Андрей Геннадьевич Блохин
Эксперт по предмету «Физика»
Задать вопрос автору статьи
Сущность понятия «центр масс»
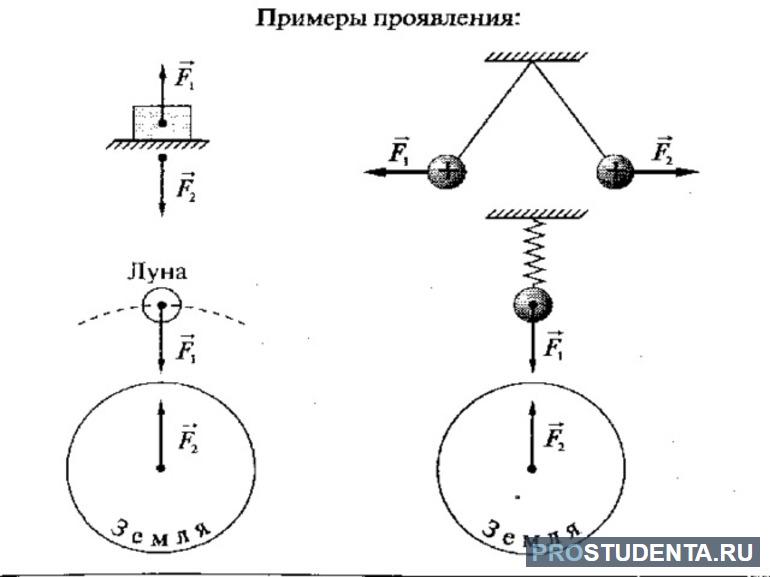
Понятие «центр масс» широко используется в физике для решения задач, связанных с движением тел. Например, математический маятник удобно представить себе как подвешенное на нити тело, вся масса которого сконцентрирована в единой точке. В законе всемирного тяготения тоже речь идет о расстоянии не между телами, а между центрами тел, под каковыми подразумеваются именно центры масс, а не геометрические центры.
Определение 1
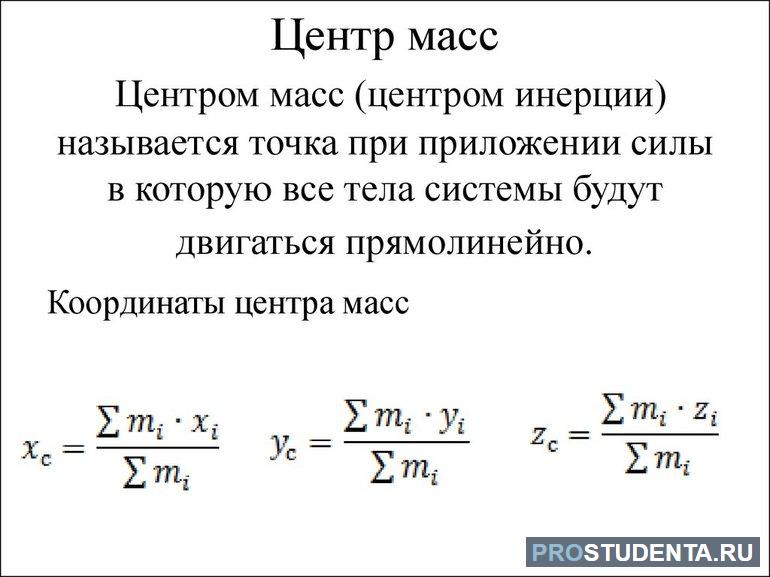
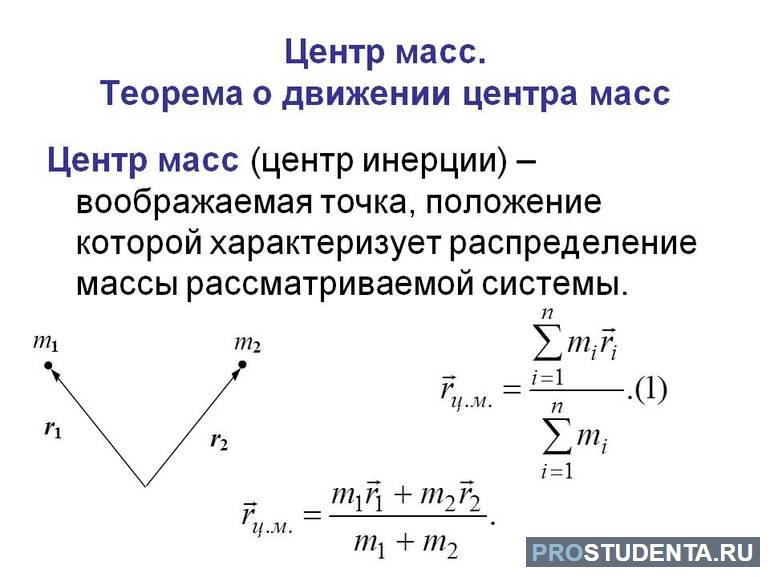
Центр масс — точка, характеризующая размещение и движение исследуемой системы как единого целого.
Признаком центра масс является то, что если тело подвесить, закрепив за эту точку, оно останется в покое, т.е. не будет раскачиваться или вращаться относительно этого центра. В простейшем случае, если речь идет о симметричном теле с равномерной плотностью, центр масс находится на пересечении осей симметрии рассматриваемого тела. Например, если взять линейку длиной 30 см, то ее центр масс будет расположен на отметке «15 см». Подложив карандаш под эту отметку, легко привести линейку в положение равновесия.
На практике далеко не все тела, центр масс которых нужно найти, являются симметричными и однородными по плотности. Более того, многие исследуемые объекты представляют собой системы из нескольких тел с различными геометрическими и химическими характеристиками. Для расчетов их разбивают на элементарные фрагменты и производят вычисления поэтапно.
Нахождение координат центра масс
Определение 2
Центр масс двух тел с точечными массами $m_1$ и $m_2$ и координатами на координатной прямой $x_1$ и $x_2$ находится в точке, делящей расстояние между этими телами на отрезки с длинами обратно пропорциональными массам рассматриваемых тел.
Отсюда следует, что чем массивнее тело в такой элементарной системе, тем ближе оно к общему центру масс.
Расстояние между точечными телами равно:
$Delta x = x_2 — x_1$
Пропорция между массами и расстояниями, согласно определению:
$frac{l_1}{l_2} = frac{m_2}{m_1}$,
«Как найти координаты центра масс» 👇
где $l_1$, $l_2$ — расстояния от соответствующих тел до центра масс.
Выразив, длины через координаты
$l_1 = x_c — x_1; l_2 = x_2 — x_c$,
центр масс можно определить как
$x_c = frac{m_1 cdot x_1 + m_2 cdot x_2}{m_1 + m_2}$.
где $x_c$ — координата центра тяжести.
Разложив любую сложную систему на множество элементарных тел с точечными массами, можно обобщить изложенный принцип в виде формулы (для оси абсцисс):
$x_c = frac{sumlimits^N_{i=1}{m_i cdot x_i}}{sumlimits^N_{i=1}{m_i}}$
В большинстве случаев центр масс требуется найти не на координатной прямой, а в двух- или трехмерной системе координат. Для дополнительных осей координаты центра масс ($y_c$, $z_c$) находят по аналогичному принципу.
Замечание 1
Центр тяжести системы тел представляет собой точку, подобную центру масс, но рассчитывается не для масс, а для весов (обусловленных гравитацией сил), действующих на точечные тела, входящие в систему. Центр тяжести определяется так же, как и центр масс, если размеры системы малы в сравнении с радиусом планеты Земля. Он в большинстве случаев с достаточной для практики точностью совпадает с центром масс рассматриваемой системы.
Пример 1
Найти центр масс двух линеек, изготовленных из одинакового материала, одинаковой толщины и ширины, левые концы линеек совмещены. Длины линеек — 10 и 30 см. Толщиной линеек можно пренебречь.
Поскольку толщиной можно пренебречь, найти нужно лишь координату центра масс по оси $x$.
Разобьем мысленно систему на два отрезка. Первый — где толщина линеек складывается. Его координаты — $[0, 10]$. Второй отрезок — где длинная линейка продолжается одна. Его координаты — $[10, 30]$. Примем за единицу измерения массу одного погонного сантиметра линейки. Тогда масса второго фрагмента:
$m_2 = 30 — 10 = 20$
На каждый сантиметр первого фрагмента приходится вдвое больше массы, поскольку там сложены две линейки:
$m_1 = 10 cdot 2 = 20$
Центры масс отрезков находятся на их осях симметрии, т.е. на середине длины каждого:
$x_{c1} = frac{10}{2} = 5$;
$x_{c2} = 10 + frac{20}{2} = 20$
Подставим значения в формулу:
$x_c = frac{m_1 cdot x_1 + m_2 cdot x_2}{m_1 + m_2}$
$x_c = frac{20 cdot 5 + 20 cdot 20}{20 +20} = frac{100 + 400}{40} = 12, 5$
Ответ: центр масс находится на расстоянии 12,5 см от левого конца системы линеек.
Находи статьи и создавай свой список литературы по ГОСТу
Поиск по теме
Определение центра масс, теория и онлайн калькуляторы
Определение центра масс
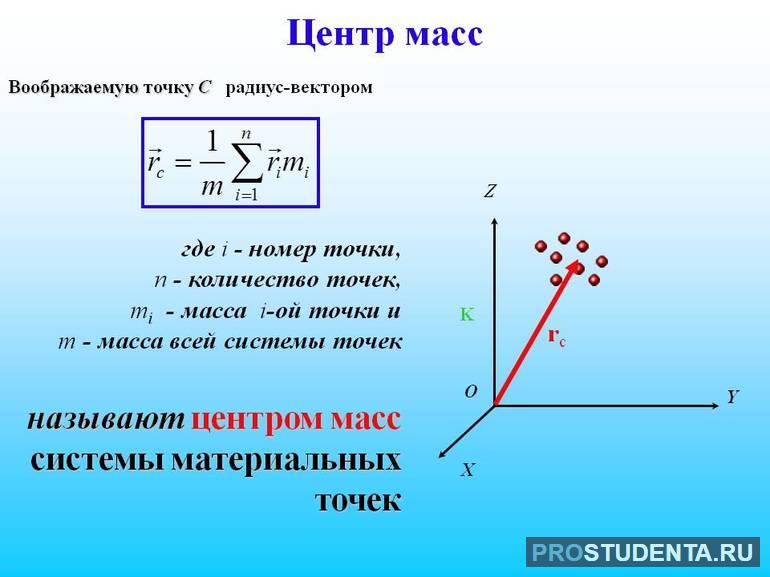
При исследовании поведения систем частиц, часто удобно использовать для описания движения такую точку, которая характеризует положение и движение рассматриваемой системы как единого целого. Такой точкой служит центр масс.
Для однородных тел обладающих симметрией центр масс часто совпадает с геометрическим центром тела. В однородном изотропном теле одной выделенной точке найдется симметричная ей точка.
Радиус-вектор и координаты центра масс
Предположим, что у нас имеются две частицы с равными массами, им соответствуют радиус-векторы: ${overline{r}}_1 и {overline{r}}_2$ . В этом случае центр масс расположен посередине между частицами. Центр масс (точка C) определён радиус-вектором ${overline{r}}_C$ (рис.1).
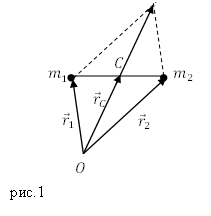
Из рис.1 видно, что:
[{overline{r}}_C=frac{{overline{r}}_1+ {overline{r}}_2}{2}left(1right).]
Можно ожидать, что вместе с геометрическим центром системы радиус-вектор, которого равен ${overline{r}}_C,$ играет роль точка, положение которой определяет распределение массы. Ее определяют так, чтобы вклад каждой частицы был пропорционален ее массе:
[{overline{r}}_C=frac{{overline{r}}_1m_1+ {overline{r}}_2m_2}{m_1+m_2}left(2right).]
Радиус -вектор ${overline{r}}_C$, определенный выражением (2) — средне взвешенная величина радиус-векторов частиц ${overline{r}}_1$ и ${overline{r}}_2$. Это становится очевидным, если формулу (2) представить в виде:
[{overline{r}}_C=frac{m_1}{m_1+m_2}{overline{r}}_1+frac{m_2}{m_1+m_2}{overline{r}}_2left(3right).]
Выражение (3) показывает, что радиус-вектор каждой частицы входит в ${overline{r}}_C$ с весом, который пропорционален его массе.
Выражение (3) легко обобщается для множества материальных точек, которые расположены произвольным образом.
Если положения N материальных точек системы задано при помощи их радиус-векторов, то радиус — вектор, определяющий положение центра масс находим как:
[{overline{r}}_c=frac{sumlimits^N_{i=1}{m_i{overline{r}}_i}}{sumlimits^N_{i=1}{m_i}}left(4right).]
Выражение (4) считают определением центра масс системы.
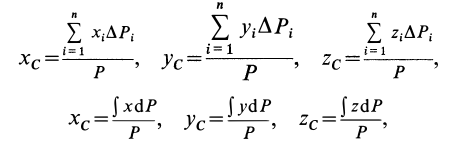
При этом абсцисса центра масс равна:
[x_c=frac{sumlimits^N_{i=1}{m_ix_i}}{sumlimits^N_{i=1}{m_i}}left(5right).]
Ордината ($y_c$) центра масс и его аппликата ($z_c$):
[y_c=frac{sumlimits^N_{i=1}{m_iy_i}}{sumlimits^N_{i=1}{m_i}}left(6right).]
[z_c=frac{sumlimits^N_{i=1}{m_iz_i}}{sumlimits^N_{i=1}{m_i}}left(7right).]
Формулы (4-7) совпадают с формулами, которые используют для определения тяжести тела. В том случае, если размеры тела малы в сравнении с расстоянием до центра Земли, центр тяжести считают совпадающим с центром масс тела. В большинстве задач центр тяжести совпадает с центром масс тела.
Скорость центра масс
Выражение для скорости центра масс (${overline{v}}_c=frac{d{overline{r}}_c}{dt}$) запишем как:
[{overline{v}}_c=frac{m_1{overline{v}}_1+m_2{overline{v}}_2+dots +m_n{overline{v}}_n}{m_1+m_2+dots +m_n}=frac{overline{P}}{M}left(8right),]
где $overline{P}$ — суммарный импульс системы частиц; $M$ масса системы. Выражение (8) справедливо при движениях со скоростями которые существенно меньше скорости света.
Если система частиц является замкнутой, то сумма импульсов ее частей не изменяется. Следовательно, скорость центра масс при этом величина постоянная. Говорят, что центр масс замкнутой системы перемещается по инерции, то есть прямолинейно и равномерно, и это движение не зависимо от движения составных частей системы. В замкнутой системе могут действовать внутренние силы, в результате их действия части системы могут иметь ускорения. Но это не оказывает влияния на движение центра масс. Под действием внутренних сил скорость центра масс не изменяется.
Примеры задач на определение центра масс
Пример 2
Задание. Система составлена из материальных точек (рис.2), запишите координаты ее центра масс?
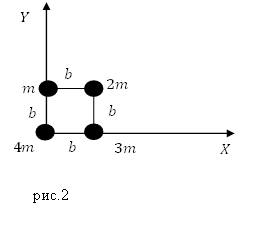
Решение. Рассмотрим рис.2. Центр масс системы лежит на плоскости, значит, у него две координаты ($x_c,y_c$). Найдем их используя формулы:
[left{ begin{array}{c}
x_c=frac{sumlimits_i{Delta m_ix_i}}{m};; \
y_с=frac{sumlimits_i{Delta m_iy_i}}{m}. end{array}
right.]
Вычислим массу рассматриваемой системы точек:
[m=m+2m+3m+4m=10 m.]
Тогда абсцисса центра масс $x_{c } $равна:
[x_c=frac{0cdot 4m+3mcdot b+2mcdot b}{10m}=0,5 b.]
Ордината $y_с$:
[y_с=frac{0cdot m+mcdot b+2mcdot b}{10m}=0,3 b.]
Ответ. $x_c=0,5 b$; $y_с=0,3 b$
Пример 2
Задание. Космонавт, имеющий массу $m$, неподвижен относительно корабля массы $M$. Двигатель космического аппарата выключен. Человек начинает подтягиваться к кораблю при помощи легкого троса. Какое расстояние пройдет космонавт ($s_1$), какое корабль ($s_2$) до точки встречи? В начальный момент расстояние между ними равно $s$.
Решение. Центр масс корабля и космонавта лежит на прямой, соединяющей эти объекты.
В космосе, где внешние силы отсутствуют, центр масс замкнутой системы (корабль-космонавт) либо покоится, либо движется с постоянной скоростью. В избранной нами (инерциальной) системе отсчета он покоится. При этом:
[frac{s_1}{s_2}=frac{m_2}{m_1}left(2.1right).]
По условию:
[s=s_1+s_2left(2.2right).]
Из уравнений (2.1) и (2.2) получаем:
[s_1=sfrac{m_2}{m_1+m_2};; s_2=sfrac{m_1}{m_1+m_2}.]
Ответ. $s_1=sfrac{m_2}{m_1+m_2};; s_2=sfrac{m_1}{m_1+m_2}$
Читать дальше: период и частота колебаний.

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 430 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
Точку, в которой происходит равное распределение величины, определяющей инерционные и гравитационные свойства, называют центром масс. Формула для определения параметра зависит от радиус-вектора частиц системы и их полной энергии. Эту характеристику тела отличают от тяжести, при этом в трудах советских учёных Ландау, Лифшица для неё используется термин «центр инерции».
Оглавление:
- Общие сведения
- Связь с центром тяжести
- Вычисление положения
- Геометрический способ определения
Общие сведения
Допустим, имеется тело, на которое действуют скомпенсированные силы. В этом случае оно будет в состоянии покоя или прямолинейного равномерного движения. Пусть тело будет неподвижным. Например, лодка на воде. К ней можно приложить воздействие F1 в районе её кормы. Под действием силы она начнёт разворачиваться. Аналогично если воздействовать на её нос F2, то она тоже будет поворачиваться, но при этом разворот будет происходить в другую сторону.
Получается, что можно подобрать такую линию, на которой действие сил приведёт её к ускоренно поступательному движению. Пусть это будет F3. На самом деле таких сил может быть несколько. При этом их можно перемещать вдоль линии их воздействия. Если все такие силы изобразить в виде линий, то они пересекутся в одной точке. Такое место и называют центром масс тела (ЦМ). То есть точку, в которой пересекаются линии действия сил, вызывающие только ускоренное поступательное механическое движение.
Эта важная точка в теле и движется она довольно просто. Перемещение любого тела можно представить, как комбинацию двух видов движения:
- центра масс;
- вращения.
Существует теорема: ЦМ тела движется так, как перемещалась бы материальная точка, в которой сосредоточена вся масса и к которой приложены все воздействия, действующие на объект. Таким образом, различные виды изменения положения точек в пространстве можно описать с помощью законов Ньютона. Согласно же теореме их можно применять и к телу, если считать, что все силы приложены к центру масс.
Рассматривая объект, можно не учитывать его размер, форму, а брать во внимание только инерцию, ускорение и принцип парного взаимодействия. Фактически в механике перемещение сколь угодно сложного вида рассматривается по принципу суперпозиции и закона сохранении энергии. При этом довольно удобно изучать изменение положения в системе отсчёта связанной с этим центром. В ней полный импульс всегда будет равным нулю, что позволяет упростить уравнение движения.
Связь с центром тяжести
Пусть имеется объект, находящийся на Земле. Говорят, что на него действует сила тяжести. Но на самом деле она воздействует не на вещество, а на каждый его атом, частичку. Если предположить, что ускорение свободного падения буде одинаковым, то на объект действует очень множество сил тяжести. Рассматривать такую систему неудобно. Поэтому все воздействия заменяют равнодействующей. И считают, что действует одна сила, которая приложена к центру тяжести твёрдого тела.
Для того чтобы найти взаимосвязь между тяжестью и массой нужно представить, что объект вдруг распался на отдельные равные кусочки. Они держатся вместе, но не прикреплены друг к другу. Если тело отпустить, то они будут падать вместе, так как ускорение свободного падения не зависит от массы. При этом движение будет поступательным. Значит, сила, приложенная к телу в целом, будет приложена к центру масс.
Получается, что центральная точка является общей как для тяжести, так и для масс. Это две точки положение которых совпадает несмотря на разный их принцип определения в физике. Но существуют условия, когда это правило не выполняется. Например, если система материальных точек неоднородна по объёму плотности в гравитационном поле, то центры не совпадут.
Для примера можно привести список однородных фигур с указанием их центральной точки:
- отрезок — середина;
- параллелограмм — место пересечения диагоналей;
- треугольник — точка пересечения медиан (центроид);
- любой правильный многоугольник — центр поворотной симметрии;
- полукруг — точка, в которой перпендикулярный радиус делится в отношении 4:3p считая от центра круга.
Чтобы найти координату центра масс объекта, который можно представить, как совокупность связанных материальных точек используют два метода: аналитический и геометрический. Но второй способ не всегда можно применить. В однородном гравитационном поле центры тяжести и масс всегда совпадают. И это часто подтверждается на практике, из-за того, что внешнее гравитационное поле в задачах, связанных с действиями на Земле, считают постоянным в пределах объёма тела.
Поэтому эти термины объединяют в геометрии, статике и так далее. То есть в тех областях, где применение определения можно назвать метафорическим и предполагается ситуация их эквивалентности.
При таком понимании оба термина синонимичны, но при этом чаще предпочитают использовать термин, связанный с тяжестью. Это происходит в силу того, что исторически он появился раньше.
Вычисление положения
Пусть тело представляет собой совокупность материальных точек, лежащих на одной прямой при этом их массы разные. Задача состоит в нахождении его центра. Для этого следует вести систему координат с осью икс, которая будет совпадать с линией расположения точек. При этом тело пусть подвешено на невесомой опоре и находится под действием Земного тяготения. Это условие даёт возможность воспользоваться тем фактом, что положения центров масс и тяжести совпадают.
На каждую из материальных точек действует своя сила: m1g, m2g… mng. Если предоставить это тело самому себе, то оно будет в состоянии свободного падения. Остановить тело — подпереть, но при этом так, чтобы оно находилось в равновесии. Это значит, что сила реакции опоры должна проходить через центр тяжести, так как равнодействующая тоже её пересекает.
Получится, что сила реакции опоры будет лежать на одной прямой с силой тяжести действующей на тело в совокупности и их моменты тоже будут проходить через неё. С помощью координатной оси точкам можно присвоить положение, x1, x2… xn, а ЦМ xц. Чтобы тело находилось в равновесии необходимо выполнение двух условий:
- векторная сумма всех сил должна быть равной нулю: m1g + m2g +…+mng + F = 0;
- сумма моментов равняться нулю: Mm 1 g + Mm 2 g +…+ Mmng + MF = 0.
Из первого условия можно найти силу реакции опоры: F = (m1 + m2 +…+mn) * g. Если вращение выбрать против часовой стрелки, тогда относительно оси все моменты силы тяжести будут отрицательными, а опоры — положительные. Тогда справедливо записать: F * хц = (m1 x 1 + m2 x 2 +…+mn xn) * g.
Из последнего равенства можно выразить координату ЦМ: xц = ((m1 x 1 + m2 x 2 +…+mn xn) * g) / F. В эту формулу можно подставить выражение для F. В результате ускорение свободного падения сократится и получится: xц = (m1 x 1 + m2 x 2 +…+mn xn) / (m1 + m2 +…+mn). Это формула выглядит громоздко, но запомнить её легко. В числителе стоят произведения масс материальных точек на их координаты, а в знаменателе — вес всего тела.
Если точки не будут лежать на одной прямой, то координата ЦМ тоже не изменится. То есть приведённая формула справедлива для любого положения тела относительно координаты y.
При этом её можно применять и для рассмотрения предметов в пространстве, так как все направления в существующем мире равноправные.
Геометрический способ определения
Для простейших симметричных фигур ЦМ можно определить геометрическим методом. Для этого используются свойства диагоналей и медиан. Пусть имеется произвольной формы четырёхугольник. Изготовлен он из однородного материала.
Идея вычисления состоит в том, что эту фигуру необходимо разбить на два треугольника. Для этого нужно провести диагональ, которая разделит фигуру на два тела. Затем провести в каждом треугольном теле три медианы. Точка их пересечения и будет ЦМ. В результате вместо четырёхугольника можно рассматривать две материальные точки.
Несмотря на то что масса у них разная ЦМ будет находиться на соединяющем их отрезке. Теперь четырёхугольник можно разбить на два других треугольника и выполнить аналогичные действия уже для них. Получится два отрезка, на которых одновременно расположен ЦМ. Значит, его положение будет определяться точкой их пересечения.
Для более сложной фигуры, например, шести или восьмиугольника можно использовать такой же подход. Сначала нужно разделить тело на прямоугольники, а затем треугольники. Найти ЦМ для полученных фигур и определить точку пересечения. Следует понимать, что ЦМ может находиться и за пределами объекта.
Но в реальных ситуациях бывают фигуры, которые имеют неправильную форму. Для них нельзя применить расчёт или геометрический метод. Поэтому выясняют, где расположен ЦМ экспериментальным путём.
Например, пусть имеется тело сложной неправильной формы. Чтобы найти ЦМ необходимо фигуру подвесить в пространстве. На неё действует две силы: тяжести и реакции оси. Первая заставляет фигуру поворачиваться с определённой скоростью до тех пор, пока момент силы тяжести относительно оси крепления не станет равным нулю. То есть точка опоры, ось и центр тяжести окажутся на одной вертикале.
Чтобы узнать, где же находится ЦМ, тело нужно подвесить, используя другую точку. При этом на самой фигуре следует отметить, как проходит вертикаль.
Повторяя такой опыт минимум три раза, можно увидеть точку пересечения осей, которая и будет искомым ЦМ. Причём чем будет больше экспериментов, тем точнее он будет определён.
Содержание:
Центр тяжести:
При рассмотрении движения тел, особенно таких, как самолеты, ракеты, космические корабли, важное значение имеет понятие центра тяжести.
Определения и формулы для вычисления центров тяжести
Для введения понятия центра тяжести разобьем мысленно рассматриваемое тело на достаточно большое число малых по сравнению с телом или элементарных его частей произвольной формы. Силу тяжести элементарной частицы тела с индексом 
Радиус-вектор центра тяжести тела  вычисляем как радиус-вектор центра параллельных сил (рис. 88) по формуле
вычисляем как радиус-вектор центра параллельных сил (рис. 88) по формуле
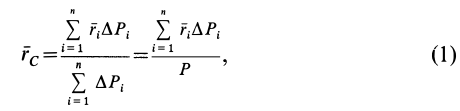
где  — радиус-вектор точки приложения силы тяжести элементарной части тела, принятой за точку;
— радиус-вектор точки приложения силы тяжести элементарной части тела, принятой за точку;  — сила тяжести элементарной частицы;
— сила тяжести элементарной частицы;  — сила тяжести всего тела;
— сила тяжести всего тела;  — число частей, на которое мысленно разбито все тело. Центр тяжести является точкой приложения равнодействующей силы тяжести, если силы тяжести отдельных его частей считать системой параллельных сил.
— число частей, на которое мысленно разбито все тело. Центр тяжести является точкой приложения равнодействующей силы тяжести, если силы тяжести отдельных его частей считать системой параллельных сил.
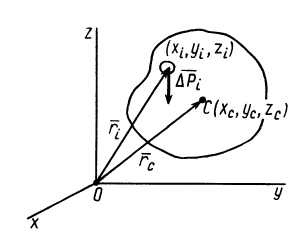
Рис. 88
Если в (1) перейти к пределу, увеличивая число элементарных частей до бесконечности, то после замены дифференциалом  , а суммы — интегралом получим
, а суммы — интегралом получим

где  — радиус-вектор элементарной части тела, принятой за точку. В проекциях на оси координат из (1) и (1′) получаем:
— радиус-вектор элементарной части тела, принятой за точку. В проекциях на оси координат из (1) и (1′) получаем:
где  — координаты центра тяжести;
— координаты центра тяжести;  — координаты точки приложения силы тяжести
— координаты точки приложения силы тяжести  .
.
Используя понятие центра тяжести тела, введем понятие его центра масс. Силы тяжести элементарных частей тела и всего тела можно выразить через их массы  и
и  и ускорение силы тяжести
и ускорение силы тяжести  с помощью формул
с помощью формул

Подставляя эти значения сил тяжести в (1) и (1′) после сокращения на , которое принимаем одинаковым для всех частей тела, имеем

и соответственно

По формулам (2) и (2′) определяют радиус-вектор центра масс тела. Центр масс обычно определяют независимо от центра тяжести как геометрическую точку, радиус-вектор, которой вычисляется по формулам (2) или (2′). В проекциях на оси координат из (2) и (2′) получаем:

и

где  — координаты центра масс тела.
— координаты центра масс тела.
Для однородного тела силу тяжести элементарной частицы тела и ее массу можно вычислить по формулам

где  — объем элементарной частицы тела;
— объем элементарной частицы тела;  и
и  — соответственно удельный вес и плотность тела. Сила тяжести и масса всего тела
— соответственно удельный вес и плотность тела. Сила тяжести и масса всего тела

где  — объем тела. Подставляя эти значения в (2) и (2′), после сокращения на и соответственно получим формулы
— объем тела. Подставляя эти значения в (2) и (2′), после сокращения на и соответственно получим формулы
по которым определяют центр тяжести объема тела.
Если тело имеет форму поверхности, т. е. один из размеров мал по сравнению с двумя другими, как, например, у тонкого листа железа, то имеем

где  — удельный вес;
— удельный вес;  — площадь элементарной частицы поверхности;
— площадь элементарной частицы поверхности;  — площадь всей поверхности. После сокращения на
— площадь всей поверхности. После сокращения на  для однородной поверхности получим следующие формулы для определения центра тяжести ее площади:
для однородной поверхности получим следующие формулы для определения центра тяжести ее площади:
Для однородных тел типа проволоки, у которых два размера малы по сравнению с третьим, можно определить радиус-вектор центра тяжести длины линии по формулам
где  — длина элемента линии;
— длина элемента линии;  —общая длина линии, центр тяжести которой определяется.
—общая длина линии, центр тяжести которой определяется.
Методы определения центров тяжести (Центров масс)
Метод симметрии
При определении центров тяжести широко используется симметрия тел. Докажем, что для однородного тела, имеющего плоскость симметрии, центр тяжести находится в плоскости симметрии. Для доказательства выберем начало координат в плоскости симметрии тела и одну из осей координат, ось  направим перпендикулярно плоскости симметрии, а две других оси расположатся в плоскости симметрии (рис. 89). Каждая частица массой
направим перпендикулярно плоскости симметрии, а две других оси расположатся в плоскости симметрии (рис. 89). Каждая частица массой  , находясь по одну сторону плоскости симметрии, имеет симметричную частицу такой же массы по другую сторону этой плоскости. Координаты
, находясь по одну сторону плоскости симметрии, имеет симметричную частицу такой же массы по другую сторону этой плоскости. Координаты  у симметричных частиц одинаковы при сделанном выборе осей координат, а координаты по оси
у симметричных частиц одинаковы при сделанном выборе осей координат, а координаты по оси  отличаются только знаком. Для координаты центра масс
отличаются только знаком. Для координаты центра масс  имеем следующее выражение:
имеем следующее выражение:
Разбивая сумму в числителе на две по симметричным частям тела, получаем, что
так как симметричные части тела 1 и 2 одинаковы.
Таким образом, центр масс расположен в плоскости симметрии и для его определения достаточно вычислить только две его координаты  и
и  в этой плоскости.
в этой плоскости.
Аналогично доказывается, что для однородного тела, имеющего ось или центр симметрии, центр масс находится соответственно на оси симметрии или в центре симметрии.
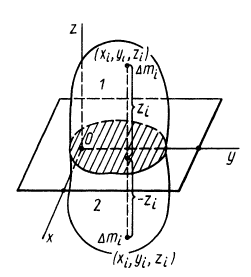
Рис. 89
Метод разбиения на части (метод группировки)
Некоторые тела сложной формы можно разбить на части, центры тяжести которых известны или предварительно могут быть определены. В таких случаях центры тяжести сложных тел вычисляются по общим формулам, определяющим центр тяжести, только вместо элементарных частиц тела берутся его конечные части, на которые оно разбито. Покажем это на частном примере плоской фигуры, изображенной на рис. 90. Плоскую фигуру можно разбить на три части, центры тяжести которых  ,
,  и
и  известны. Они находятся на пересечении диагоналей прямоугольников. Их радиусы-векторы обозначим
известны. Они находятся на пересечении диагоналей прямоугольников. Их радиусы-векторы обозначим  и площади
и площади  . Общая площадь сложной фигуры будет
. Общая площадь сложной фигуры будет  .
.
Используя определение центра тяжести и производя группировку слагаемых под знаком суммы по частям фигуры, на которые она разбита, получим

Радиусы-векторы центров тяжести частей тела выразятся в такой форме:

или

Используя эти формулы для радиуса-вектора всей фигуры, имеем

Полученная формула имеет ту же структуру, что и формула, определяющая радиус-вектор центра тяжести тела при разбиении его на элементарные частицы, только в нее входят величины для конечных частей тела.
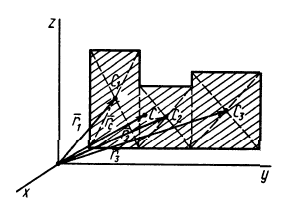
Рис. 90
Метод отрицательных масс
Видоизменением метода разбиения на части является метод отрицательных масс. Проиллюстрируем его тоже на примере плоской фигуры (рис. 91). Для определения центра тяжести этой фигуры ее можно разбить на три части. Можно поступить по-другому. Для этого дополним нашу фигуру до прямоугольника и примем, что этот прямоугольник с площадью  и центром масс
и центром масс  полностью заполнен массой (имеет положительную площадь). На той части фигуры, которую добавили, следует распределить отрицательную массу (отрицательную площадь) той же плотности. Площадь этой фигуры с отрицательной массой обозначим
полностью заполнен массой (имеет положительную площадь). На той части фигуры, которую добавили, следует распределить отрицательную массу (отрицательную площадь) той же плотности. Площадь этой фигуры с отрицательной массой обозначим  , а ее центр масс —
, а ее центр масс —  . Применяя метод разбиения на части, радиус-вектор заданной фигуры определим по формуле
. Применяя метод разбиения на части, радиус-вектор заданной фигуры определим по формуле

В отличие от обычного метода разбиения на части в формуле (4) массы и, следовательно, площади входят со знаком минус.
Метод отрицательных масс особенно удобен при вычислении положения центров тяжести тел, имеющих отверстия.
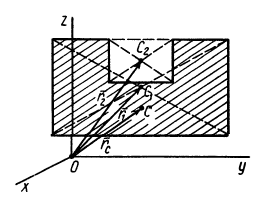
Рис. 91
Центры тяжести простейших тел
Для определения центров тяжести тел сложной формы методом разбиения на части или методом отрицательных масс необходимо уметь вычислять центры тяжести простейших тел, на которые разбивается тело сложной формы. Рассмотрим некоторые из тел, для определения центров тяжести которых известны простые способы их нахождения или вычисления по формулам.
Прямолинейный отрезок
Центр тяжести прямолинейного однородного отрезка располагается на его середине, а неоднородного— на самом отрезке и не может находиться вне отрезка.
Площадь треугольника
Для определения центра тяжести площади треугольника разобьем его прямыми линиями, параллельными одной из его сторон  , на полоски, которые в пределе можно принять за прямолинейные отрезки (рис. 92). Центры тяжести отрезков и, следовательно, полосок находятся посередине полоски. Все они расположатся на медиане
, на полоски, которые в пределе можно принять за прямолинейные отрезки (рис. 92). Центры тяжести отрезков и, следовательно, полосок находятся посередине полоски. Все они расположатся на медиане  . В пределе центры тяжести полосок непрерывно покроют медиану, но не равномерно, так как площади полосок разные. В каждом центре масс полоски следует считать сосредоточенной массу или площадь этой полоски, пропорциональную длине полоски, если ширину полосок выбирать одинаковой.
. В пределе центры тяжести полосок непрерывно покроют медиану, но не равномерно, так как площади полосок разные. В каждом центре масс полоски следует считать сосредоточенной массу или площадь этой полоски, пропорциональную длине полоски, если ширину полосок выбирать одинаковой.
Затем разобьем треугольник на полоски прямыми линиями, параллельными другой стороне  треугольника. Центры их тяжести в пределе покроют неравномерно медиану
треугольника. Центры их тяжести в пределе покроют неравномерно медиану  . Центры тяжести неоднородных прямолинейных отрезков и
. Центры тяжести неоднородных прямолинейных отрезков и  должны располагаться на этих отрезках, а следовательно, в точке их пересечения
должны располагаться на этих отрезках, а следовательно, в точке их пересечения  , являющейся точкой пересечения медиан треугольника. Эта точка делит медианы в отношении 1 к 2, т. е. если длина медианы равна
, являющейся точкой пересечения медиан треугольника. Эта точка делит медианы в отношении 1 к 2, т. е. если длина медианы равна  , то
, то 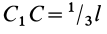 ,
,  .
.
Рис. 92
Дуга окружности
Дуга окружности определяется радиусом  и стягиваемым ею центральным углом
и стягиваемым ею центральным углом  (рис. 93). Она имеет ось симметрии, делящую угол пополам. Центр тяжести находится на оси симметрии дуги, которую примем за ось координат
(рис. 93). Она имеет ось симметрии, делящую угол пополам. Центр тяжести находится на оси симметрии дуги, которую примем за ось координат  . Координату центра тяжести дуги вычисляем по формуле
. Координату центра тяжести дуги вычисляем по формуле
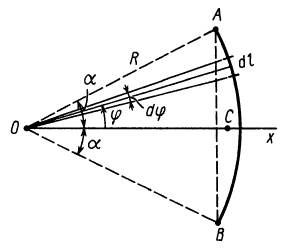
Рис. 93
В рассматриваемом случае

Подставляя эти значения в формулу для  , получим
, получим
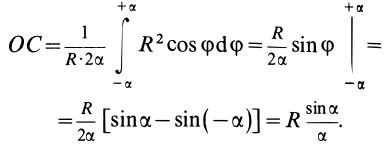
Таким образом,

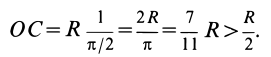
Для полуокружности  . Приняв
. Приняв  , получим:
, получим:
Площадь кругового сектора
Центр тяжести площади кругового сектора с радиусом  и центральным углом
и центральным углом  находится на оси симметрии, принимаемой за ось
находится на оси симметрии, принимаемой за ось  (рис. 94). Разобьем сектор на элементарные треугольники одинаковой величины. Центры тяжести треугольников в пределе при увеличении их числа до бесконечности равномерно покроют дугу окружности радиусом
(рис. 94). Разобьем сектор на элементарные треугольники одинаковой величины. Центры тяжести треугольников в пределе при увеличении их числа до бесконечности равномерно покроют дугу окружности радиусом  .
.
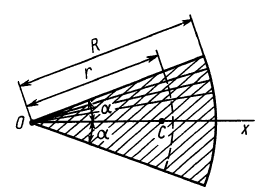
Рис. 94
Используя формулу для центра тяжести дуги окружности, получим
или

Для площади полукруга  ,
,  . При
. При  получим
получим
Объем пирамиды и конуса
Определим положение центра тяжести объема конуса (рис. 95). Для простоты рассмотрим прямой конус, у которого высота является осью симметрии. Высотой конуса является отрезок, соединяющий его вершину  с центром тяжести площади основания
с центром тяжести площади основания  . Выберем начало координат в вершине конуса, а ось
. Выберем начало координат в вершине конуса, а ось  направим по оси симметрии конуса. Тогда центр тяжести объема конуса расположится на оси
направим по оси симметрии конуса. Тогда центр тяжести объема конуса расположится на оси  .
.
Разобьем конус плоскостями, перпендикулярными оси  , на элементарные тонкие диски толщиной
, на элементарные тонкие диски толщиной  и площадью
и площадью  . Все полученные сечения (диски) конуса подобны его основанию. Координату
. Все полученные сечения (диски) конуса подобны его основанию. Координату  центра тяжести объема конуса вычислим по формуле
центра тяжести объема конуса вычислим по формуле
Отношения линейных размеров сечений к соответствующим размерам основания конуса пропорциональны их расстояниям до вершины конуса. Отношения площадей пропорциональны квадратам расстояний. Приняв  , получим
, получим
Учитывая, что
имеем
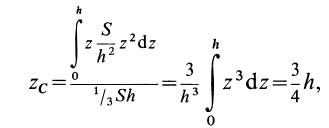
или

Таким образом, центр тяжести прямого конуса находится на расстоянии  от вершины или
от вершины или  от основания.
от основания.
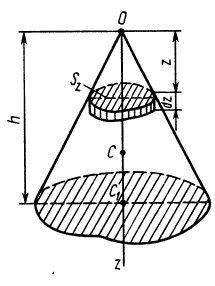
Рис. 95
Это справедливо для объема любого конуса и любой пирамиды, как прямых, так и наклонных, т. е. центр тяжести объема пирамиды или конуса находится на расстоянии  расстояния от центра тяжести площади основания до вершины.
расстояния от центра тяжести площади основания до вершины.
Объем полушара
Полушар имеет ось симметрии, которую примем за координатную ось  (рис. 96). Разобьем объем полушара на элементарные диски толщиной dx и радиусом у, который является координатой точки окружности, которая получилась от пересечения полушара с координатной плоскостью
(рис. 96). Разобьем объем полушара на элементарные диски толщиной dx и радиусом у, который является координатой точки окружности, которая получилась от пересечения полушара с координатной плоскостью  . Уравнение этой окружности
. Уравнение этой окружности
где  — радиус полушара. Для координаты центра тяжести объема полушара имеем
— радиус полушара. Для координаты центра тяжести объема полушара имеем
где  — координата центра тяжести элементарного диска. Объем полушара
— координата центра тяжести элементарного диска. Объем полушара
Объем элементарного диска

так как радиус диска  . Выполняя интегрирование в пределах от
. Выполняя интегрирование в пределах от  до
до  , получим
, получим
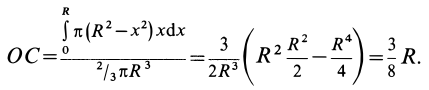
Таким образом, центр тяжести объема полушара находится от его центра на расстоянии

Это расстояние меньше половины радиуса полушара.
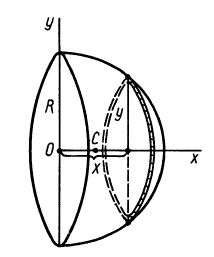
Рис. 96
Задача №1
Определить координаты центра тяжести площади плоской фигуры, имеющей размеры, указанные на рис. 97.
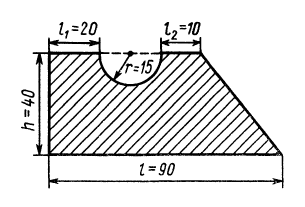
Рис.97
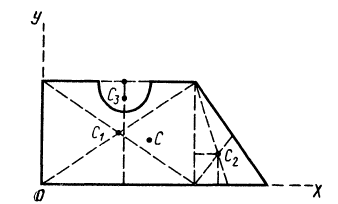
Рис. 98
Решение. Присоединим к заданной фигуре дополнительно полукруг 3 и разобьем полученную фигуру на прямоугольник 1 и треугольник 2. Получили три фигуры, две из которых имеют положительные площади (прямоугольник 1 и треугольник 2) и одна — отрицательную (полукруг 3). В выбранной системе координат для координат центра тяжести заданной фигуры имеем

где  — координаты центров тяжести отдельных фигур;
— координаты центров тяжести отдельных фигур;  — площади этих фигур.
— площади этих фигур.
Вычислим площади и координаты центров тяжести отдельных фигур, учитывая рис. 98 Имеем:
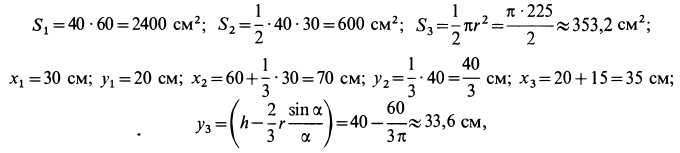
так как  .
.
Подставляя полученные значения в (а), получим:
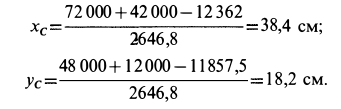
Центр тяжести плоской фигуры
постановка задачи. Найти площадь и координаты центра тяжести плоской фигуры.
План решения:
1. Разбиваем фигуру на простые отдельные части, положение центров тяжести которых известны.
2. Выбираем систему координат. Вычисляем площади и координаты  центров тяжести отдельных частей. Площади вырезанных частей берем со знаком минус.
центров тяжести отдельных частей. Площади вырезанных частей берем со знаком минус.
3. Находим общую площадь фигуры по формуле 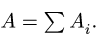
4. Определяем координаты центра тяжести фигуры:
Задача №2
Найти площадь и координаты центра тяжести плоской фигуры. Криволинейный участок контура является половиной окружности с центром на оси Ох (рис. 74). Размеры на рисунке даны 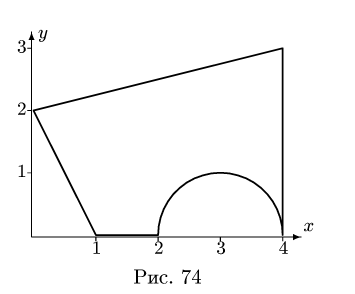
Решение
1. Разбиваем фигуру на простые отдельные части, положение центров тяжести которых известны.
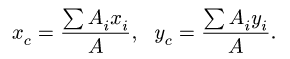
Центр тяжести прямоугольника находится в его геометрическом центре, положение центра тяжести других фигур, встречающихся в задачах, изображено на рис. 75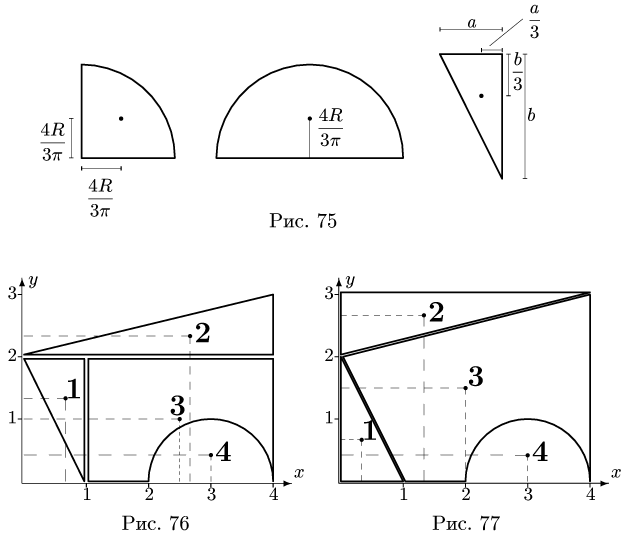
Представляем фигуру в виде двух треугольников 1,2, прямоугольника 3 и выреза 4 в виде полукруга (рис. 76).
2. Вычисляем площадь (в  ) и координаты центра тяжести (в м) каждого элемента:
) и координаты центра тяжести (в м) каждого элемента: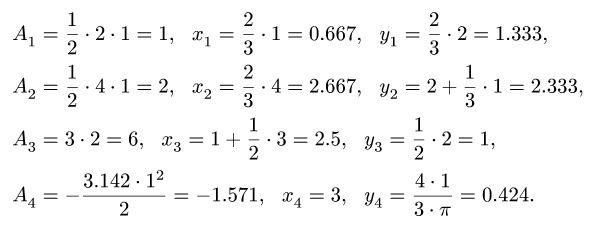
Площадь выреза берем со знаком минус.
3.Площадь фигуры 
4. Находим координаты центра тяжести всей фигуры:

Вычисления удобно свести в таблицу: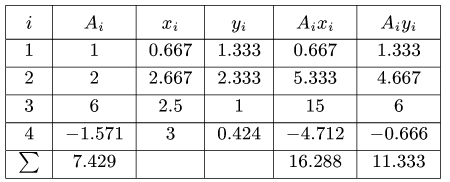
Сначала заполняем столбцы  затем вычисляем статические моменты
затем вычисляем статические моменты  Внизу записываем суммы столбцов, необходимые для вычисления координат центра тяжести. Таким образом
Внизу записываем суммы столбцов, необходимые для вычисления координат центра тяжести. Таким образом

Замечание 1. Большинство задач на определение центра тяжести допускает несколько способов разбиения фигуры. Это можно использовать для проверки решения. Второй вариант разбиения фигуры в данном примере состоит из прямоугольника 3 с размерами  и вырезанных из него полукруга 4 и двух треугольников 1 и 2 (рис. 77).
и вырезанных из него полукруга 4 и двух треугольников 1 и 2 (рис. 77).
Замечание 2. Решение задачи в системе Maple V методом контурного интегрирования.
- Заказать решение задач по теоретической механике
Пространственная стержневая система
Постановка Задачи. Найти координаты центра тяжести пространственной фигуры, состоящей из N однородных стержней.
План решения:
1. Разбиваем фигуру на отдельные стержни.
2. Выбираем систему координат. Вычисляем длины и координаты  центров тяжести отдельных стержней. Координаты центра прямолинейного однородного стержня вычисляем как полусумму координат его концов.
центров тяжести отдельных стержней. Координаты центра прямолинейного однородного стержня вычисляем как полусумму координат его концов.
3. Находим суммарную длину стержней системы 
4. Определяем координаты центра тяжести тела по формулам

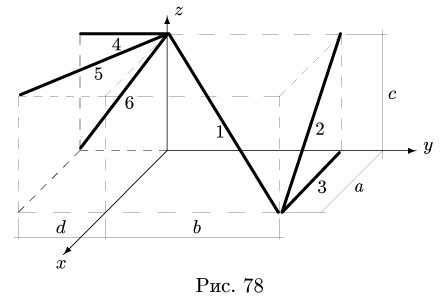
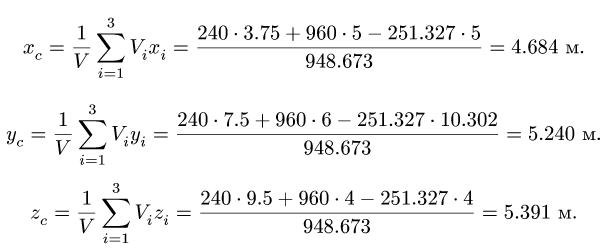
Задача №3
Найти координаты центра тяжести пространственной фигуры, состоящей из шести однородных стержней (рис. 78). Даны размеры:
Решение
1. Разбиваем фигуру на шесть стержней.
2. Выбираем систему координат (рис. 78). Вычисляем длины и координаты  центров тяжести отдельных стержней.
центров тяжести отдельных стержней.
3. Находим суммарную длину стержней системы:
Промежуточные результаты удобно занести в таблицу:
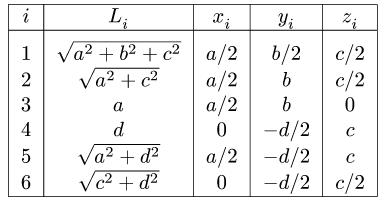
4. Определяем координаты центра тяжести тела по формулам
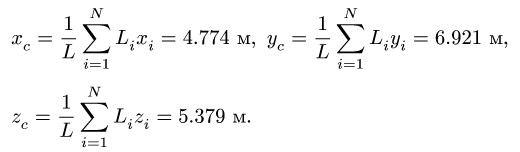
Постановка задачи. Найти координаты центра тяжести однородного объемного тела.
План решения:
1. Разбиваем тело на простые части, положение центров тяжести которых известно.
2. Выбираем систему координат. Вычисляем объемы  и координаты
и координаты  центров тяжести отдельных частей. Объемы вырезанных частей берем со знаком минус.
центров тяжести отдельных частей. Объемы вырезанных частей берем со знаком минус.
3. Находим общий объем тела по формуле 
4. Определяем координаты центра тяжести тела:

Задача №4
Найти координаты центра тяжести однородного объемного тела (рис.79);
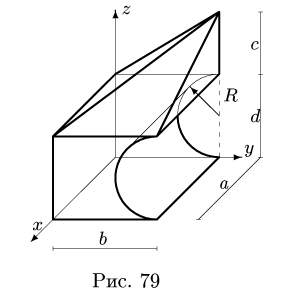
Решение
1. Разбиваем тело на пирамиду 1, параллелепипед 2 и половину цилиндра 3 (рис. 80).
2. Выбираем систему координат. Вычисляем объемы  и координаты
и координаты  центров тяжестей отдельных частей. Центр тяжести пирамиды 1 лежит в точке
центров тяжестей отдельных частей. Центр тяжести пирамиды 1 лежит в точке 

Центр тяжести параллелепипеда 2 совпадает с его геометрическим центром:

Объем половины цилиндра 3 берем со знаком минус:

где 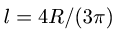 — расстояние по оси у от оси цилиндра до его центра тяжести
— расстояние по оси у от оси цилиндра до его центра тяжести  .
.
3. Находим общий объем тела:

 В общем случае объем тела, лежащего в области
В общем случае объем тела, лежащего в области  можно найти, вычисляя тройной интеграл по области
можно найти, вычисляя тройной интеграл по области  а координаты центра тяжести, например,
а координаты центра тяжести, например,  однородного тела можно определить по формуле
однородного тела можно определить по формуле  см.
см.
4. Определяем координаты центра тяжести тела:
Центр тяжести
Центр тяжести — точка, через которую проходит линия действия равнодействующей элементарных сил тяжести. Он обладает свойством центра параллельных сил. Поэтому формулы для определения положения центра тяжести различных тел имеют вид:
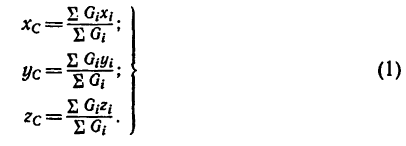
Если тело, центр тяжести которого нужно определить, можно отождествить с фигурой, составленной из линий (например, замкнутый или незамкнутый контур, изготовленный из проволоки, как на рис. 173), то вес  каждого отрезка
каждого отрезка  можно представить в виде произведения
можно представить в виде произведения
где d — постоянный для всей фигуры вес единицы длины материала.
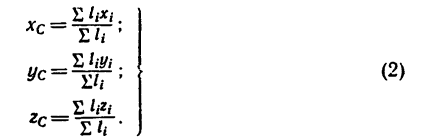
После подстановки в формулы (1) вместо  их значений
их значений  постоянный множитель d в каждом слагаемом числителя и знаменателя можно вынести за скобки (за знак суммы) и сократить. Таким образом, формулы для определения координат центра тяжести фигуры, составленной из отрезков линий, примут вид:
постоянный множитель d в каждом слагаемом числителя и знаменателя можно вынести за скобки (за знак суммы) и сократить. Таким образом, формулы для определения координат центра тяжести фигуры, составленной из отрезков линий, примут вид:
Если тело имеет вид фигуры, составленной из расположенных различным образом плоскостей или кривых поверхностей (рис. 174),
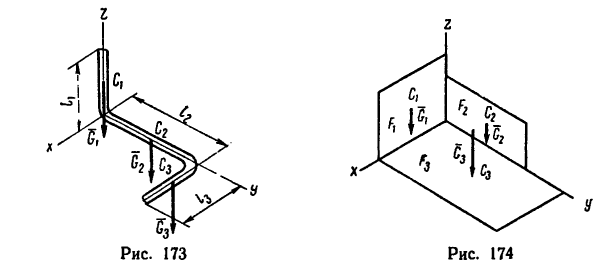
то вес каждой плоскости (поверхности) можно представить так:

где  — площади каждой поверхности, ар — вес единицы площади фигуры.
— площади каждой поверхности, ар — вес единицы площади фигуры.
После подстановки этого значения в формулы (1) получаем формулы координат центра тяжести фигуры, составленной из площадей:
в формулы (1) получаем формулы координат центра тяжести фигуры, составленной из площадей:
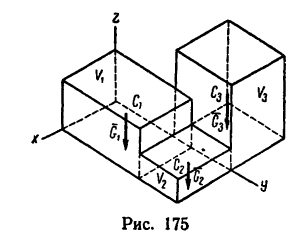
Если же однородное тело можно разделить на простые части определенной геометрической формы (рис. 175), то вес каждой части

где  — объем каждой части, а у — вес единицы объема тела.
— объем каждой части, а у — вес единицы объема тела.
После подстановки значений  в формулы (I) получаем формулы для определения координат центра тяжести тела, составленного из однородных объемов;
в формулы (I) получаем формулы для определения координат центра тяжести тела, составленного из однородных объемов;
При решении некоторых задач на определение положения центра тяжести тел иногда необходимо знать, где расположен центр тяжести дуги окружности, кругового сектора или треугольника.
Если известен радиус дуги г и центральный угол 2а, стягиваемый дугой и выраженный в радианах, то положение центра тяжести С (рис. 176, а) относительно центра дуги О определится формулой

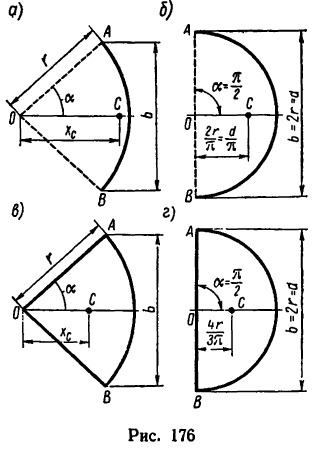
Если же задана хорда  дуги, то в формуле (5) можно произвести замену
дуги, то в формуле (5) можно произвести замену
и тогда

В частном случае для полуокружности обе формулы примут вид (рис. 176, б)
Положение центра тяжести кругового сектора, если задан его радиус r (рис. 176, в), определяется при помощи формулы

Если же задана хорда сектора, то

В частном случае для полукруга обе последние формулы примут вид (рис. 176, г)

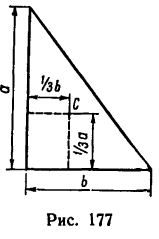
Центр тяжести площади любого треугольника расположен от любой стороны на расстоянии, равном одной трети соответствующей высоты.
У прямоугольного треугольника центр тяжести находится на пересечении перпендикуляров, восставленных к катетам из точек, расположенных на расстоянии одной трети длины катетов, считая от вершины прямого угла (рис. 177).
При решении задач на определение положения центра тяжести любого однородного тела, й составленного либо из тонких стержней (линий), либо из пластинок (площадей), либо из объемов, целесообразно придерживаться следующего порядка:
- выполнить рисунок тела, положение центра тяжести которого нужно определить. Так как все размеры тела обычно известны, при этом следует соблюдать масштаб;
- разбить тело на составные части (отрезки линий или площади, или объемы), положение центров тяжести которых определяется исходя из размеров тела;
- определить или длины, или площади, или объемы составных частей;
- выбрать расположение осей координат;
- определить координаты центров тяжести составных частей;
- найденные значения длин или площадей, или объемов отдельных частей, а также координат их центров тяжести подставить в соответствующие формулы и вычислить координаты центра тяжести всего тела;
- по найденным координатам указать на рисунке положение центра тяжести тела.
- Кинематика точки
- Плоское движение твердого тела
- Мгновенный центр скоростей
- Мгновенный центр ускорений
- Условия равновесия системы сил
- Плоская система сил
- Трение
- Пространственная система сил
Механические и физические приложения поверхностного интеграла первого рода
Масса поверхности
Пусть на поверхности $sigma $ распределена масса с поверхностной плотностью $mu (mathbf { textit { x } } $,$mathbf { textit { y } } $,$mathbf { textit { z } } )$. Тогда масса $mathbf { textit { m } } $ поверхности равна
$mathbf { textit { m } } =iintlimits_sigma { mu (x,y,z)dsigma } $.
Статические моменты и центр масс
Статические моменты поверхности относительно координатных плоскостей $mathbf { textit { OYZ } } $, $mathbf { textit { OXZ } } $, $mathbf { textit { OXY } } $ равны соответственно $M_ { yz } =iintlimits_sigma { xmu dsigma } , M_ { xz } =iintlimits_sigma { ymu dsigma } , M_ { xy } =iintlimits_sigma { zmu dsigma } $
Координаты центра масс поверхности
$sigma $ равны $mathbf { textit { x } } _ { c } =frac { M_ { yz } } { m } $, $mathbf { textit { y } } _ { c } =frac { M_ { xz } } { m } $, $mathbf { textit { z } } _ { c } =frac { M_ { xy } } { m } $.
Моменты инерции
Момент инерции поверхности $sigma $ относительно прямой $mathbf { textit { L } } $ равен $mathbf { textit { I } } _ { L } =iintlimits_sigma { r_L^2 mu dsigma } $, где $r_L =mathbf { textit { r } } _ { L } (mathbf { textit { x } } ,mathbf { textit { y } } ,mathbf { textit { z } } )$ — расстояние от точки { $mathbf { textit { x } } ,mathbf { textit { y } } ,mathbf { textit { z } } $ } , лежащей на поверхности $sigma $, до прямой $mathbf { textit { L } } $. В частности, моменты инерции относительно координатных осей $mathbf { textit { OX } } ,mathbf { textit { OY } } $, $mathbf { textit { OZ } } $ равны
$I_x =iintlimits_sigma { (y^2+z^2)mu dsigma } $,
$I_y =iintlimits_sigma { (x^2+z^2)mu dsigma } $,
$I_z =iintlimits_sigma { (x^2+y^2)mu dsigma } $.
Момент инерции относительно точки $mathbf { textit { P } } (mathbf { textit { x } } _ { 0 } $,$mathbf { textit { y } } _ { 0 } $,$mathbf { textit { z } } _ { 0 } )$ равен $ I_p =iintlimits_sigma { ((x-x_0 )^2+(y-y_0 )^2+(z-z_0 )^2)mu (x,y,z)dsigma } $
Момент инерции относительно начала координат равен $ I_0 =iintlimits_sigma { (x^2+y^2+z^2)mu (x,y,z)dsigma =frac { 1 } { 2 } (I_x +I_y +I_z ). } $
Пример 1
Найти координаты центра масс полусферы $mathbf { textit { x } } ^ { 2 } +mathbf { textit { y } } ^ { 2 } +mathbf { textit { z } } ^ { 2 } =mathbf { textit { R } } ^ { 2 } ,mathbf { textit { z } } leqslant 0$, если поверхностная плотность в каждой точке сферы равна расстоянию от этой точки до оси $mathbf { textit { OZ } } $.
Решение
Масса полусферы $sigma $ равна
$ begin{array} { l } M=iintlimits_sigma { mu dsigma =iintlimits_sigma { sqrt { x^2+y^2 } dsigma = } } iintlimits_ { x^2+y^2leqslant R^2 } { sqrt { x^2+y^2 } cdot sqrt { 1+((sqrt { R^2-x^2-y^2 } { ) } ‘_x )^2+((sqrt { R^2-x^2-y^2 } { ) } ‘_y )^2 } } dxdy= \ =iintlimits_ { x^2+y^2leqslant R^2 } { sqrt { x^2+y^2 } cdot sqrt { 1+frac { x^2+y^2 } { R^2-x^2-y^2 } } dxdy= } iintlimits_ { x^2+y^2leqslant R^2 } { sqrt { x^2+y^2 } cdot frac { Rdxdy } { sqrt { R^2-x^2-y^2 } } =Rintlimits_0^ { 2pi } { dvarphi } intlimits_0^R { frac { r^2dr } { sqrt { R^2-r^2 } } = } } \ =2pi Rintlimits_0^R { frac { r^2-R^2+R^2 } { sqrt { R^2-r^2 } } dr=2pi Rleft( { R^2arcsin left. { frac { r } { R } }right|_0^R -intlimits_0^R { sqrt { R^2-r^2 } } dr }right)=frac { pi ^2R^3 } { 2 } . } \ end{array} $
{ Мы воспользовались тем, что интеграл $intlimits_0^R { sqrt { R^2-r^2 } dr } $ равен четверти площади круга радиуса $mathbf { textit { R } } $ , т.е. $frac { pi R^2 } { 4 } $ } .
Пример 2
Найти массу поверхности $G:left { { { begin{array} { * { 20 } c } { x^2+y^2+z^2=16 } hfill \ { ygeqslant 0 } hfill \ { 0leqslant zleqslant 3 } hfill \ end{array} } }right.$ с поверхностной плотностью $gamma = 2z^ { 2 } + 3$.
Решение
На рассматриваемой поверхности $z=sqrt { 16-x^2-y^2 } $,
$frac { partial z } { partial x } =-frac { x } { sqrt { 16-x^2-y^2 } } ,frac { partial z } { partial y } =-frac { y } { sqrt { 16-x^2-y^2 } } .$ Тогда
$ dS=sqrt { 1+frac { x^2 } { 16-x^2-y^2 } +frac { x^2 } { 16-x^2-y^2 } } dxdy=frac { 4 } { sqrt { 16-x^2-y^2 } } dxdy. $
Проекцией $D$ этой поверхности на координатную плоскость $Oxy$ является полукольцо с границами в виде дуг концентрических окружностей радиусов 3 и 4.
Применяя формулу массы поверхности и перехода к полярным координатам, получим:
$ begin{array} { c } M=4iintlimits_D { frac { 2(16-x^2-y^2)+3 } { sqrt { 16-x^2-y^2 } } } dxdy=4intlimits_0^pi { dvarphi } intlimits_3^4 { frac { 2(16-rho ^2)+3 } { sqrt { 16-rho ^2 } } } rho drho = \ =4pi left( { -frac { 1 } { 2 } }right)intlimits_7^0 { frac { 2t+3 } { sqrt t } } dt=2pi intlimits_0^7 { left( { 2t^ { frac { 1 } { 2 } } +3t^ { -frac { 1 } { 2 } } }right) } dt=2pi left( { frac { 4 } { 3 } t^ { frac { 3 } { 2 } } +6t^ { frac { 1 } { 2 } } }right)left| { { begin{array} { * { 20 } c } { ^7 } hfill \ { _0 } hfill \ end{array} } }right.= \ =2pi left( { frac { 28 } { 3 } sqrt 7 +6sqrt 7 }right)=frac { 92sqrt 7 } { 3 } pi . \ end{array} $