Координаты и преобразования координат в линейном пространстве
Координаты векторов в данном базисе линейного пространства
Пусть — базис линейного пространства
. Каждый вектор
можно разложить по базису (см. теорему 8.1), т.е. представить в виде
, причем коэффициенты
в разложении определяются однозначно. Эти коэффициенты
называются координатами вектора
в базисе
(или относительно базиса
). Координаты
вектора
— это упорядоченный на бор чисел, который представляется в виде матрицы-столбца
и называется координатным столбцом вектора
(в данном базисе). Вектор и его координатный столбец обозначаются одной и той же буквой полужирной или светлой соответственно.
Если базис (как упорядоченный набор векторов) представить в виде символической матрицы-строки , то разложение вектора
по базису
можно записать следующим образом:
(8.6)
Здесь умножение символической матрицы-строки на числовую матрицу-столбец
производится по правилам умножения матриц.
При необходимости, если речь идет о разных базисах, у координатного столбца указывается обозначение базиса, относительно которого получены координаты, например, — координатный столбец вектора
в базисе
.
Из теоремы 8.1 следует, что равные векторы имеют равные соответствующие координаты (в одном и том же базисе), и наоборот, если координаты векторов (в одном и том же базисе) соответственно равны, то равны и сами векторы.
Линейные операции в координатной форме
Пусть — базис линейного пространства
, векторы
и
имеют в этом базисе координаты
и
соответственно, т.е.
(8.7)
Складывая эти равенства, получаем .
т.е. при сложении векторов их координаты складываются.
Умножая второе равенство в (8.7) на число , получаем
т.е. при умножении вектора на число все его координаты умножаются на это число.
Другими словами, сумма векторов имеет координаты
, а произведение
имеет координаты
. Разумеется, что все координаты получены в одном базисе
.
Замечания 8.5
1. Нетрудно показать, что координатный столбец линейной комбинации векторов
равен линейной комбинации
координатных столбцов
этих векторов.
2. Если система векторов линейно зависима (линейно независима), то их координатные столбцы, полученные относительно одного базиса, образуют линейно зависимую (соответственно, линейно независимую) систему. Это следует из равносильности равенств и
. Например, если в этих равенствах не все коэффициенты равны нулю, т.е. система векторов
и система
их координатных столбцов линейно зависимы одновременно.
3. Все свойства линейной зависимости и линейной независимости векторов переносятся без изменений на их координатные столбцы, полученные в одном и том же базисе. И наоборот, свойства для матриц-столбцов, переносятся на векторы, если матрицы-столбцы считать их координатными столбцами.
4. Выбрав в n-мерном вещественном линейном пространстве некоторый базис, можно установить взаимно однозначное соответствие: каждому вектору поставить в соответствие его координатный столбец (в вы бранном базисе), и наоборот, каждому координатному столбцу поставить в соответствие вектор. Другими словами, любой фиксированный базис n-мерного вещественного линейного пространства позволяет установить взаимно однозначное соответствие между всеми векторами вещественно го пространства
и всеми столбцами n-мерного арифметического пространства
. Это соответствие обозначается
. Для n-мерного комплексного линейного пространства
аналогичное взаимно однозначное соответствие устанавливается с пространством
.
Преобразование координат вектора при замене базиса
Пусть заданы два базиса пространства и
. Базис
будем условно называть «старым», а базис
— «новым». Пусть известны разложения каждого вектора нового базиса по старому базису:
(8.8)
Записывая по столбцам координаты векторов в базисе
, составляем матрицу:
(8.9)
Квадратная матрица , составленная из координатных столбцов векторов нового базиса
в старом базисе
, называется матрицей перехода от старого базиса к новому. При помощи матрицы перехода (8.9) формулы (8.8) можно записать в виде:
(8.10)
Умножение символической матрицы-строки на матрицу перехода
в (8.10) производится по правилам умножения матриц.
Пусть в базисе вектор
имеет координаты
, а в базисе
— координаты
, т.е.
или, короче,
Подставляя в правую часть последнего равенства выражение (8.10), получаем — два разложения вектора
в одном и том же базисе
. Коэффициенты этих разложений должны совпадать (по теореме 8.1), так как это координаты одного и того же вектора в одном базисе. Поэтому
(8.11)
Формула (8.11) устанавливает связь координат вектора в разных базисах: координатный столбец вектора в старом базисе получается в результате умножения матрицы перехода на координатный столбец вектора в новом базисе.
Пример 8.3. В пространстве многочленов степени не выше второй даны две системы многочленов:
Доказать, что каждая система является базисом пространства . Найти матрицу
перехода от базиса
к базису
. Определить координаты квадратного трехчлена
относительно базисов
и
.
Решение. Система многочленов является стандартным базисом пространства
. Докажем, что система
является базисом. По ступим следующим образом. Найдем координатные столбцы
этих многочленов в стандартном базисе. Раскладывая по базису
, получаем
Составим из этих столбцов матрицу . Ранг этой матрицы равен 3, так как
. Следовательно, столбцы
линейно независимы, тогда и многочлены
линейно независимы (см. пункт 2 замечаний 8.5). Итак, многочлены
являются базисом пространства
, а матрица
— искомая матрица перехода от базиса
к базису
. Осталось найти координаты многочлена
в этих базисах. Раскладывая
по базисам, находим
Проверим результат, вычисляя по формуле (8.11):
Результаты совпадают.
Свойства матрицы перехода от одного базиса к другому
1. Пусть имеются три базиса пространства
и известны матрицы перехода:
от базиса
к базису
;
от
к
;
от
к
. Тогда
(8.12)
Действительно, запишем связь (8.10) для данных базисов:
Подставляя первое выражение во второе равенство, получаем . Сравнивая с третьим равенством, приходим к (8.12).
2. Если — матрица перехода от базиса
к базису
, то матрица
обратима и обратная матрица
является матрицей перехода от базиса
к базису
. Координаты вектора
в базисах
и
связаны формулами:
В самом деле, пусть — матрица перехода от базиса
к базису
. Учитывая, что матрица перехода от базиса
к базису
— единичная, применяем свойство 1 к трем базисам
. Для трех базисов
аналогично получаем:
. Следовательно,
.
3. Всякая обратимая квадратная матрица n-го порядка может служить матрицей перехода от одного базиса n-мерного линейного пространства к другому базису.
Пример 8.4. В двумерном арифметическом пространстве даны два базиса:
и
. Найти матрицу
перехода от базиса
к базису
и координаты вектора
в каждом из базисов.
Решение. Рассмотрим стандартный базис пространства
. Находим координаты векторов
в стандартном базисе. Раскладываем вектор
В стандартном базисе пространства
координатный столбец
совпадает с вектором
. Для других векторов аналогично получаем
. Из координатных столбцов составим матрицы перехода (8.9) от стандартного базиса
к данным базисам
и
По свойству 1 матриц перехода имеем . .По свойству 2:
. Поэтому
В стандартном базисе пространства
координатный столбец
совпадает с вектором
. Найдем координаты этого вектора в базисе
(по свойству 2 матрицы перехода):
В самом деле, справедливо разложение
Найдем координаты вектора в базисе
двумя способами
Полученный результат подтверждает разложение:
Математический форум (помощь с решением задач, обсуждение вопросов по математике).
Если заметили ошибку, опечатку или есть предложения, напишите в комментариях.
Теорема доказана.
Теорема о разности векторов: Координаты разности векторов равны разности соответствующих координат этих векторов.
Доказательство.
Докажем теорему для двух векторов. Теорема для большего количества векторов доказывается аналогично. Пусть $overrightarrow=left$, $overrightarrow=$, тогда
Теорема доказана.
Теорема о произведении вектора на число: Координаты произведения вектора на число равны произведению соответствующих координат это число.
Доказательство.
Теорема доказана.
Пример задачи на нахождение координат вектора
Решение.
Получи деньги за свои студенческие работы
Курсовые, рефераты или другие работы
Автор этой статьи Дата последнего обновления статьи: 05 04 2022
Координаты вектора в декартовой системе координат (ДСК)
Для начала дадим определение координат вектора в заданной системе координат. Чтобы ввести данное понятие, определим что мы называем прямоугольной или декартовой системой координат.
Прямоугольная система координат представляет из себя прямолинейную систему координат с взаимно перпендикулярными осями на плоскости или в пространстве.
С помощью введения прямоугольной системы координат на плоскости или в трехмерном пространстве становится возможным описывание геометрических фигур вместе с их свойствами при помощи уравнений и неравенств, то есть использовать алгебраические методы при решении геометрических задач.
Тем самым, мы можем привязать к заданной системе координат векторы. Это значительно расширит наши возможности при решении определенных задач
Прямоугольная система координат на плоскости обычно обозначается O x y , где O x и O y – оси коорднат. Ось O x называют осью абсцисс, а ось O y – осью ординат (в пространстве появляется ещё одна ось O z , которая перпендикулярна и O x и O y ).
Итак, нам дана прямоугольная декартова система координат O x y на плоскости если мы отложим от начала координат векторы i → и j → , направление которых соответственно совпадет с положительными направлениями осей O x и O y , и их длина будет равна условной единице, мы получим координатные векторы. То есть в данном случае i → и j → являются координатными векторами.
Координатные векторы
Векторы i → и j → называются координатными векторами для заданной системы координат.
Откладываем от начала координат произвольный вектор a → . Опираясь на геометрическое определение операций над векторами, вектор a → может быть представлен в виде a → = a x · i → + a y · j → , где коэффициенты a x и a y — единственные в своем роде, их единственность достаточно просто доказать методом от противного.
Разложение вектора
Разложением вектора a → по координатным векторам i → и j → на плоскости называется представление вида a → = a x · i → + a y · j → .
Коэффициенты a x и a y называются координатами вектора в данной системе координат на плоскости.
Координаты вектора в данной системе координат принято записывать в круглых скобках, через запятую, при этом заданные координаты следует отделять от обозначения вектора знаком равенства. К примеру, запись a → = ( 2 ; — 3 ) означает, что вектор a → имеет координаты ( 2 ; — 3 ) в данной системе координат и может быть представлен в виде разложения по координатным векторам i → и j → как a → = 2 · i → — 3 · j → .
Следует обратить внимание, что порядок записи координат, имеет важное значение, если вы запишите координаты вектора в другом порядке, вы получите совершенно другой вектор.
Опираясь на определения координат вектора и их разложения становится очевидным, что единичные векторы i → и j → имеют координаты ( 1 ; 0 ) и ( 0 ; 1 ) соответственно, и они могут быть представлены в виде следующих разложений i → = 1 · i → + 0 · j → ; j → = 0 · i → + 1 · j → .
Также имеет место быть нулевой вектор 0 → с координатами ( 0 ; 0 ) и разложением 0 → = 0 · i → + 0 · j → .
Равные и противоположные векторы
Векторы a → и b → равны тогда, когда их соответствующие координаты равны.
Противоположным вектором называется вектор противоположный данному.
Отсюда следует, что координаты такого вектора будут противоположны координатам данного вектора, то есть, — a → = ( — a x ; — a y ) .
Все вышеизложенное можно аналогично определить и для прямоугольной системы координат, заданной в трехмерном пространстве. В такой системе координат имеет место быть тройка координатных векторов i → , j → , k → , а произвольный вектор a → раскладывается не по двум, а уже по трем координатам, причем единственным образом и имеет вид a → = a x · i → + a y · j → + a z · k → , а коэффициенты этого разложения ( a x ; a y ; a z ) называются координатами вектора в данной (трехмерной) системе координат.
Следовательно, координатные векторы в трехмерном пространстве принимают также значение 1 и имеют координаты i → = ( 1 ; 0 ; 0 ) , j → = ( 0 ; 1 ; 0 ) , k → = ( 0 ; 0 ; 1 ) , координаты нулевого вектора также равны нулю 0 → = ( 0 ; 0 ; 0 ) , и в таком случае два вектора будут считаться равными, если все три соответствующие координаты векторов между собой равны a → = b → ⇔ a x = b x , a y = b y , a z = b z , и координаты противоположного вектора a → противоположны соответствующим координатам вектора a → , то есть, — a → = ( — a x ; — a y ; — a z ) .
Координаты радиус-вектора точки
Чтобы ввести данное определение, требуется показать в данной системе координат связь координат точки и координат вектора.
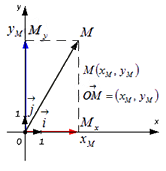
Пусть нам дана некоторая прямоугольная декартова система координат O x y и на ней задана произвольная точка M с координатами M ( x M ; y M ) .
Вектор O M → называется радиус-вектором точки M .
Определим, какие координаты в данной системе координат имеет радиус-вектор точки
Вектор O M → имеет вид суммы O M → = O M x → + O M y → = x M · i → + y M · j → , где точки M x и M y это проекции точки М на координатные прямые Ox и Oy соответственно (данные рассуждения следуют из определения проекция точки на прямую), а i → и j → — координатные векторы, следовательно, вектор O M → имеет координаты ( x M ; y M ) в данной системе координат.
Иначе говоря, координаты радиус-вектора точки М равны соответствующим координатам точки М в прямоугольной декартовой системе координат.
Аналогично в трехмерном пространстве радиус-вектор точки M ( x M ; y M ; z M ) разлагается по координатным векторам как O M → = O M x → + O M y → + O M z → = x M · i → + y M · j → + z M · k → , следовательно, O M → = ( x M ; y M ; z M ) .
Координаты и преобразования координат в линейном пространстве
Координаты векторов в данном базисе линейного пространства
Пусть — базис линейного пространства . Каждый вектор можно разложить по базису (см. теорему 8.1), т.е. представить в виде , причем коэффициенты в разложении определяются однозначно. Эти коэффициенты называются координатами вектора в базисе (или относительно базиса ). Координаты вектора — это упорядоченный на бор чисел, который представляется в виде матрицы-столбца и называется координатным столбцом вектора (в данном базисе). Вектор и его координатный столбец обозначаются одной и той же буквой полужирной или светлой соответственно.
Если базис (как упорядоченный набор векторов) представить в виде символической матрицы-строки , то разложение вектора по базису можно записать следующим образом:
Здесь умножение символической матрицы-строки на числовую матрицу-столбец производится по правилам умножения матриц.
При необходимости, если речь идет о разных базисах, у координатного столбца указывается обозначение базиса, относительно которого получены координаты, например, — координатный столбец вектора в базисе .
Из теоремы 8.1 следует, что равные векторы имеют равные соответствующие координаты (в одном и том же базисе), и наоборот, если координаты векторов (в одном и том же базисе) соответственно равны, то равны и сами векторы .
Линейные операции в координатной форме
Пусть — базис линейного пространства , векторы и имеют в этом базисе координаты и соответственно, т.е.
Складывая эти равенства, получаем .
т.е. при сложении векторов их координаты складываются .
Умножая второе равенство в (8.7) на число , получаем
т.е. при умножении вектора на число все его координаты умножаются на это число .
Другими словами, сумма векторов имеет координаты , а произведение имеет координаты . Разумеется, что все координаты получены в одном базисе .
1. Нетрудно показать, что координатный столбец линейной комбинации векторов равен линейной комбинации координатных столбцов этих векторов.
2. Если система векторов линейно зависима (линейно независима), то их координатные столбцы, полученные относительно одного базиса, образуют линейно зависимую (соответственно, линейно независимую) систему. Это следует из равносильности равенств и . Например, если в этих равенствах не все коэффициенты равны нулю, т.е. система векторов и система их координатных столбцов линейно зависимы одновременно.
3. Все свойства линейной зависимости и линейной независимости векторов переносятся без изменений на их координатные столбцы, полученные в одном и том же базисе. И наоборот, свойства для матриц-столбцов, переносятся на векторы, если матрицы-столбцы считать их координатными столбцами.
4. Выбрав в n-мерном вещественном линейном пространстве некоторый базис, можно установить взаимно однозначное соответствие: каждому вектору поставить в соответствие его координатный столбец (в вы бранном базисе), и наоборот, каждому координатному столбцу поставить в соответствие вектор. Другими словами, любой фиксированный базис n-мерного вещественного линейного пространства позволяет установить взаимно однозначное соответствие между всеми векторами вещественно го пространства и всеми столбцами n-мерного арифметического пространства . Это соответствие обозначается . Для n-мерного комплексного линейного пространства аналогичное взаимно однозначное соответствие устанавливается с пространством .
Преобразование координат вектора при замене базиса
Пусть заданы два базиса пространства и . Базис будем условно называть «старым», а базис — «новым». Пусть известны разложения каждого вектора нового базиса по старому базису:
Записывая по столбцам координаты векторов в базисе , составляем матрицу:
Квадратная матрица , составленная из координатных столбцов векторов нового базиса в старом базисе , называется матрицей перехода от старого базиса к новому. При помощи матрицы перехода (8.9) формулы (8.8) можно записать в виде:
Умножение символической матрицы-строки на матрицу перехода в (8.10) производится по правилам умножения матриц.
Пусть в базисе вектор имеет координаты , а в базисе — координаты , т.е.
Подставляя в правую часть последнего равенства выражение (8.10), получаем — два разложения вектора в одном и том же базисе . Коэффициенты этих разложений должны совпадать (по теореме 8.1), так как это координаты одного и того же вектора в одном базисе. Поэтому
Формула (8.11) устанавливает связь координат вектора в разных базисах: координатный столбец вектора в старом базисе получается в результате умножения матрицы перехода на координатный столбец вектора в новом базисе .
Пример 8.3. В пространстве многочленов степени не выше второй даны две системы многочленов:
Доказать, что каждая система является базисом пространства . Найти матрицу перехода от базиса к базису . Определить координаты квадратного трехчлена относительно базисов и .
Решение. Система многочленов является стандартным базисом пространства . Докажем, что система является базисом. По ступим следующим образом. Найдем координатные столбцы этих многочленов в стандартном базисе. Раскладывая по базису , получаем
Составим из этих столбцов матрицу . Ранг этой матрицы равен 3, так как . Следовательно, столбцы линейно независимы, тогда и многочлены линейно независимы (см. пункт 2 замечаний 8.5). Итак, многочлены являются базисом пространства , а матрица — искомая матрица перехода от базиса к базису . Осталось найти координаты многочлена в этих базисах. Раскладывая по базисам, находим
Проверим результат, вычисляя по формуле (8.11):
Свойства матрицы перехода от одного базиса к другому
1. Пусть имеются три базиса пространства и известны матрицы перехода: от базиса к базису ; от к ; от к . Тогда
Действительно, запишем связь (8.10) для данных базисов:
Подставляя первое выражение во второе равенство, получаем . Сравнивая с третьим равенством, приходим к (8.12).
2. Если — матрица перехода от базиса к базису , то матрица обратима и обратная матрица является матрицей перехода от базиса к базису . Координаты вектора в базисах и связаны формулами:
В самом деле, пусть — матрица перехода от базиса к базису . Учитывая, что матрица перехода от базиса к базису — единичная, применяем свойство 1 к трем базисам . Для трех базисов аналогично получаем: . Следовательно, .
3. Всякая обратимая квадратная матрица n-го порядка может служить матрицей перехода от одного базиса n-мерного линейного пространства к другому базису.
Пример 8.4. В двумерном арифметическом пространстве даны два базиса: и . Найти матрицу перехода от базиса к базису и координаты вектора в каждом из базисов.
Решение. Рассмотрим стандартный базис пространства . Находим координаты векторов в стандартном базисе. Раскладываем вектор
В стандартном базисе пространства координатный столбец совпадает с вектором . Для других векторов аналогично получаем . Из координатных столбцов составим матрицы перехода (8.9) от стандартного базиса к данным базисам и
По свойству 1 матриц перехода имеем . .По свойству 2: . Поэтому
В стандартном базисе пространства координатный столбец совпадает с вектором . Найдем координаты этого вектора в базисе (по свойству 2 матрицы перехода):
В самом деле, справедливо разложение
Найдем координаты вектора в базисе двумя способами
Полученный результат подтверждает разложение:
http://zaochnik.com/spravochnik/matematika/vektory/koordinaty-vektora-v-dsk/
http://mathhelpplanet.com/static.php?p=pryeobrazovaniya-koordinat-v-linyeinom-prostranstve
Вектор – это направленный прямолинейный отрезок, то есть отрезок, имеющий
определенную длину и определенное направление. Пусть точка А – начало вектора, а точка B – его конец, тогда вектор обозначается символом  или
или  . Вектор
. Вектор  называется противоположным
называется противоположным
вектору и может быть
обозначен  .
.
Сформулируем ряд базовых определений.
Длиной
или модулем
вектора называется
длина отрезка и обозначается  . Вектор нулевой длины (его суть — точка) называется нулевым
. Вектор нулевой длины (его суть — точка) называется нулевым  и направления
и направления
не имеет. Вектор  единичной длины, называется единичным. Единичный вектор,
единичной длины, называется единичным. Единичный вектор,
направление которого совпадает с направлением вектора , называется ортом вектора .
Векторы
называются коллинеарными, если они лежат на одной прямой или на
параллельных прямых, записывают . Коллинеарные векторы могут иметь совпадающие или
. Коллинеарные векторы могут иметь совпадающие или
противоположные направления. Нулевой вектор считают коллинеарным любому
вектору.
Векторы
называются равными  , если они коллинеарны, одинаково направлены и имеют
, если они коллинеарны, одинаково направлены и имеют
одинаковые длины.
Три вектора в пространстве называются компланарными,
если они лежат в одной плоскости или на параллельных плоскостях. Если среди
трех векторов хотя бы один нулевой или два любые коллинеарны, то такие векторы
компланарны.
Рассмотрим в
пространстве прямоугольную систему координат 0xyz. Выделим на осях координат 0x, 0y, 0z единичные векторы (орты) и
обозначим их через  соответственно.
соответственно.
Выберем произвольный вектор
пространства и совместим его начало с началом
координат. Спроектируем вектор
на координатные
оси и обозначим проекции через ax, ay, az
соответственно. Тогда нетрудно показать, что
 . (2.25)
. (2.25)
Эта
формула является основной в векторном исчислении и называется разложением
вектора по ортам координатных осей. Числа ax, ay, az называются координатами вектора . Таким образом, координаты вектора являются его
проекциями на оси координат. Векторное равенство (2.25) часто записывают в
виде
 . Мы будем использовать обозначение вектора в фигурных
. Мы будем использовать обозначение вектора в фигурных
скобках, чтобы визуально легче различать координаты вектора и координаты точки.
С использованием формулы длины отрезка, известной из школьной геометрии, можно
найти выражение для вычисления модуля вектора
:
 , (2.26)
, (2.26)
то
есть модуль вектора равен корню квадратному из суммы квадратов его координат.
Обозначим углы между вектором
и осями
координат через α, β, γ соответственно. Косинусы этих углов называются
для вектора направляющими, и для них выполняется соотношение: Верность данного равенства можно показать с помощью
Верность данного равенства можно показать с помощью
свойства проекции вектора на ось, которое будет рассмотрено в нижеследующем
пункте 4.
Пусть в трехмерном пространстве заданы векторы  своими
своими
координатами. Имеют место следующие
операции над ними: линейные (сложение, вычитание, умножение на число и
проектирование вектора на ось или другой вектор); не линейные – различные
произведения векторов (скалярное, векторное, смешанное).
1. Сложение двух векторов производится покоординатно, то
есть если
 .
.
Данная
формула имеет место для произвольного конечного числа слагаемых.
Геометрически
два вектора складываются по двум правилам:
а) правило треугольника –
результирующий вектор суммы двух векторов соединяет начало первого из них с
концом второго при условии, что начало второго совпадает с концом первого
вектора; для суммы векторов –
результирующий вектор суммы соединяет начало первого из них с концом последнего
вектора-слагаемого при условии, что начало последующего слагаемого совпадает с
концом предыдущего;
б)
правило
параллелограмма (для двух
векторов) – параллелограмм строится на векторах-слагаемых как на сторонах,
приведенных к одному началу; диагональ параллелограмма исходящая из их общего начала, является суммой
векторов.
2. Вычитание двух векторов производится
покоординатно, аналогично сложению, то есть если  , то
, то
 .
.
Геометрически два
вектора складываются по уже упомянутому правилу параллелограмма с учетом того, что разностью векторов
является диагональ, соединяющая концы векторов, причем результирующий вектор
направлен из конца вычитаемого в конец уменьшаемого вектора.
Важным следствием
вычитания векторов является тот факт, что если известны координаты начала и
конца вектора, то для вычисления координат вектора необходимо из координат его конца
вычесть координаты его начала. Действительно, любой вектор пространства может быть
представлен в виде разности двух векторов, исходящих из начала координат:  . Координаты векторов
. Координаты векторов и
и совпадают с
совпадают с
координатами точек А и В, так как начало координат О(0;0;0). Таким образом, по правилу
вычитания векторов следует произвести вычитание координат точки А из координат точки В.
3. Умножение вектора на число λ покоординатно: .
.
При λ>0
– вектор сонаправлен ; λ<0 – вектор противоположно направлен ; |λ|>1 – длина вектора увеличивается в λ раз; |λ|<1 – длина вектора уменьшается в λ раз.
сонаправлен ; λ<0 – вектор противоположно направлен ; |λ|>1 – длина вектора увеличивается в λ раз; |λ|<1 – длина вектора уменьшается в λ раз.
4. Пусть в пространстве задана
направленная прямая (ось l), вектор  задан
задан
координатами конца и начала. Обозначим проекции точек A и B на ось l
соответственно через A’ и B’.
Проекцией  вектора на ось l называется длина вектора
вектора на ось l называется длина вектора  , взятая со
, взятая со
знаком «+», если вектор и ось l сонаправлены, и со
знаком «–», если и l противоположно направлены.
Если
в качестве оси l взять некоторый другой вектор  , то получим проекцию вектора на вектор .
, то получим проекцию вектора на вектор .
Рассмотрим некоторые
основные свойства проекций:
1) проекция вектора на ось l равна произведению модуля
вектора на косинус угла
между вектором и осью, то есть  ;
;
2.) проекция вектора на ось
положительна (отрицательна), если вектор образует с осью острый (тупой) угол, и
равна нулю, если этот угол – прямой;
3) проекция суммы нескольких
векторов на одну и ту же ось равна сумме проекций на эту ось.
Сформулируем определения и
теоремы о произведениях векторов, представляющих нелинейные операции над
векторами.
5. Скалярным произведением  векторов и называется
векторов и называется
число (скаляр), равное произведению длин этих векторов на косинус угла φ между
ними, то есть
 . (2.27)
. (2.27)
Очевидно, что скалярный квадрат любого ненулевого вектора равен квадрату его длины, так как в этом случае угол  , поэтому его косинус (в 2.27) равен 1.
, поэтому его косинус (в 2.27) равен 1.
Теорема 2.2. Необходимым и достаточным условием
перпендикулярности двух векторов является равенство нулю их скалярного
произведения 
Следствие. Попарные скалярные произведения единичных орт равны нулю, то есть 
Теорема 2.3. Скалярное произведение двух векторов  ,
,
заданных своими координатами, равно сумме произведений их одноименных координат, то есть
 (2.28)
(2.28)
С помощью скалярного произведения векторов можно
вычислить угол между ними.
Если заданы два ненулевых вектора
своими координатами , то косинус угла φ между ними:
 (2.29)
(2.29)
Отсюда
следует условие перпендикулярности ненулевых векторов
и :
 (2.30)
(2.30)
Нахождение проекции вектора на направление,
заданное вектором , может осуществляться по формуле
 (2.31)
(2.31)
С помощью скалярного произведения векторов находят
работу постоянной силы  на
на
прямолинейном участке пути.
Предположим, что под действием постоянной силы материальная точка перемещается прямолинейно из
положения А в положение B. Вектор силы образует угол φ с вектором перемещения  (рис. 2.14). Физика утверждает, что работа силы при перемещении
(рис. 2.14). Физика утверждает, что работа силы при перемещении 
равна  .
.

Следовательно, работа постоянной силы
при прямолинейном перемещении точки ее приложения равна скалярному произведению
вектора силы на вектор перемещения.
Пример
2.9. С
помощью скалярного произведения векторов найти угол при вершине A параллелограмма ABCD, построенного на векторах 
Решение. Вычислим модули векторов и их скалярное произведение
по теореме (2.3):

Отсюда согласно формуле (2.29) получим косинус
искомого угла

Пример 2.10. Затраты сырьевых и материальных ресурсов, используемых
на производство одной тонны творога, заданы в таблице 2.2 (руб.).
Какова общая цена этих ресурсов, затрачиваемых на изготовление одной
тонны творога?
Таблица 2.2

Решение. Введем в рассмотрение два вектора: вектор затрат
ресурсов на тонну продукции  и вектор цены единицы
и вектор цены единицы
соответствующего ресурса  .
.
Тогда  . Общая цена
. Общая цена
ресурсов  , что представляет собой скалярное произведение
, что представляет собой скалярное произведение
векторов  . Вычислим его по формуле (2.28) согласно теореме 2.3:
. Вычислим его по формуле (2.28) согласно теореме 2.3:

Таким образом, общая цена затрат на производство одной
тонны творога составляет 279 541,5 рублей
Примечание. Действия с векторами, осуществленные в примере 2.10,
можно выполнить на персональном компьютере. Для нахождения скалярного
произведения векторов в MS Excel используют функцию СУММПРОИЗВ( ), где в качестве
аргументов указываются адреса диапазонов элементов матриц, сумму произведений
которых необходимо найти. В MathCAD
скалярное произведение двух векторов выполняется при помощи соответствующего
оператора панели инструментов Matrix
Пример 2.11. Вычислить работу, произведенную силой  , если точка ее приложения перемещается прямолинейно
, если точка ее приложения перемещается прямолинейно
из положения A(2;4;6) в положение A(4;2;7). Под каким углом к AB направлена сила ?
Решение. Находим вектор перемещения, вычитая из координат его конца координаты
начала
 . По формуле (2.28)
. По формуле (2.28)  (единиц работы).
(единиц работы).
Угол φ между и
находим по
формуле (2.29), то есть

6. Три некомпланарных вектора  , взятые в указанном порядке, образуют правую
, взятые в указанном порядке, образуют правую
тройку, если при наблюдении из конца третьего вектора  кратчайший
кратчайший
поворот от первого вектора ко второму
вектору совершается против часовой стрелки, и левую,
если по часовой стрелке.
Векторным
произведением  вектора на вектор называется
вектора на вектор называется
вектор , удовлетворяющий следующим условиям:
– перпендикулярен векторам и ;
– имеет длину, равную  , где φ – угол, образованный векторами
, где φ – угол, образованный векторами
и ;
– векторы образуют правую
тройку (рис. 2.15).
 Теорема 2.4. Необходимым и достаточным
Теорема 2.4. Необходимым и достаточным
условием коллинеарности двух векторов является равенство нулю их векторного
произведения
Теорема 2.5. Векторное произведение векторов  , заданных своими координатами, равно определителю
, заданных своими координатами, равно определителю
третьего порядка вида
 (2.32)
(2.32)
Примечание. Определитель (2.25)
раскладывается по свойству 7 определителей
Следствие 1. Необходимым и достаточным условием коллинеарности двух
векторов является пропорциональность их соответствующих координат
Следствие 2. Векторные произведения единичных орт равны 
Следствие 3. Векторный квадрат любого вектора равен нулю
Геометрическая
интерпретация векторного произведения состоит в том, что длина результирующего
вектора численно равна площади S
параллелограмма, построенного на векторах–сомножителях как на сторонах,
приведенных к одному началу. Действительно, согласно определению, модуль
векторного произведения векторов равен  . С другой стороны, площадь параллелограмма,
. С другой стороны, площадь параллелограмма,
построенного на векторах и , также равна 
. Следовательно,
 . (2.33)
. (2.33)

Также с помощью векторного произведения можно
определить момент силы относительно точки и линейную скорость вращения.
Пусть в точке A приложена
сила  и пусть O –
и пусть O –
некоторая точка пространства (рис. 2.16). Из курса физики известно, что моментом
силы относительно
точки O называется вектор  , который проходит через точку O и удовлетворяет следующим условиям:
, который проходит через точку O и удовлетворяет следующим условиям:
— перпендикулярен плоскости, проходящей через точки O, A, B;
— его модуль численно равен произведению силы на плечо  .
.
— образует правую тройку с векторами и .
Следовательно,
момент силы относительно
точки O представляет собой векторное произведение
 . (2.34)
. (2.34)

Линейная скорость  точки М твердого тела, вращающегося с
точки М твердого тела, вращающегося с
угловой скоростью  вокруг
вокруг
неподвижной оси, определяется формулой Эйлера  , O – некоторая неподвижная
, O – некоторая неподвижная
точка оси (рис. 2.17).
Пример 2.12. С помощью
векторного произведения найти площадь треугольника ABC, построенного на векторах
 , приведенных к одному началу.
, приведенных к одному началу.
Решение. Найдем векторное произведение заданных векторов по
формуле (2.32).

 . Согласно формуле (2.33) модуль векторного
. Согласно формуле (2.33) модуль векторного
произведения двух неколлинеарных векторов численно равен площади
параллелограмма, построенного на данных векторах как на сторонах, приведенных к
общему началу, то есть  . Тогда площадь треугольника
. Тогда площадь треугольника 
. Следовательно, искомая площадь равна  (единиц
(единиц
площади)
7. Рассмотрим произведение трех векторов , составленное следующим образом:  . Здесь первые два вектора перемножаются векторно, а
. Здесь первые два вектора перемножаются векторно, а
результирующий вектор – скалярно на третий. Такое произведение  называется смешанным
называется смешанным
произведением трех векторов
(векторно–скалярным произведением).
Теорема 2.6. Необходимым и достаточным условием компланарности
трех векторов является равенство нулю их смешанного произведения
Теорема 2.7. Если три вектора  заданы своими координатами, то их смешанное
заданы своими координатами, то их смешанное
произведение представляет собой определитель третьего порядка, составленный из
координат векторов- сомножителей соответственно, то есть
 (2.35)
(2.35)
Нетрудно показать, что объем параллелепипеда,
построенного на векторах как на
сторонах, приведенных к общему началу, численно равен модулю смешенного
произведения этих векторов  .
.
Объем треугольной пирамиды, построенной на этих же
векторах, равен
 (2.36)
(2.36)
Пример 2.13. Вершинами пирамиды служат точки  . Вычислить объем пирамиды.
. Вычислить объем пирамиды.
Решение. Найдем
координаты векторов
 . Вычислим смешанное произведение этих векторов:
. Вычислим смешанное произведение этих векторов: 
По формуле (2.36) объем пирамиды, построенной на
векторах  равен
равен
 (единиц объема)
(единиц объема)
Рассмотрим очень важный вопрос о
разложении вектора по базису. Приведем
следующие определения.
Система векторов  называется
называется
линейно зависимой, если существуют такие числа  , хотя бы одно из которых отлично от нуля, что имеет
, хотя бы одно из которых отлично от нуля, что имеет
место равенство
 (2.37)
(2.37)
Отсюда всегда можно один из линейно
зависимых векторов выразить через линейную комбинацию остальных. Действительно,
допустим для определенности, что  . Тогда на это число разделим равенство (2.37), имеем:
. Тогда на это число разделим равенство (2.37), имеем:

получим выражение вектора  через
через
остальные векторы 
Линейно независимыми называют векторы, если равенство
(2.37) выполняется только тогда, когда
все
 В системе векторов число линейно
В системе векторов число линейно
независимых векторов равняется рангу матрицы, которая составлена из координат
этих векторов (смотри раздел I.5).
Базисом n – мерного
пространства En называют любую совокупность линейно независимых векторов n – мерного пространства.
Произвольный вектор  n
n
– мерного пространства можно представить
в виде линейной комбинации векторов базиса
таким образом:

Числа
 называются координатами
называются координатами
вектора в базисе
векторов .
Линейное пространство называется
конечномерным и имеет размерность n, если в этом
пространстве существует система из n линейно независимых векторов (базис) такая,
что каждое ее расширение приводит к линейной зависимости системы.
Например, в трехмерном пространстве
существует базис единичных орт такой, что любое расширение этой системы
линейно независимых векторов, то есть каждый вектор трехмерного
пространства, приводит к линейной зависимости векторов (является линейной
комбинацией орт ): Коэффициенты {x1, x2, x3} такого разложения вектора
Коэффициенты {x1, x2, x3} такого разложения вектора
по ортам являются координатами вектора в трехмерном
пространстве.
Вопросы для самопроверки
Координаты векторов
Определение
18.4 Пусть
—
-мерное
линейное пространство, вещественное
или комплексное,
—
базис. Тогда произвольный вектор
из
представим
в виде линейной комбинации векторов
базиса:
![]()
Числа
![]()
называются
координатами вектора
в
базисе
.
Столбец

из
координат вектора называется координатным
столбцом вектора
.
Предложение
18.3 Координаты вектора
в заданном базисе определяются однозначно.
Доказательство.
Предположим противное. Пусть
—
базис, в котором у вектора
есть
два различных набора координат:
![]()
Тогда
![]()
то есть
![]()
Так как наборы координат различны, то
хотя бы один из коэффициентов справа
отличен от нуля. Следовательно, векторы
—
линейно зависимы, что противоречит
определению базиса. Полученное
противоречие означает, что предположение
о наличии двух различных наборов
координат неверно.
Предложение
18.4 Пусть в
-мерном
пространстве
задан
базис
.
Тогда координатный столбец суммы
векторов равен сумме координатных
столбцов слагаемых, координатный столбец
произведения вектора на число равен
координатному столбцу вектора, умноженному
на это число.
Доказательство.
Пусть векторы
и
имеют
координатные столбцы
и

соответственно.
Отсюда следует, что
![]()
Поэтому

Это равенство означает, что координатный
столбец вектора
![]()
имеет
вид
.
Первая часть предложения доказана.
Доказательство второй части предоставляем
читателю.
Из последнего
предложения следует, что как только в
-мерном
пространстве зафиксирован базис, каждый
вектор можно заменить его координатным
столбцом, и операциям сложения и умножения
на число соответствуют такие же операции
над их координатными столбцами. Таким
образом, каждое
-мерное
пространство является, с точки зрения
алгебры, копией пространства
в
вещественном случае, а в комплексном —
копией
.
Изменение
координат вектора при изменении базиса
Пусть в
-мерном
линейном пространстве
выбран
базис
,
который мы будем для удобства называть
«старый» и другой базис
![]()
,
который мы будем называть «новый».
Возьмем призвольный вектор
из
.
Его координатный столбец в старом базисе
обозначим
,
а в новом —
.
Нам нужно выяснить, как связаны друг с
другом координаты в старом и в новом
базисе. Для этого нам сначала нужно
«связать» друг с другом старый и
новый базисы. Запишем разложения новых
базисных векторов по старому базису
Составим матрицу, столбцами которой
служат координатные столбцы векторов
нового базиса
Эта матрица
называется матрицей перехода от
старого базиса к новому.
Замечание
18.1 Матрица перехода
всегда невырождена, то есть
![]()
.
Предложение
18.5 Координатные
столбцы в старом базисе и в новом базисе
связаны формулой
|
|
(18.1) |
где справа стоит произведение матрицы
перехода
![]()
на
матрицу-столбец.
Доказательство.
Так как
![]()
—
координатный столбец вектора
в
новом базисе, то

Заменив векторы
![]()
их
разложениями по старому базису, получим

В силу предложения
14.3 изменим порядок суммирования
Здесь мы получили разложение вектора
по
старому базису, причем координата
вектора с номером
![]()
равна

.
Элемент с номером
столбца
![]()
будет
иметь такой же вид. Следовательно,
формула (18.1)
доказана.
Пример 18.4
Пусть
![]()
,
то есть
—
трехмерное векторное пространство.
Пусть задан ортонормированный базис
i, j, k. Выберем другой (новый)
базис
![]()
Возьмем вектор
![]()
.
Найдем его координаты в новом базисе.
Выпишем матрицу
перехода, ее столбцы — это координаты
новых базисных векторов
Пусть
—
координатный столбец вектора
![]()
в
новом базисе. Тогда
|
|
(18.2) |
откуда
Найдем матрицу
![]()
по
формуле (14.14).
Находим определитель
Находим алгебраические дополнения
![]()
Следовательно,
Находим координаты вектора

Таким образом, новые координаты вектора
:
![]()
,
![]()
,
![]()
,
![]()
.
Тот же самый
результат можно было получить, записав
формулу (18.2)
в виде системы уравнений
Решив эту систему, например, методом
Гаусса, найдем новые координаты
![]()
,
![]()
,
![]()
.
Вперед:
Матрица
линейного преобразования
Наверх:
Линейные
преобразования
Назад:
Линейные
преобразования
Определение и
примеры
Рассмотрим линейное
пространство
и
преобразование
![]()
этого
пространства, то есть закон, по которому
каждому вектору
из
соответствует
вектор
![]()
из
того же пространства. Вектор
называется
образом
вектора
и
обозначается
![]()
,
а вектор
называется
прообразом
вектора
.
Определение
19.1
Преобразование
линейного
пространства
называется
линейным,
если для любых векторов
и
![]()
и
любого числа
![]()
выполнены
равенства
|
|
(19.1) |
то есть образ
суммы векторов равен сумме образов
слагаемых, образ вектора, умноженного
на число, равен произведению этого числа
на образ вектора.
Замечание
19.1 В этой
главе с каждым линейным преобразованием
будет связана матрица, которую мы будем
обозначать той же буквой, что и само
преобразование. Чтобы их различать, мы
для букв, обозначающих преобразование,
будем использовать так называемый
«каллиграфический» шрифт.
Линейное
преобразование пространства
называют
также линейным
отображением
из
в
или
линейным
оператором
из
в
.
Исходя из
равенств (19.1)
легко проверить, что
то есть образ
линейной комбинации векторов равен
линейной комбинации их образов.
Рассмотрим несколько
примеров линейных преобразований.
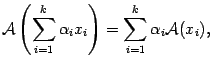
Пример
19.1 Пусть
—
двумерное векторное пространство, то
есть множество векторов плоскости.
Пусть
![]()
.
Это преобразование действует так: каждый
вектор оно переводит в вектор такого
же направления, но в два раза большей
длины. Если считать, что все векторы
имеют начало в начале координат, то
преобразование
можно
представить как растяжение плоскости
в два раза (рис. 19.1).
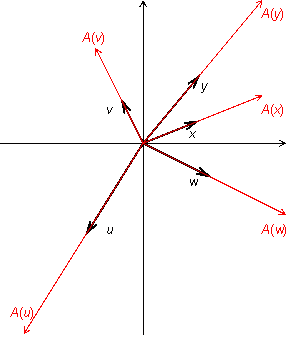
Рис.19.1.Преобразование растяжения
Проверим выполнение
равенств (19.1)
![]()
![]()
Равенства (19.1)
выполнены, следовательно, преобразование
является
линейным.
Пример
19.2 Пусть
—
двумерное векторное пространство,
—
поворот вектора по часовой стрелке на
угол
![]()
(рис.
19.2).
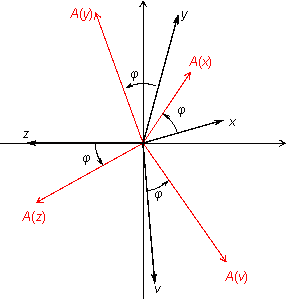
Рис.19.2.Преобразование поворота
Покажем, что это
— линейное преобразование.
Пусть
и
—
два вектора. Тогда
![]()
—
это диагональ параллелограмма со
стронами
,
(рис.
19.3).
Рис.19.3.Образ суммы векторов
Если параллелограмм
повернуть как единое целое на угол
,
то его стороны станут векторами
и
![]()
,
диагональ будет вектором
![]()
.
С другой стороны, диагональ тоже
повернулась на угол
и
поэтому является вектором
![]()
.
Следовательно,
![]()
,
первое из условий (19.1)
выполнено.
Пусть
—
число. Из рисунка 19.4 очевидно, что
![]()
.
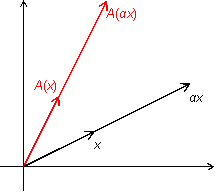
Рис.19.4.Образ вектора, умноженного на
число
Следовательно,
преобразование
—
линейное.
Упражнение19.1.1.
Пусть
—
двумерное векторное пространство,
![]()
—
некоторая прямая, проходящая через
начало координат,
—
преобразование, переводящее каждый
вектор
в
вектор
симметричный
исходному относительно прямой
(рис.
19.5). Другими словами,
является
зеркальным отражением вектора
в
прямой
.
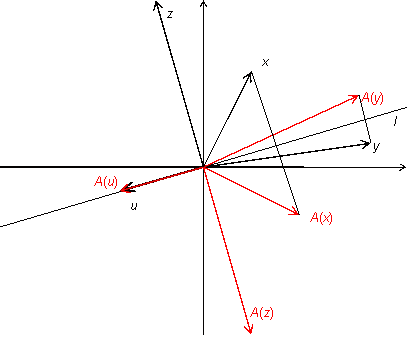
Рис.19.5.Преобразование отражения
Докажите, что
является
линейным преобразованием.
Упражнение19.1.2.
Пусть
—
двумерное векторное пространство,
—
некоторая прямая, проходящая через
начало координат,
—
преобразование, переводящее каждый
вектор
в
его проекцию на прямую
(рис.
19.6).
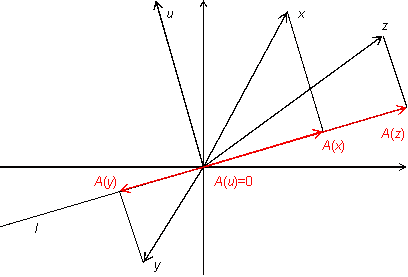
Рис.19.6.Преобразование проектирования
Докажите, что
является
линейным преобразованием.
Пример
19.3 Пусть
—
пространство всех многочленов,
—
преобразование, которое переводит
вектор из
,
то есть многочлен, в производную этого
многочлена, которая естественно является
многочленом, то есть вектором из
.
Пусть
![]()
,
то есть
![]()
.
Тогда
![]()
Например, если
![]()
,
то
![]()
.
Покажем, что преобразование
является
линейным.
Пусть
![]()
,
—
число. Тогда в силу свойства линейности
производной получим
![]()
Аналогично,
![]()
Следовательно,
—
линейное преобразование.
Пример
19.4 Пусть
—
-мерное
линейное пространство, Выберем в этом
пространстве базис
.
Тогда у любого вектора
есть
его координатный столбец

.
Пусть
—
квадратная матрица порядка
.
Определим преобразование
следующим
образом:
![]()
является
вектором, координатный столбец которого
равен
![]()
(справа
стоит произведение матрицы
на
столбец
).
Покажем, что преобразование
—
линейное.
Пусть
и
имеют
координатные столбцы
и
![]()
соответственно,
а их образы
и
—
координатные столбцы
,
и
![]()
.
Тогда
![]()
Но выражение в
последнем равенстве справа является
координатным столбцом образа суммы
векторов
.
Следовательно,
![]()
.
Пусть
![]()
—
произвольное число. Тогда координатный
столбец вектора
![]()
равен
![]()
,
координатный столбец образа вектора
![]()
то есть равен числу
,
умноженному на координатный столбец
образа вектора
.
Поэтому
![]()
.
Тем самым мы доказали, что преобразование
является
линейным.
Очевидно, что
примерами линейных преобразований
могут служить тождественное
преобразование,
то есть преобразование, переводящее
каждый вектор в себя,
![]()
,
и нулевое
преобразование,
переводящее каждый вектор в нуль,
![]()
.
Легко проверяется,
что для любого линейного преобразования
образ
нуля равен нулю,
![]()
.
Действительно, в силу второго из
равенств (19.1)
![]()
Вперед:
Матрица
линейного преобразования
Наверх:
Линейные
преобразования
Назад:
Линейные
преобразования
Вперед: Координаты
векторов Наверх: Линейные
пространства Назад:
Определение
и примеры
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Содержание:
- n-мерный вектор и векторное пространство
- Линейные (векторные) n — мерные пространства
- Линейные операции над n — измеримыми векторами
- Скалярное произведение двух векторов
- Линейная зависимость и независимость векторов
- Базис n -мерного пространства. Разложение вектора по базису
- Переход к новому базису. Нахождение базисных решений системы линейных алгебраических уравнений
- Однородная система уравнений. Особенности решения
n-мерный вектор и векторное пространство
Множество всех векторов, которые мы рассматривали на плоскости или в пространстве и для которых определены операции сложения векторов, умножение вектора на число являются простыми примерами векторного пространства.
Определение 1. Упорядоченное множество n действительных чисел, записанных в виде (a1, a2, a3, …, an) называется n- мерным вектором. Числа a1, a2, a3, …, an называются координатами вектора  , то есть = (a1, a2, a3, …, an).
, то есть = (a1, a2, a3, …, an).
Понятие n-мерного вектора широко используется в экономике, например, некоторый набор товаров можно охарактеризовать вектором = (a1, a2, a3, …, an), а соответственно цены — вектором  = (b1, b2, b3, …, bn).
= (b1, b2, b3, …, bn).
Если у n-мерного вектора одна координата равна единице, а все остальные равны нулю, то такой вектор называется единичным. Очевидно, что существует n различных единичных векторов

исходящих из начала координат — точки О. Все определения и действия для двумерных и трехмерных векторов, заданных в координатной форме, распространяются и на n-мерные векторы (n ≥ 4).
Два n-мерных вектора равны тогда и только тогда, когда их соответствующие компоненты равны.
Вектор = (a1, a2, a3, …, an) и вектор = (b1, b2, b3, …, bn) равны, когда ai = bi (i = 1, 2, 3, …, n).
Суммой двух n-мерных векторов  и
и  есть третий n-мерный вектор
есть третий n-мерный вектор  , координаты которого равны сумме соответствующих одноименных координат векторов и , то есть сi = ai + bi (i = 1, 2, 3, …, n).
, координаты которого равны сумме соответствующих одноименных координат векторов и , то есть сi = ai + bi (i = 1, 2, 3, …, n).
Произведением вектора на действительное число λ называется вектор  , координаты которого di равны произведению числа λ на соответствующие координаты вектора , то есть di = λai (i = 1, 2, 3, …, n).
, координаты которого di равны произведению числа λ на соответствующие координаты вектора , то есть di = λai (i = 1, 2, 3, …, n).
Вектор, у которого все координаты равны нулю, называется нулевым вектором и обозначается 
Операции над произвольными векторами удовлетворяют свойствам:
1.  — переместительный закон;
— переместительный закон;
2.  — сочетательный закон;
— сочетательный закон;
3.  — сочетательный закон, относительно числового множителя;
— сочетательный закон, относительно числового множителя;
4.  — распределительный закон относительно суммы векторов;
— распределительный закон относительно суммы векторов;
5.  — распределительный закон относительно суммы числовых множителей.
— распределительный закон относительно суммы числовых множителей.
6. Существует нулевой вектор  , такой, что
, такой, что  для произвольного вектора ;
для произвольного вектора ;
7. Для произвольного вектора  существует противоположный вектор
существует противоположный вектор  , такой, что
, такой, что

8.  , для любого вектора (особая роль числового множителя 1).
, для любого вектора (особая роль числового множителя 1).
Определение. Множество векторов с действительными координатами, в
котором определены операции сложения векторов и умножения вектора на число, удовлетворяющие выше приведенным восьми свойствам, называется векторным пространством.
Замечания. Если под векторами  и
и  можно рассматривать элементы произвольной природы, то соответствующее множество элементов называется линейным пространством.
можно рассматривать элементы произвольной природы, то соответствующее множество элементов называется линейным пространством.
Линейным пространством, например, множество всех алгебраических многочленов, степени которых не превышают натуральное число n. Если множество всех многочленов точно равно натуральному числу n, то не будет линейным пространством, потому что сумма двух многочленов может оказаться многочленом, степень которого меньше n.
Линейные (векторные) n — мерные пространства
Линейные  -мерные пространства: основные определения:
-мерные пространства: основные определения:
В школьном курсе математики понятие вектора обозначалось как направленный отрезок. Положение (расположение) вектора на прямой  плоскости
плоскости  или в пространстве
или в пространстве  описывалось соответственно одним, двумя, тремя числами — координатами вектора.
описывалось соответственно одним, двумя, тремя числами — координатами вектора.
Математический подход к изучению различных явлений (процессов) окружающего мира, в том, числе и экономических, требует обобщения понятия вектора, связано с увеличением количества его координат. Такое обобщение не подразумевает геометрической интерnретации, но является удобным для математического моделирования.
Вектором размерности  , или
, или  -мерных вектором
-мерных вектором  , называется совокупность
, называется совокупность  вещественных чисел
вещественных чисел  упорядоченных по номеру
упорядоченных по номеру  , а числа
, а числа — его координатами. Обозначают п-мерные векторы маленькой буквой латинского алфавита с значком вектора — чертой — сверху, или выделяют ее жирным шрифтом, а координаты вектора записывают в круглых скобках в столбец или в строку:
— его координатами. Обозначают п-мерные векторы маленькой буквой латинского алфавита с значком вектора — чертой — сверху, или выделяют ее жирным шрифтом, а координаты вектора записывают в круглых скобках в столбец или в строку:

Согласно определению  -измеримый вектор можно рассматривать как матрицу-столбец размера
-измеримый вектор можно рассматривать как матрицу-столбец размера  , или как матрицу-строку размера
, или как матрицу-строку размера  и, наоборот названные матрицы — рассматривать как векторы. Итак, для -мерных векторов остаются в силе введенные для матриц определения и действия над матрицами.
и, наоборот названные матрицы — рассматривать как векторы. Итак, для -мерных векторов остаются в силе введенные для матриц определения и действия над матрицами.
Нулевым вектором  , или ноль-вектором, называется -мерный вектор, все координаты которого равны нулю:
, или ноль-вектором, называется -мерный вектор, все координаты которого равны нулю:

Два вектора  и
и  одной размерности называются равными, если совпадают их координаты с одинаковыми индексами:
одной размерности называются равными, если совпадают их координаты с одинаковыми индексами:

Линейные операции над n — измеримыми векторами
1. Суммой -мерных векторов  и
и  называется вектор
называется вектор  той самой размерности, каждая координата которого определяется как сумма координат векторов-слагаемых, имеющих одинаковые индексы:
той самой размерности, каждая координата которого определяется как сумма координат векторов-слагаемых, имеющих одинаковые индексы:

Следовательно: 
Следствие. Для любого вектора  имеем:
имеем: 
2. Произведением вектора  со скаляром
со скаляром  называется вектор
называется вектор  , каждая координата которого является произведением координаты вектора
, каждая координата которого является произведением координаты вектора  с постоянной
с постоянной  :
:

Следствие. Если  и скаляр
и скаляр  Для любого вектора
Для любого вектора  и скаляра
и скаляра  имеем:
имеем: 
Векторы  и
и  называются противоположными друг другу, или взаимно противоположными, если иx соответствующие координаты отличаются множителем
называются противоположными друг другу, или взаимно противоположными, если иx соответствующие координаты отличаются множителем  , то есть
, то есть

Суммой взаимно противоположных векторов есть нулевой вектор той же размерности.
Разность векторов  и
и  рассматривают как сумму вектора
рассматривают как сумму вектора  и вектора
и вектора  , противоположного вектору
, противоположного вектору 

Векторы  называются коллинеарными, если для любого
называются коллинеарными, если для любого  выполняется равенство
выполняется равенство  . Согласно определению координаты коллинеарных векторов, имеют одинаковые индексы, пропорциональные:
. Согласно определению координаты коллинеарных векторов, имеют одинаковые индексы, пропорциональные:
 где
где  или
или 
Если  то геометрически это означает, что векторы лежат на одной
то геометрически это означает, что векторы лежат на одной
прямой или на параллельных прямых.
В частном случае, когда  , получаем равные векторы. Результатом выполнения линейных операций над
, получаем равные векторы. Результатом выполнения линейных операций над  -мерными векторами являются векторы той же размерности, что и выходные векторы. Как и действия над матрицами, линейные операции над векторами подчиняются ассоциативном (связующем), коммутативной (переставной) и дистрибутивному (распределительном) законам:
-мерными векторами являются векторы той же размерности, что и выходные векторы. Как и действия над матрицами, линейные операции над векторами подчиняются ассоциативном (связующем), коммутативной (переставной) и дистрибутивному (распределительном) законам:

где 
 -мерные векторы;
-мерные векторы;  — стали.
— стали.
Совокупность всех  -мерных векторов с действительными координатами, для которых определены линейные операции (4.3) — (4.4), называется
-мерных векторов с действительными координатами, для которых определены линейные операции (4.3) — (4.4), называется  -мерных (линейными) векторным пространством и обозначается
-мерных (линейными) векторным пространством и обозначается  .
.
Скалярное произведение двух векторов
Аналогично тому, как рассматривался произведение матриц вводят понятие скалярного произведения векторов  -мерного линейного пространства. Напомним, что условием существования произведения матриц является равенство количества столбцов первой матрицы и количества строк дpyгoй матрицы. Это требование выполняется, если рассматривать произведение вектора строки
-мерного линейного пространства. Напомним, что условием существования произведения матриц является равенство количества столбцов первой матрицы и количества строк дpyгoй матрицы. Это требование выполняется, если рассматривать произведение вектора строки  на вектор-столбец
на вектор-столбец  , принадлежащих пространству одной размерности.
, принадлежащих пространству одной размерности.
Скалярным произведением двух  -мерных векторов называется число, равное сумме произведений иx одинаковых по номеру координат, и обозначается символом
-мерных векторов называется число, равное сумме произведений иx одинаковых по номеру координат, и обозначается символом 

Действие умножения для получения скалярного произведения обозначают точкой между векторами: 
Произведение  называют скалярным квадратом вектора.
называют скалярным квадратом вектора.
На основе скалярного произведения приведем определение понятий, которые вводились для векторов размерностью  , а именно длина вектора и угол между двумя векторами.
, а именно длина вектора и угол между двумя векторами.
Длиной  или модулем,
или модулем,  -мерного вектора
-мерного вектора  называется арифметический квадратный корень из его скалярного квадрата:
называется арифметический квадратный корень из его скалярного квадрата:

то есть

Единичным  -мерным вектором, или ортом, называется вектор
-мерным вектором, или ортом, называется вектор  , коллинеарной заданном вектора
, коллинеарной заданном вектора  , длина которого равна единице:
, длина которого равна единице:

Возведение любого ненулевого вектора к единичному называется его нормированием.
Среди единичных векторов выделяют векторы, для которых одна из координат равна единице, а все остальные — нулю. Такие векторы обозначают маленькой буквой  с индексом, что указывает на номер координаты, равной единице. В пространстве
с индексом, что указывает на номер координаты, равной единице. В пространстве  существует
существует  различных
различных  -мерных единичных векторов:
-мерных единичных векторов:

В частности, в трехмерном пространстве эти векторы называются ортами координатных осей, они имеют собственные обозначения:

Кутом между двумя векторами  и
и  называется кут
называется кут  , который определяется соотношением:
, который определяется соотношением:

Согласно (4.9) скалярное произведение можно рассматривать как общую числовую характеристику двух векторов.
Свойства скалярного произведения:

Линейное пространство, для которого определено скалярное произведение векторов со свойствами (4.10), называется евклидовым пространством.
В тeopии линейных пространств любое множество векторов одинаковой размерности называется системой векторов.
Пусть имеем систему, которая состоит из  векторов, принадлежащих пространства
векторов, принадлежащих пространства  . (Измеримость пространства обозначено через
. (Измеримость пространства обозначено через  в отличие от обозначения через количества векторов системы.) Систему векторов, имеющих размерность , можно рассматривать как матрицу размером
в отличие от обозначения через количества векторов системы.) Систему векторов, имеющих размерность , можно рассматривать как матрицу размером  , столбцами которой являются -мерные векторы, и наоборот:
, столбцами которой являются -мерные векторы, и наоборот:

С помощью этой системы векторов систему линейных алгебраических уравнений с  неизвестными можно представить в вeктopний форме:
неизвестными можно представить в вeктopний форме:

или кратко:

Действительно, если по правилам сложения векторов и умножения на скаляр умножить каждый вектор  по координатам на
по координатам на  а затем записать сумму результатов и приравнять координаты полученных векторов в левой и правой частях, то придем к системе линейных алгебраических уравнений ( 1.6). Решением такой системы будет
а затем записать сумму результатов и приравнять координаты полученных векторов в левой и правой частях, то придем к системе линейных алгебраических уравнений ( 1.6). Решением такой системы будет  -мерный вектор
-мерный вектор 
Замечания. На основе тeopии -мерных линейных пространств можно построить всю теорию матриц, в частности матричную алгебру, теорию систем линейных алгебраических уравнений и др. Поэтому линейной алгеброй, основы которой мы рассматриваем, называют раздел математики, объектом изучения которого являются линейные (векторные) пространства, а предметом — разработка соответствующих алгебраических методов для установления свойств пространств в целом и иx элементов в частности.
Линейная зависимость и независимость векторов
Пусть имеется система векторов  , принадлежащие пространству
, принадлежащие пространству  и действительные числа (скаляры)
и действительные числа (скаляры)  . Произвольное
. Произвольное  -мерный вектор
-мерный вектор  , называют линейной комбинацией векторов системы, если его можно представить в виде суммы произведений чисел
, называют линейной комбинацией векторов системы, если его можно представить в виде суммы произведений чисел  на вектор и
на вектор и  :
:

Векторы называются линейно зависимыми, если хотя бы один из векторов системы является линейной комбинацией других. В противном случае, когда в системе векторов нет ни одного, который был бы линейной комбинацией других, векторы называются линейно независимыми.
Теорема 4.1 (про линейную зависимость системы векторов). Если среди чисел  , где
, где  , не все равны нулю, и выполняется равенство
, не все равны нулю, и выполняется равенство

то система векторов  является линейно зависимой.
является линейно зависимой.
Доказательство. Пусть в равенстве (4.14) среди чисел  существуют числа, отличающиеся от нуля. Выберем одно из них, неважно какое. Пусть этим числом будет
существуют числа, отличающиеся от нуля. Выберем одно из них, неважно какое. Пусть этим числом будет  . Умножим левую и правую части равенства (4.14) на
. Умножим левую и правую части равенства (4.14) на 

Отсюда получаем:

а согласно (4.13) это означает, что система векторов  является линейно зависимой, поскольку вектор
является линейно зависимой, поскольку вектор  является линейной комбинацией других векторов системы.
является линейной комбинацией других векторов системы.
Последствие из теоремы 4.1 (о линейной независимости системы векторов).
Система векторов есть линейно независимой, если векторное равенство 
выполняется только в случае  (все числа равны нулю).
(все числа равны нулю).
Доказательство. Предположим, что система векторов линейно независима, и при этом существуют  , где
, где  . Тогда из теоремы 4.1 получим линейную зависимость системы векторов, которая противоречит условию.
. Тогда из теоремы 4.1 получим линейную зависимость системы векторов, которая противоречит условию.
Одной из основных задач теории линейных пространств является задача исследования системы векторов на линейную независимость, то есть выяснения вопрос о том, какова есть заданная система векторов — линейно зависимой или линейно независимой.
Решение этой задачи сводится к решению систем линейных уравнений.
Запишем равенство (4.14) в координатной форме:

выполним умножение векторов системы на скаляры найдем сумму полученных произведений и приравняем координаты векторов левой и правой частей равенства, что дает систему однородных линейных уравнений относительно постоянных
найдем сумму полученных произведений и приравняем координаты векторов левой и правой частей равенства, что дает систему однородных линейных уравнений относительно постоянных  :
:

По следствием из теоремы 4.1 система векторов линейно независимая, если система однородных уравнений (4.15) имеет только тривиальное решение:  Если ранг основной матрицы системы равен числу неизвестных
Если ранг основной матрицы системы равен числу неизвестных  , то для этого необходимо и достаточно, чтобы ее определитель не равнялся нулю.
, то для этого необходимо и достаточно, чтобы ее определитель не равнялся нулю.
Проведем исследование на линейную независимость системы векторов:

Запишем векторное равенство:

Отсюда получаем систему уравнений:

Вычислим определитель основной матрицы системы:

Поскольку  , однородная система линейных уравнений относительно коэффициентов
, однородная система линейных уравнений относительно коэффициентов  имеет множество решений.
имеет множество решений.
Преобразование основной матрицы системы по методу Жордана-Гаусса позволяет определить количество линейно независимых векторов в заданной системе векторов:

Ранг матрицы системы  меньше количества векторов, поэтому система содержит только два линейно независимых вектора. По последнему преобразованию имеем:
меньше количества векторов, поэтому система содержит только два линейно независимых вектора. По последнему преобразованию имеем:

Подставляя найденные коэффициенты в векторное равенство (4.14), получим

Таким образом, векторы  и
и  является линейно зависимыми и любой из них можно представить в виде линейной комбинации двух других. Например, разделив последнее равенство на
является линейно зависимыми и любой из них можно представить в виде линейной комбинации двух других. Например, разделив последнее равенство на  , определим вектор
, определим вектор  ; как линейную комбинацию векторов
; как линейную комбинацию векторов  и
и  :
:

В линейной алгебре широко применяется система п единичных векторов  пространства
пространства  , из которых согласно (4.11) можно образовать единичную матрицу
, из которых согласно (4.11) можно образовать единичную матрицу  -го порядка. Поскольку для любого
-го порядка. Поскольку для любого  определитель такой матрицы не равен нулю, то для пространства любой размерности система таких единичных векторов линейно независимой.
определитель такой матрицы не равен нулю, то для пространства любой размерности система таких единичных векторов линейно независимой.
Рассмотрим питания о наибольшее количество векторов, которое может содержать линейно независимая система  -мерных векторов.
-мерных векторов.
Выберем из пространства  произвольным образом систему
произвольным образом систему  векторов:
векторов:

запишем векторное равенство

и соответствующую ей однородную линейную систему  уравнений с
уравнений с  неизвестными
неизвестными

Для ответа на поставленный вопрос будем исходить из сравнения количества векторов системы  с размерностью пространства
с размерностью пространства  , учитывая иx соотношение с рангом матрицы.
, учитывая иx соотношение с рангом матрицы.
1. Если количество векторов больше измеримости пространства  , то ранг основной матрицы однородной системы уравнений не будет превышать количество строк, а значит и количество неизвестных
, то ранг основной матрицы однородной системы уравнений не будет превышать количество строк, а значит и количество неизвестных  . В этом случае система имеет множество решений, среди которых есть и нетривиальные, то есть среди чисел
. В этом случае система имеет множество решений, среди которых есть и нетривиальные, то есть среди чисел  существуют отличающиеся от нуля. Итак, по теореме 4.1 такая система векторов линейно зависима.
существуют отличающиеся от нуля. Итак, по теореме 4.1 такая система векторов линейно зависима.
2. Если количество векторов равно размерности пространства  , то такой системе уравнений соответствует квадратная основная матрица
, то такой системе уравнений соответствует квадратная основная матрица  -го порядка. Система векторов будет линейно независимой, если определитель системы уравнений отличается от нуля
-го порядка. Система векторов будет линейно независимой, если определитель системы уравнений отличается от нуля  .
.
Из проведенного анализа следует, что наибольшее количество линейно независимых векторов равно размерности линейного пространства.
Базис n -мерного пространства. Разложение вектора по базису
Понятие  базис
базис (от греч. basis — основа) является одним из фундаментальных понятий теории векторных пространств. Любая система
(от греч. basis — основа) является одним из фундаментальных понятий теории векторных пространств. Любая система  линейно независимых
линейно независимых  -мерных векторов
-мерных векторов  называется базисом линейного пространства
называется базисом линейного пространства  . Определитель, состоящий из координат векторов базиса отличается от нуля, так как совокупность векторов содержит
. Определитель, состоящий из координат векторов базиса отличается от нуля, так как совокупность векторов содержит  линейно независимых векторов и любой другой вектор является линейной комбинацией базисных векторов.
линейно независимых векторов и любой другой вектор является линейной комбинацией базисных векторов.
Теорема 4.2 (о разложении  -мерного вектора по базису).
-мерного вектора по базису).
Произвольный вектор  с
с  можно представить в виде линейной комбинации векторов базиса
можно представить в виде линейной комбинации векторов базиса  и к тому же единственным способом.
и к тому же единственным способом.
Доказательство. Согласно определению линейной комбинации системы векторов (4.13) надо показать существование единого набора цифр  , таких, что сумма произведений этих цифр с векторами базиса дает вектор
, таких, что сумма произведений этих цифр с векторами базиса дает вектор  :
:

Представим векторы  и вектор
и вектор  через их координаты:
через их координаты:

и запишем соответствующую систему линейных уравнений:

Поскольку определитель основной матрицы системы отличается от нуля (по условию векторы  образуют базис пространства), то система уравнений совместима и имеет единственное решение, которым является набор чисел
образуют базис пространства), то система уравнений совместима и имеет единственное решение, которым является набор чисел 

Представление вектора  в виде линейной комбинации векторов базиса (4 16) называется разложением вектора по базису, а числа
в виде линейной комбинации векторов базиса (4 16) называется разложением вектора по базису, а числа  коэффициентами разложения, или координатами вектора по этому базису.
коэффициентами разложения, или координатами вектора по этому базису.
Система  -мерных единичных векторов
-мерных единичных векторов  называется единичным базисом
называется единичным базисом  . Единичный базис является частным случаем так называемых ортогональных базисов, то есть таких базисов, что скалярное произведение любых двух векторов с базиса равно нулю:
. Единичный базис является частным случаем так называемых ортогональных базисов, то есть таких базисов, что скалярное произведение любых двух векторов с базиса равно нулю:  Ортогональный базис из нормированных векторов называется ортонормированным.
Ортогональный базис из нормированных векторов называется ортонормированным.
Запись  -мерного вектора в виде
-мерного вектора в виде  , то есть представление его в координатные форме, можно рассматривать как разложение вектора
, то есть представление его в координатные форме, можно рассматривать как разложение вектора  за ортонормированным базисом.
за ортонормированным базисом.
Определение базиса пространства и разложения вектора по базису можно выполнять одновременно, аналогично тому, как выбор базисных неизвестных и нахождения решений СЛАУ осуществляли при применении методов Гаусса и Жордана-Гаусса.
Осуществить разложение вектора  по векторам
по векторам 
 если они образуют базис.
если они образуют базис.
Для решения задачи представим вектор  как линейную комбинацию векторов
как линейную комбинацию векторов  и
и  :
:

где  неизвестные коэффициенты разложения, или координаты вектора
неизвестные коэффициенты разложения, или координаты вектора  при условии, что вектор и
при условии, что вектор и  образуют базис.
образуют базис.
Представим векторы  и вектор
и вектор  через координаты и получим систему уравнений относительно координат вектора
через координаты и получим систему уравнений относительно координат вектора  :
:

Проверку на линейную независимость векторов  и отыскания координат вектора
и отыскания координат вектора  по базису
по базису  можно проводить одновременно.
можно проводить одновременно.
Для этого запишем расширенную матрицу системы и проведем ее преобразования по методу Жордана-Гаусса:

Поскольку элементарными преобразования на месте основной матрицы системы получено единичную матрицу третьего порядка, то определитель исходной матрицы отличен от нуля, и система векторов 
 является линейно независимой, то есть она образует базис пространства
является линейно независимой, то есть она образует базис пространства  . Вектор
. Вектор  можно разложить по этому базису единственным способом:
можно разложить по этому базису единственным способом:

Следовательно, координатами вектора  в базисе
в базисе  будут
будут 
В другом базисе вектор будет иметь другие координаты. В ортонормированном базисе он выглядит так:  то есть
то есть 
Любой вектор с  , заданный в координатной форме, можно рассматривать как его разложение по ортонормированному базису.
, заданный в координатной форме, можно рассматривать как его разложение по ортонормированному базису.
Переход к новому базису. Нахождение базисных решений системы линейных алгебраических уравнений
Представим произвольный вектор  с
с  в виде линейной комбинации векторов базиса
в виде линейной комбинации векторов базиса 

где  координаты вектора
координаты вектора  в данном базисе.
в данном базисе.
Выясним, как можно осуществить переход от одного базиса линейного пространства к другому и найти координаты вектора  в новом базисе за известными координатами вектора в начальном ортонормированном базисе.
в новом базисе за известными координатами вектора в начальном ортонормированном базисе.
Пусть в пространстве  есть два базиса: начальный
есть два базиса: начальный  и новый
и новый  Каждый из векторов нового базиса можно представить в линейную комбинацию векторов начального базиса:
Каждый из векторов нового базиса можно представить в линейную комбинацию векторов начального базиса:

Запишем систему (4.17) в матричном виде:  где
где

Неособенная матрица  называется матрицей пepexoда от начального базиса
называется матрицей пepexoда от начального базиса  к новому
к новому  . Переход от нового базиса к первоначальному осуществляется по формуле:
. Переход от нового базиса к первоначальному осуществляется по формуле: 
Можно показать, что зависимость между координатами вектора в разных базисах определяется формулами:

где  вектор
вектор  с координатами в новом базисе
с координатами в новом базисе 
Переход к новому базису широко используется в задачах линейного программирования и в других задачах математических методов в экономике.
Задан вектор  в ортонормированном базисе векторов
в ортонормированном базисе векторов 
 и
и  Найдем координаты вектора
Найдем координаты вектора  в базисе из векторов
в базисе из векторов 
 и
и  с помощью матрицы перехода.
с помощью матрицы перехода.
В предыдущем примере было показано, что векторы  образуют базис. Опишем связь между базисами с помощью системы векторных уравнений:
образуют базис. Опишем связь между базисами с помощью системы векторных уравнений:

Матрица перехода от базиса  и
и  к базису
к базису  и
и  является основной матрицей системы векторных уравнений:
является основной матрицей системы векторных уравнений:

Транспонируем матрицу  :
:

Для нее существует обратная матрица, поскольку  Находим ее:
Находим ее:

По соотношению (4.18) определяем координаты вектора  в базисе векторов
в базисе векторов 
 и
и 

Рассмотрим разложение вектора по новому базису для нахождения базисных решений СЛАУ.
Запишем систему линейных алгебраических уравнений в векторной форме

где коэффициентами при неизвестных системы являются векторы 
 которые образуют основную матрицу системы,
которые образуют основную матрицу системы,  вектор-столбец свободных членов,
вектор-столбец свободных членов,  — неизвестные системы, или коэффициенты разложения вектора
— неизвестные системы, или коэффициенты разложения вектора  по векторам
по векторам  .
.
Система линейных уравнений называется сводной к единичному базису, если среди векторов  есть единичный базис. Система имеет единственное решение только в случае, если количество неизвестных системы совпадает с размерностью векторов
есть единичный базис. Система имеет единственное решение только в случае, если количество неизвестных системы совпадает с размерностью векторов  и все векторы системы образуют базис
и все векторы системы образуют базис 
В общем случае, если количество векторов, образующих базис, меньше количества векторов системы  , то система линейных уравнений имеет множество решений, среди которых необходимо найти все базисные.
, то система линейных уравнений имеет множество решений, среди которых необходимо найти все базисные.
Таким образом, для нахождения всех базисных решений системы можно предложить такой алгоритм:
1) сводим систему линейных уравнений элементарными преобразованиями к единичному базису;
2) находим значения неизвестных, что соответствуют данном базису, то есть координаты вектора  в этом базисе (свободные неизвестные возлагаем равными нулю)
в этом базисе (свободные неизвестные возлагаем равными нулю)
3) выполняем преобразование системы уравнений с целью введения в базис других векторов системы. Тогда координаты вектора равны соответствующим неизвестным системы линейных уравнений в новом базисном решении и т. д.
Заметим, что максимальное количество базисных решений равно количеству сопряжений с  векторов системы по
векторов системы по  , где
, где  — размерность пространства.
— размерность пространства.
Найдем все базисные решения системы линейных уравнений

В векторной форме система уравнений имеет вид

где 
Среди заданных векторов  определим все возможные базисы и осуществим расписание вектора
определим все возможные базисы и осуществим расписание вектора  по каждому из этих базисов.
по каждому из этих базисов.
Есть четыре вектора двумерного пространства, среди которых необходимо определить базисные. Поскольку наибольшее количество линейно независимых векторов в этом пространстве равно двум, то все четыре вектора не могут быть линейно независимыми. Сводим систему линейных уравнений к единичному базису. Запишем матрицу коэффициентов системы в таблице 4.1 и выполним элементарные преобразования этой системы по методу Жордана-Гаусса.
Сведение системы уравнений к единичному базису Таблица 4.1

По результатам последней операции получено единичную матрицу.
Следовательно, векторы  и
и  образуют единичный базис пространства. Координаты вектора
образуют единичный базис пространства. Координаты вектора  в этом базисе
в этом базисе  Для нахождения базисного решению системы положим
Для нахождения базисного решению системы положим  тогда базисным решением системы будет
тогда базисным решением системы будет  По базису из векторов и можно разложить не только вектор , но и все другие векторы:
По базису из векторов и можно разложить не только вектор , но и все другие векторы:

Количество базисов для данного примера определяется количеством соединений из четырех векторов  по два
по два  , то есть равна шести. Преобразование системы по методу Жордана-Гаусса для нахождения других базисных решений приведены в таблице 4.2.
, то есть равна шести. Преобразование системы по методу Жордана-Гаусса для нахождения других базисных решений приведены в таблице 4.2.
В таблице 4.2 первым из базисных решений системы приведено именно то, которое получили в таблице 4.1.
Нахождение базисных решений Таблица 4.2

Заметим, что среди шестерых базисных решений данной системы линейных уравнений только  и
и  имеют среди своих координат отрицательные, то есть эти решения не являются опорными.
имеют среди своих координат отрицательные, то есть эти решения не являются опорными.
В рамках учебной дисциплины  Оптимизационные модели и методы
Оптимизационные модели и методы изучается специальный алгоритм отбора только опорных решений системы, по которому в базис не вводятся векторы, которые в новом базисе превращают вектор
изучается специальный алгоритм отбора только опорных решений системы, по которому в базис не вводятся векторы, которые в новом базисе превращают вектор  на вектор, имеет отрицательное координаты.
на вектор, имеет отрицательное координаты.
Однородная система уравнений. Особенности решения
Рассмотрим векторный подход к нахождению общего решения систем линейных уравнений (1.9):

где  основная матрица системы;
основная матрица системы;
 матрица-столбец неизвестных;
матрица-столбец неизвестных;
 нулевая матрица-столбец.
нулевая матрица-столбец.
В векторной форме система однородных линейных уравнений имеет вид:

где  основная матрица системы;
основная матрица системы;

 -измеримые векторы (столбцы матрицы
-измеримые векторы (столбцы матрицы 
 вектор неизвестных;
вектор неизвестных;
 нулевой вектор.
нулевой вектор.
Если ранг основной матрицы меньше количества неизвестных  то однородная система уравнений имеет множество решений.
то однородная система уравнений имеет множество решений.
Пусть коэффициенты при неизвестных  составляют базисный минор, другие неизвестные свободны. Если систему (4.20) решить относительно базисных неизвестных, то общее решение (по аналогии с (3.7)) будет иметь вид:
составляют базисный минор, другие неизвестные свободны. Если систему (4.20) решить относительно базисных неизвестных, то общее решение (по аналогии с (3.7)) будет иметь вид:

где  линейные функции, отражающие законы зависимости базисных неизвестных
линейные функции, отражающие законы зависимости базисных неизвестных  от свободных неизвестных
от свободных неизвестных 
По свойству 3 (п. 3.2) любая линейная комбинация решений однородной системы также является решением этой системы.
Фундаментальной системой решений однородной системы уравнений называется такая линейно независимая система векторов  ранг основной матрицы системы), их линейные комбинации определяют все бесконечное множество решений системы.
ранг основной матрицы системы), их линейные комбинации определяют все бесконечное множество решений системы.
Теорема 4.3 (пpo фундаментальную систему решений). Однородная система уравнений (4.20) имеет фундаментальную систему решений, количество векторов которой равно  , где
, где  — ранг системы уравнений
— ранг системы уравнений
Доказательство. Предоставим свободным неизвестным  последовательно
последовательно  значений, которые являются элементами столбцов единичной матрицы:
значений, которые являются элементами столбцов единичной матрицы:

(Конечно, при  получаем тривиальное решение.)
получаем тривиальное решение.)
Выражения базисных неизвестных  через свободные получим при равенстве (4.21), при этом получим
через свободные получим при равенстве (4.21), при этом получим  частных решений системы:
частных решений системы:  Эти решения линейно независимы, ведь матрица, составленная из координат всех векторов, включая единичную матриuю (4.22) порядка
Эти решения линейно независимы, ведь матрица, составленная из координат всех векторов, включая единичную матриuю (4.22) порядка 
Вектор 
где  как линейная комбинация решений системы (4.22) тоже будет и решением.
как линейная комбинация решений системы (4.22) тоже будет и решением.
Если числа  , брать равными координатам векторов
, брать равными координатам векторов  , которые соответствуют свободным неизвестным
, которые соответствуют свободным неизвестным  системы уравнений, то этот вектор опишет (отобразит) общее решение системы.
системы уравнений, то этот вектор опишет (отобразит) общее решение системы.
Следовательно, для нахождения общего решения однородной системы уравнений выполняем следующее:
1. Выражает базисные неизвестные системы (4.20) через свободные.
2. Предоставляем значение свободным  неизвестным системы согласно (4.21).
неизвестным системы согласно (4.21).
3. Подставляемые в (4.21) последовательно значение свободных неизвестных (4.22), находим базисные неизвестные, получая таким образом фундаментальную систему решений:
4. Записываем общее решение системы как линейную комбинацию фундаментальных решений (4.23).
Найдем фундаментальную систему решений однородной системы уравнений:

Чтобы выразить базисные неизвестные системы через свободные неизвестные, воспользуемся методом Жордана-Гаусса. Выполняем элементарные преобразования основной матрицы системы для получения в ней единичной матрицы:

Выбираем за базисные неизвестные  , тогда
, тогда  и
и  есть свободными. Общее решение системы (4.24) получим в виде:
есть свободными. Общее решение системы (4.24) получим в виде:

Если свободным неизвестным последовательно предоставить значения  а затем
а затем  получим соответствующие частные решения системы
получим соответствующие частные решения системы  и
и  . Система векторов
. Система векторов  и
и  является фундаментальной системой решений.
является фундаментальной системой решений.
Общее решение системы уравнений в векторной форме находим как линейную комбинацию фундаментальных решений, а именно:

где 
Тогда общее решение однородной системы уравнений, составленный из фундаментальных решений системы, имеет вид:

Замечания. Аналогично можно представить общее решение и неоднородной системы уравнений, которая имеет множество решений.
Пусть система неоднородных уравнений

совместима, но ранг матрицы системы меньше количества неизвестных  . Тогда ее общее решение определяется формулой
. Тогда ее общее решение определяется формулой

где  произвольное частичное решение неоднородной системы (4.25), а
произвольное частичное решение неоднородной системы (4.25), а

— общее решение (4.22) соответствующей однородной системы уравнений (4.20).
Найдем общее решение неоднородной системы уравнений:

Если праве части всех уравнений положить равными нулю, то получим однородной систему уравнений (4.24), общее решение которой определен в предыдущем примере:

где 
Найдем произвольный частное решение неоднородной системы. Например, возьмем свободные неизвестные равными нулю:  , и найдем
, и найдем  и
и  , тогда
, тогда  . Таким образом, общим решением системы (4.27) является вектор:
. Таким образом, общим решением системы (4.27) является вектор:

где 
или

Такое представление общего решения неоднородной системы линейных алгебраических уравнений обобщается на произвольные неоднородные системы, которые имеют множество решений.
Лекции:
- Исследовать ряд на абсолютную сходимость
- Комплексные числа: примеры решения
- Уравнение окружности и прямой
- Область определения функции примеры решения
- Неопределенный интеграл
- Объемы многогранников
- Приложения определенного интеграла
- Дифференциальное вычисление функции одной переменной
- Решение слау
- Каноническое уравнение параболы