13.
Аку́стика (от греч. ἀκούω (аку́о) —
слышу) — наука о звуке,
изучающая физическую природу звука и
проблемы, связанные с его возникновением,
распространением, восприятием и
воздействием. Акустика является одним
из направлений физики (механики),
исследующих упругие колебания и волны
от самых низких (условно от 0 Гц)
до высоких частот.[1]
Акустика
является междисциплинарной наукой,
использующей для решения своих проблем
широкий круг дисциплин: математику,
физику, психологию, архитектуру,
электронику, биологию, медицину, гигиену,
теорию музыки и другие.
Иногда
(в обиходе) под акустикой понимают
также акустическую
систему —
электрическое устройство,
предназначенное для преобразования тока переменной
частоты в звуковые колебания при помощи
электро-акустического преобразования.
Также термин акустика применим для
обозначения колебательных свойств,
связанных с качеством распространения
звука в какой-либо системе или каком-либо
помещении, например, «хорошая акустика
концертного зала».
Термин
«акустика» (фр. acoustique)
был введён в 1701
году Ж. Совёром[2].
Тон в лингвистике —
использование высоты
звука для
смыслоразличения в рамках слов/морфем.
Тон следует отличать от интонации,
то есть изменения высоты тона на
протяжении сравнительно большого
речевого отрезка (высказывания или
предложения). Различные тоновые единицы,
имеющие смыслоразличительную функцию,
могут называться тонемами (по
аналогии с фонемой).
Тон,
как и интонация, фонация и ударение,
относится к супрасегментным,
или просодическим,
признакам. Носителями тона чаще всего
являются гласные,
но встречаются языки, где в этой роли
могут выступать и согласные,
чаще всего сонанты.
Тоновым,
или тональным, называется язык, в котором
каждый слог произносится
с определённым тоном. Разновидностью
тоновых языков являются также языки
с музыкальным
ударением,
в которых один или несколько слогов в
слове являются выделенными, и разные
типы выделения противопоставляются
тоновыми признаками.
Тоновые
противопоставления могут сочетаться
с фонационными (таковы
многие языки Юго-Восточной
Азии).
Шум —
беспорядочные колебания различной
физической природы, отличающиеся
сложностью временной и спектральной структуры.
Первоначально слово шум относилось
исключительно к звуковым колебаниям,
однако в современной науке оно было
распространено и на другие виды колебаний
(радио-, электричество).
Шум —
совокупность апериодических звуков
различной интенсивности и частоты. С
физиологической точки зрения шум —
это всякий неблагоприятный
воспринимаемый звук.
Акустический,
звуковой удар — это
звук ассоциируемый с ударными волнами,
созданными сверхзвуковым полётом самолёта.
Акустический удар создаёт огромное
количество звуковой энергии, похожей
на взрыв.
Звук удара хлыста — наглядный пример
акустического удара.
Это момент, когда самолёт преодолевает
звуковой барьер, то, пробивая собственную
звуковую волну, он создаёт мощный
мгновенный большой силы звук,
распространяющийся
в стороны. Но на самом летящем самолёте
он не слышен, поскольку звук от него
«отстал». Звук напоминает выстрел
сверхмощной пушки, сотрясающий весь
небосвод и поэтому сверхзвуковым
самолётам рекомендовано переходить на
сверхзвук подальше от городов, чтобы
не беспокоить и не пугать граждан
Физические
параметры звука
Колебательная
скорость измеряется
в м/с или см/с. В энергетическом отношении
реальные колебательные системы
характеризуются изменением энергии
вследствие частичной её затраты на
работу против сил трения и излучение в
окружающее пространство. В упругой
среде колебания постепенно затухают.
Для характеристики затухающих
колебаний используются
коэффициент затухания (S), логарифмический
декремент (D) и добротность (Q).
Коэффициент
затухания отражает
быстроту убывания амплитуды с течением
времени. Если обозначить время, в течение
которого амплитуда уменьшается в е =
2,718 раза, через ![]() ,
,
то:
![]() .
.
Уменьшение
амплитуды за один цикл характеризуется
логарифмическим декрементом.
Логарифмический декремент равен
отношению периода колебаний ко времени
затухания ![]() :
:
![]()
Если
на колебательную систему с потерями
действовать периодической силой, то
возникают вынужденные
колебания,
характер которых в той или иной мере
повторяет изменения внешней силы.
Частота вынужденных колебаний не зависит
от параметров колебательной системы.
Напротив, амплитуда зависит от массы,
механического сопротивления и гибкости
системы. Такое явление, когда амплитуда
колебательной скорости достигает
максимального значения, называется
механическим резонансом. При этом
частота вынужденных колебаний совпадает
с частотой собственных незатухающих
колебаний механической системы.
При
частотах воздействия, значительно
меньших резонансной, внешняя гармоническая
сила уравновешивается практически
только силой упругости. При частотах
возбуждения, близких к резонансной,
главную роль играют силы трения. При
условии, когда частота внешнего
воздействия значительно больше
резонансной, поведение колебательной
системы зависит от силы инерции или
массы.
Свойство
среды проводить акустическую энергию,
в том числе и ультразвуковую, характеризуется
акустическим сопротивлением. Акустическое
сопротивление среды
выражается отношением звуковой плотности
к объёмной скорости ультразвуковых
волн. Удельное акустическое сопротивление
среды устанавливается соотношением
амплитуды звукового давления в среде
к амплитуде колебательной скорости её
частиц. Чем больше акустическое
сопротивление, тем выше степень сжатия
и разрежения среды при данной амплитуде
колебания частиц среды. Численно,
удельное акустическое сопротивление
среды (Z) находится как произведение
плотности среды (![]() )
)
на скорость (с) распространения в ней
ультразвуковых волн.
![]()
Удельное
акустическое сопротивление измеряется
в паскаль—секунда на метр (Па·с/м)
или дин•с/см³ (СГС); 1 Па·с/м = 10−1 дин
• с/см³.
Значение
удельного акустического сопротивления
среды часто выражается в г/с·см², причём
1 г/с·см² = 1 дин•с/см³. Акустическое
сопротивление среды определяется
поглощением, преломлением и отражением
ультразвуковых волн.
Звуковое или акустическое
давление в
среде представляет собой разность между
мгновенным значением давления в данной
точке среды при наличии звуковых
колебаний и статического давления в
той же точке при их отсутствии. Иными
словами, звуковое давление есть переменное
давление в среде, обусловленное
акустическими колебаниями. Максимальное
значение переменного акустического
давления (амплитуда давления) может
быть рассчитано через амплитуду колебания
частиц:
![]()
где
Р — максимальное акустическое
давление (амплитуда давления);
-
f —
частота; -
с —
скорость распространения ультразвука; -
 —
—
плотность
среды; -
А —
амплитуда колебания частиц среды.
На
расстоянии в половину длины волны (λ/2)
амплитудное значение давления из
положительного становится отрицательным,
то есть разница давлений в двух точках,
отстоящих друг от друга на λ/2 пути
распространения волны, равна 2Р.
Для
выражения звукового давления в единицах
СИ используется Паскаль (Па), равный
давлению в один ньютон на метр квадратный
(Н/м²). Звуковое давление в системе СГС
измеряется в дин/см²; 1 дин/см² = 10−1Па
= 10−1Н/м².
Наряду с указанными единицами часто
пользуются внесистемными единицами
давления — атмосфера (атм) и техническая
атмосфера (ат), при этом 1 ат = 0,98·106 дин/см²
= 0,98·105 Н/м².
Иногда применяется единица, называемая
баром или микробаром (акустическим
баром); 1 бар = 106 дин/см².
Давление,
оказываемое на частицы среды при
распространении волны, является
результатом действия упругих и инерционных
сил. Последние вызываются ускорениями,
величина которых также растёт в течение
периода от нуля до максимума (амплитудное
значение ускорения). Кроме того, в течение
периода ускорение меняет свой знак.
Максимальные
значения величин ускорения и давления,
возникающие в среде при прохождении в
ней ультразвуковых волн, для данной
частицы не совпадают во времени. В
момент, когда перепад ускорения достигает
своего максимума, перепад давления
становится равным нулю. Амплитудное
значение ускорения (а) определяется
выражением:
![]()
Если
бегущие ультразвуковые волны наталкиваются
на препятствие, оно испытывает не только
переменное давление, но и постоянное.
Возникающие при прохождении ультразвуковых
волн участки сгущения и разряжения
среды создают добавочные изменения
давления в среде по отношению к окружающему
её внешнему давлению. Такое добавочное
внешнее давление носит название давления
излучения (радиационного давления). Оно
служит причиной того, что при переходе
ультразвуковых волн через границу
жидкости с воздухом образуются фонтанчики
жидкости и происходит отрыв отдельных
капелек от поверхности. Этот механизм
нашёл применение в образовании аэрозолей
лекарственных веществ. Радиационное
давление часто используется при измерении
мощности ультразвуковых колебаний в
специальных измерителях — ультразвуковых
весах.
Интенсивность звука (абсолютная)
— величина, равная отношению потока
звуковой энергии dP через
поверхность, перпендикулярную направлению
распространения звука,
к площади dS этой
поверхности:
![]()
Единица
измерения — ватт на
квадратный метр (Вт/м2).
Для
плоской волны интенсивность звука может
быть выражена через амплитуду звукового
давления p0 и колебательную
скорость v:
![]() ,
,
где ZS — удельное
акустическое сопротивление среды.
Громкость
звука — субъективная характеристика,
котрорая зависит от амплитуды, а значит
от энергии звуковой волны. Чем больше
энергия, тем больше давление звуковой
волны.
Уровень
интенсивности — это объективная
характеристика звука.
Интенсивность
— отношение падающей на поверхности
звуковой мощности к площади этой
поверхности. Измеряется
в Вт/м2 (ватт
на кв. метр).
Уровень
интенсивности определяет во сколько
раз интенсивность звука больше, чем
минимальная интенсивность, воспринимаемая
человеческим ухом.
Поскольку
минимальная чувствительность,
воспринимаемая человеком
10-12 Вт/м2 отличается
от максимальной, вызывающей болевые
ощущения — 1013 Вт/м2,
на много порядков, то используется
логарифм отношения интенсивности звука
к минимальной интенсивности.

Здесь
k — уровень интенсивности, I — интенсивность
звука, I0 —
минимальная интенсивность звука,
воспринимаемая человеком или пороговая
интенсивность.
Смысл
логарифма в данной формуле — если
интенсивность I изменяется на порядок,
то уровень интенсивности при этом
изменяется на единицу.
Единица
измерения уровня интенсивности — 1 Б
(Белл). 1 Белл — уровень интенсивности,
которая в 10 раз превышает пороговую.
На
практике уровень интенсивности
измеряетсяв дБ (дециБеллах). Тогда
формула для вычисления уровня интенсивности
переписывается так:

Звуково́е
давле́ние —
переменное избыточное давление,
возникающее в упругой среде при
прохождении через неё звуковой
волны.
Единица измерения — паскаль (Па).
Мгновенное
значение звукового давления в точке
среды изменяется как со временем, так
и при переходе к другим точкам среды,
поэтому практический интерес представляет
среднеквадратичное значение данной
величины, связанное с интенсивностью
звука:
![]()
где ![]() — интенсивность
— интенсивность
звука, ![]() —
—
звуковое давление, ![]() — удельное
— удельное
акустическое сопротивление среды, ![]() —
—
усреднение по времени.
При
рассмотрении периодических колебаний
иногда используют амплитуду звукового
давления; так, для синусоидальной волны
![]()
![]()
где ![]() —
—
амплитуда звукового давления.
Уровень
звукового давления (англ. SPL,
Sound Pressure Level) —
измеренное по относительной
шкале значение
звукового давления, отнесённое к опорному
давлению ![]() =
=
20 мкПа, соответствующему
порогу слышимости синусоидальной звуковой
волны частотой 1
кГц:
![]() дБ.
дБ.
14.
Гро́мкость
зву́ка —
субъективное восприятие силы звука (абсолютная
величина слухового ощущения). Громкость
главным образом зависит от звукового
давления, амплитуды и частоты звуковых
колебаний. Также на громкость звука
влияют его спектральный состав,
локализация в пространстве, тембр,
длительность воздействия звуковых
колебаний и другие факторы (см. [1], [2]).
Единицей
абсолютной шкалы громкости является фон.
Громкость в 1 фон — это громкость
непрерывного чистого синусоидального
тона частотой 1 кГц,
создающего звуковое
давление 2 мПа.
Уровень
громкости звука —
относительная величина. Она выражается
в фонах и
численно равна уровню звукового
давления (в децибелах —
дБ), создаваемого синусоидальным тоном
частотой 1 кГц такой
же громкости, как и измеряемый звук
(равногромким данному звуку).

![]()
Зависимость
уровня громкости от звукового давления
и частоты
На
рисунке справа изображено семейство
кривых равной громкости, называемых
также изофонами.
Они представляют собой графики
стандартизированных (международный
стандарт ISO
226)
зависимостей уровня звукового давления
от частоты при заданном уровне громкости.
С помощью этой диаграммы можно определить
уровень громкости чистого тона какой-либо
частоты, зная уровень создаваемого им
звукового давления.

![]()
Средства
звукового наблюдения
Например,
если синусоидальная волна частотой 100
Гц создаёт звуковое давление уровнем
60 дБ, то, проведя прямые, соответствующие
этим значениям на диаграмме, находим
на их пересечении изофону, соответствующую
уровню громкости 50 фон. Это значит, что
данный звук имеет уровень громкости 50
фон.
Изофона
«0 фон», обозначенная пунктиром,
характеризует порог
слышимости звуков
разной частоты для нормального слуха.
На
практике часто представляет интерес
не уровень громкости, выраженный в
фонах, а величина, показывающая, во
сколько данный звук громче другого.
Представляет интерес также вопрос о
том, как складываются громкости двух
разных тонов. Так, если имеются два тона
разных частот с уровнем 70 фон каждый,
то это не значит, что суммарный уровень
громкости будет равен 140 фон.
Зависимость
громкости от уровня звукового давления
(и интенсивности
звука)
является сугубо нелинейной
кривой,
она имеет логарифмический характер.
При увеличении уровня звукового
давления на 10 дБ громкость звука
возрастёт в 2 раза. Это значит, что
уровням громкости 40, 50 и 60 фон
соответствуют громкости 1, 2 и 4 сона.
физические
основы звуковых методов исследования
в клинике
Звук,
как и свет, является источником информации,
и в этом его главное значение. Звуки
природы, речь окружающих нас людей, шум
работающих машин многое сообщают нам.
Чтобы представить значение звука для
человека, достаточно временно лишить
себя возможности воспринимать звук –
закрыть уши. Естественно, что звук может
быть и источником информации о состоянии
внутренних органов человека.
Распространенный
звуковой метод диагностики заболеваний
– аускультация (выслушивание). Для
ау-скультации используют стетоскоп или
фонендоскоп. Фонендоскоп состоит из
полой капсулы с передающей звук мембраной,
прикладываемой к телу больного, от нее
идут резиновые трубки к уху врача. В
полой капсуле возникает резонанс столба
воздуха, вследствие чего усиливается
звучание и улучшается ау-скультация.
При аускультации легких выслушивают
дыхательные шумы, разные хрипы, характерные
для заболеваний. По изменению тонов
сердца и появлению шумов можно судить
о состоянии сердечной деятельности.
Используя аускультацию, можно установить
наличие перистальтики желудка и
кишечника, прослушать сердцебиение
плода.
Для
одновременного выслушивания больного
несколькими исследователями с учебной
целью или при консилиуме используют
систему, в которую входят микрофон,
усилитель и громкоговоритель или
несколько телефонов.
Длядиагностики
состояния сердечной деятельности
применяется метод, подобный аускультации
и называемый фонокардиографией (ФКГ).
Этот метод заклю16б чается в графической
регистрации тонов и шумов сердца и их
диагностической интерпретации. Запись
фонокардиограммы производят с помощью
фонокардиографа, состоящего из микрофона,
усилителя, системы частотных фильтров
и регистрирующего устройства.
Принципиально
отличным от двух изложенных выше звуковых
методов является перкуссия. При этом
методе выслушивают звучание отдельных
частей тела при их простукивании.
Схематично тело человека можно представить
как совокупность газонаполненных
(легких), жидких (внутренние органы) и
твердых (кость) объемов. При ударе по
поверхности тела возникают колебания,
частоты которых имеют широкий диапазон.
Из этого диапазона одни колебания
погаснут довольно быстро, другие же,
совпадающие с собственными колебаниями
пустот, усилятся и вследствие резонанса
будут слышимы. Опытный врач по тону
перкуторных звуков определяет состояние
и расположение (тонографию) внутренних
органов.
15.
Инфразву́к (от лат. infra —
ниже, под) — звуковые
волны имеющие
частоту ниже воспринимаемой человеческим
ухом. Поскольку обычно человеческое
ухо способно слышать звуки в диапазоне
частот 16 — 20000 Гц,
то за верхнюю границу частотного
диапазона инфразвука обычно принимают
16 Гц. Нижняя же граница инфразвукового
диапазона условно определена как
0,001 Гц.
Практический интерес могут представлять
колебания от десятых и даже сотых долей
герц, то есть с периодами в десяток
секунд.
Природа
возникновения инфразвуковых колебаний
такая же, как и у слышимого звука, поэтому
инфразвук подчиняется тем же
закономерностям, и для его описания
используется такой же математический
аппарат, как и для обычного слышимого
звука (кроме понятий, связанных с уровнем
звука). Инфразвук слабо поглощается
средой, поэтому может распространяться
на значительные расстояния от источника.
Из-за очень большой длины
волны ярко
выражена дифракция.
Инфразвук,
образующийся в море, называют одной из
возможных причин нахождения судов,
покинутых экипажем[1] (см. Бермудский
треугольник, Корабль-призрак).
Инфразвук.
Действие инфразвука на биологические
объекты.
Инфразвук
— колебательные процессы с частотами
ниже 20 Гц. Инфразвуки
– не воспринимаются слухом человека.
Инфразвук
оказывает неблагоприятное влияние на
функциональное состояние ряда систем
организма: усталость, головная боль,
сонливость, раздражение и др.
Предполагается,
что первичный механизм действия
инфразвука на организм имеет резонансную
природу.
Ультразвук,
методы его получения. Физические
характеристики и особенности
распространения ультразвуковых волн.
Взаимодействие ультразвука с веществом.
Кавитация. Применение ультразвука:
эхолокация, диспергирование, дефектоскопия,
ультразвуковое резание.
Ультразвуком
– (УЗ)
называют механические колебания и
волны, частоты которых более 20 кГц.
Для
получения УЗ используется устройства,
называемые УЗ
– излучателем. Наибольшее
распространение получили электромеханические
излучатели, основанные
на явление обратного пьезоэлектрического
эффекта.
По
своей физической природе Ультразвук
представляет
собой упруги
волны и
в этом он не отличается от звука. от
20 000 до миллиарда Гц.
Принципиальной
физической чертой звуковых колебаний
является амплитуда волны, либо амплитуда
смещения.
Ультразвук
в
газах и, в частности, в воздухе
распространяется с большим затуханием.
Жидкости и твёрдые тела (в особенности
монокристаллы) представляют собой, как
правило, хорошие проводники.
Ультразвук,
затухание, в которых значительно меньше.
Так, например, в воде затухание Ультразвук
при прочих равных условиях приблизительно
в 1000 раз меньше, чем в воздухе.
Кавитация
– сжатия и разрежения, создаваемые
ультразвуком, приводят к образованию
разрывов сплошности жидкости.
Применение
ультразвука:
Эхолокация
— способ,
при помощи которого положение объекта
определяется по времени задержки
возвращений отражённой волны.
Диспергирование
— Размельчение
твердых веществ или жидкостей под
действием ультразвуковых колебаний.
Дефектоскопия
— поиск дефектов в
материале изделия ультразвуковым
методом, то есть путём излучения и
принятия ультразвуковых
колебаний,
и дальнейшего анализа их амплитуды,
времени прихода, формы и пр. с помощью
специального оборудования —
ультразвукового дефектоскопа.
Ультразвуковое
резание
— основано на сообщении режущему
инструменту УЗ механических колебаний,
что в значительной мере снижает усилие
резания, себестоимость оборудования и
повышает качество изготавливаемых
изделий (нарезания резьб, сверления,
точения, фрезерования). УЗ
резание находит в медицине для рассечения
биологических тканей.
Действие
ультразвука на биологические объекты.
Применение ультразвука для диагностики
и для лечения. Ультразвуковая хирургия.
Преимущества ультразвуковых методов.
Физические
процессы, обусловленные воздействием
УЗ, вызывают в биологических объектах
следующие основные эффекты.
—
микровибрации на клеточном и субклеточном
уровне;
—
Разрушение биомакромолекул;
—
Перестройку и повреждение биологических
мембран, изменение проницаемости
мембран;
—
тепловое действие;
—
разрушение клеток и микроорганизмов.
Медико-биологические
приложения ультразвука можно в основном
разделить на два направления: методы
диагностики и исследования и методы
воздействия.
Метод
диагностики:
1)
относятся
локационные методы и использованием
главным образом импульсного излучения.
Z:
энцефалография
– определение опухолей и отека головного
мозга,
ультразвуковое кардиография
– измерение размера сердца в динамике;
в офтальмологии –
ультразвуковая локация
для определения размеров глазных сред.
С помощью эффекта Доплера изучается
характер движения сердечных клапанов,
измеряется скорость кровотока.
2)
К
лечению относят
ультразвуковая
физиотерапия.
Обычно на пациента воздействуют частотой
800 кГц.
Первичным
механизмом ультразвуковой терапии
являются механическое и тепловое
действия на ткань.
При
лечение таких заболеваний как астма,
туберкулез и т.д. применяю аэрозоли
различных лекарственных веществ
полученным с помощью ультразвука.
При
операциях ультразвук применяют как
“ультразвуковой скальпель”, способный
рассекать и мягкие и костные ткани. В
настоящее время разработан новый метод
“сваривания” поврежденных или
трансплантируемых костных тканей с
помощью ультразвука (ультразвуковой
остеосинтез).
Главное
преимущество ультразвука перед другими
мутагенами (рентгеновские лучи,
ультрафиолетовые лучи) заключается в
том, что с ним чрезвычайно легко работать.
Эффект
Доплера и его использование в медицине.
Эффектом
Доплера называют
изменение частоты волн, воспринимаемых
наблюдателем (приемником волн), вследствие
относительного движения источника волн
и наблюдателя.
Эффект
был впервые описан Кристианом
Доплером в 1842 году.
Эффект
Доплера используется для определения
скорости кровотока, скорости движения
клапанов и стенок сердца (доплеровская
эхокардиография) и других органов.
Проявление
эффекта Доплера широко используется в
различных медицинских приборах,
использующих, как правило, ультразвуковые
волны в МГц диапазоне частот.
Например,
отражённые от красных кровяных телец
ультразвуковые волны можно использовать
для определения скорости кровотока.
Аналогичным образом этот метод можно
применять для обнаружения движения
грудной клетки зародыша, а также для
дистанционного контроля за сердцебиениями.
16.
Ультразву́к —
упругие колебания с частотой за пределом
слышимости для человека. Обычно
ультразвуковым диапазоном считают
частоты выше 18 000 герц.
Хотя
о существовании ультразвука известно
давно, его практическое использование
достаточно молодо. В наше время ультразвук
широко применяется в различных физических
и технологических методах. Так, по
скорости распространения звука в среде
судят о её физических характеристиках.
Измерения скорости на ультразвуковых
частотах позволяет с весьма малыми
погрешностями определять, например,
адиабатические характеристики
быстропротекающих процессов, значения
удельной теплоемкости газов, упругие
постоянные твердых тел.
Частота
ультразвуковых колебаний, применяемых
в промышленности и биологии, лежит в
диапазоне порядка нескольких МГц.
Такие колебания обычно создают с помощью
пьезокерамических преобразователей
из титанита бария. В тех случаях, когда
основное значение имеет мощность
ультразвуковых колебаний, обычно
используются механические источники
ультразвука. Первоначально все
ультразвуковые волны получали механическим
путем (камертоны, свистки, сирены).
В
природе УЗ встречается как в качестве
компонентов многих естественных шумов
(в шуме ветра, водопада, дождя, в шуме
гальки, перекатываемой морским прибоем,
в звуках, сопровождающих грозовые
разряды, и т. д.), так и среди звуков
животного мира. Некоторые животные
пользуются ультразвуковыми волнами
для обнаружения препятствий, ориентировки
в пространстве.
Излучатели
ультразвука можно подразделить на две
большие группы. К первой относятся
излучатели-генераторы; колебания в них
возбуждаются из-за наличия препятствий
на пути постоянного потока — струи
газа или жидкости. Вторая группа
излучателей — электроакустические
преобразователи; они преобразуют уже
заданные колебания электрического
напряжения или тока в механическое
колебание твердого тела, которое и
излучает в окружающую среду акустические
волны.
Физические свойства ультразвука
Применение
ультразвука в медицинской диагностике
связано с возможностью получения
изображения внутренних органов и
структур. Основой метода является
взаимодействие ультразвука с тканями
тела человека. Собственно получение
изображения можно разделить на две
части. Первая — излучение коротких
ультразвуковых импульсов, направленное
в исследуемые ткани и второе — формирование
изображения на основе отраженных
сигналов. Понимание принципа работы
ультразвуковой диагностической
установки, знание основ физики ультразвука
и его взаимодействия с тканями тела
человека помогут избежать механического,
бездумного использования прибора и,
следовательно, более грамотно подходить
к процессу диагностики.
Звук
— это механическая продольная волна,
в которой колебания частиц находятся
в той же плоскости, что и направление
распространения энергии (рис. 1).

Рис. 1.
Визуальное и графическое представление
изменений давления и плотности в
ультразвуковой волне.
Волна
переносит энергию, но не материю. В
отличие от электромагнитных волн (свет,
радиоволны и т.д.) для распространения
звука необходима среда — он не может
распространяться в вакууме. Как и все
волны, звук можно описать рядом параметров.
Это частота, длина волны, скорость
распространения в среде, период, амплитуда
и интенсивность. Частота, период,
амплитуда и интенсивность определяются
источником звука, скорость распространения
— средой, а длина волны — и источником
звука и средой. Частота — это число
полных колебаний (циклов) за период
времени в 1 секунду (рис. 2).

Рис. 2.
Частота ультразвуковой волны 2 цикла в
1 с = 2 Гц
Единицами
измерения частоты являются герц (Гц) и
мегагерц (МГц). Один герц — это одно
колебание в секунду. Один мегагерц =
1000000 герц. Что же делает звук «ультра»?
Это частота. Верхняя граница слышимого
звука — 20000 Гц (20 килогерц (кГц)) —
является нижней границей ультразвукового
диапазона. Ультразвуковые локаторы
летучих мышей работают в диапазоне
25÷500 кГц. В современных ультразвуковых
приборах для получения изображения
используется ультразвук частотой от
2 МГц и выше. Период — это время,
необходимое для получения одного полного
цикла колебаний (рис. 3).

Рис. 3.
Период ультразвуковой волны.
Единицами
измерения периода являются секунда (с)
и микросекунда (мксек). Одна микросекунда
является одной миллионной долей секунды.
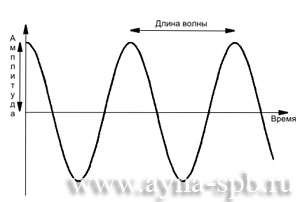
Период (мксек) = 1/частота (МГц). Длина
волны — это длина, которую занимает в
пространстве одно колебание (рис. 4).

Рис. 4.
Длина волны.
Единицы
измерения — метр (м) и миллиметр (мм).
Скорость распространения ультразвука
— это скорость, с которой волна
перемещается в среде. Единицами скорости
распространения ультразвука являются
метр в секунду (м/с) и миллиметр в
микросекунду (мм/мксек). Скорость
распространения ультразвука определяется
плотностью и упругостью среды. Скорость
распространения ультразвука увеличивается
при увеличении упругости и уменьшении
плотности среды. В таблице 2.1 представлены
скорости распространения ультразвука
в некоторых тканях тела человека.
|
Таблица |
|
|
Ткань |
Скорость |
|
Мозг |
1,51 |
|
Печень |
1,55 |
|
Почки |
1,.56 |
|
Мышцы |
1,58 |
|
Жировая |
1,45 |
|
Кости |
4,08 |
|
Кровь |
1,57 |
|
Мягкие |
1,54 |
|
Вода |
1,48 |
|
Воздух |
0,33 |
Усредненная
скорость распространения ультразвука
в тканях тела человека составляет 1540
м/с — на эту скорость запрограммировано
большинство ультразвуковых диагностических
приборов. Скорость распространения
ультразвука (С), частота (f) и длина волны
(λ) связаны между собой следующим
уравнением: С = f × λ. Так как в нашем
случае скорость считается постоянной
(1540 м/с), то оставшиеся две переменные f
и λ связаны между собой обратно
пропорциональной зависимостью. Чем
выше частота, тем меньше длина волны и
тем меньше размеры объектов, которые
мы можем увидеть. Еще одним важным
параметром среды является акустическое
сопротивление (Z). Акустическое
сопротивление — это произведение
значения плотности среды и скорости
распространения ультразвука. Сопротивление
(Z) = плотность (р) × скорость распространения
(С).
Для
получения изображения в ультразвуковой
диагностике используется не ультразвук,
который излучается трансдьюсером
непрерывно (постоянной волной), а
ультразвук излучаемый в виде коротких
импульсов (импульсный). Он генерируется
при приложении к пьезоэлементу коротких
электрических импульсов. Для характеристики
импульсного ультразвука используются
дополнительные параметры. Частота
повторения импульсов — это число
импульсов излучаемых в единицу времени
(секунду). Частота повторения импульсов
из меряете я в герцах (Гц) и килогерцах
(кГц). Продолжительность импульса — это
временная протяженность одного импульса
(рис. 5).
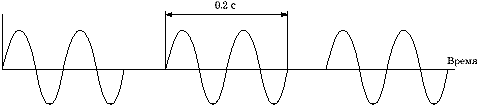
Рис. 5.
Продолжительность ультразвукового
импульса.
Измеряется
в секундах (с) и микросекундах (мксек).
Фактор занятости — это часть времени,
в которое происходит излучение (в форме
импульсов) ультразвука. Пространственная
протяженность импульса (ППИ) — это длина
пространства, в котором размещается
один ультразвуковой импульс (рис. 6).

Рис. 6.
Пространственная протяженность импульса.
Для
мягких тканей пространственная
протяженность импульса (мм) равна
произведению 1,54 (скорость распространения
ультразвука в мм/мксек) и числа колебаний
(циклов) в импульсе (n), отнесенному к
частоте в МГц. Или ППИ = 1,54 × n/f.
Уменьшения пространственной протяженности
импульса можно достичь (а это очень
важно для улучшения осевой разрешающей
способности) за счет уменьшения числа
колебаний в импульсе или увеличения
частоты. Амплитуда ультразвуковой волны
— это максимальное отклонение наблюдаемой
физической переменной от среднего
значения (рис. 7).

Рис. 7.
Амплитуда ультразвуковой волны
Интенсивность
ультразвука — это отношение мощности
волны к площади, по которой распределяется
ультразвуковой поток. Измеряется в
ваттах на квадратный сантиметр (Вт/кв.см).
При равной мощности излучения чем меньше
площадь потока, тем выше интенсивность.
Интенсивность также пропорциональна
квадрату амплитуды. Так, если амплитуда
удваивается, то интенсивность учетверяется.
Интенсивность неоднородна как по площади
потока, так и, в случае импульсного
ультразвука, во времени.
При
прохождении через любую среду будет
наблюдаться уменьшение амплитуды и
интенсивности ультразвукового сигнала,
которое называется затуханием. Затухание
ультразвукового сигнала вызывается
поглощением, отражением и рассеиванием.
Единицей затухания является децибел
(дБ). Коэффициент затухания — это
ослабление ультразвукового сигнала на
единицу длины пути этого сигнала (дБ/см).
Коэффициент затухания возрастает с
увеличением частоты. Усредненные
коэффициенты затухания в мягких тканях
и уменьшение интенсивности эхосигнала
в зависимости от частоты представлены
в таблице 2.2.
|
Таблица |
|||
|
Частота, |
Усреднённый |
Уменьшение |
|
|
1 см |
10 см |
||
|
1 |
1 |
21 |
90.0 |
|
2 |
2 |
37 |
99.0 |
|
3 |
3 |
50 |
99.9 |
|
5 |
5 |
60 |
99.999 |
|
7 |
7 |
80 |
–100 |
|
10 |
10 |
90 |
–100 |
Характеристики ультразвука: частота, интенсивность и глубина проникновения
 Ультразвук (широко применяется в косметологии и физиотерапии) представляет собой высокочастотные механические колебания частиц среды, которые распространяются в ней в виде попеременных сжатий и разрежений вещества. Частота ультразвуковых колебаний лежит в неслышном акустическом диапазоне (выше 16 кГц).
Ультразвук (широко применяется в косметологии и физиотерапии) представляет собой высокочастотные механические колебания частиц среды, которые распространяются в ней в виде попеременных сжатий и разрежений вещества. Частота ультразвуковых колебаний лежит в неслышном акустическом диапазоне (выше 16 кГц).
В физиотерапии и косметологии используют ультразвук частотой 24-42 кГц, 800-900 кГц или около 3000 кГц.
Основными физическими параметрами и величинами, которые используются для оценки свойств ультразвука, являются частота и интенсивность ультразвуковых колебаний.
Частота ультразвука
Частота колебаний – это число чередований сжатий и разряжений в единицу времени. Единица измерения в СИ – герц (Гц). 1 Гц – одно колебание в секунду. В терапевтической практике ультразвук используют в диапазоне частот 800-3000 кГц (1 кГц=1000 Гц). Выбор частоты ультразвука зависит от глубины расположения органов и тканей, подлежащих воздействию. При поверхностном их расположении применяют ультразвук высокой частоты (3 МГц), при более глубоком – более низкие частоты.
Глубина проникновения ультразвука
Глубина проникновения УЗ-колебаний зависит от их частоты. Чем больше частота колебаний, тем меньше глубина проникновения и наоборот.
- При частоте 1600-3000 кГц ультразвук проникает на глубину 1-1,5 см (поглощается кожей).
- При частоте 800-900 кГц – на 4-5 см.
- При частоте 20-45 кГц проникает на глубину 8-14 см.
Глубина проникновения веществ при фонофорезе значительно меньше, чем глубина проникновения ультразвуковых волн (колебаний).
Возможно, вам будет интересно:
Интенсивность ультразвука
Интенсивность ультразвуковых колебаний – это количество энергии, проходящее через 1 см² площади излучателя аппарата в течение 1 секунды. Единица измерения в системе СИ – Вт/см². Применяемую в физиотерапевтической и косметологической практике интенсивность ультразвуковых колебаний условно подразделяют на:
- малую (0,05-0,4 Вт/см²) — оказывает стимулирующее действие;
- среднюю (0,5-0,8 Вт/см²) — коррегирующее (противовоспалительное, обезболивающее) действие;
- большую (0,9-1,2 Вт/см²) — рассасывающее действие.
Из новых методик интересна так называемая «ультразвуковая липосакция» — применение низкочастотного (20-45 кГц) ультразвука со сверхбольшой интенсивностью – до 3 Вт/см².
Скорость распространения ультразвука в различных средах
Скорость распространения ультразвуковых колебаний в тканях зависит от плотности среды и величины акустического сопротивления. Чем плотнее ткань, тем больше скорость распространения ультразвука. В воздухе она равна 330 м/с, в воде – 1500 м/с, в сыворотке крови – 1060-1540 м/с, в костной ткани – 3350 м/с. Поэтому в неоднородных средах, какими являются ткани организма, распространение ультразвука происходит неравномерно. Максимум поглощения ультразвуковой энергии наблюдается в костной ткани, на границе разных тканей, а также на внутренних мембранах клеток.
Возможно, вам будет интересно:

Наталия Баховец
Автор статьи: кандидат медицинских наук, физиотерапевт, косметолог, аспирант кафедры физиотерапии СПбГМА им. И.М. Мечникова, автор многочисленных книг и методических пособий по аппаратной косметологии,
руководитель и методолог учебного центра АЮНА.

Ultrasound image (sonogram) of a fetus in the womb, viewed at 12 weeks of pregnancy (bidimensional scan)

An ultrasonic examination

Ultrasound is sound with frequencies greater than 20 kilohertz.[1] This frequency is the approximate upper audible limit of human hearing in healthy young adults. The physical principles of acoustic waves apply to any frequency range, including ultrasound. Ultrasonic devices operate with frequencies from 20 kHz up to several gigahertz.
Ultrasound is used in many different fields. Ultrasonic devices are used to detect objects and measure distances. Ultrasound imaging or sonography is often used in medicine. In the nondestructive testing of products and structures, ultrasound is used to detect invisible flaws. Industrially, ultrasound is used for cleaning, mixing, and accelerating chemical processes. Animals such as bats and porpoises use ultrasound for locating prey and obstacles.[2]
History

Galton whistle, one of the first devices to produce ultrasound
Acoustics, the science of sound, starts as far back as Pythagoras in the 6th century BC, who wrote on the mathematical properties of stringed instruments. Echolocation in bats was discovered by Lazzaro Spallanzani in 1794, when he demonstrated that bats hunted and navigated by inaudible sound, not vision. Francis Galton in 1893 invented the Galton whistle, an adjustable whistle that produced ultrasound, which he used to measure the hearing range of humans and other animals, demonstrating that many animals could hear sounds above the hearing range of humans.
The first article on the history of ultrasound was witten in 1948.[3] According to its author,
during the First World War, a Russian engineer named Chilowski submitted an idea for submarine detection to the French Government. The latter invited Paul Langevin, then Director of the School of Physics and Chemistry in Paris, to evaluate it. Chilowski’s proposal was to excite a cylindrical, mica condenser by a high-frequency Poulsen arc at approximately 100 kHz and thus to generate an ultrasound beam for detecting submerged objects. The idea of locating underwater obstacles had been suggested prior by L. F. Richardson, following the Titanic disaster. Richardson had proposed to position a high-frequency hydraulic whistle at the focus of a mirror and use the beam for locating submerged navigational hazards. A prototype was built by Sir Charles Parsons, the inventor of the vapour turbine, but the device was found not to be suitable for this purpose.
Langevin’s device made use of the piezoelectric effect, which he had been acquainted with whilst a student at the laboratory of Jacques and Pierre Curie.[4] Langevin calculated and built an ultrasound transducer comprising a thin sheet of quartz sandwiched between two steel plates. Langevin was the first to report cavitation-related bioeffects from ultrasound.[5]
Definition

Approximate frequency ranges corresponding to ultrasound, with rough guide of some applications
Ultrasound is defined by the American National Standards Institute as «sound at frequencies greater than 20 kHz». In air at atmospheric pressure, ultrasonic waves have wavelengths of 1.9 cm or less.
Perception

Humans
The upper frequency limit in humans (approximately 20 kHz) is due to limitations of the middle ear. Auditory sensation can occur if high‐intensity ultrasound is fed directly into the human skull and reaches the cochlea through bone conduction, without passing through the middle ear.[6]
Children can hear some high-pitched sounds that older adults cannot hear, because in humans the upper limit pitch of hearing tends to decrease with age.[7] An American cell phone company has used this to create ring signals that supposedly are only audible to younger humans,[8] but many older people can hear the signals, which may be because of the considerable variation of age-related deterioration in the upper hearing threshold.
Animals

Bats use ultrasounds to navigate in the darkness.

A dog whistle, which emits sound in the ultrasonic range, used to train dogs and other animals
Bats use a variety of ultrasonic ranging (echolocation) techniques to detect their prey. They can detect frequencies beyond 100 kHz, possibly up to 200 kHz.[9]
Many insects have good ultrasonic hearing, and most of these are nocturnal insects listening for echolocating bats. These include many groups of moths, beetles, praying mantises and lacewings. Upon hearing a bat, some insects will make evasive manoeuvres to escape being caught.[10] Ultrasonic frequencies trigger a reflex action in the noctuid moth that causes it to drop slightly in its flight to evade attack.[11] Tiger moths also emit clicks which may disturb bats’ echolocation,[12][13] and in other cases may advertise the fact that they are poisonous by emitting sound.[14][15]
Dogs and cats’ hearing range extends into the ultrasound; the top end of a dog’s hearing range is about 45 kHz, while a cat’s is 64 kHz.[16][17] The wild ancestors of cats and dogs evolved this higher hearing range to hear high-frequency sounds made by their preferred prey, small rodents.[16] A dog whistle is a whistle that emits ultrasound, used for training and calling dogs. The frequency of most dog whistles is within the range of 23 to 54 kHz.[18]
Toothed whales, including dolphins, can hear ultrasound and use such sounds in their navigational system (biosonar) to orient and to capture prey.[19] Porpoises have the highest known upper hearing limit at around 160 kHz.[20] Several types of fish can detect ultrasound. In the order Clupeiformes, members of the subfamily Alosinae (shad) have been shown to be able to detect sounds up to 180 kHz, while the other subfamilies (e.g. herrings) can hear only up to 4 kHz.[21]
Not a single bird species has been reported to be sensitive to ultrasound.[22]
Commercial ultrasonic systems have been sold for supposed indoors electronic pest control and outdoors ultrasonic algae control. However, no scientific evidence exists on the success of such devices for these purposes.[23][24][25]
Detection and ranging
Non-contact sensor
An ultrasonic level or sensing system requires no contact with the target. For many processes in the medical, pharmaceutical, military and general industries this is an advantage over inline sensors that may contaminate the liquids inside a vessel or tube or that may be clogged by the product.
Both continuous wave and pulsed systems are used. The principle behind a pulsed-ultrasonic technology is that the transmit signal consists of short bursts of ultrasonic energy. After each burst, the electronics looks for a return signal within a small window of time corresponding to the time it takes for the energy to pass through the vessel. Only a signal received during this window will qualify for additional signal processing.
A popular consumer application of ultrasonic ranging was the Polaroid SX-70 camera, which included a lightweight transducer system to focus the camera automatically. Polaroid later licensed this ultrasound technology and it became the basis of a variety of ultrasonic products.
Motion sensors and flow measurement
A common ultrasound application is an automatic door opener, where an ultrasonic sensor detects a person’s approach and opens the door. Ultrasonic sensors are also used to detect intruders; the ultrasound can cover a wide area from a single point. The flow in pipes or open channels can be measured by ultrasonic flowmeters, which measure the average velocity of flowing liquid. In rheology, an acoustic rheometer relies on the principle of ultrasound. In fluid mechanics, fluid flow can be measured using an ultrasonic flow meter.
Nondestructive testing
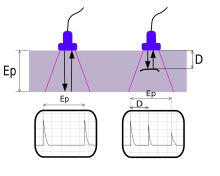
Principle of flaw detection with ultrasound. A void in the solid material reflects some energy back to the transducer, which is detected and displayed.
Ultrasonic testing is a type of nondestructive testing commonly used to find flaws in materials and to measure the thickness of objects. Frequencies of 2 to 10 MHz are common, but for special purposes other frequencies are used. Inspection may be manual or automated and is an essential part of modern manufacturing processes. Most metals can be inspected as well as plastics and aerospace composites. Lower frequency ultrasound (50–500 kHz) can also be used to inspect less dense materials such as wood, concrete and cement.
Ultrasound inspection of welded joints has been an alternative to radiography for nondestructive testing since the 1960s. Ultrasonic inspection eliminates the use of ionizing radiation, with safety and cost benefits. Ultrasound can also provide additional information such as the depth of flaws in a welded joint. Ultrasonic inspection has progressed from manual methods to computerized systems that automate much of the process. An ultrasonic test of a joint can identify the existence of flaws, measure their size, and identify their location. Not all welded materials are equally amenable to ultrasonic inspection; some materials have a large grain size that produces a high level of background noise in measurements.[26]

Non-destructive testing of a swing shaft showing spline cracking
Ultrasonic thickness measurement is one technique used to monitor quality of welds.
Ultrasonic range finding
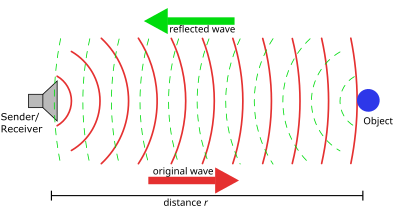
Principle of an active sonar
A common use of ultrasound is in underwater range finding; this use is also called Sonar. An ultrasonic pulse is generated in a particular direction. If there is an object in the path of this pulse, part or all of the pulse will be reflected back to the transmitter as an echo and can be detected through the receiver path. By measuring the difference in time between the pulse being transmitted and the echo being received, it is possible to determine the distance.
The measured travel time of Sonar pulses in water is strongly dependent on the temperature and the salinity of the water. Ultrasonic ranging is also applied for measurement in air and for short distances. For example, hand-held ultrasonic measuring tools can rapidly measure the layout of rooms.
Although range finding underwater is performed at both sub-audible and audible frequencies for great distances (1 to several kilometers), ultrasonic range finding is used when distances are shorter and the accuracy of the distance measurement is desired to be finer. Ultrasonic measurements may be limited through barrier layers with large salinity, temperature or vortex differentials. Ranging in water varies from about hundreds to thousands of meters, but can be performed with centimeters to meters accuracy
Ultrasound Identification (USID)
Ultrasound Identification (USID) is a Real-Time Locating System (RTLS) or Indoor Positioning System (IPS) technology used to automatically track and identify the location of objects in real time using simple, inexpensive nodes (badges/tags) attached to or embedded in objects and devices, which then transmit an ultrasound signal to communicate their location to microphone sensors.
Imaging

Sonogram of a fetus at 14 weeks (profile)

The potential for ultrasonic imaging of objects, with a 3 GHz sound wave producing resolution comparable to an optical image, was recognized by Sokolov in 1939, but techniques of the time produced relatively low-contrast images with poor sensitivity.[27]
Ultrasonic imaging uses frequencies of 2 megahertz and higher; the shorter wavelength allows resolution of small internal details in structures and tissues. The power density is generally less than 1 watt per square centimetre to avoid heating and cavitation effects in the object under examination.[28] High and ultra high ultrasound waves are used in acoustic microscopy, with frequencies up to 4 gigahertz. Ultrasonic imaging applications include industrial nondestructive testing, quality control and medical uses.[27]
Acoustic microscopy
Acoustic microscopy is the technique of using sound waves to visualize structures too small to be resolved by the human eye. Frequencies up to several gigahertz are used in acoustic microscopes. The reflection and diffraction of sound waves from microscopic structures can yield information not available with light.
Human medicine
Medical ultrasound is an ultrasound-based diagnostic medical imaging technique used to visualize muscles, tendons, and many internal organs to capture their size, structure and any pathological lesions with real time tomographic images. Ultrasound has been used by radiologists and sonographers to image the human body for at least 50 years and has become a widely used diagnostic tool. The technology is relatively inexpensive and portable, especially when compared with other techniques, such as magnetic resonance imaging (MRI) and computed tomography (CT). Ultrasound is also used to visualize fetuses during routine and emergency prenatal care. Such diagnostic applications used during pregnancy are referred to as obstetric sonography. As currently applied in the medical field, properly performed ultrasound poses no known risks to the patient.[29] Sonography does not use ionizing radiation, and the power levels used for imaging are too low to cause adverse heating or pressure effects in tissue.[30][31] Although the long-term effects due to ultrasound exposure at diagnostic intensity are still unknown,[32] currently most doctors feel that the benefits to patients outweigh the risks.[33] The ALARA (As Low As Reasonably Achievable) principle has been advocated for an ultrasound examination – that is, keeping the scanning time and power settings as low as possible but consistent with diagnostic imaging – and that by that principle nonmedical uses, which by definition are not necessary, are actively discouraged.[34]
Ultrasound is also increasingly being used in trauma and first aid cases, with emergency ultrasound becoming a staple of most EMT response teams. Furthermore, ultrasound is used in remote diagnosis cases where teleconsultation is required, such as scientific experiments in space or mobile sports team diagnosis.[35]
According to RadiologyInfo,[36] ultrasounds are useful in the detection of pelvic abnormalities and can involve techniques known as abdominal (transabdominal) ultrasound, vaginal (transvaginal or endovaginal) ultrasound in women, and also rectal (transrectal) ultrasound in men.
Veterinary medicine
Diagnostic ultrasound is used externally in horses for evaluation of soft tissue and tendon injuries, and internally in particular for reproductive work – evaluation of the reproductive tract of the mare and pregnancy detection.[37] It may also be used in an external manner in stallions for evaluation of testicular condition and diameter as well as internally for reproductive evaluation (deferent duct etc.).[38]
By 2005, ultrasound technology began to be used by the beef cattle industry to improve animal health and the yield of cattle operations.[39] Ultrasound is used to evaluate fat thickness, rib eye area, and intramuscular fat in living animals.[40] It is also used to evaluate the health and characteristics of unborn calves.
Ultrasound technology provides a means for cattle producers to obtain information that can be used to improve the breeding and husbandry of cattle. The technology can be expensive, and it requires a substantial time commitment for continuous data collection and operator training.[40] Nevertheless, this technology has proven useful in managing and running a cattle breeding operation.[39]
Processing and power
High-power applications of ultrasound often use frequencies between 20 kHz and a few hundred kHz. Intensities can be very high; above 10 watts per square centimeter, cavitation can be inducted in liquid media, and some applications use up to 1000 watts per square centimeter. Such high intensities can induce chemical changes or produce significant effects by direct mechanical action, and can inactivate harmful microorganisms.[28]
Physical therapy
Ultrasound has been used since the 1940s by physical and occupational therapists for treating connective tissue: ligaments, tendons, and fascia (and also scar tissue).[41] Conditions for which ultrasound may be used for treatment include the follow examples: ligament sprains, muscle strains, tendonitis, joint inflammation, plantar fasciitis, metatarsalgia, facet irritation, impingement syndrome, bursitis, rheumatoid arthritis, osteoarthritis, and scar tissue adhesion.
Biomedical applications
Ultrasound has diagnostic and therapeutic applications, which can be highly beneficial when used with dosage precautions.[42] Relatively high power ultrasound can break up stony deposits or tissue, accelerate the effect of drugs in a targeted area, assist in the measurement of the elastic properties of tissue, and can be used to sort cells or small particles for research.
Ultrasonic impact treatment
Ultrasonic impact treatment (UIT) uses ultrasound to enhance the mechanical and physical properties of metals.[43] It is a metallurgical processing technique in which ultrasonic energy is applied to a metal object. Ultrasonic treatment can result in controlled residual compressive stress, grain refinement and grain size reduction. Low and high cycle fatigue are enhanced and have been documented to provide increases up to ten times greater than non-UIT specimens. Additionally, UIT has proven effective in addressing stress corrosion cracking, corrosion fatigue and related issues.
When the UIT tool, made up of the ultrasonic transducer, pins and other components, comes into contact with the work piece it acoustically couples with the work piece, creating harmonic resonance.[44] This harmonic resonance is performed at a carefully calibrated frequency, to which metals respond very favorably.
Depending on the desired effects of treatment a combination of different frequencies and displacement amplitude is applied. These frequencies range between 25 and 55 kHz,[45] with the displacement amplitude of the resonant body of between 22 and 50 µm (0.00087 and 0.0020 in).
UIT devices rely on magnetostrictive transducers.
Processing
Ultrasonication offers great potential in the processing of liquids and slurries, by improving the mixing and chemical reactions in various applications and industries. Ultrasonication generates alternating low-pressure and high-pressure waves in liquids, leading to the formation and violent collapse of small vacuum bubbles. This phenomenon is termed cavitation and causes high speed impinging liquid jets and strong hydrodynamic shear-forces. These effects are used for the deagglomeration and milling of micrometre and nanometre-size materials as well as for the disintegration of cells or the mixing of reactants. In this aspect, ultrasonication is an alternative to high-speed mixers and agitator bead mills. Ultrasonic foils under the moving wire in a paper machine will use the shock waves from the imploding bubbles to distribute the cellulose fibres more uniformly in the produced paper web, which will make a stronger paper with more even surfaces. Furthermore, chemical reactions benefit from the free radicals created by the cavitation as well as from the energy input and the material transfer through boundary layers. For many processes, this sonochemical (see sonochemistry) effect leads to a substantial reduction in the reaction time, like in the transesterification of oil into biodiesel.[citation needed]
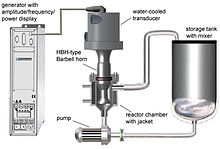
Schematic of bench and industrial-scale ultrasonic liquid processors
Substantial ultrasonic intensity and high ultrasonic vibration amplitudes are required for many processing applications, such as nano-crystallization, nano-emulsification,[46] deagglomeration, extraction, cell disruption, as well as many others. Commonly, a process is first tested on a laboratory scale to prove feasibility and establish some of the required ultrasonic exposure parameters. After this phase is complete, the process is transferred to a pilot (bench) scale for flow-through pre-production optimization and then to an industrial scale for continuous production. During these scale-up steps, it is essential to make sure that all local exposure conditions (ultrasonic amplitude, cavitation intensity, time spent in the active cavitation zone, etc.) stay the same. If this condition is met, the quality of the final product remains at the optimized level, while the productivity is increased by a predictable «scale-up factor». The productivity increase results from the fact that laboratory, bench and industrial-scale ultrasonic processor systems incorporate progressively larger ultrasonic horns, able to generate progressively larger high-intensity cavitation zones and, therefore, to process more material per unit of time. This is called «direct scalability». It is important to point out that increasing the power of the ultrasonic processor alone does not result in direct scalability, since it may be (and frequently is) accompanied by a reduction in the ultrasonic amplitude and cavitation intensity. During direct scale-up, all processing conditions must be maintained, while the power rating of the equipment is increased in order to enable the operation of a larger ultrasonic horn.[47][48][49]
Ultrasonic manipulation and characterization of particles
A researcher at the Industrial Materials Research Institute, Alessandro Malutta, devised an experiment that demonstrated the trapping action of ultrasonic standing waves on wood pulp fibers diluted in water and their parallel orienting into the equidistant pressure planes.[50] The time to orient the fibers in equidistant planes is measured with a laser and an electro-optical sensor. This could provide the paper industry a quick on-line fiber size measurement system. A somewhat different implementation was demonstrated at Pennsylvania State University using a microchip which generated a pair of perpendicular standing surface acoustic waves allowing to position particles equidistant to each other on a grid. This experiment, called acoustic tweezers, can be used for applications in material sciences, biology, physics, chemistry and nanotechnology.
Ultrasonic cleaning
Ultrasonic cleaners, sometimes mistakenly called supersonic cleaners, are used at frequencies from 20 to 40 kHz for jewellery, lenses and other optical parts, watches, dental instruments, surgical instruments, diving regulators and industrial parts. An ultrasonic cleaner works mostly by energy released from the collapse of millions of microscopic cavitations near the dirty surface. The bubbles made by cavitation collapse form tiny shockwaves that break up and disperse contaminants on the object’s surface.
Ultrasonic disintegration
Similar to ultrasonic cleaning, biological cells including bacteria can be disintegrated. High power ultrasound produces cavitation that facilitates particle disintegration or reactions. This has uses in biological science for analytical or chemical purposes (sonication and sonoporation) and in killing bacteria in sewage. High power ultrasound can disintegrate corn slurry and enhance liquefaction and saccharification for higher ethanol yield in dry corn milling plants.[51][52]
Ultrasonic humidifier
The ultrasonic humidifier, one type of nebulizer (a device that creates a very fine spray), is a popular type of humidifier. It works by vibrating a metal plate at ultrasonic frequencies to nebulize (sometimes incorrectly called «atomize») the water. Because the water is not heated for evaporation, it produces a cool mist. The ultrasonic pressure waves nebulize not only the water but also materials in the water including calcium, other minerals, viruses, fungi, bacteria,[53] and other impurities. Illness caused by impurities that reside in a humidifier’s reservoir fall under the heading of «Humidifier Fever».
Ultrasonic humidifiers are frequently used in aeroponics, where they are generally referred to as foggers.
Ultrasonic welding
In ultrasonic welding of plastics, high frequency (15 kHz to 40 kHz) low amplitude vibration is used to create heat by way of friction between the materials to be joined. The interface of the two parts is specially designed to concentrate the energy for maximum weld strength.
Sonochemistry
Power ultrasound in the 20–100 kHz range is used in chemistry. The ultrasound does not interact directly with molecules to induce the chemical change, as its typical wavelength (in the millimeter range) is too long compared to the molecules. Instead, the energy causes cavitation which generates extremes of temperature and pressure in the liquid where the reaction happens. Ultrasound also breaks up solids and removes passivating layers of inert material to give a larger surface area for the reaction to occur over. Both of these effects make the reaction faster. In 2008, Atul Kumar reported synthesis of Hantzsch esters and polyhydroquinoline derivatives via multi-component reaction protocol in aqueous micelles using ultrasound.[54]
Ultrasound is used in extraction, using different frequencies.
Wireless communication
In July 2015, The Economist reported that researchers at the University of California, Berkeley have conducted ultrasound studies using graphene diaphragms. The thinness and low weight of graphene combined with its strength make it an effective material to use in ultrasound communications. One suggested application of the technology would be underwater communications, where radio waves typically do not travel well.[55]
Ultrasonic signals have been used in «audio beacons» for cross-device tracking of Internet users.[56][57]
Other uses
Ultrasound when applied in specific configurations can produce short bursts of light in an exotic phenomenon known as sonoluminescence. This phenomenon is being investigated partly because of the possibility of bubble fusion (a nuclear fusion reaction hypothesized to occur during sonoluminescence).
Ultrasound is used when characterizing particulates through the technique of ultrasound attenuation spectroscopy or by observing electroacoustic phenomena or by transcranial pulsed ultrasound.
Audio can be propagated by modulated ultrasound.
A formerly popular consumer application of ultrasound was in television remote controls for adjusting volume and changing channels. Introduced by Zenith in the late 1950s, the system used a hand-held remote control containing short rod resonators struck by small hammers, and a microphone on the set. Filters and detectors discriminated between the various operations. The principal advantages were that no battery was needed in the hand-held control box and, unlike radio waves, the ultrasound was unlikely to affect neighboring sets. Ultrasound remained in use until displaced by infrared systems starting in the late 1980s.[58]
Safety
Occupational exposure to ultrasound in excess of 120 dB may lead to hearing loss. Exposure in excess of 155 dB may produce heating effects that are harmful to the human body, and it has been calculated that exposures above 180 dB may lead to death.[59] The UK’s independent Advisory Group on Non-ionising Radiation (AGNIR) produced a report in 2010, which was published by the UK Health Protection Agency (HPA). This report recommended an exposure limit for the general public to airborne ultrasound sound pressure levels (SPL) of 70 dB (at 20 kHz), and 100 dB (at 25 kHz and above).[60]
In medical ultrasound, guidelines exist to prevent inertial cavitation from happening. The risk of inertial cavitation damage is expressed by the mechanical index.
See also
- Acoustic droplet ejection
- Acoustic emission
- Bat detector
- Contrast-enhanced ultrasound
- Delay-line memory
- Infrasound — sound at extremely low frequencies
- Isochoic
- Laser ultrasonics
- Phased array ultrasonics
- Picosecond ultrasonics
- Sonomicrometry
- Sound from ultrasound (also known as hypersonic sound)
- Surface acoustic wave
- Ultrasonic motor
- Ultrasonic attenuation
- Ultrasound attenuation spectroscopy
References
- ^ Dance, D.R.; Christofides, S.; Maidment, A.D.A.; McLean, I.D.; Ng, K.H., eds. (2014). «12: Physics of Ultrasound». Diagnostic Radiology Physics: A Handbook for Teachers and Students. Vienna, Austria: International Atomic Energy Agency. p. 291. ISBN 978-92-0-131010-1.
- ^ Novelline R (1997). Squire’s Fundamentals of Radiology (5th ed.). Harvard University Press. pp. 34–35. ISBN 978-0-674-83339-5.
- ^ Klein E (1948). «Some background history of ultrasonics». Journal of the Acoustical Society of America. 20 (5): 601–604. Bibcode:1948ASAJ…20..601K. doi:10.1121/1.1906413.
- ^ Pollet B (2012). Power Ultrasound in Electrochemistry: From Versatile Laboratory Tool to Engineering Solution. Hoboken: Wiley. ISBN 978-1-119-96786-6.
- ^ Postema M (2004). Medical Bubbles. Veenendaal: Universal Press. doi:10.5281/zenodo.4771630. ISBN 90-365-2037-1.
- ^ Corso JF (1963). «Bone-conduction thresholds for sonic and ultrasonic frequencies». Journal of the Acoustical Society of America. 35 (11): 1738–1743. Bibcode:1963ASAJ…35.1738C. doi:10.1121/1.1918804.
- ^ Takeda S, Morioka I, Miyashita K, Okumura A, Yoshida Y, Matsumoto K (1992). «Age variation in the upper limit of hearing». European Journal of Applied Physiology and Occupational Physiology. 65 (5): 403–8. doi:10.1007/BF00243505. PMID 1425644. S2CID 33698151.
- ^ Vitello P (12 June 2006). «A Ring Tone Meant to Fall on Deaf Ears». The New York Times.
- ^ Popper A, Fay RR, eds. (1995). Hearing by Bats. Springer Handbook of Auditory Research. Vol. 5. Springer. ISBN 978-1-4612-2556-0.
- ^ Surlykke A, Miller LA (2001). «How some insects detect and avoid being eaten by bats: Tactics and counter tactics of prey and predator». BioScience. 51 (7): 570. doi:10.1641/0006-3568(2001)051[0570:HSIDAA]2.0.CO;2.
- ^ Jones G, Waters DA (August 2000). «Moth hearing in response to bat echolocation calls manipulated independently in time and frequency». Proceedings. Biological Sciences. 267 (1453): 1627–32. doi:10.1098/rspb.2000.1188. PMC 1690724. PMID 11467425.
- ^ Kaplan M (17 July 2009). «Moths Jam Bat Sonar, Throw the Predators Off Course». National Geographic News. Archived from the original on 22 August 2009. Retrieved 26 August 2009.
- ^ «Some Moths Escape Bats By Jamming Sonar». Talk of the Nation. National Public Radio. Archived from the original on 10 August 2017.
- ^ Surlykke A, Miller LA (1985). «The influence of arctiid moth clicks on bat echolocation; jamming or warning?» (PDF). Journal of Comparative Physiology A. 156 (6): 831–843. doi:10.1007/BF00610835. S2CID 25308785. Archived from the original (PDF) on 25 April 2012.
- ^ Tougaard J, Miller LA, Simmons JA (2003). «The role of arctiid moth clicks in defense against echolocating bats: interference with temporal processing». In Thomas J, Moss CF, Vater M (eds.). Advances in the study of echolocation in bats and dolphins. Chicago: Chicago University Press. pp. 365–372.
- ^ a b Krantz L (2009). Power of the Dog: Things Your Dog Can Do That You Can’t. MacMillan. pp. 35–37. ISBN 978-0312567224.
- ^ Strain GM (2010). «How Well Do Dogs and Other Animals Hear?». Prof. Strain’s website. School of Veterinary Medicine, Louisiana State University. Archived from the original on 8 August 2011. Retrieved 21 July 2012.
- ^ Coile DC, Bonham MH (2008). «Why Do Dogs Like Balls?: More Than 200 Canine Quirks, Curiosities, and Conundrums Revealed». Sterling Publishing Company, Inc: 116. ISBN 978-1-4027-5039-7.
- ^ Whitlow WL (1993). The sonar of dolphins. Springer. ISBN 978-0-387-97835-2. Retrieved 13 November 2011.
- ^ Kastelein RA, Bunskoek P, Hagedoorn M, Au WW, de Haan D (July 2002). «Audiogram of a harbor porpoise (Phocoena phocoena) measured with narrow-band frequency-modulated signals». The Journal of the Acoustical Society of America. 112 (1): 334–44. Bibcode:2002ASAJ..112..334K. doi:10.1121/1.1480835. PMID 12141360.
- ^ Mann DA, Higgs DM, Tavolga WN, Souza MJ, Popper AN (June 2001). «Ultrasound detection by clupeiform fishes». The Journal of the Acoustical Society of America. 109 (6): 3048–54. Bibcode:2001ASAJ..109.3048M. doi:10.1121/1.1368406. PMID 11425147.
- ^ «What Can Birds Hear». University Of Nebraska. Retrieved 31 August 2016.
- ^ Hui YH (2003). Food plant sanitation. CRC Press. p. 289. ISBN 978-0-8247-0793-4.
- ^ Vertebrate pests: problems and control; Volume 5 of Principles of plant and animal pest control, National Research Council (U.S.). Committee on Plant and Animal Pests; Issue 1697 of Publication (National Research Council (U.S.))). National Academies. 1970. p. 92.
- ^ Jackson WB, McCartney WC, Ashton AD (1989). «Protocol for Field Tests of Ultrasonic Devices for Rodent Management». In Fagerstone KA, Curnow RD (eds.). Vertebrate pest control and management materials. Vol. 6. ASTM International. p. 8. ISBN 978-0-8031-1281-0.
- ^ Buschow KH, et al., eds. (2001). Encyclopedia of Materials. Elsevier. p. 5990. ISBN 978-0-08-043152-9.
- ^ a b Papadakis EP, ed. (1999). Ultrasonic Instruments & Devices. Academic Press. p. 752. ISBN 978-0-12-531951-5.
- ^ a b Betts GD, Williams A, Oakley RM (2000). «Inactivation of Food-borne Microorganisms using Power Ultrasound». In Robinson RK, Batt CA, Patel PD (eds.). Encyclopedia of Food Microbiology. Academic Press. p. 2202. ISBN 978-0-12-227070-3.
- ^ Hangiandreou NJ (2003). «AAPM/RSNA physics tutorial for residents. Topics in US: B-mode US: basic concepts and new technology». Radiographics. 23 (4): 1019–33. doi:10.1148/rg.234035034. PMID 12853678.
- ^ Center for Devices and Radiological Health. «Medical Imaging – Ultrasound Imaging». www.fda.gov. Retrieved 18 April 2019.
- ^ Ter Haar G (August 2011). «Ultrasonic imaging: safety considerations». Interface Focus. 1 (4): 686–97. doi:10.1098/rsfs.2011.0029. PMC 3262273. PMID 22866238.
- ^ «FDA Radiological Health – Ultrasound Imaging». United States Food and Drug Administration. 6 September 2011. Archived from the original on 3 July 2015. Retrieved 13 November 2011.
- ^ «Patient Information – Ultrasound Safety». American Institute of Ultrasound in Medicine. Archived from the original on 21 February 2007.
- ^ «American Institute for Ultrasound in Medicine practice guidelines». American Institute for Ultrasound in Medicine. Archived from the original on 1 July 2015. Retrieved 1 July 2015.
- ^ «DistanceDoc and MedRecorder: New Approach to Remote Ultrasound Imaging Solutions». Epiphan Systems. Archived from the original on 14 February 2011.
- ^ «Ultrasound Imaging of the Pelvis». radiologyinfo.org. Archived from the original on 25 June 2008. Retrieved 21 June 2008.
- ^ Pycock JF. «Ultrasound characteristics of the uterus in the cycling mare and their correlation with steroid hormones and timing of ovulation». Archived from the original on 31 January 2009.
- ^ McKinnon AO, Voss JL (1993). Equine Reproduction. Lea & Febiger. ISBN 978-0-8121-1427-0.
- ^ a b Bennett D (19 May 2005). «Subiaco Abbey’s Angus herd». Delta Farm Press. Archived from the original on 4 April 2007. Retrieved 27 February 2010.
- ^ a b Wagner W. «Extension Effort in Beef Cattle Breeding & Selection». West Virginia University Extension Service. Archived from the original on 14 December 2008. Retrieved 27 February 2010.
- ^ Watson T (2006). «Therapeutic Ultrasound» (PDF). Archived from the original (PDF) on 12 April 2007. for a pdf version with the author and date information)
- ^ Rapacholi MH, ed. (1982). Essentials of Medical Ultrasound: A Practical Introduction to the Principles, Techniques and Biomedical Applications. Humana Press.
- ^ Statnikov E. «Physics and mechanism of ultrasonic impact treatment». International Institute of Welding.
- ^ «UIT Solutions Video». appliedultrasonics.com. Archived from the original on 10 May 2012. Retrieved 28 September 2012.
- ^ «Tools of the Trade». appliedultrasonics.com. Archived from the original on 31 May 2008. Retrieved 28 September 2012.
- ^ Peshkovsky AS, Peshkovsky SL, Bystryak S (July 2013). «Scalable high-power ultrasonic technology for the production of translucent nanoemulsions». Chemical Engineering and Processing: Process Intensification. 69: 77–82. doi:10.1016/j.cep.2013.02.010.
- ^ Peshkovsky SL, Peshkovsky AS (March 2007). «Matching a transducer to water at cavitation: acoustic horn design principles». Ultrasonics Sonochemistry. 14 (3): 314–22. doi:10.1016/j.ultsonch.2006.07.003. PMID 16905351.
- ^ Peshkovsky AS, Peshkovsky SL (2010). «Industrial-scale processing of liquids by high-intensity acoustic cavitation-the underlying theory and ultrasonic equipment design principles». In Nowak FM (ed.). Sonochemistry: Theory, Reactions and Syntheses, and Applications. Hauppauge, NY: Nova Science Publishers.
- ^ Peshkovsky AS, Peshkovsky SL (2010). Acoustic cavitation theory and equipment design principles for industrial applications of high-intensity ultrasound. Physics Research and Technology. Hauppauge, NY: Nova Science Publishers.
- ^ Dion JL, Malutta A, Cielo P (November 1982). «Ultrasonic inspection of fiber suspensions». Journal of the Acoustical Society of America. 72 (5): 1524–1526. Bibcode:1982ASAJ…72.1524D. doi:10.1121/1.388688.
- ^ Akin B, Khanal SK, Sung S, Grewell D (2006). «Ultrasound pre-treatment of waste activated sludge». Water Science and Technology: Water Supply. 6 (6): 35. doi:10.2166/ws.2006.962.
- ^ Neis U, Nickel K, Tiehm A (November 2000). «Enhancement of anaerobic sludge digestion by ultrasonic disintegration». Water Science and Technology. 42 (9): 73. doi:10.2166/wst.2000.0174.
- ^ Oie S, Masumoto N, Hironaga K, Koshiro A, Kamiya A (1992). «Microbial contamination of ambient air by ultrasonic humidifier and preventive measures». Microbios. 72 (292–293): 161–6. PMID 1488018.
- ^ Atul K, Ram AM (2008). «Efficient Synthesis of Hantzsch Esters and Polyhydroquinoline Derivatives in Aqueous Micelles». Synlett. 2008 (6): 883–885. doi:10.1055/s-2008-1042908.
- ^ «Acoustic chatter». The Economist. economist.com. 11 July 2015. Archived from the original on 24 July 2015. Retrieved 23 July 2015.
- ^ Arp, Daniel. «Privacy Threats through Ultrasonic Side Channels on Mobile Devices». IEEE European Symposium on Security and Privacy: 1–13 – via IEEE Xplore.
- ^ Mavroudis, Vasilios (2017). «On the Privacy and Security of the Ultrasound Ecosystem» (PDF). Proceedings on Privacy Enhancing Technologies. 2017 (2): 95–112. doi:10.1515/popets-2017-0018. S2CID 5068807 – via Sciendo.
- ^ Butler JG (2006). Television: Critical Methods and Applications. Routledge. p. 276. ISBN 978-0-8058-5415-2.
- ^ Part II, industrial; commercial applications (1991). Guidelines for the Safe Use of Ultrasound Part II – Industrial & Commercial Applications – Safety Code 24. Health Canada. ISBN 978-0-660-13741-4. Archived from the original on 10 January 2013.
- ^ AGNIR (2010). Health Effects of Exposure to Ultrasound and Infrasound. Health Protection Agency, UK. pp. 167–170. Archived from the original on 8 November 2011. Retrieved 16 November 2011.
Further reading
- Kundu T (2004). Ultrasonic nondestructive evaluation: engineering and biological material characterization. Boca Raton, FL: CRC Press. ISBN 978-0-8493-1462-9.
- Grzesik J, Pluta E (1983). «High-frequency hearing risk of operators of industrial ultrasonic devices». International Archives of Occupational and Environmental Health. 53 (1): 77–88. doi:10.1007/BF00406179. PMID 6654504. S2CID 37176293.
External links
- Guidelines for the Safe Use of Ultrasound: valuable insight on the boundary conditions tending towards abuse of ultrasound
Звуковая волна – период, длина, частота и скорость распространения
Калькуляторы онлайн перевода длины звуковой, инфразвуковой или ультразвуковой
волны в частоту и наоборот. Таблица соответствия
нот полного звукоряда частотам.
Звуковая волна – это механические колебания, которые в результате колебаний молекул вещества распространяются в какой-либо
среде (в газе, жидкости или твёрдом теле) и, достигнув органов слуха человека, воспринимаются им как звук. Источник, создающий
возмущение (колебания воздуха), называется источником звука.
Как уже было сказано, для распространения звука необходима какая-либо упругая среда. Поэтому в вакууме ори, не ори – тебя никто не
услышит, по причине того, что звуковые волны распространяться не смогут, так как там нечему колебаться.., да и слушать там, по большому
счёту, тоже некому.
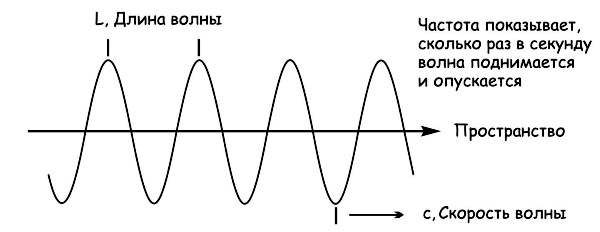
Так же, как и в случае с электромагнитными волнами, соотношение, связывающее длину звуковой волны с частотой колебаний,
в общем случае выглядит следующим образом:
λ (м) = V (м/сек) / F (Гц), где V (м/сек) — это скорость распространения
звука в среде.
Период колебаний также не претерпел никаких изменений и по-прежнему равен:
T(сек) = 1 / F (Гц) = λ (м) / V (м/сек).
Частота колебаний звукового сигнала F (Гц) – это параметр стабильный, практически не зависящий от среды распространения.
А вот скорость звука V (м/сек), а соответственно и длина звуковой волны – это величины, которые зависят
не только от плотности вещества, но и от его упругости, а в случае с жидкостями и газами ещё – и от температуры, и атмосферного
давления.
Зависимость скорости звуковой волны от свойств упругой среды легко прослеживается по следующей формуле:
V (м/сек) = √Eупр (паскаль) / ρ (кг/м3)
,
где Eупр представляет собой модуль объёмной упругости среды, а ρ – плотность среды.
Модуль упругости, так же как и плотность – это справочные величины, прописанные для конкретных материалов.
В качестве примера, ниже приведена таблица величины скорости распространения звука в различных средах:
| Среда | Скорость звука, м/сек |
| Воздух при 0° | 331 |
| Воздух при 30° | 350 |
| Вода | 1450 |
| Медь | 3800 |
| Дерево | 4800 |
| Железо | 4900 |
| Сталь | 5600 |
Для газов параметры модуля объёмной упругости и плотности имеют ярко выраженную зависимость от температуры и атмосферного давления.
Если углубиться, то скорость звука в газах можно вычислить по следующей формуле:
V (м/сек) = √γ*Ратм / ρ ,
где
γ = cp/сv – это отношение удельной теплоёмкости при постоянном давлении
к удельной теплоёмкости при постоянном объёме, а Pатм – атмосферное давление,
которое связано с температурой газообразной среды.
Поэтому, чтобы никого сильно не грузить, приведу и приближённую зависимость скорости звука (при нормальном
атмосферном давлении) от температуры среды:
V (м/сек) = (331 + 0,6 * T°), где 331 м/сек – это скорость звука при 0°С,
а T° – температура в градусах Цельсия.
Теперь можно совместить формулы и получить простое соотношение, связывающее длину звуковой волны с частотой колебаний с учётом
температуры среды:
λ (м) = (331 + 0,6 * T°) / F (Гц).
Всё это без лишнего напряга несложно посчитать при помощи листа бумаги или деревянных счёт, ну а для пущего упрощения жизни человека,
приведу и пару он-лайн считалок для перевода одного из параметров в другой.
Калькуляторы предполагают расчёты длины и частоты звуковой волны для воздушной среды при нормальном атмосферном
давлении (760 мм ртутного столба).
Онлайн калькулятор расчёта длины звуковой волны по частоте
|
Частота звуковых колебаний f |
||
Температура Т(°С) (по умолчанию 20°) |
||
Длина волны |
Онлайн калькулятор расчёта частоты по длине звуковой волны
|
Длина волны λ при заданной Т |
||
Температура Т(°С) (по умолчанию 20°) |
||
Частота колебаний |
Полный диапазон звуковых частот условно находится в пределах:
16…20 000 Гц.
Ниже ( 0,001…16Гц ) – инфразвук.
Выше ( 20…100кГц ) – низкочастотный ультразвук,
ещё выше (100кГц…1МГц) – высокочастотный ультразвук.
А для интересующихся приведу таблицу соответствия нот стандартного музыкального звукоряда частотам.
| Частота (Гц) | ||||||||||||
| Октава | Нота | |||||||||||
| До | До — диез | Ре | Ми — бемоль | Ми | Фа | Фа — диез | Си | Си- диез | Ля | Соль-бемоль | Соль | |
| C | C# | D | Eb | E | F | F# | G | G# | A | Bb | B | |
| 0 | 16.35 | 17.32 | 18.35 | 19.45 | 20.60 | 21.83 | 23.12 | 24.50 | 25.96 | 27.50 | 29.14 | 30.87 |
| 1 | 32.70 | 34.65 | 36.71 | 38.89 | 41.20 | 43.65 | 46.25 | 49.00 | 51.91 | 55.00 | 58.27 | 61.74 |
| 2 | 65.41 | 69.30 | 73.42 | 77.78 | 82.41 | 87.31 | 92.50 | 98.00 | 103.8 | 110.0 | 116.5 | 123.5 |
| 3 | 130.8 | 138.6 | 146.8 | 155.6 | 164.8 | 174.6 | 185.0 | 196.0 | 207.7 | 220.0 | 233.1 | 246.9 |
| 4 | 261.6 | 277.2 | 293.7 | 311.1 | 329.6 | 349.2 | 370.0 | 392.0 | 415.3 | 440.0 | 466.2 | 493.9 |
| 5 | 523.3 | 554.4 | 587.3 | 622.3 | 659.3 | 698.5 | 740.0 | 784.0 | 830.6 | 880.0 | 932.3 | 987.8 |
| 6 | 1047 | 1109 | 1175 | 1245 | 1319 | 1397 | 1480 | 1568 | 1661 | 1760 | 1865 | 1976 |
| 7 | 2093 | 2217 | 2349 | 2489 | 2637 | 2794 | 2960 | 3136 | 3322 | 3520 | 3729 | 3951 |
| 8 | 4186 | 4435 | 4699 | 4978 | 5274 | 5588 | 5920 | 6272 | 6645 | 7040 | 7459 | 7902 |