia=const и U=const.
До тех пор, пока сталь магнитопривода машины не насыщена, поток Ф изменяется пропорционально току возбуждения Iв. В этом случае регулировочная характеристика является гиперболической. По мере насыщения при больших токах Iв характеристика приближается к линейной (рис. 2). При малых значениях тока Iв скорость вращения резко возрастает. Поэтому при обрыве цепи возбуждения двигателя (Iв = 0) с параллельным возбуждением скорость его вращения достигает недопустимых пределов, как говорят: «Двигатель идет вразнос». Исключение могут составлять микродвигатели, которые имеют относительно большой момент М0 холостого хода.
Рис. 2. Регулировочная характеристика двигателя
В двигателях последовательного возбуждения Iв = Iа. При малых нагрузках ток якоря Iа мал и скорость вращения может быть слишком большой, поэтому пуск и работа при малых нагрузках недопустимы. Микродвигатели так же, как и. в предыдущем случае, могут составлять исключение.
Скоростные характеристики дают зависимость скорости вращения п от полезной мощности Р2 на валу двигателя в случае, если напряжение U сети и сопротивление rв регулировочного реостата цепи возбуждения остаются неизменными, т. е. n=f(P2), при U=const и rв = const.
Рис. 3. Скоростные характеристики
С возрастанием тока якоря при увеличении механической нагрузки двигателя параллельного возбуждения одновременно увеличивается падения напряжения в якоре и появляется реакция якоря, которая обычно действует размагничивающим образом. Первая причина стремится уменьшить скорость вращения двигателя, вторая — увеличить. Действие падения напряжения в якоре обычно оказывает большее влияние. Поэтому скоростная характеристика двигателя параллельного возбуждения имеет слегка падающий характер (кривая 1, рис. 3).
В двигателе последовательного возбуждения ток якоря является током возбуждения. В результате скоростная характеристика двигателя с последовательным возбуждением имеет характер, близкий к гиперболическому. При увеличении нагрузки по мере насыщения магнитной цепи характеристика приобретает более прямолинейный характер (кривая 3 на рис. 3).
В компаундном двигателе при согласном включении обмоток скоростная характеристика занимает промежуточное положение между характеристиками двигателя параллельного и последовательного возбуждения (кривая 2).
Моментные характеристики показывают, как изменяется момент М при изменении полезной мощности Р2 на валу двигателя, если напряжение U сети и сопротивление rв регулировочного реостата в цепи возбуждения остаются неизменными, т. е. М = f(P2), при U=const, rв=const.
Полезный момент на валу двигателя
Если скорость вращения двигателя параллельного возбуждения не изменялась бы с нагрузкой, то зависимость момента Ммех от полезной мощности графически представляла бы прямую линию, проходящую через начало координат. В действительности скорость вращения с увеличением нагрузки падает. Поэтому характеристика полезного момента несколько загибается кверху (кривая 2, рис. 4). При этом кривая электромагнитного момента М проходит выше кривой полезного момента Ммех на постоянную величину, равную моменту холостого хода М0 (кривая 1).
Рис. 4. Моментные характеристики
В двигателе последовательного возбуждения вид моментной характеристики приближается к параболическому, так как изменение момента от тока нагрузки происходит, по закону параболы, пока сталь не насыщена. По мере насыщения зависимость приобретает более прямолинейный характер (кривая 4). В компаундном двигателе моментная характеристика (кривая 3) занимает промежуточное положение между характеристиками двигателя параллельного и последовательного возбуждения.
Характеристика изменения коэффициента полезного действия.
Кривая зависимости к. п. д. от нагрузки имеет характерный для всех двигателей вид (рис 5). Кривая проходит через начало координат и быстро растет при увеличении полезной мощности до 1/4 номинальной. При мощности Р2, равной примерно 2/3 номинальной, к. п. д. обычно достигает максимального значения. При увеличении нагрузки до номинальной к. п. д. остается постоянным или незначительно падает.
http://electrikam.com/osnovnye-uravneniya-dvigatelya-postoyannogo-toka-dpt/
http://www.bestreferat.ru/referat-184375.html
| Название: Двигатели постоянного тока Раздел: Рефераты по физике Тип: реферат Добавлен 06:26:13 07 декабря 2010 Похожие работы Просмотров: 11306 Комментариев: 22 Оценило: 19 человек Средний балл: 4.3 Оценка: 4 Скачать |
Мощность и потери. Характер подводимой к машине мощности зависит от ее режима работы: у генераторов это механическая мощность P1 = k1Mn, у двигателей – электрическая мощность P1 =UI. Характер снимаемой с машины полезной мощности – противоположный: у генератора это электрическая мощность P2 = UI, у двигателя – механическая P2=k2Mn. В машине всегда есть мощность потерь ∆Р, которая складывается из мощности электрических потерь (потери в меди) ∆Рэл = RI2, идущих на нагрев обмоток, мощности магнитных потерь (потери в стали) ∆Рмаг, мощности механических потерь (потери на трение) ∆Рмех и мощности добавочных потерь ∆Рдоб ≈ 0,01 Рном, где Рном – номинальная мощность. Таким образом, ∆Р = ∆Рмех + ∆Рмаг + ∆Рэл +∆Рдоб и Р1 = Р2 + ∆Р.
КПД машины. КПД машины можно рассчитать по формуле η = P 2 / P1. При экспериментальном определении КПД проще и, главное, точнее измерять не механическую мощность, а электрическую, и рассчитывать потери. Поэтому для определения КПД генератора пользуются формулой
η = P2 / (P2 + ∆Р)
 и КПД двигателя
и КПД двигателя
η = (P1 — ∆Р) / Р1.
КПД машин постоянного тока растет с увеличением мощности машин. Так, у микромашин мощностью до 0,1 кВт он составляет всего 30 – 40 %, у машин мощностью 10 кВт – 83 % и у машин 1000 кВт — 96 %.
КПД меняется также в зависимости от нагрузки (рис. 1.15). Из графика следует, что при малых нагрузках КПД резко падает, поэтому недогруженную машину невыгодно эксплуатировать.
ПРАКТИЧЕСКАЯ РАБОТА №12
«Расчет параметров двигателей постоянного тока»
ЦЕЛЬ РАБОТЫ: рассчитать ток двигателя в
номинальном режиме, частоту вращения и ток в режиме холостого хода; потери и
КПД двигателя; механические и искусственные характеристики двигателя.
КРАТКИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ:
Коллекторные машины обладают
свойством обратимости, т. е.
они могут работать как в режиме генератора, так и в режиме двигателя. Поэтому если машину постоянного тока подключить к
источнику энергии постоянного
тока, то в обмотке возбуждения
и в обмотке якоря машины появятся токи. Взаимодействие
тока якоря с полем возбуждения создает на якоре электромагнитный момент М, который
является не тормозящим, как это имело место
в генераторе, а вращающим.
Под действием электромагнитного момента якоря машина начнет вращаться,
т. е. машина будет работать
в режиме двигателя, потребляя из сети электрическую энергию и преобразуя ее в механическую. В процессе работы двигателя его якорь
вращается в магнитном поле. В обмотке якоря индуцируется ЭДС ![]() , направление
, направление
которой можно определить по правилу
«правой руки». По своей природе она не
отличается от ЭДС, наводимой в обмотке якоря
генератора. В двигателе же ЭДС направлена против тока ![]() , и поэтому ее называют противоэлектродвижущей силой (противо-ЭДС) якоря.
, и поэтому ее называют противоэлектродвижущей силой (противо-ЭДС) якоря.
Для двигателя, работающего с постоянной частотой вращения,
![]() .
.
(12.1)
Из (29.1) следует, что
подведенное к двигателю напряжение
уравновешивается противо-ЭДС обмотки якоря и падением
напряжения в цепи якоря. На основании (29.1) ток якоря
![]() .
.
(12.2)
Умножив обе части уравнения (29.1) на ток якоря ![]() ,
,
получим уравнение мощности для цепи якоря:
![]() , (12.3)
, (12.3)
где ![]() — мощность в цепи
— мощность в цепи
обмотки якоря; ![]() — мощность электрических потерь в цепи якоря.
— мощность электрических потерь в цепи якоря.
Для выяснения сущности
выражения ![]() проделаем следующее преобразование:
проделаем следующее преобразование:
![]() , или
, или
![]() .
.
Но, ![]()
Тогда ![]() ,
,
(12.4)
где
![]() — угловая частота вращения якоря;
— угловая частота вращения якоря; ![]() — электромагнитная
— электромагнитная
мощность двигателя.
Следовательно, выражение ![]() представляет собой электромагнитную мощность двигателя.
представляет собой электромагнитную мощность двигателя.
Преобразовав выражение (12.3)
с учетом (12.4), получим
![]() .
.
Анализ этого уравнения
показывает, что с увеличением нагрузки на вал двигателя,
т. е. с увеличением электромагнитного момента
М, возрастает мощность в цепи обмотки якоря ![]() , т. е.
, т. е.
мощность на входе двигателя. Но так как напряжение, подводимое к двигателю, поддерживается неизменным ![]() , то увеличение нагрузки двигателя сопровождается ростом тока в
, то увеличение нагрузки двигателя сопровождается ростом тока в
обмотке якоря ![]() .
.
В зависимости от способа
возбуждения двигатели постоянного тока, так же как и генераторы, разделяют на
двигатели с возбуждением от постоянных магнитов (магнитоэлектрические) и с
электромагнитным возбуждением. Последние в соответствии со схемой включения обмотки возбуждения относительно
обмотки якоря подразделяют на двигатели параллельного (шунтовые),
последовательного (сериесные) и смешанного (компаундные) возбуждения.
В соответствии с формулой ЭДС
![]() частота вращения двигателя (об/мин)
частота вращения двигателя (об/мин) ![]() .
.
Подставив
значение ![]() из (12.1), получим (об/мин)
из (12.1), получим (об/мин) ![]() , (12.5)
, (12.5)
Частота вращения двигателя прямо пропорциональна напряжению
и обратно пропорциональна магнитному потоку возбуждения. Физически это объясняется тем, что повышение напряжения U или уменьшение потока Ф вызывает увеличение разности ![]() ; это,
; это,
в свою очередь, ведет к росту тока ![]() . Вследствие этого
. Вследствие этого
возросший ток повышает вращающий момент, и
если при этом нагрузочный момент остается неизменным, то частота вращения двигателя увеличивается.
Из (29.5) следует, что регулировать частоту вращения двигателя
можно изменением либо напряжения U, подводимого к двигателю, либо
основного магнитного потока Ф, либо электрического сопротивления
в цепи якоря ![]() .
.
Направление вращения якоря
зависит от направлений магнитного потока возбуждения Ф
и тока в обмотке якоря. Поэтому, изменив направление какой-либо из указанных
величин, можно изменить направление вращения якоря. Следует иметь в виду, что
переключение общих зажимов схемы у рубильника не дает изменения направления вращения якоря, так как при
этом одновременно изменяется направление тока и в обмотке якоря, и в
обмотке возбуждения.
Пусковой ток якоря при
полном сопротивлении пускового реостата
![]() . (12.7)
. (12.7)
С появлением тока в цепи
якоря ![]() возникает пусковой момент
возникает пусковой момент ![]() , под действием которого начинается
, под действием которого начинается
вращение якоря. По мере
нарастания частоты вращения увеличивается противо-ЭДС ![]() , что ведет к
, что ведет к
уменьшению пускового тока и пускового момента.
Схема включения в сеть
двигателя показана на рис.
29.3, а. Характерной особенностью параллельного возбуждения
является то, что ток в обмотке возбуждения (ОВ) не зависит от тока нагрузки (тока якоря). Реостат в цепи
возбуждения ![]() служит
служит
для регулирования тока в обмотке возбуждения и магнитного потока
главных полюсов.
Эксплуатационные свойства
двигателя определяются его рабочими
характеристиками, под которыми понимают зависимость
частоты вращения n, тока I, полезного момента M2, вращающего момента M от мощности на валу двигателя Р2 при ![]() и
и ![]() (рис.
(рис.
29.3, 6).
При включении стабилизирующей
обмотки согласованно с параллельной обмоткой возбуждения ее МДС
компенсирует размагничивающее
действие реакции якоря так, что поток Ф во всем
диапазоне нагрузок остается практически неизменным.
Изменение частоты вращения
двигателя при переходе от номинальной
нагрузки к х.х., выраженное в процентах, называют номинальным
изменением частоты вращения:
![]() ,
,
(29.8)
где ![]() —
—
частота вращения двигателя в режиме х.х.
Обычно для двигателей
параллельного возбуждения ![]() , поэтому характеристику частоты вращения
, поэтому характеристику частоты вращения
двигателя параллельного возбуждения называют жесткой.
Введение дополнительного
сопротивления в цепь якоря.
Дополнительное сопротивление
(реостат ![]() ) включают в цепь якоря аналогично пусковому реостату (ПР).
) включают в цепь якоря аналогично пусковому реостату (ПР).
Однако в отличие от последнего оно должно быть рассчитано
на продолжительное протекание тока.
При включении сопротивления ![]() в цепь якоря выражение частоты (29.5)
в цепь якоря выражение частоты (29.5)
принимает вид
![]() , (29.12)
, (29.12)
где ![]() — частота вращения в режиме х.х.;
— частота вращения в режиме х.х.;
![]() — изменение частоты
— изменение частоты
вращения, вызванное падением напряжения в цепи якоря.
Частоту вращения двигателей
последовательного возбуждения можно
регулировать изменением либо напряжения ![]() , либо
, либо
магнитного потока обмотки
возбуждения. В первом случае в цепь якоря последовательно включают регулировочный реостат ![]() (рис. 29.10, а). С увеличением
(рис. 29.10, а). С увеличением
сопротивления этого реостата уменьшаются напряжение на входе двигателя и
частота его вращения. Этот
метод регулирования применяют главным образом в двигателях небольшой мощности. В случае
значительной мощности двигателя этот способ неэкономичен из-за больших потерь энергии в ![]() . Кроме
. Кроме
того, реостат ![]() , рассчитываемый на
, рассчитываемый на
рабочий ток двигателя,
получается громоздким и дорогостоящим.
Регулировать частоту
вращения двигателя изменением магнитного потока можно тремя способами: шунтированием обмотки возбуждения реостатом ![]() , секционированием обмотки возбуждения и
, секционированием обмотки возбуждения и
шунтированием обмотки якоря реостатом ![]() . Включение
. Включение
реостата ![]() , шунтирующего обмотку возбуждения, а также уменьшение сопротивления этого
, шунтирующего обмотку возбуждения, а также уменьшение сопротивления этого
реостата ведет к снижению
тока возбуждения ![]() , а следовательно, к росту
, а следовательно, к росту
частоты вращения. Этот способ
экономичнее предыдущего (см. рис. 29.10, а),
применяется чаще и оценивается
коэффициентом регулирования ![]() . Обычно
. Обычно
сопротивление реостата ![]() принимается таким, чтобы
принимается таким, чтобы ![]() .
.
При секционировании обмотки
возбуждения отключение части витков обмотки сопровождается ростом частоты вращения. При шунтировании обмотки якоря реостатом увеличивается ток возбуждения ![]() , что вызывает уменьшение частоты вращения. Этот способ регулирования, хотя и обеспечивает глубокую регулировку, неэкономичен и применяется очень редко.
, что вызывает уменьшение частоты вращения. Этот способ регулирования, хотя и обеспечивает глубокую регулировку, неэкономичен и применяется очень редко.
Потери в машинах постоянного
тока. В машинах
постоянного тока, как и в других электрических машинах, имеют место магнитные, электрические и
механические потери (составляющие группу основных потерь)
и добавочные потери.
Магнитные потери ![]() происходят только в сердечнике якоря, так как только этот элемент
происходят только в сердечнике якоря, так как только этот элемент
магнитопровода машины постоянного тока подвергается перемагничиванию. Величина магнитных потерь, состоящих из потерь от гистерезиса и потерь от вихревых токов, зависит от частоты перемагничивания ![]() значений магнитной индукции в
значений магнитной индукции в
зубцах и спинке якоря, толщины листов электротехнической стали, ее
магнитных свойств и качества изоляции этих
листов в пакете якоря.
Электрические потери в
коллекторной машине постоянного тока
обусловлены нагревом обмоток и щеточного контакта. Потери в цепи возбуждения
определяются потерями в обмотке возбуждения и в реостате, включенном в цепь
возбуждения:
![]() (12.18)
(12.18)
Здесь ![]() — напряжение на зажимах цепи
— напряжение на зажимах цепи
возбуждения. Потери в
обмотках цепи якоря
![]() (12.19)
(12.19)
где сопротивление обмоток в цепи якоря ![]() , приведенное к расчетной рабочей температуре
, приведенное к расчетной рабочей температуре ![]() ,
,
определяется по (13.4) с учетом данных, приведенных в § 13.1 и § 8.4.
Электрические потери также
имеют место и в контакте щеток:
![]() (12.20)
(12.20)
где
![]() — переходное падение напряжения, В, на
— переходное падение напряжения, В, на
щетках обеих полярностей, принимаемое в
соответствии с маркой щеток.
Электрические потери в цепи
якоря и в щеточном контакте зависят от нагрузки машины,
поэтому эти потери называют переменными.
Механические потери. В машине
постоянного тока механические потери
складываются из потерь от трения щеток о коллектор
![]() (12.21)
(12.21)
трения в подшипниках ![]() и
и
на вентиляцию ![]()
![]() (12.22)
(12.22)
где ![]() — коэффициент трения
— коэффициент трения
щеток о коллектор ![]()
![]() — поверхность соприкосновения всех щеток
— поверхность соприкосновения всех щеток
с коллектором, м2; ![]() — удельное давление, Н/м2, щетки [для
— удельное давление, Н/м2, щетки [для
машин общего назначения ![]() =(2÷3)·104 Н/м2];
=(2÷3)·104 Н/м2];
окружная скорость коллектора
(м/с) диаметром ![]() (м)
(м)
![]() . (12.23)
. (12.23)
Механические и магнитные потери при стабильной частоте вращения ![]() можно
можно
считать постоянными.
Сумма магнитных и
механических потерь составляют потери х.х.:
![]() .
.
(12.24)
Если машина работает в качестве двигателя параллельного
возбуждения в режиме х.х., то она потребляет из сети мощность
![]() . (12.25)
. (12.25)
Однако ввиду небольшого
значения тока ![]() электрические потери
электрические потери ![]() и
и ![]() весьма малы и обычно не превышают 3% потерь
весьма малы и обычно не превышают 3% потерь ![]() .
.
Поэтому, не допуская заметной ошибки, можно записать ![]() , откуда потери х.х.
, откуда потери х.х.
![]() . (12.26)
. (12.26)
Таким образом, потери х.х.
(магнитные и механические) могут быть определены экспериментально.
В машинах постоянного тока
имеется ряд трудно учитываемых
потерь — добавочных. Эти потери складываются из потерь от вихревых токов
в меди обмоток, потерь в уравнительных соединениях, в стали якоря из-за неравномерного
распределения индукции при
нагрузке, в полюсных наконечниках, обусловленных пульсацией основного потока из-за наличия зубцов якоря,
и др. Добавочные потери
составляют хотя и небольшую, но не поддающуюся точному учету величину. Поэтому, согласно ГОСТу, в
машинах без компенсационной обмотки значение добавочных
потерь ![]() принимают равным 1% от полезной мощности для генераторов или 1% от подводимой мощности для двигателей. В
принимают равным 1% от полезной мощности для генераторов или 1% от подводимой мощности для двигателей. В
машинах с компенсационной
обмоткой значение добавочных потерь принимают равным соответственно
0,5%.
Мощность (Вт) на входе
машины постоянного тока (подводимая мощность):
для генератора (механическая
мощность)
![]() (12.27)
(12.27)
где ![]() — вращающий
— вращающий
момент приводного двигателя, Н∙м;
для двигателя (электрическая
мощность)
![]() .
.
(12.28)
Мощность (Вт) на выходе
машины (полезная мощность):
для генератора (электрическая
мощность)
![]() ;
;
(12.29)
для двигателя (механическая
мощность)
![]() . (12.30)
. (12.30)
Здесь ![]() и
и ![]() —
—
момент на валу электрической машины, Н-м; ![]() — частота вращения, об/мин.
— частота вращения, об/мин.
Коэффициент полезного
действия. Коэффициент
полезного действия
электрической машины представляет собой отношение мощностей отдаваемой (полезной) ![]() к подводимой (потребляемой)
к подводимой (потребляемой) ![]() ,:
,:
![]() .
.
Определив суммарную мощность
вышеперечисленных потерь
![]() , (12.31)
, (12.31)
можно подсчитать КПД машины по одной из следующих
формул:
для генератора
![]() ; (12.32)
; (12.32)
для двигателя
![]() . (12.33)
. (12.33)
Обычно КПД машин постоянного
тока составляет 0,75—0,90 для
машин мощностью от 1 до 100 кВт и 0,90—0,97 для машин мощностью свыше 100 кВт. Намного меньше КПД машин
постоянного тока малой
мощности. Например, для машин мощностью от 5 до 50 Вт ![]() = 0,15÷0,50. Указанные значения
= 0,15÷0,50. Указанные значения
КПД соответствуют
номинальной нагрузке машины. Зависимость КПД машины постоянного тока от нагрузки выражается графиком
![]() , форма которого характерна для электрических машин.
, форма которого характерна для электрических машин.
Коэффициент полезного
действия электрической машины можно
определять: а) методом непосредственной нагрузки по результатам
измерений подведенной ![]() и отдаваемой
и отдаваемой ![]() мощностей; б) косвенным методом по
мощностей; б) косвенным методом по
результатам измерений потерь.
Метод непосредственной
нагрузки применим только для машин малой мощности, для остальных случаев применяется косвенный метод, как более точный и удобный. Установлено, что при ![]() >
>
80 % измерять КПД методом непосредственной
нагрузки нецелесообразно, так как он
дает большую ошибку, чем косвенный метод.
Существует несколько косвенных способов определения КПД. Наиболее прост способ холостого хода двигателя, когда потребляемая
машиной постоянного тока
мощность затрачивается только
на потери х.х. Что же касается
электрических потерь, то их определяют расчетным путем
после предварительного измерения электрических сопротивлений обмоток и приведения
их к рабочей температуре.
Пример 12.1. Двигатель постоянного тока
параллельного возбуждения
включен в сеть с напряжением 220 В. При номинальной нагрузке и частоте вращения ![]() об/мин
об/мин
он потребляет ток ![]() = 43 А. Определить КПД
= 43 А. Определить КПД
двигателя при номинальной нагрузке, если ток х.х. ![]() = 4 А,
= 4 А,
а сопротивления цепей якоря ![]() = 0,25 Ом и возбуждения
= 0,25 Ом и возбуждения ![]() = 150 Ом. При каком добавочном сопротивлении
= 150 Ом. При каком добавочном сопротивлении ![]() ,
,
включенном последовательно в цепь якоря, частота вращения двигателя будет ![]() = 1000
= 1000
об/мин (нагрузочный момент ![]() )?
)?
Решение. Ток возбуждения ![]() =
=
220/150 =1,47 А. Ток якоря в режиме х.х. ![]() = 4 — 1,47 = 2,53 А. Ток якоря
= 4 — 1,47 = 2,53 А. Ток якоря
номинальный ![]() = 43 — 1,47 = 41,53 А. Сумма магнитных и
= 43 — 1,47 = 41,53 А. Сумма магнитных и
механических потерь ![]() = 220- 2,53 -2,532—
= 220- 2,53 -2,532—
0,25 = 555 Вт. Электрические потери в цепи возбуждения по (12.18)
![]() Вт.
Вт.
Электрические потери в цепи
якоря по (12.19)
![]() Вт.
Вт.
Электрические потери в
щеточном контакте по (12.20)
![]() Вт.
Вт.
Подводимая к двигателю
мощность по (12.28)
![]() Вт.
Вт.
Добавочные потери
![]() Вт.
Вт.
Суммарные потери по (12.31)
![]() Вт.
Вт.
Полезная мощность двигателя
![]() Вт.
Вт.
КПД двигателя при номинальной
нагрузке
![]() .
.
Из выражения (29.5) получим
![]()
ЭДС якоря при частоте вращения 1000 об/мин по (12.20)
![]() В.
В.
Так как ток якоря прямо
пропорционален моменту ![]() , то при
, то при ![]() сила тока
сила тока ![]() после включения
после включения ![]() останется
останется
прежней ![]() А. Из выражения тока якоря (12.2) получим
А. Из выражения тока якоря (12.2) получим
![]() Ом.
Ом.
Электрические потери в
добавочном сопротивлении
![]() Вт.
Вт.
Полезная мощность двигателя при частоте вращения 1000
об/мин
![]() Вт.
Вт.
Расчет полезной мощности ![]() является приближенным, так как он
является приближенным, так как он
не учитывает уменьшение
механических потерь двигателя при его переходе на меньшую частоту
вращения.
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ:
1.
Решить
задачу №1. Двигатель постоянного тока параллельного возбуждения имеет
следующие данные: номинальная мощность Рном, напряжение питания Uном,
номинальная частота вращения nном,
сопротивление обмоток в цепи якоря Σr,
сопротивление цепи возбуждения rв, падение
напряжения в щеточном контакте щеток ∆Uщ
= 2 В. Значения перечисленных
параметров приведены в табл. 12.1. Требуется определить потребляемый двигателем
ток в режиме номинальной нагрузки Iном,
сопротивление пускового реостата Rп.р., при
котором начальный пусковой ток в цепи якоря двигателя был бы равен 2,5 Iаном,
начальный пусковой момент Мп, частоту вращения n0
и
ток I0 в режиме
холостого хода, номинальное изменение частоты вращения якоря двигателя при
сбросе нагрузки. Влиянием реакции якоря пренебречь.
Таблица 12.3.
|
Параметр |
Варианты |
||||
|
1 |
2 |
3 |
4 |
5 |
|
|
Рном ,кВт |
25 |
15 |
45 |
4,2 |
18 |
|
Uном , В |
440 |
220 |
440 |
220 |
220 |
|
nном , об/мин |
1500 |
1000 |
1500 |
1500 |
1200 |
|
ηном, |
85 |
83,8 |
88 |
78 |
84 |
|
Σr, Ом |
0,15 |
0,12 |
0,13 |
0,15 |
0,12 |
|
rв |
88 |
73 |
88 |
64 |
73 |
Решение:
—
определить
потребляемую двигателем мощность при номинальной нагрузке Р1ном;
—
определить
ток, потребляемый двигателем при номинальной нагрузке Iном;
—
определить
ток в цепи обмотки возбуждения Iв;
—
определить
ток в обмотке якоря Iаном;
—
определить
начальный пусковой ток якоря при заданной кратности 2,5 Iп.р.;
—
определить
требуемое сопротивление цепи якоря при заданной кратности пускового тока 2,5 Rа= Rп.р.+
Σr= Uном/ Iап;
—
определить
сопротивление пускового реостата Rп.р.;
—
определить
ЭДС якоря в режиме номинальной нагрузки Iаном, используя
уравнение напряжений;
—
определить
отношение коэффициентов сM/ce=[pN/2πɑ]/ [pN/(60ɑ)];
—
определить
начальный пусковой момент при заданной кратности пускового тока 2,5
—
Мп= сMФ Iап;
—
определить
момент на валу двигателя при номинальной нагрузке М2ном;
—
определить
электромагнитную мощность при номинальной нагрузке Рэм.ном;
—
определить
электромагнитный момент при номинальной нагрузке Мном;
—
определить
момент холостого хода М0
=
Мном — М2ном;
—
определить
ток якоря в режиме холостого хода Iаном= М0/( сMФ);
—
определить
ЭДС якоря в режиме холостого хода Ea,
используя уравнение напряжений (принимаем ∆Uщ
= 0);
—
определить
частоту вращения якоря в режиме холостого хода n0=
Ea0/( сеФ);
—
определить
номинальное изменение частоты вращения двигателя при сбросе нагрузки ![]() .
.
2. Решить
задачу №2. В табл. 12.1 даны значения параметров двигателя постоянного тока
независимого возбуждения: номинальная мощность двигателя Рном,
напряжение питания цепи якоря Uном , напряжение
питания цепи возбуждения UB, частота
вращения якоря в номинальном режиме nном;
сопротивления цепи якоря Σr; и цепи возбуждения
rв,
приведенные к рабочей температуре, падение напряжения в щеточном контакте при
номинальном токе ∆Uщ
= 2 В, номинальное изменение
напряжения при сбросе нагрузки ![]() = 8,0 %, ток якоря в режиме
= 8,0 %, ток якоря в режиме
холостого хода I0. Требуется
определить все виды потерь и КПД двигателя.
Таблица 12.2.
|
Параметр |
Варианты |
|||||
|
1 |
2 |
3 |
4 |
5 |
6 |
|
|
Рном ,кВт |
25 |
40 |
53 |
75 |
16 |
11 |
|
Uном ,В |
440 |
440 |
440 |
440 |
220 |
220 |
|
UB ,В |
220 |
220 |
220 |
220 |
220 |
110 |
|
I0, А |
6,0 |
7,5 |
8,0 |
10,8 |
8,7 |
5,8 |
|
Σr , Ом |
0,30 |
0,17 |
0,12 |
0,70 |
0,18 |
0,27 |
|
rв , Ом |
60 |
55 |
42 |
40 |
60 |
27 |
|
nном, об/мин |
2200 |
1000 |
2360 |
3150 |
1500 |
800 |
Решение:
— определить частоту вращения в режиме холостого
хода n0;
— определить ЭДС якоря в режиме холостого
хода (падением напряжения в щеточном контакте пренебрегаем ввиду его
незначительной величины в режиме холостого хода) Еа0;
— определить момент в режиме холостого
хода М0;
— определить момент на валу двигателя в
режиме номинальной нагрузки М2ном;
— определить электромагнитный момент
двигателя при номинальной нагрузке Мном;
— определить электромагнитная мощность
двигателя в режиме номинальной нагрузки Рэм.ном;
— определить тока якоря в режиме
номинальной нагрузки через ЭДС якоря в режиме холостого хода можно представить
как ![]() , сM/ce=9,55;
, сM/ce=9,55;
— определить сумму магнитных и
механических потерь двигателя, которая пропорциональна моменту холостого хода 0,105
М0n0;
— определить электрические потери в цепи
обмотки якоря Ра.э;
— определить электрические потери в
щеточном контакте якоря Рщ.э;
— определить мощность, подводимая к цепи
якоря, в номинальном режиме Р1аном;
— определить ток в обмотке возбуждения Iв;
— определить мощность в цепи возбуждения Рв;
— определить мощность, потребляемую
двигателем в режиме номинальной нагрузки Р1ном;
—
определить КПД двигателя в номинальном режиме ηном.
3. Решить
задачу №3. В табл. 12.3 приведены данные каталога на двигатели постоянного
тока независимого возбуждения серии 2П: номинальная мощность РНом,
номинальное
напряжение, подводимое к цепи якоря, Uном, номинальная
частота вращения nном, КПД
двигателя ηном,
сопротивление цепи якоря, приведенное к рабочей температуре Σr. Требуется определить сопротивление
добавочного резистора гд, который следует включить в цепь якоря,
чтобы при номинальной нагрузке двигателя частота вращения якоря составила 0,5п1ном;
построить естественную и искусственную механические характеристики двигателя.
Таблица
12.3.
|
Тип |
Рном ,кВт |
Uном,В |
nном |
ηном |
Σr , Ом |
|
2ITO200L |
7Д |
220 |
750 |
83,5 |
0,48 |
|
2П0200М |
20 |
440 |
2200 |
90 |
0,28 |
|
2ПФ200М |
30 |
440 |
2200 |
90 |
0,22 |
|
2ПФ200Ц |
20 |
220 |
1000 |
85,5 |
0,18 |
|
2ПН225М |
37 |
220 |
1500 |
86,5 |
0,07 |
|
2ПФ225М |
10 |
220 |
500 |
74,5 |
0,58 |
|
2ПО180М |
17 |
440 |
3000 |
90 |
0,31 |
Решение.
— определить ток в цепи якоря в режиме
номинальной нагрузки при пном== 750
об/мин I aном;
— определить ЭДС в режиме номинальной
нагрузки (падением напряжения в щеточном контакте пренебрегаем) Еном
;
— определить частоту вращения идеального
холостого хода (пограничная частота вращения) nоо ; — —
определить номинальный момент на валу двигателя М2ном;
— по полученным данным построить
естественную механическую характеристику (рис. 12.1, график 1);
— определить частоту вращения при включении
резистора п’ном = 0,5
пном;
— по вычисленным данным построить
искусственную механическую характеристику двигателя (рис. 12.1, график 2);
 — определить
— определить
сопротивление резистора rД.
4.
Оформить отчет по практической работе.
5.
Ответить на контрольные вопросы.
6.
Сделать вывод о проделанной работе.
Рисунок 12.1.Механические характеристики
двигателя постоянного тока
КОНТРОЛЬНЫЕ ВОПРОСЫ:
1. Каким свойством обладают коллекторные машины?
2. Охарактеризуйте вращающий момент. Где он возникает?
3. Почему в двигателе постоянного тока ЭДС
называется противоэлектродвижущей силой (противо-ЭДС) якоря?
4. Что является рабочими характеристиками
двигателя?
5. Как можно регулировать частоту вращения двигателей
последовательного возбуждения?
6. От чего зависит направление вращения
якоря?
7. Виды потерь двигателя постоянного тока и
их характеристики.